
Как выбрать корпус электродвигателя
Корпус электродвигателя: алюминий или чугун
В зависимости от вида электродвигателя, назначения его конструкции, условий использования, станины электродвигателей отличаются как по своей форме, так и по используемому материалу для ее изготовления. Современные электродвигатели изготавливаются в корпусах двух видов: из алюминиевого сплава или чугуна. Как правило, электродвигатели мощностью от 0,12 до 11 кВт имеют алюминиевую станину, а моторы свыше 11 кВт чугунную. В связи с этими отличиями и технологии их изготовления имеют небольшие отличия.
Электродвигатели с чугунной станиной
Станины из чугуна изготавливаются способом отливки по технологии литья в песчаные формы и в большинстве случаев имеют литые лапы для крепления. При этом обрабатывается плоскость лап, внутренняя поверхность корпуса для посадки сердечника статора, поверхность для посадки подшипниковых щитов. Этот материал обеспечивает отсутствие магнитных нагрузок и жесткость конструкции корпуса. На производствах, где присутствуют высокие вибрации, электродвигатели с чугунной станиной являются необходимым условием

Алюминиевые электродвигатели
Как видите в зависимости от использования агрегата и его условий работы можно подобрать и желаемый материал его станины. У разных производителей может быть возможность изготовления в разных корпусах, а может и отсутствовать. Например, ОАО «Владимирский электромоторный завод» изготавливает серию электродвигателей 5АМХ от 132 до 200 габарита в алюминиевом корпусе. Однако подшипниковые щиты у этих эл двигателей сделаны из чугуна, что обеспечивает им дополнительную прочность. На самом деле двигатели с алюминиевой станиной габарита свыше 200 мм редкость. Такие агрегаты изготавливаются только под заказ, и не каждый производитель справится с этой задачей. Если Вы сомневаетесь, какой материал подойдет именно для вашего оборудования или в выборе эл двигателя, обратитесь к нашим
www.uesk.org
Корпус — электродвигатель — Большая Энциклопедия Нефти и Газа, статья, страница 1
Корпус — электродвигатель
Cтраница 1
Корпуса электродвигателей и пускорегулирующих аппаратов или металлические конструкции, на которых они установлены, заземляют в установках при номинальном напряжении выше 36 в. Исключением являются случаи, когда они установлены в сухих производственных, торговых, конторских помещениях и лабораториях с сухими, плохопроводящими полами ( например, деревянными, асфальтовыми), и при этом невозможно одновременное прикосновение обслуживающего персонала к электрооборудованию и другим заземленным частям. [2]
Корпус электродвигателя изготовлен из стального литья цилиндрической формы. На внутренней поверхности корпуса укреплены сердечники полюсов с уложенными вокруг них обмотками возбуждения. [3]
Корпус электродвигателя имеет опорные лапы для крепления его к раме погрузчика. [5]
Корпуса электродвигателей следует снабдить пластинчатыми глушителями на входе и выходе воздуха из вентиляционных каналов. [6]
Корпус электродвигателя
Корпусы электродвигателей и пусковых приспособлений, а также все металлические части вблизи них, которые могут оказаться под напряжением, должны быть заземлены. [8]
Корпус электродвигателя и пускорегулирующего реостата должны быть изолированы от токоведущих деталей. [9]
Корпус электродвигателя имеет следующие дцаметры: 103; 117; 123 и 138 мм. [10]
Корпуса электродвигателей
Корпус электродвигателя всегда заполнен водой, и во время работы вода непрерывно циркулирует по обмоткам, охлаждая их и смазывая подшипники. [12]
Корпус электродвигателя или электрического аппарата, арматура электрического светильника или труба электропроводки в нормальных условиях не находятся под напряжением относительно земли, что достигается изоляцией от токоведущих частей. Однако при повреждении изоляции любая из этих частей может оказаться под напряжением, нередко равным фазному. Электродвигатель с пробитой на корпус изоляцией часто электрически соединен с машиной, которую он приводит в движение, например установлен на станке. Рабочий, БЗЯЗЩИЙСЯ за рукоятки управления станком, может попасть под напряжение. Чтобы уменьшить опасность поражения людей при повреждении изоляции токоведущих частей, принимают ряд мер. Под защитным заземлением понимают преднамеренное электрическое соединение с землей или ее эквивалентом металлических нетоко-ведущих частей, которые могут оказаться под напряжением. Это соединение должно иметь достаточно малое сопротивление, чтобы в случае замыкания на корпус прикосновение к нему человека не могло вызвать протекание через его тело опасного для жизни тока. [13]
Корпус электродвигателя должен быть заземлен, рубильник огражден, а все провода тщательно изолированы. [14]
Корпуса электродвигателей и металлические оболочки питающих кабелей необходимо надежно заземлять. Пол вокруг двигателя должен быть чистым. [15]
Страницы: 1 2 3 4
www.ngpedia.ru
Строение электродвигателя и его особенности
Электродвигатель – это устройство, назначение которого преобразовывать энергию электрическую в энергию механическую. Его главными элементами, которые помогают выполнять данное условие, являются ротор и статор. При этом, ротор – это вращающийся компонент двигателя, в то время как статор находится в неподвижном состоянии. Благодаря подаваемому напряжению возникает электромагнитное поле, которое и вращает ротор, выполняя механические действия. В зависимости о того, какие принципы используются в устройстве электродвигателей, их различают по следующим параметрам:
- По типу питания:
- Электродвигатели постоянного тока, работающие от блоков питания, аккумуляторных батарей и прочих источников;
- Электродвигатели переменного тока, работающие от электрических сетей.
