
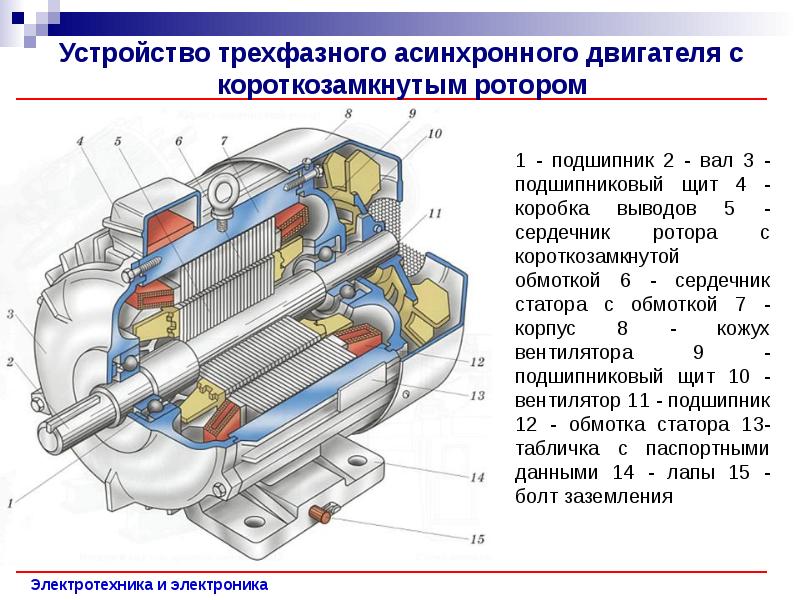
Асинхронные двигатели с фазным ротором
Основная классификация асинхронных двигателей осуществляется в зависимости от особенностей их пусковых свойств, которые определяются нюансами конструкции.
Если рассматривать устройство с фазным ротором, то пуск происходит следующим образом:
- Начало запуска параллельно сопровождается переходом фазного ротора из спокойного состояния к постепенному равномерному вращению, во время которого машина начинает уравновешивать момент сил сопротивления на собственном валу.
- При совершении запуска наблюдается увеличение объемов потребления электроэнергии из сети. Усиленное питание обуславливается необходимостью преодоления тормозного момента, приложенного к валу; передачей движущимся элементам кинетической энергии и компенсацией потерь внутри самого двигателя.
- Начало пускового момента и параметры скольжения в этот период напрямую зависят от активного сопротивления, которое оказывают резисторы, введенные в роторную цепь.

- Иногда показателей малого начального пускового момента бывает недостаточно для того, чтобы перевести асинхронный агрегат в полноценный рабочий режим. В такой ситуации, ускорение не является достаточным, а пусковой электрический ток со значительными показателями воздействует на обмотки двигателя, что вызывает их чрезмерный нагрев. Это может ограничить частоту его включений, а если машина была подключена к электросети с малой мощностью, такой запуск может вызвать понижение общего напряжения, что негативно сказывается на функционировании иных потребителей.
- Благодаря введению в роторную цепь пусковых резисторов происходит понижение показателей электрического тока и пропорциональное увеличение начального пускового момента вплоть до достижения им максимальных параметров.
- Последующее увеличение параметров сопротивления резисторов не является необходимым условием, поскольку оно будет способствовать снижению начального пускового момента и постепенному отклонению от максимальных характеристик его работы. Область скольжения при этом рискует достигнуть недопустимых показателей, что негативно скажется на разгоне ротора.
- Пуск двигателя может быть легким, нормальным или тяжелым, именно этот фактор определит оптимальное значение сопротивления резисторов.
- Далее, необходимо только поддержание достигнутого вращающего момента во время разгона ротора, это позволяет сократить длительность переходного процесса, в котором находится запущенная машина, а также способствует снижению степени нагрева. Для достижения этих целей, осуществляется постепенное понижение показателей сопротивления пусковых резисторов. Параметры допустимого изменения момента зависят от общих условий, которые определяют пиковый предел этого параметра.
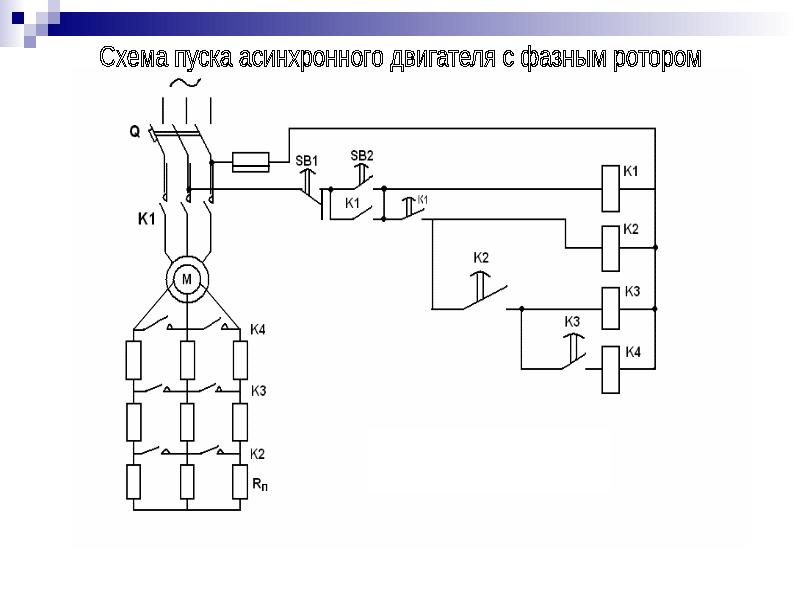
- Процесс переключения разных резисторов осуществляется за счет последовательного подключения контакторов ускорения. На протяжении всего пуска, моменты, во время которых достигаются пиковые значения, являются одинаковыми, а периоды переключения равными между собой.