- По принципу работы:
- Синхронные, состоящие из обмоток на роторе и щёточного механизма, предназначенного для подачи электрического тока на эти же обмотки;
- Асинхронные двигатели, не имеющие на роторе ни щёток, ни обмоток. Скорость вращения такого мотора медленнее, чем у созданного магнитного поля статора, что отличается от синхронных.

На сегодняшний день, любой каталог электродвигателей имеет в своём наборе больше агрегатов асинхронного действия. В корпусе такого двигателя установлены обмотки статора, создающие при вращении магнитное поле. Для охлаждения такой системы используется вентилятор, устанавливаемый на конце вала электродвигателя. При этом понятно, что вал и ротор являются одним целым. Изготовляется он из металлических, замкнутых между собой с обеих сторон стержней. Такая конструкция считается самой долговечной, надёжной и безотказной. Поэтому, если поломки и возникают, то это получается не из-за износа стержней, а через короткие замыкания либо износ подшипников.
Если же необходимо вращение в постоянной скорости с возможностью её регулировки, особенно в бытовых условиях, используют синхронный электродвигатель, работающий на переменном токе. Этот тип двигателя, не превосходит асинхронный в системе защиты от перепадов напряжения, коротких замыканий и прочих воздействий, поэтому, применяемая система плавного пуска электродвигателя здесь будет так же обязательным условием. Состоит синхронный двигатель из следующих элементов:
- металлический корпус;
- обмотки полюса;
- ротор или якорь, на котором имеются обмотки;
- коллектор или токосъёмное кольцо, к которым припаяны выводы с упомянутых выше обмоток;
- графитовые стержни, передающие напряжение на коллектор.
В процессе работы синхронного двигателя между потоком магнитных полей в обмотке возбуждения и током ротора возникает взаимодействие, которое создаёт вращающий момент. Если выполнять смену направления тока, будет выполняться и смена направления магнитных потоков. Это явление будет поддерживать вращение вала в одном и том же направлении. Для смены скорости таких двигателей, прежде всего, используют метод изменения напряжения, подаваемого в определённой величине на электродвигатель. Благодаря видоизменениям конструкций и мощностным показателям, двигатели переменного тока представлены к продаже в самом разнообразном модельном ряде, позволяющим использовать приводы не только в промышленных целях, но и бытовых, сельскохозяйственных и многих прочих.
Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Вт)
epusk.ru
Полезная модель относится к области электротехники, а именно, к корпусам электрических машин, например, асинхронного двигателя, предназначенного для привода лифтовых лебедок.
Технический результат полезной модели заключается в надежном креплении статора с обмоткой в корпусе, отсутствии угловых смещений статора при возникновении больших крутящих моментов при пуске двигателя, повышении надежности работы двигателя, повышении технологичности сборки.
Корпус асинхронного двигателя состоит из двух половинок, которые, охватывая наружный диаметр сердечника статора, стягиваются с помощью четырех болтовых соединений, внутренний диаметр корпуса выполнен на 1 мм меньше наружного диаметра сердечника статора, на внутренней поверхности корпуса имеются ребра, которые упираются в прямоугольную часть поверхности сердечника статора.
Благодаря такой конструкции корпуса асинхронного двигателя, исключаются угловые смещения статора в корпусе, повышается надежность работы двигателя.
Полезная модель относится к области электротехники, а именно, к корпусам электрических машин, например, асинхронного двигателя, предназначенного для привода лифтовых лебедок.
Известны литые стальной и чугунный корпусы, которые трудоемки в изготовлении и при сборке (1).
Наиболее близким техническим решением, выбранным как прототип, является корпус асинхронных машин полого профиля, стандартных высот оси вращения, изготовленный из алюминиевого сплава, имеющий на наружной поверхности охлаждающие ребра, внутренний диаметр наружного диаметра сердечника статора (2).
Недостатками конструкции корпуса, если использовать двигатель в приводе лифтовых лебедок, где присутствуют частые пуски и возникают большие крутящие моменты, является сложность фиксации статора в корпусе, не обеспечивается жесткое соединение корпус- статор.
Технический результат полезной модели заключается в надежном креплении статора с обмоткой в корпусе, отсутствии угловых смещений статора при возникновении больших крутящих моментов при пуске двигателя, соответственно, повышении надежности работы двигателя, повышении технологичности сборки.
Указанный технический результат достигается тем, что корпус асинхронного двигателя стандартных высот оси вращения, полого профиля, изготовленный из алюминиевого сплава, имеющий на наружной поверхности охлаждающие ребра, внутренний диаметр наружного диаметра сердечника статора, состоит из двух половинок, которые, охватывая наружный диаметр сердечника статора, стягиваются с помощью четырех болтовых соединений, внутренний диаметр корпуса выполнен на 1 мм меньше наружного диаметра сердечника статора, на внутренней поверхности корпуса имеются ребра, которые упираются в прямоугольную часть поверхности сердечника статора.
Благодаря тому, что изменена конструкция корпуса асинхронного двигателя, а именно, корпус состоит из двух половинок, которые охватывая наружный диаметр сердечника статора, стягиваются с помощью четырех болтовых соединений, внутренний диаметр корпуса выполнен на 1 мм меньше наружного диаметра сердечника статора, на внутренней поверхности корпуса имеются ребра, которые упираясь в прямоугольную часть поверхности сердечника статора, исключают угловые смещения статора, он надежно крепится в корпусе, повышается надежность работы двигателя, повышается технологичность сборки.