- Процесс отключения машины от электросети разрешается осуществлять при накоротко замкнутой роторной цепи, поскольку, в противном случае имеется риск возникновения перенапряжения в обмоточных фазах статора.
- Параметры напряжения могут достичь значения, которое превосходит его номинальные показатели в 3-4 раза, если во время отключения машины роторная цепь находилась в разомкнутом состоянии.

 Область скольжения при этом рискует достигнуть недопустимых показателей, что негативно скажется на разгоне ротора.
Область скольжения при этом рискует достигнуть недопустимых показателей, что негативно скажется на разгоне ротора.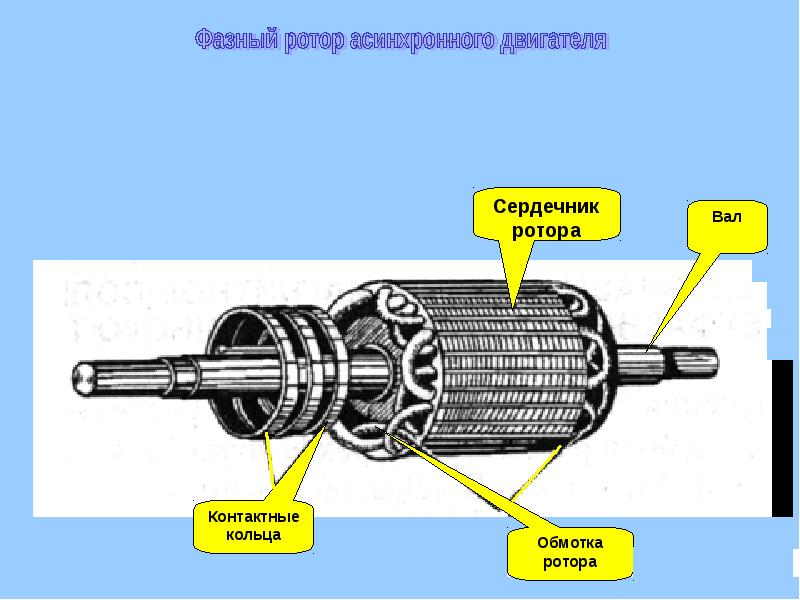
Технические характеристики
Основные требования, которые обеспечивают качественное функционирование асинхронных агрегатов с фазным ротором, определены и указаны в соответствующих ГОСТах.
Именно они определяют главные технические характеристики и к таким параметрам относятся:
- Габариты и мощность двигателя, которые должны иметь показатели, соответствующие техническому регламенту.
- Уровень защиты должен соответствовать условиям, в которых происходит процесс эксплуатации, поскольку различные виды машин могут быть предназначены для установки на улице или только внутри помещений.
- Высокая степень изоляции, которая должна обладать устойчивостью к повышению рабочей температуры и последующему нагреву.
- Различные виды асинхронных двигателей предназначены для использования в определенных климатических условиях. Это касается в первую очередь установки подобных машин в крайне холодных местностях или, наоборот, жарких областях. Исполнение агрегата должно соответствовать климату местности, в которой проходит процесс эксплуатации.
- Полное соответствие режимам функционирования.
- Наличие системы охлаждения, которая должна соответствовать рабочим режимам машины.
- Уровень шума при запуске агрегата на холостом ходу должен соответствовать второму классу или быть ниже его.

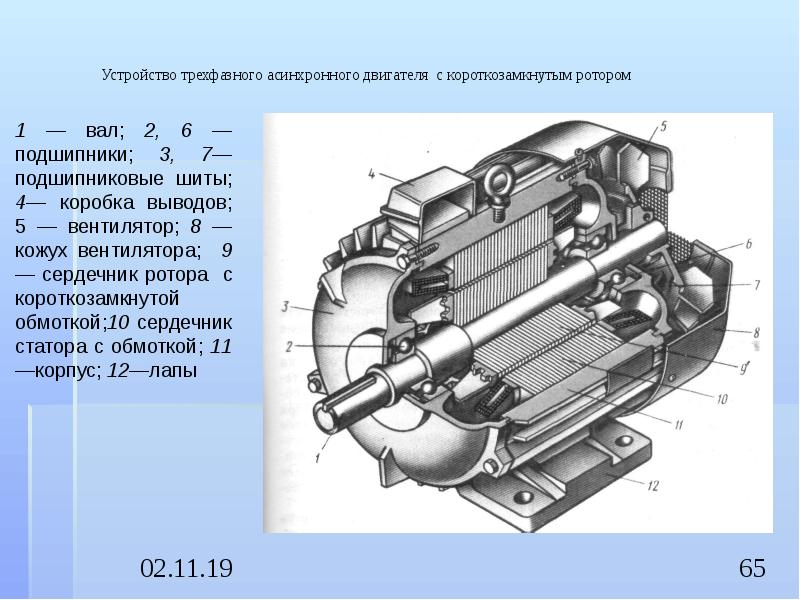
Устройство
Для работы с асинхронными двигателями и полного понимания принципов функционирования подобных машин, необходимо ознакомиться с особенностями их устройства:
- Основными частями конструкции агрегата является статор, находящийся в неподвижном состоянии, и вращающийся ротор, который расположен внутри него.