Сопоставительный анализ с прототипом позволяет сделать вывод, что заявляемый корпус асинхронного двигателя отличается тем, что состоит из двух половинок, которые охватывая наружный диаметр сердечника статора, стягиваются с помощью четырех болтовых соединений, внутренний диаметр корпуса на 1 мм меньше наружного диаметра сердечника статора, на внутренней поверхности корпуса выполнены ребра, которые упираются в прямоугольную часть поверхности сердечника статора.
Таким образом, заявляемый корпус соответствует критерию «новизна».
Сущность полезной модели поясняется чертежом, где показан общий вид корпуса асинхронного двигателя.
Корпус 1 асинхронного двигателя состоит из двух половинок, которые, как «хомут» охватывая наружный диаметр сердечника статора 2, стягиваются четырьмя болтовыми соединениями (по два с каждой стороны), при этом внутренний диаметр корпуса выполнен на 1 мм меньше наружного диаметра сердечника статора. Сердечник статора шихтованный из листов электротехнической стали, состоит из пакетов, развернутых по отношению друг к другу на угол 90 градусов, и имеет прямоугольно-цилиндрическую форму. На внутренней поверхности корпуса имеются ребра 3, которые упираясь в прямоугольную часть поверхности сердечника статора, предотвращают последний от угловых смещений.
Такая конструкция корпуса позволяет надежно крепить статор с обмоткой в корпусе и предотвращает статор от угловых смещений при возникновении больших крутящих моментов при частых пусках двигателя, повышается технологичность сборки, повышается надежность работы двигателя в целом.
Испытания, проведенные на ОАО «Сарапульский электрогенераторный завод», подтверждают полезность предлагаемой полезной модели.
Источники информации:
1. Гурин Я.С., Кузнецов Б.И. Проектирование серий электрических машин, М., «Энергия», 1978, стр.72-73.
2. Описание изобретения к патенту РФ RU 2 280 938, МПК Н02К 5\18, Н02К 5\04, опубл. 27.07.2006 Бюл. 21.
Корпус асинхронного двигателя стандартных высот оси вращения, полого профиля, изготовленный из алюминиевого сплава, имеющий на наружной поверхности охлаждающие ребра, внутренний диаметр наружного диаметра сердечника статора, отличающийся тем, что состоит из двух половинок, которые, охватывая наружный диаметр сердечника статора, стягиваются с помощью четырех болтовых соединений, внутренний диаметр корпуса выполнен на 1 мм меньше наружного диаметра сердечника статора, на внутренней поверхности корпуса имеются ребра, которые упираются в прямоугольную часть поверхности сердечника статора.
poleznayamodel.ru
Корпус электродвигателя — Энциклопедия по машиностроению XXL
Корпусы электродвигателей и их пусковую аппаратуру необходимо заземлять. Заземление должна иметь и шахтная пневматическая сеть, которая может попасть под напряжение при соприкосновении с оголенными кабелями, контактным проводом и т. п. Шахтная пневматическая сеть должна иметь такую коммутацию, чтобы ее можно было использовать для доставки воды при тушении пожаров. [c.281]Корпус механизма (рис. 29.18, е) состоит из двух плат 12 и 13, скрепленных тремя поперечными пластинами 16, 17 к 18 с загнутыми краями. К плате 12 винтами прикреплен ВЗР с двумя жесткими колесами и встроенным в его корпус электродвигателем Дв. От колеса 1 выходного валика ВЗР к валику ведущего барабана 4″ движение передается через зубчатую передачу, смонтированную между платой 12 и прикрепленной к ней тремя стойками 19 малой платой 14. В связи с тем, что частота вращения валиков зубчатой передачи очень малая, используются подшипники скользящего трения. Для получения четырех скоростей ленты блоки зубчатых колес 2 —2″ и 4- » передвигаются и фиксируются в соответствующих положениях посредством вилок 15, которые расположены па двух стойках, поддерживающих малую плату 14. Ведущий бара- [c.430]
Конусно-дисковый тормоз, прикрепляемый к корпусу электродвигателя, показан на фиг. 158. На вал 2 двигателя посажен на щпонке диск 3, на ободе которого помещено кольцо 5, имеющее торцовую и конусную рабочие поверхности. С помощью направляющих шпонок 11 это кольцо соединяется с диском 3. [c.247]
Для снижения магнитных вибраций, передаваемых на корпус электродвигателей, осуществляется упругая подвеска магнитной системы (в машинах постоянного тока) или железа статора (в машинах переменного тока). [c.262]