- Воздушный зазор разделяет оба элемента между собой.
- И статор, и ротор обладают специальной обмоткой.
- Статорная обмотка имеет подключение к питающей электросети с переменным напряжением.
- Роторная обмотка по своей сути является вторичной, поскольку не имеет подключения к сети, а передачу необходимой энергии для нее осуществляет непосредственно статор. Этот процесс происходит благодаря созданию магнитного потока.
- Корпус статора и корпус двигателя – это один элемент, который имеет в своей структуре запрессованный сердечник.
- В пазах сердечника размещены проводники обмотки. Специальный электротехнический лак обеспечивает надежную изоляцию данных объектов друг от друга.
- Обмотка сердечника особым образом разделена на секции, которые соединены в катушки.
- Катушки составляют фазы самого двигателя, к которым происходит подключение фазы от питающей электросети.
- Ротор состоит из вала и сердечника.
- Роторный сердечник создан из набранных пластин, которые изготавливаются из особой разновидности электротехнической стали. На его поверхности имеются симметричные пазы, внутри которых размещены проводники обмотки.
- Роторный вал в ходе работы выполняет функции по передаче крутящего момента непосредственно к приводному механизму машины.
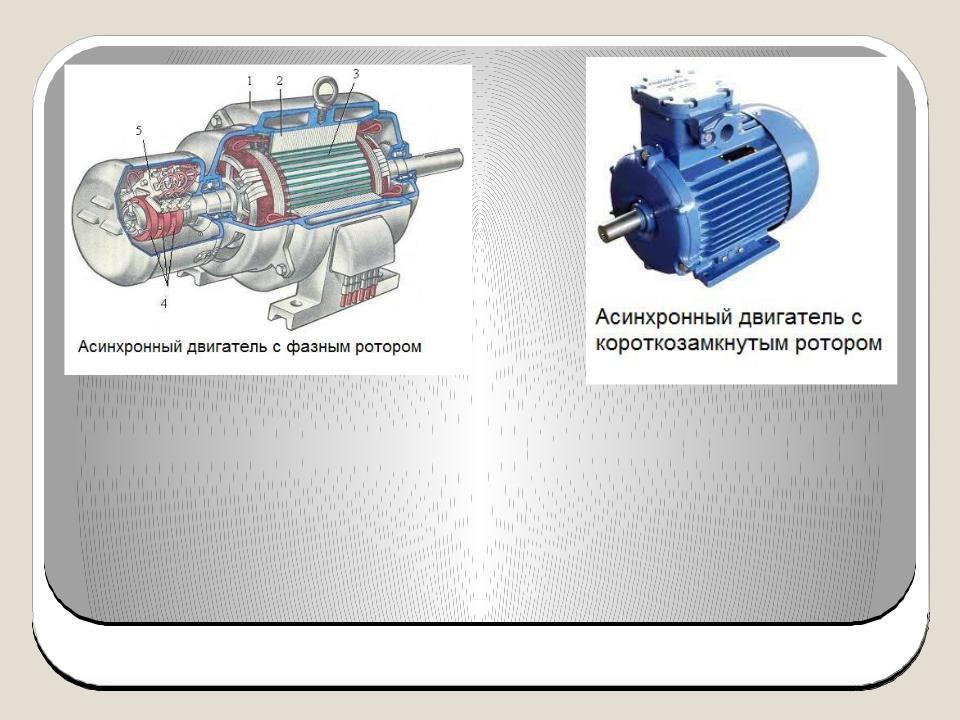
- Роторы обладают собственной классификацией, короткозамкнутая разновидность имеет в своей конструкции стержни, изготовленные из алюминия. Они располагаются внутри сердечника, а на торцах замкнуты специальными кольцами. Подобная система получила название беличьего колеса. В машинах с наиболее высокой мощностью, пазы дополнительно заливаются алюминием, что способствует повышению прочности конструкции.
- Вместо короткозамкнутого ротора в конструкции может присутствовать фазная разновидность. Количество катушек, сдвинутых под определенным углом относительно друг друга, в такой системе зависит от числа парных полюсов. При этом, роторные пары полюсов всегда равны количеству аналогичных пар в статоре. Роторная обмотка соединена особым образом и напоминает по своей форме звезду, а ее лучи выводятся на контакты токосъемных колец, которые соединены при помощи механизма щеточного типа и пускового реостата.

 При этом, роторные пары полюсов всегда равны количеству аналогичных пар в статоре. Роторная обмотка соединена особым образом и напоминает по своей форме звезду, а ее лучи выводятся на контакты токосъемных колец, которые соединены при помощи механизма щеточного типа и пускового реостата.
При этом, роторные пары полюсов всегда равны количеству аналогичных пар в статоре. Роторная обмотка соединена особым образом и напоминает по своей форме звезду, а ее лучи выводятся на контакты токосъемных колец, которые соединены при помощи механизма щеточного типа и пускового реостата.Принцип работы
После освоения устройства асинхронного двигателя с фазным ротором и особенностей его запуска, можно переходить к изучению принципа работы, который заключается в следующем:
- На статор, обладающий тройной обмоткой, начинает подаваться трехфазное напряжение, идущее от внешней электросети с переменным током.