При выполнении указанных выше условий опоры попадают в узлы колебаний, а поэтому передача вибраций с магнитной системы на корпус электродвигателя будет минимальной. [c.263]
Приводной механизм агрегата состоит из редуктора 14, выполненного в сварном корпусе электродвигателя 12 и цепной передачи 13. Приводной механизм установлен на нижней плите каркаса и закрыт щитами. [c.229]
Насосы реактора БР-5. Выемная часть насоса первого контура (рис. 5.22) погружена в бак 17, который одновременно служит и компенсатором объема. Для успокоения натрия в нем предусмотрены специальные ребра. Вал 14 вращается в двух сферических самоустанавливающихся роликоподшипниках 5 и 10, расположенных в корпусе электродвигателя. Смазка подшипников консистентная. Нижний подшипник охлаждается аргоном, который циркулирует внутри насоса. Чтобы уменьшить приток тепла к подшипнику, вал выполнен пустотелым. Циркуляция аргона обеспечивается установленным на валу электродвигателя вентилятором. Верхний подшипник охлаждается встроенным холодильником. [c.161]
Электрические машины для винтовых соединений (фиг. 97) представляют собой переносное нанометром, устройство, заключающее в одном корпусе электродвигатель, замедляющую зубчатую передачу, муфту, передающую момент установленной величины, и шпиндель. На шпиндель могут устанавливаться [c.254]
По исполнению корпуса электродвигатели выбираются в зависимости от окружающей среды согласно табл. 12 [17 и 19]. [c.466]
Деталь Корпус электродвигателя № 110. Операция Заливка металла в кокиль. Технологическая карта № 74. Материал Сплав А-9. Вес детали 11,5 кг. Основные габариты детали в мм D = И0 L = 180. Количество участвующих рабочих — 1. [c.456]
Электропровод должен быть проложен в металлических трубках все рубильники должны иметь кожухи. Трубы, в которых проложен электропровод, металлические корпуса и кожухи рубильников, корпуса электродвигателей и электроприборов должны быть надежно заземлены. [c.164]
| Фиг. 19. Электросверлилка И- 8Б I — корпус электродвигателя 2 корпус редуктора J — шпиндель 4 — присоединительный кабель с вилкой S — рукоятка с выключателем 6 — фильтр подавления помех радиоприему. | 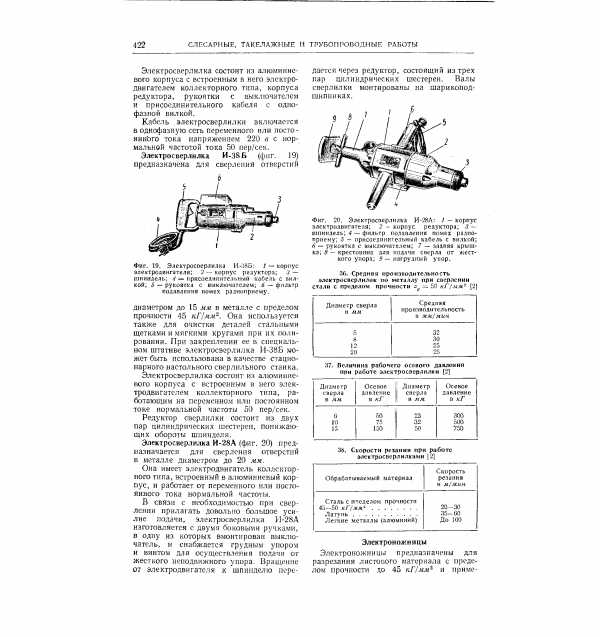 |
| Фиг. 22, Электроножницы И-31 /—корпус электродвигателя 2 — корпус редуктора 3 — рычаг с подвижным ножом — улитка с неподвижным ножом . 5 — рукоятка с выключателем 5 — присоединительный кабель с вилкой. | 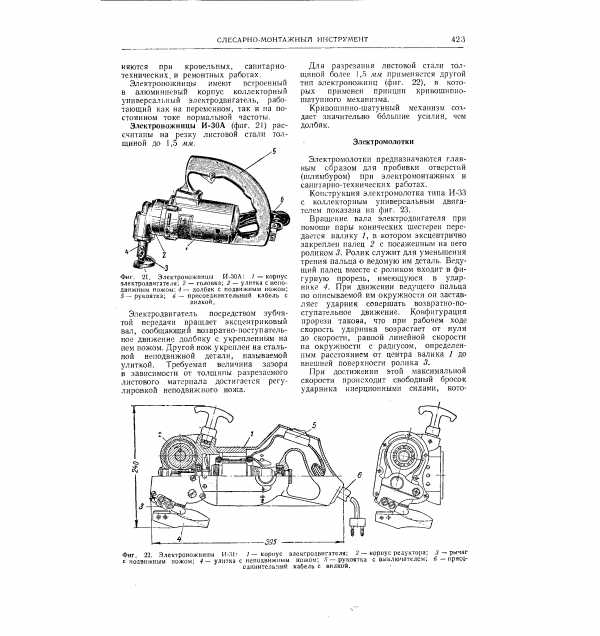 |
Для ускорения затухания свободных колебаний подвижной системы, возникающих от случайных причин, станок снабжен жидкостным демпфером 2 (фиг. 8), подвижная часть которого жестко соединена с корпусом электродвигателя. Бак демпфера закрепляют на нижней части станины и заливают обычно автомобильным маслом (типа Нигрол ). В состав электросиловой части станка входят электродвигатель 8, электромагнит 34 (фиг. 10), пакетный выключатель 10 (фиг. 8), кнопки управления 4 и силовой щит 11, на котором монтируют магнитный пускатель 12 и предохранители 9 нормального типа. Электрическая схема балансировочного станка приведена на фиг. 11. [c.353]
Опыты проводились при жесткости шпиндельного узла 330 дан мм и жесткости шпин-,деля в опорах качения относительно корпуса электродвигателя 2000 дан мм. [c.389]
На основе данных экспериментов построены графики зависимости двойной амплитуды корпуса электродвигателя типа МД от дисбалансов ротора в сборе с инструментом (рис. 2, а). [c.389]
Двойная амплитуда колебаний корпуса электродвигателя с дополнительной массой п жесткой установкой без инструмента составляла 0,01 мм при /г = 3000 и 6000 об/мин. Максималь- [c.389]
В качестве примера на рис. 15 показана задняя опора мотор-весов с устройством для снижения потерь на трение. На фланце-ступице 12, закрепленном на корпусе электродвигателя 14, установлен шариковый сферический подшипник 8. Верхняя обойма подшипника запрессована [c.32]
У кранов с электрическим приводом при питании от внешней сети металлоконструкции, а также все металлические части электрооборудования, не входящие в электрическую цепь, но могущие оказаться под напряжением вследствие порчи изоляции (корпуса электродвигателей, кожухи аппаратов, металлические оболочки проводов и кабелей, защитные трубы и т. п.), должны быть заземлены в соответствии с Правилами устройства электроустановок. [c.527]