- Последовательно происходит процесс возбуждения магнитного поля, которое начинает совершать вращательные движения.
- Совершаемые вращения постепенно становятся быстрее скорости ротора.
- В определенный момент времени начинает происходить пересечение отдельных линий полей статора и ротора, что обуславливает возникновение электродвижущей силы.
- Электродвижущая сила оказывает прямое воздействие на закороченную обмотку ротора, благодаря чему в ней начинает появляться электрический ток.
- Через определенное время начинает происходить взаимодействие между возникшим в роторе током и статорным магнитным полем, из-за этого образуется крутящий момент, обеспечивающий функционирование асинхронной машины.
Преимущества и недостатки
Востребованность асинхронных двигателей подобного типа на сегодняшний день обуславливается следующими значимыми преимуществами, которыми они обладают:
- Значительные показатели, которых способен достигать начальный вращающий момент после запуска машины.
- Механические перегрузки, которые возникают на протяжении коротких промежутков времени, переносятся агрегатом без каких-либо значимых последствий и не оказывают влияния на процесс функционирования машины.
- При возникновении разнообразных перегрузок в системе, двигатель сохраняет постоянную скорость, возможные отклонения не являются значимыми.
- Показатели пускового тока значительно меньше, чем у большинства асинхронных аналогов, например, имеющих в своей конструкции короткозамкнутый ротор.
- Использование подобных агрегатов предусматривает возможность использования систем, автоматизирующих процесс их запуска и введения в рабочее состояние.
- Конструкция и устройство таких машин являются довольно простыми.
- Запуска агрегата осуществляется по простой схеме, не подразумевающей значимых усилий.
- Относительно невысокая стоимость.
- Обслуживание таких машин не требует значительных затрат сил и времени.
Однако, при таком большом количестве положительных сторон, асинхронные двигатели с фазным ротором обладают и некоторыми недостатками, основными из них являются следующие особенности подобных машин:
- Слишком большие размеры двигателя, которые могут причинять некоторые неудобства при монтаже и эксплуатации.
- Коэффициент полезного действия и общая выработка у них намного ниже, чем у многих аналогов. Разновидность агрегатов с короткозамкнутым ротором значительно превосходит их по этим показателям.

Применение
На сегодняшний день, большая часть двигателей, выпускаемых в промышленных масштабах, относится к асинхронной разновидности.
Благодаря ряду преимуществ, которыми обладают машины с фазными роторами, они широко используются в разных сферах человеческой деятельности, в том числе для поддержания работы:
- Устройств автоматики и приборов из телемеханической области.
- Бытовых приборов.
- Медицинского оборудования.
- Оборудования, предназначенного для осуществления аудиозаписи.
Статья была полезна?
0,00 (оценок: 0)
Асинхронные электродвигатели с фазным ротором
Асинхронные электродвигатели с фазным ротором используются во многих приводах высокой мощности.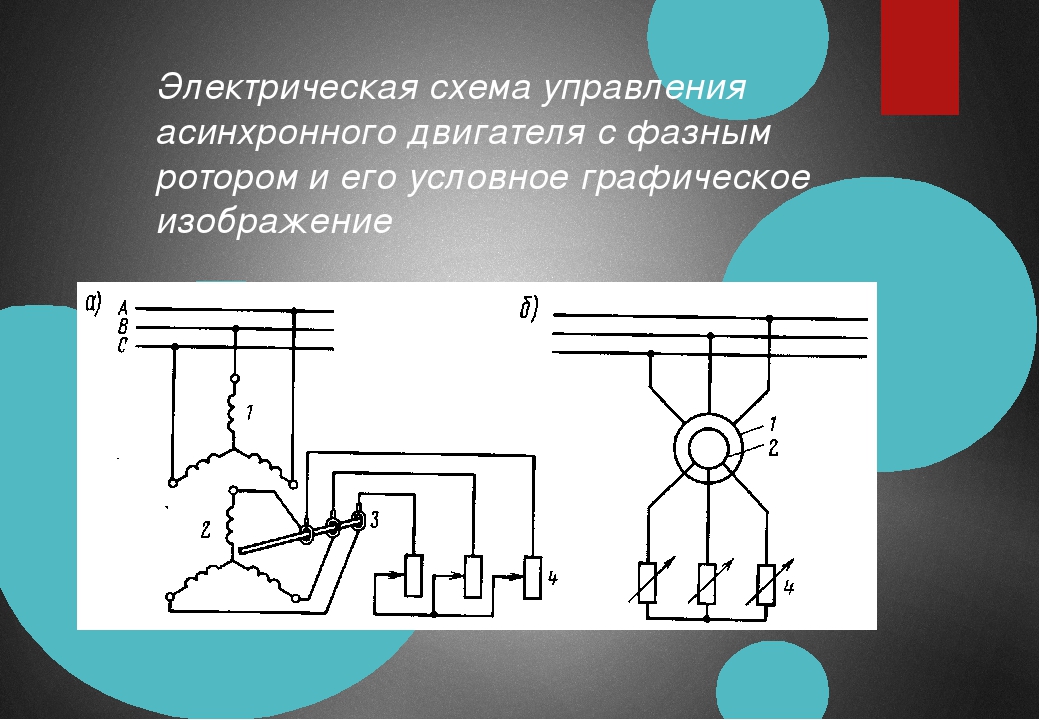 Наиболее часто их применяют в сырьевой промышленности, например, при добыче руды и минералов или на производствах связующих веществ, таких как цемент, известняк и гипс, в различного рода дробильных установках, роликовых прессах и прокатных станах, а также в крупногабаритных вентиляторах, насосах и конвейерах.