Необходимо проверить наличие заземления корпусов электродвигателя, магнитной станции (контакторной панели) и всей другой электроаппаратуры, расположенной в машинном и блочном помещениях, шахте и кабине, убедиться в отсутствии повреждений у заземляющих проводов. Присоединение этих проводов к корпусам должно быть надежным и легко доступным для осмотра. В качестве проводов заземления допускается использование направляющих и металлоконструкции шахты, если величина сопротивления заземления не превышает 4 ом. [c.759]
Корпуса высоконапорных насосов, компрессоров, турбин изготовляют из чугунов повышенной прочности или стального литья. Плиты, угольники, кронштейны, корпуса электродвигателей льют из сталей 15Л, ЗОЛ, 40Х, 12Х2Н4А. Небольшие корпусные детали изготавливают из бронзы, алюминиевых и специальных сплавов. Для мелкосерийного и единичного производства иногда более рационально применять сварные заготовки корпусных деталей из листовой стали марок СтЗ, Ст4, Ст5. Штампо-сварные картеры задних мостов автомобилей делают из стали 35, 40. [c.229]
Червяк 1, жестко связанный с валом а электродвигателя 4, вращается вокруг неподвижной оси А, входя в зацепление с червячным колесом 2, вращающимся вокруг оси В коробки Ь, лсестко связанной с корпусом электродвигателя 4. Шатун 3, жестко связанный с колесом 2, входит во вращательную пару С с коромыслом 5, вращающимся вокруг неподвижной оси D. При вращении вала а вокруг своей оси электродвигатель 4 вместе с лопастями d вентилятора поворачивается вокруг оси О, [c.433]
Известна только одна конструкция такого механизма возбудителя (рис. 31), обладающая указанным свойством и получившая применение в стационарных испытательных машинах [II]. Схема возбудителя состоит из кривошипного вала 5, находящегося в эксцентричной расточке корпуса 3, который вращается на двух подшипниках от главного электродвигателя (на рисунке он не показан). Изменение результирующего эксцентриситета достигается путем, изменения углового взаиморасположения кривошипйого вала и корпуса, для чего служит встроенный в корпус электродвигатель 2, получающий питание через токосъемные кольца 1 и соединенный с кривошипным валом с по- [c.59]
Упругоамортизированная подвеска магнитной системы в машинах постоянного тока легче всего осуществляется в электродвигателях, имеющих поворотную магнитную систему, позволяющую производить замену полюсов без демонтажа электродвигателя. Поворотная магнитная система 1 скользит на особых упругих опорах 2 в корпусе электродвигателя 3 (рис. VI. 10). Основны- [c.262]
| Рис. 11.15. Схема двухмассового маятникового вибратора. Корпус электродвигателя 1 с дебалансами 2 присоединен с помощью щарнира 3 к траверсе 4, которая посредством щарнира 5 (оси шарниров i и 5 взаимно перпендикулярны) присоединена к основанию 6, монтируемому на рабочем органе вибромашины (рис. 11.15, й). Массы вибратора подбираются так, чтобы ось дебалансного вала проходила через центр качания физического маятника, имеющего ось подвеса в шарнире 5, тогда горизонтальная составляющая центробежной силы не передается основанию. Можно допустить совпадение центра тяжести двигателя с осью шарнира 3, при этом горизонтальная составляющая вектора-момента также не передается основанию и уравновешивается моментом сил инерции, возникающим при качании дебалансного вала вокруг оси шарнира 3. Виброприемник испытывает (рис. 11.15,6) силу | 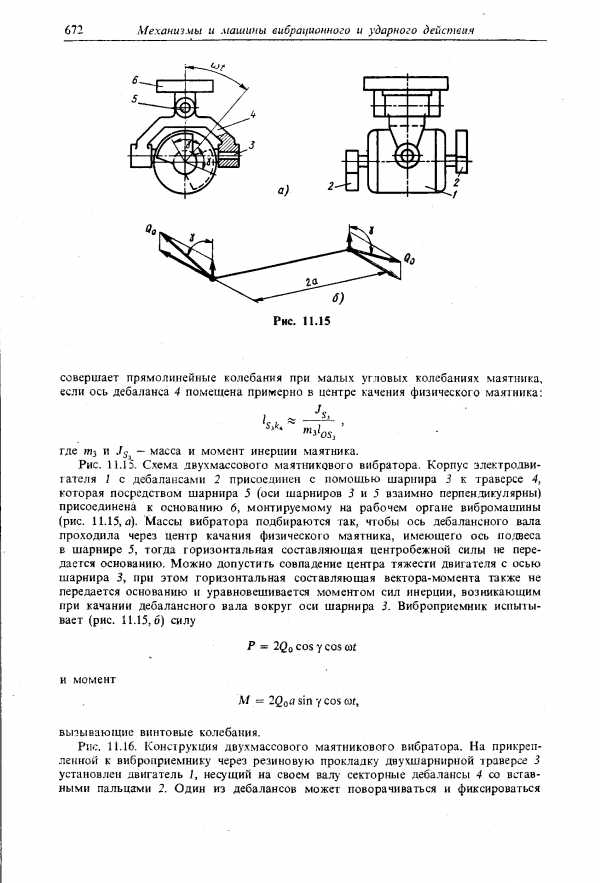 |
| Рис. 11.90. Виброшпалоподбойник, применяемый для уплотнения грунта под шпалами. К корпусу электродвигателя 1 упруго подвешен эксцентриковый вибратор 2, к корпусу которого крепится державка 3 для инструмента, выполняющего подбивку. | 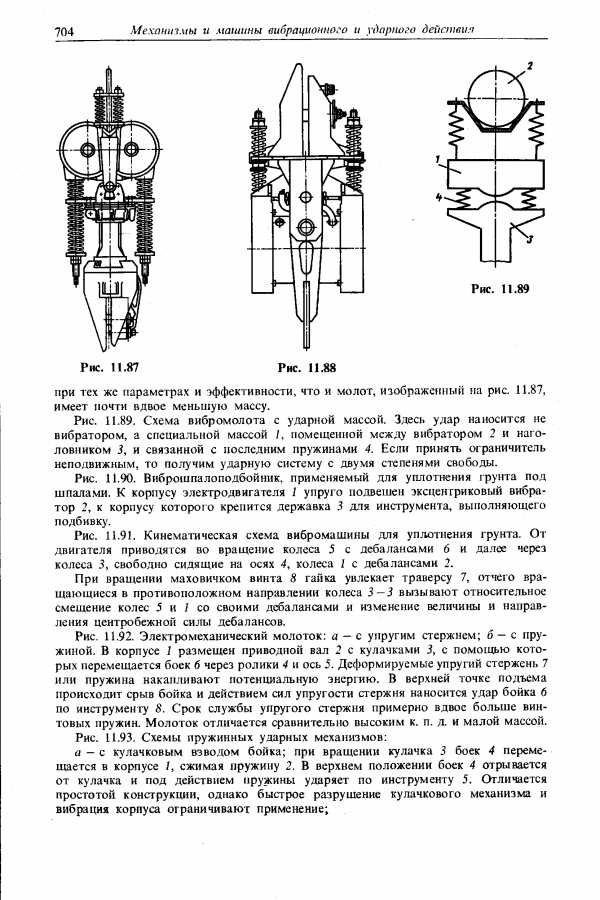 |
Динамическая модель колебательной системы высокоскоростной ультрацентрифуги представлена на рис. 1. Гибкий вал привода ультрацентрифуги нижним своим концом закреплен в роторе электродвигателя, который вращается в жестких подшипниках скольжения корпуса (статора) и не может перемещаться относительно него в поперечном направлении. Кроме того, между валом и корпусом находятся две упругие связи (первая ступень подвески), одна из которых, нижняя (податливая опора) /кесткостью с. неизменно соединяет вал с корпусом, а вторая, верхняя жесткостью Сд (ограничитель амплитуды) включается в работу только при превышении амплитуды колебаний сверх установленной величины. На верхнем конце гибкий вал несет тяжелый массивный ротор, причем точка закрепления ротора на валу не совпадает с его центром масс. В свою очередь, корпус электродвигателя установлен на гибком стержне, образующем вторую ступень подвески. Этот стержень, жесткий относительно продольных перемещений, имеет сравнительно небольшую жесткость на изгиб, равную или соизмеримую с жесткостью вала, и допускает значительные перемещения корпуса в поперечном направлении. [c.44]
В передачах типа Sespa натяжение peMfie/i саморегулируется в аапи-симости от передаваемой мощности двумя способами 1) поворотным корпусом электродвигателя (фиг. 10 в табл. 2) — используется электрический реактивный момент на эксцентрично подвешенном статоре 2) поворотным шкивом (фиг. И) — используется механический реактивный момент на качающемся звене от окружной силы в зубчатой передаче. [c.672]
Ф г. 21. Электроножпицы И-ЗОА / — корпус электродвигателя 2 — головка S — улитка с неподвижным ножом 4— долбяк с подвижным ножом 5 — рукоятка — присоединительный кабель с вилкой. [c.423]
Преимущества указанной шлифовальной машины заключаются в удобстве пользования головками при выполнении эачнст-ных или шлифовальных работ. Рабочему не приходится держать в руках тяжелый корпус электродвигателя, устанавливаемый обычно на полу цеха в пределах длины гибкого вала. Ему приходится оперировать только с легкими сменными головками весом, не превышающим 1,5-2 к1. [c.425]
Для постановки деталей с дополнительным креплением (например, зубчатых колес, туго насаживаемых па шпонках) для точного центрирования — при посадке подшипниковых щитов в корпусе электродвигателя, фланцевого корпуса подшипника шпинделя в корпусе передней бабки токарного станка и т. п. Средние натяги близки к нулю, что упрощает сборку и разборку, обеспечивают хорошее центрировагше. [c.161]
Во время работы машины контролируют по амперметру электродвигателя нагрузку, которая должна соответствовать режимной карте, следят за изменением шума при вращении, температурой подшипников и корпуса электродвигателей, а также за отсутствием вблизи них парений и течи, исправностью заземления корпусов электродвигателей, пусковых устройств и т. п. Вахтенный персонал котельной не производит самостоятельно никаких работ по электроустройствам и обязан вызвать I в случае необходимости электротехника. [c.209]
До начала работ мастер обязан вызвать электромонтера, который присоединяет и в присутствии бригадира котлочистов проверяет состояние электрооборудования, проводку к электродвигателю и осветительную сеть. Корпус электродвигателя должен быть заземлен, ручки рубильников не должны проводить ток. Для управления электродвигателем должны иметься исправные, проверенные диэлектрические перчатки. [c.57]
Состояние заземления металлических нетоковедущих частей электрооборудования электрических кранов (корпусов электродвигателей, контроллеров, каркасов, щитов, ящиков сопротивления и др.), проверяется замером и осмотром. Если в качестве заземляющего проводника применяется провод (заземление металлического корпуса кнопочного аппарата электроталн), следует убедиться, что он не имеет обрывов. [c.588]
Правилами вдоль всего фронта ванн предусмотрены деревянные решетки, покрытые ковриками из рифленой резины. Испарения хлористого электролита осталивания весьма интенсивно действуют на все металлические конструкции, в том числе и на подкрановый путь и катки грузоподъемного механизма, которые быстро покрываются толстым слоем ржавчины и не обеспечивают заземления двигателя грузоподъема. Из этого следует, что резиновые коврнкн на участке осталпвапня особенно необходимы. Более того, кроме обычной схемы заземления грузоподъемного механизма (заземление подкранового пути), необходимо протянуть заземляющий проводник от кнопочной станции к корпусу электродвигателя и далее вдоль питающего кабеля до какой-либо надежно заземленной точки, где устроить надежный и хорошо защищенный от паров электролита контакт. [c.120]
mash-xxl.info
Устройство, принцип работы и подключения электродвигателей переменного тока | Полезные статьи
Электродвигатели переменного тока являются электротехническими устройствами, которые преобразовывают электрическую энергию в механическую. Электромоторы нашли широкое применение во многих отраслях промышленности для привода всевозможных станков и механизмов. Без такого оборудования невозможна работа стиральных машин, холодильников, соковыжималок, кухонных комбайнов, вентиляторов и других бытовых приборов.