Наиболее часто их применяют в сырьевой промышленности, например, при добыче руды и минералов или на производствах связующих веществ, таких как цемент, известняк и гипс, в различного рода дробильных установках, роликовых прессах и прокатных станах, а также в крупногабаритных вентиляторах, насосах и конвейерах.
Асинхронные электродвигатели с фазным ротором используются во многих приводах высокой мощности. Наиболее часто их применяют в сырьевой промышленности, например, при добыче руды и минералов или на производствах связующих веществ, таких как цемент, известняк и гипс, в различного рода дробильных установках, роликовых прессах и прокатных станах, а также в крупногабаритных вентиляторах, насосах и конвейерах.
К сожалению, наиболее прочные и наиболее экономичные асинхронные короткозамкнутые электродвигатели обладают свойством, из-за которого их пуск непосредственно от сети затруднен, а в некоторых случаях невозможен. Так, в состоянии покоя и на небольших оборотах в момент пуска они создают лишь малый крутящий момент, хотя при этом требуют очень сильный ток, превышающий номинальный ток электродвигателя в несколько раз.
Например, для работы загруженного прокатного стана нужен очень большой крутящий момент при пуске или же особый пусковой момент трогания величиной, вероятно, намного превышающей номинальный крутящий момент используемого электродвигателя. Большая инерция загруженного стана приводит к продолжительному периоду выхода на рабочий режим, поэтому нужный высокий крутящий момент необходим в течение продолжительного времени даже при малых оборотах. Если по требованиям технологического процесса пуск выполняется несколько раз в день, то тепловая нагрузка на элементы привода в этом случае довольно высокая, что может ограничивать число пусков.
В случае высокого отношения номинальной мощности электродвигателя к нагрузочной способности сети до электродвигателя большая перегрузка по току при пуске приводит к существенной просадке напряжения, что может вызвать перебои в работе параллельных потребителей.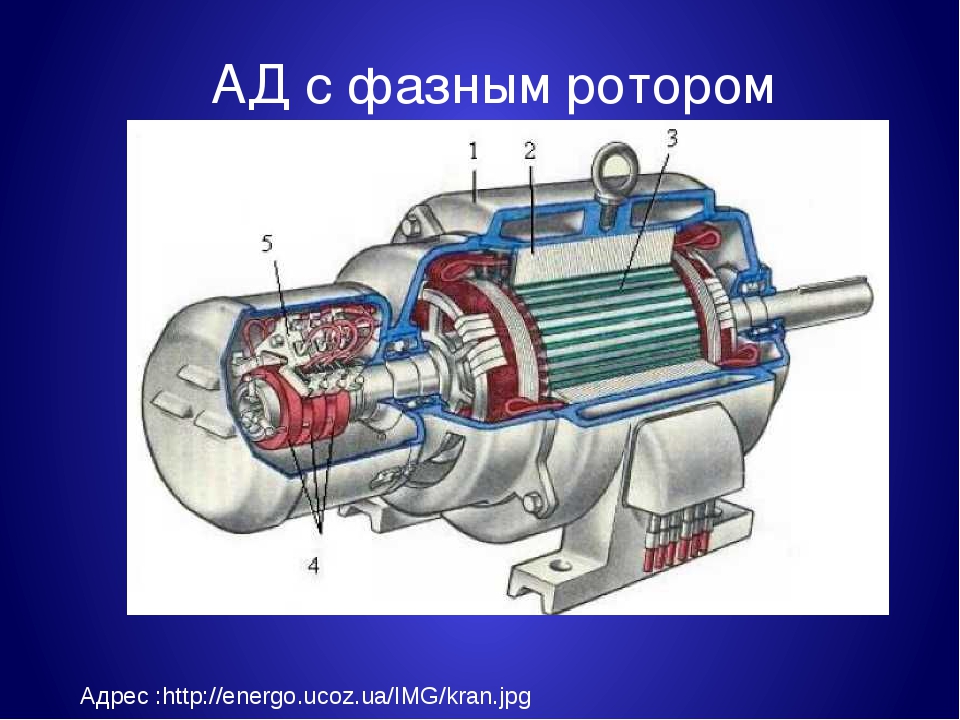
Конструкция асинхронного электродвигателя с фазным ротором при использовании компактного пускового устройства позволяет достичь пусковой момент соизмеримый с максимальным моментом двигателя, что в частности может достигать двух- а то и трехкратному номинальному моменту, при этом пусковой ток соответствует номинальному току двигателя, либо незначительно его больше.