По принципу работы электродвигатели переменного тока делятся на синхронные и асинхронные. Асинхронные электромоторы переменного тока наиболее часто применяются в промышленности.
 Асинхронный двигатель с креплением к фланцу
Асинхронный двигатель с креплением к фланцу
Стоит рассмотреть устройство электродвигателя переменного тока асинхронного.
Данный вид электромоторов состоит из главных частей — статора и ротора. В современных асинхронных электромоторах статор имеет неявно выраженные полюсы.
Для того чтобы максимально снизить потери от вихревых токов, сердечник статора изготавливают из соответствующей толщины листов электротехнической стали, подвергшихся штамповке. В пазы статора впрессовывается обмотка из медного провода. Фазовые обмотки статора устройства могут соединяться «звездой» или «треугольником». При этом все начала и концы впрессованных обмоток электромотора выводятся на корпус — в клеммную коробку. Подобное устройство статора электродвигателя оправданно, так как дает возможность включать его обмотки на различные стандартные напряжения. Сердечник статора запрессовывается в чугунный или алюминиевый корпус.
Устройство асинхронного электродвигателя
Ротор асинхронного мотора также состоит из подвергшихся штамповке листов электротехнической стали, и во все его пазы закладывается обмотка.
Учитывая конструкцию ротора, асинхронные электродвигатели подразделяются на устройства с короткозамкнутым ротором и фазным ротором.
Обмотку короткозамкнутого ротора, сделанную из медных стержней, закладывают в пазы ротора. При этом все торцы стержней соединяют при помощи медного кольца. Данный вариант обмотки считается обмоткой типа «беличья клетка». Стоит отметить, что медные стержни в пазах ротора не изолируются. Во многих асинхронных электромоторах «беличью клетку» сменяют литым ротором. Ротор напрессовывается на вал двигателя и является с ним одним целым.
Синхронные электродвигатели устанавливаются в различных электроинструментах, пылесосах, стиральных машинах. На корпусе синхронного электромотора переменного тока имеется сердечник полюса, в котором расположены обмотки. Обмотки возбуждения намотаны и на якорь. Их выводы припаяны ко всем секторам токосъемного коллектора, на которые при использовании графитовых щеток подается напряжение.
Устройство синхронного электродвигателя
Принцип действия электродвигателя переменного тока основан на применении закона электромагнитной индукции. При взаимодействии переменного электрического тока в проводнике и магните может возникнуть непрерывное вращение.
В синхронном электродвигателе якорь вращается синхронно с электромагнитным полем полюса, а у асинхронного электромотора ротор вращается с отставанием от вращающегося магнитного поля статора.
Для работы асинхронного электромотора необходимо, чтобы ротор устройства вращался в более медленном темпе, чем электромагнитное поле статора. При подаче тока на обмотку статора между сердечником статора и ротора возникает электромагнитное поле, которое наводит ЭДС в роторе. Возникает вращающийся момент, и вал электродвигателя начинает вращаться. Из-за трения подшипников или определенной нагрузки на вал, ротор асинхронного двигателя всегда вращается в более медленном темпе.
Принцип работы электродвигателя переменного тока асинхронного заключается в том, что магнитные полюса устройства постоянно вращаются в обмотках электромотора и направление тока в роторе постоянно меняется.
Скорость вращения ротора электромотора асинхронного зависит от общего количества полюсов. Для того чтобы понизить скорость вращения ротора в таком двигателе, требуется увеличить общее количество полюсов в статоре.
В синхронных электродвигателях вращающий момент в устройстве создается при взаимодействии между током в обмотке якоря и магнитным потоком в обмотке возбуждения. При изменении направления переменного тока одновременно меняется направление магнитного потока в корпусе и якоре. При таком варианте вращение якоря всегда будет в одну сторону. Примечательно, что плавная регулировка скорости вращения таких электромоторов регулируется величиной подаваемого напряжения, при помощи реостата или переменного сопротивления.
В зависимости от напряжения сети фазные обмотки статора асинхронного электромотора могут подсоединяться в «звезду» или «треугольник». Схема электродвигателя переменного тока при подключении его в сеть с напряжением 220 Вольт обмотки соединяются в треугольник, а при подключении в сеть 380 Вольт — схема обмоток имеет вид звезды.
cable.ru
Асинхронный электродвигатель. Устройство и принцип действия.