В таких случаях использование асинхронных электродвигателей с фазным ротором является более рациональным. В отличие от частотно-регулируемых приводов, когда для больших пусковых моментов необходимо использовать преобразователи, мощностью большей номинальной, что в номинальном режиме повышает потери, пусковой момент асинхронного двигателя с фазным ротором зависит от его физических свойств, а пусковой реостат работает только в процессе разгона. При изменении пусковой характеристики с помощью изменения внешнего сопротивления роторной цепи возникают лишь незначительно большие потери в двигателе, таким образом количество допустимых пусков не ограничивается нагревостойкостью самого двигателя.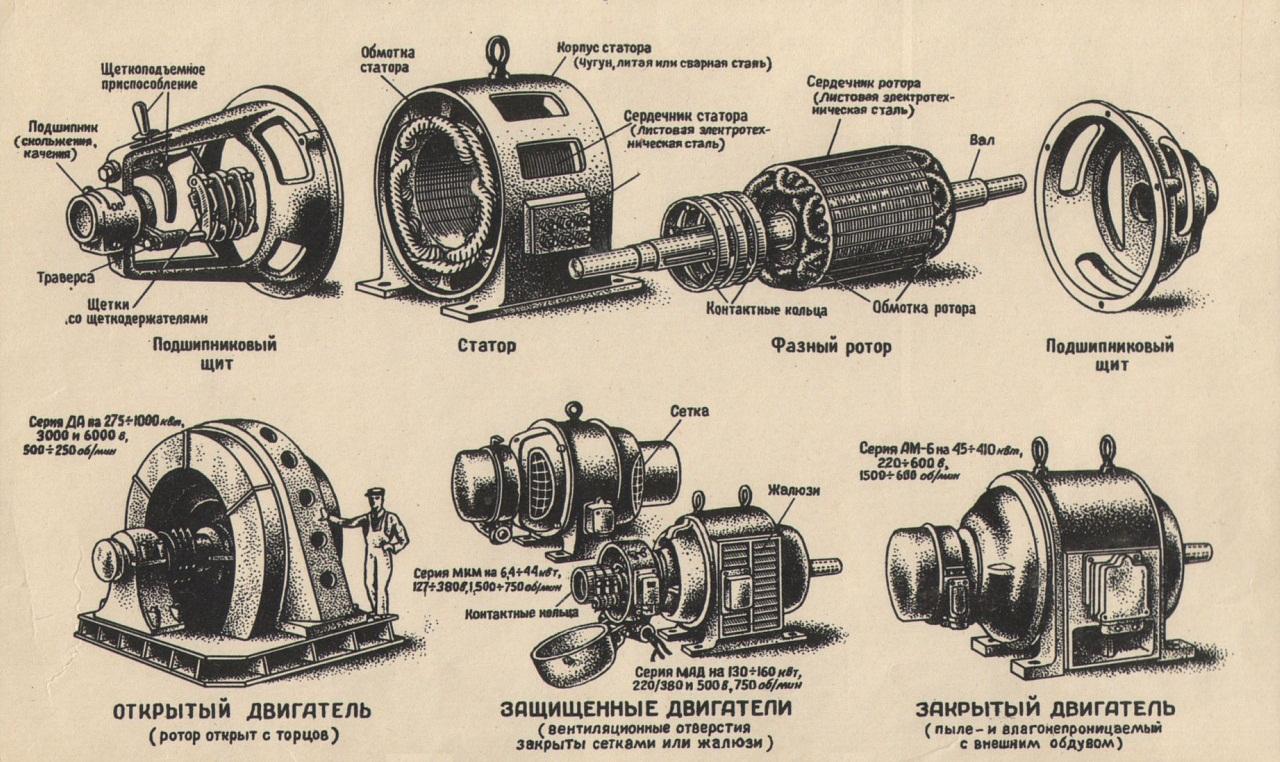
Общая характеристика:
- Очень высокий пусковой крутящий момент, превышающий номинальный в два-три раза
- Низкий пусковой ток, не превышающий или незначительно превышающий номинальный ток
- Ограниченное только пускателем время выхода на рабочий режим и число пусков
- Отсутствующие или крайне низкие пульсации крутящего момента на пуске в зависимости от типа пускателя
- Высокий КПД в режиме непрерывной работы (нет потерь дополнительных устройств)
- Не требуются особые условия окружающей среды
- Нет нелинейных искажений
- Не требуются меры по защите от электромагнитных помех, не требуется экранированный соединительный кабель
Конструкция асинхронных двигателей с фазным ротором
Конструкция асинхронной машины с контактными кольцами представлена на рис. Двигатели этого типа отличаются от короткозамкнутых только устройством ротора.
Статор двигателя может иметь те же разновидности конструктивных исполнений, что и в короткозамкнутом двигателе. Статор двигателя по рис. 6 (с радиальными каналами в магнитопроводе) почти не отличается по конструкции от статора на рис. 3. Статор состоит из станины 7, в которой при помощи нажимных шайб 5 и шпонок 7 укреплены пакеты магнитопровода, набранные из кольцевых пластин 2. Для образования каналов между пакетами служат распорки 4. В пазы магнитопровода статора уложена двухслойная обмотка, катушки 30 которой связаны между собой соединениями 8. Выводные концы обмотки статора сосредоточены в выводной коробке 23. К фундаменту станина крепится лапами 22. Для подъема двигателя при монтаже служат рымы 6.
Статор двигателя по рис. 6 (с радиальными каналами в магнитопроводе) почти не отличается по конструкции от статора на рис. 3. Статор состоит из станины 7, в которой при помощи нажимных шайб 5 и шпонок 7 укреплены пакеты магнитопровода, набранные из кольцевых пластин 2. Для образования каналов между пакетами служат распорки 4. В пазы магнитопровода статора уложена двухслойная обмотка, катушки 30 которой связаны между собой соединениями 8. Выводные концы обмотки статора сосредоточены в выводной коробке 23. К фундаменту станина крепится лапами 22. Для подъема двигателя при монтаже служат рымы 6.
Асинхронный двигатель с фазным ротором (250 кВт, 3000 об/мин, 50 Гц, защищенный продуваемый)
Ротор двигателя состоит из вала 26, на котором при помощи нажимных колец 24, шпонки 21 и разрезной шпонки 20 укреплены в запрессованном состоянии пакеты магнитопровода, набранные из кольцевых пластин 3 (см. рис. 2, а). Радиальные вентиляционные каналы между пакетами образуются дистанционными распорками, помещенными на каждом зубцовом делении.
Стержни 1 обмотки с заранее наложенной витковой изоляцией 2, 3 (см. рис. 4, б) вставляются в пазы с торцевой стороны магнитопровода. Предварительно в пазы вводится пазовая коробочка 4, играющая роль корпусной изоляции. Для укрепления стержней в радиальном направлении и усиления витковой и корпусной изоляции используются изоляционные прокладки 5—6. Центробежная сила, действующая на пазовую часть обмотки, воспринимается клиньями 7 из изоляционного материала.

Электрическое соединение вращающейся обмотки ротора с внешними (неподвижными) электрическими цепями производится при помощи контактных колец, на которые выведены обмотки, и щеточного устройства, связанного с неподвижными электрическими цепями. Контактные кольца выполняются как отдельный узел машины. Кольца 75, изготовленные из стали, отделяются друг от друга и от корпуса с помощью изоляционных прокладок 7 7. Все эти детали стягиваются вместе изолированными шпильками 16 и прифланцовываются к торцу вала. К кольцам плотно прижимаются щетки, электрически соединенные с токоподводящими шинами 72 щеточной траверсы (кроме этих шин на рис. 6 показаны болты 77 щеточной траверсы и ее изоляционные детали, а также корпус 73 и крышка 14; щетки и щеткодержатели не показаны).

Правильное расположение оси ротора по отношению к статору и возможность вращения ротора обеспечиваются с помощью таких же деталей, как в короткозамкнутом двигателе по рис. (подшипников качения, роликового 25 и шарикового /0, подшипниковых крышек 27 и подшипниковых щитов 31).
По способу охлаждения и защиты от воздействия внешней среды двигатель по рис. 6 имеет продуваемое каплезащищенное исполнение. Внутри машины воздух перемещается аксиально-радиально. Наружный воздух поступает в машину с двух сторон через отверстия в подшипниковых щитах 31 и направляется диффузорами 9 к вентиляционным лопастям 28, промежуткам между лобовыми частями стержней обмотки ротора и к аксиальным каналам в магнитопроводе ротора; далее воздух из аксиальных каналов попадает в радиальные каналы в магнитопроводе ротора и статора; воздух от вентиляционных лопастей 28 и лобовых частей ротора омывает лобовые части обмотки статора. Нагретый в машине воздух попадает в пространство между ярмом статора и корпусом станины, откуда он выбрасывается наружу через боковые отверстия в корпусе.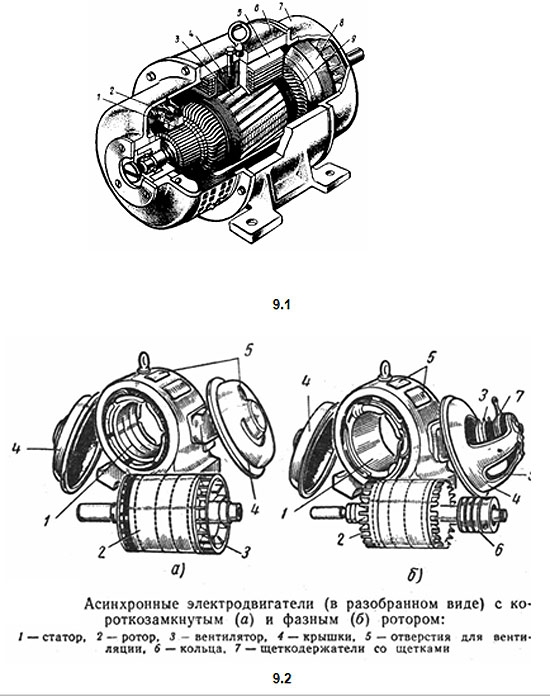
Система плавного пуска асинхронного двигателя с фазным ротором Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
УДК 621.313.333.1 Шрв://ёо1.огв/10.18503/2311-8318-2019-1(42)-24-29
Мещеряков В.Н., Бойков А.И., Ласточкин Д.В.