Асинхронный электродвигатель имеет две основные части – статор и ротор. Неподвижная часть двигателя называется статор. С внутренней стороны статора сделаны пазы, куда укладывается трехфазная обмотка, питаемая трехфазным током. Вращающаяся часть машины называется ротор, в пазах его тоже уложена обмотка. Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
В зависимости от конструкции ротора асинхронные двигатели бывают с короткозамкнутым и с фазным роторами. Наибольшее распространение получили двигатели с короткозамкнутым ротором, они просты по устройству и удобны в эксплуатации.
Трехфазная обмотка статора помещается в пазы и состоит из ряда катушек, соединенных между собой. Каждая катушка сделана из одного или нескольких витков, изолированных между собой и от стенок паза.
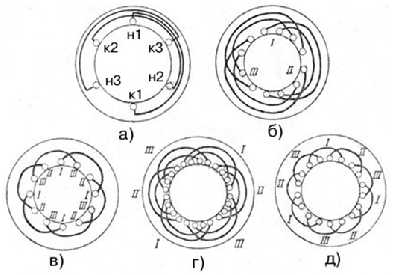
Рис. 1. Различные виды обмотки статора асинхронных электродвигателей
На рис. 1, а) показана обмотка статора асинхронного электродвигателя. У этой обмотки каждая катушка состоит из двух проводников. Обмотка, состоящая из трех катушек, создает магнитное поле с двумя полюсами. За один период трехфазного тока магнитное поле сделает один оборот. При частоте 50 Гц это будет соответствовать 50 об/сек, или 3000 об/мин.
На рис. 1, б) показана обмотка, у которой каждая сторона катушки состоит из двух проводников.
Скорость вращения магнитного поля четырехполюсного статора вдвое меньше скорости вращения поля двухполюсного статора, т. е. 1500 об/мин (при 50 Гц). Обмотка четырехполюсного статора с одним проводником на полюс и фазу показана на рис. 1, в), а с двумя проводниками на полюс и фазу – на рис. 1, г). Магнитное поле шестиполюсного статора имеет втрое меньшую скорость, чем двухполюсного, т. е. 1000 об/мин (при 50 Гц). Обмотка шестиполюсного статора с одним проводником на полюс и фазу представлена на рис. 1, д). Число всех пазов на статоре равно утроенному произведению числа полюсов статора на число пазов, приходящееся на полюс и фазу.
Асинхронный электродвигатель с короткозамкнутым ротором является самым распространенным из электрических двигателей, применяемых в промышленности. Рассмотрим его устройство. На неподвижной части двигателя – статоре 1 – размещается трехфазная обмотка 2 (рис. 2), питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
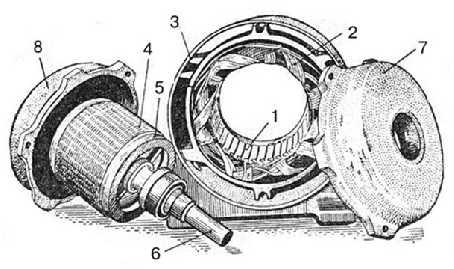
Рис. 2. Асинхронный электродвигатель с короткозамкнутым ротором
Собранный сердечник статора укрепляют в чугунном корпусе 3 двигателя. Вращающуюся часть двигателя – ротор 4 – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам
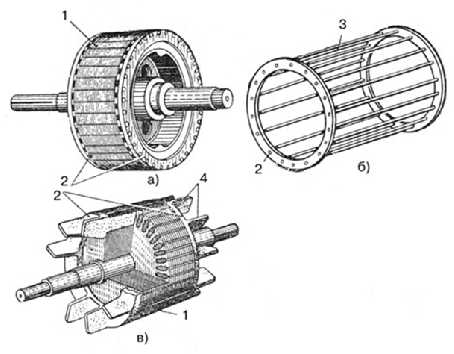
Рис. 3. Короткозамкнутый ротор
а — ротор с короткозамкнутой обмоткой, б — «беличье колесо»,
в — короткозамкнутый ротор, залитый алюминием;
1 — сердечник ротора, 2 — замыкающие кольца, 3 — медные стержни,
4 — вентиляционные лопатки
Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко. Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Устройство статора асинхронного двигателя с фазным ротором и его обмотка не отличаются от устройства статора двигателя с короткозамкнутым ротором. Различие между этими электродвигателями заключается в устройстве ротора.
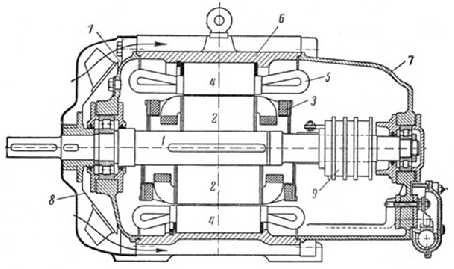
Рис. 4. Разрез асинхронного двигателя с фазным ротором
1 — вал двигателя, 2 — ротор, 3 — обмотка ротора, 4 — статор, 5 — обмотка статора, 6 — корпус, 7 — подшипниковые крышки, 8 — вентилятор, 9 — контактные кольца
Фазный ротор имеет три фазные обмотки, соединенные между собой звездой (реже треугольником). Концы фазных обмоток ротора присоединяют к трем медным кольцам, укрепленным на валу ротора и изолированным как между собой, так и от стального сердечника ротора, вследствие чего этот двигатель получил также название двигателя с контактными кольцами. Три кольца жестко насажены на вал ротора (через изоляционные прокладки). На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек.
Щетки, скользящие по поверхности колец ротора, все время имеют с ними хороший электрический контакт и соединены, таким образом, с обмотками ротора. Щетки соединены с трехфазным реостатом.
Источник: Кузнецов М. И. Основы электротехники. Учебное пособие.
Изд. 10-е, перераб. «Высшая школа», 1970.
motors33.ru