Липецкий государственный технический университет
Система плавного пуска асинхронного двигателя с фазным ротором
 В системе электропривода реализован плавный пуск асинхронного двигателя с фазным ротором с возможностью регулирования и поддержания постоянства пускового момента с обеспечением требуемого ускорения. Такую систему электропривода предложено использовать на конвейерах металлургических производств, зачастую не требующих регулирования скорости, но обеспечивающих пусковые режимы с заданным темпом разгона, в том числе и при полной загрузке конвейера. Система электропривода сочетает некоторые свойства асинхронного вентильного каскада и систем параметрического управления. Описана работа системы управления инвертором, реализующая стабилизацию тока ротора асинхронного электродвигателя за счет изменения частоты на выходе инвертора напряжения в функции выпрямленного тока ротора двигателя. Частотно-зависимое индуктивно-активное сопротивление, названное индукционным сопротивлением, содержит массивный магнитопровод с тремя трубчатыми стержнями, соединенными ярмом, на каждом из стержней размещена однослойная фазная обмотка.
В системе электропривода реализован плавный пуск асинхронного двигателя с фазным ротором с возможностью регулирования и поддержания постоянства пускового момента с обеспечением требуемого ускорения. Такую систему электропривода предложено использовать на конвейерах металлургических производств, зачастую не требующих регулирования скорости, но обеспечивающих пусковые режимы с заданным темпом разгона, в том числе и при полной загрузке конвейера. Система электропривода сочетает некоторые свойства асинхронного вентильного каскада и систем параметрического управления. Описана работа системы управления инвертором, реализующая стабилизацию тока ротора асинхронного электродвигателя за счет изменения частоты на выходе инвертора напряжения в функции выпрямленного тока ротора двигателя. Частотно-зависимое индуктивно-активное сопротивление, названное индукционным сопротивлением, содержит массивный магнитопровод с тремя трубчатыми стержнями, соединенными ярмом, на каждом из стержней размещена однослойная фазная обмотка. Толщина стенок трубчатых стержней не превышает глубины проникновения электромагнитного поля в массивный ферромагнитный материал. Приведены результаты экспериментальных исследований частотных характеристик индукционного сопротивления. Разработана математическая модель системы электропривода, проведено компьютерное моделирование динамических процессов с использованием пакета прикладных программ МАТЬАВ 81шиНпк. Доказана возможность реализации предложенного способа управления процессом пуска асинхронного двигателя со стабилизацией пускового момента.
Толщина стенок трубчатых стержней не превышает глубины проникновения электромагнитного поля в массивный ферромагнитный материал. Приведены результаты экспериментальных исследований частотных характеристик индукционного сопротивления. Разработана математическая модель системы электропривода, проведено компьютерное моделирование динамических процессов с использованием пакета прикладных программ МАТЬАВ 81шиНпк. Доказана возможность реализации предложенного способа управления процессом пуска асинхронного двигателя со стабилизацией пускового момента.Ключевые слова: асинхронный двигатель с фазным ротором, пусковой момент, выпрямитель, инвертор, фильтр, индукционное сопротивление.
Введение
На конвейерах металлургических производств, в том числе и на механизмах, не требующих регулирования скорости, достаточно широко применяются системы электропривода на базе асинхронного двигателя с фазным ротором (АДФР).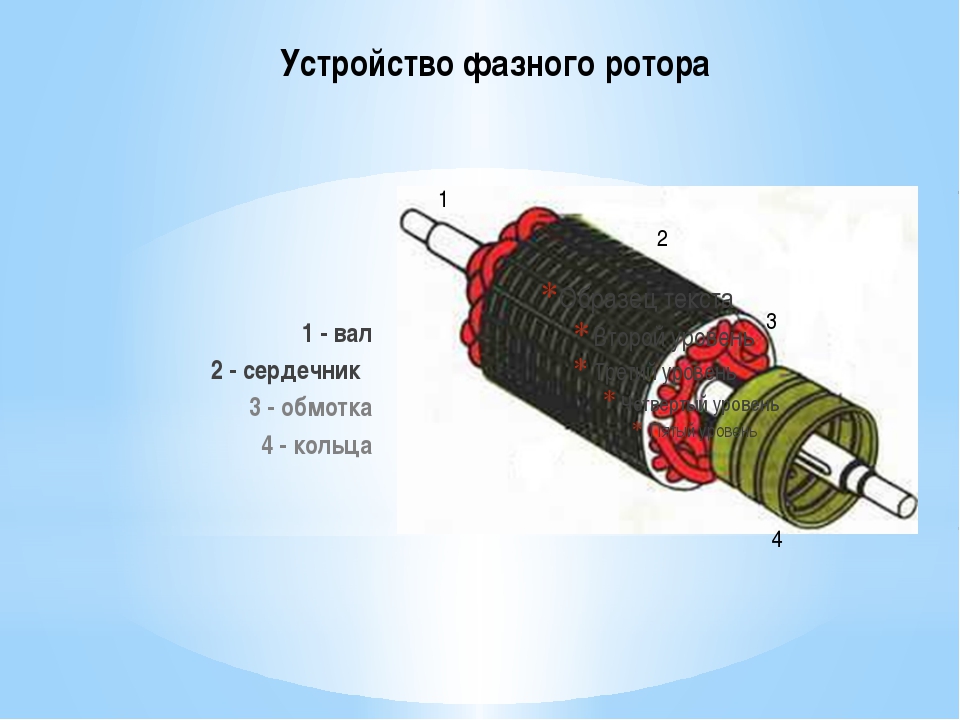 Это объясняется тяжелыми условиями пуска, поскольку электропривод должен обеспечить пуск нагруженного конвейера. Известные системы параметрического резисторного и импульсно-резисторного пуска АДФР обеспечивают ограничение пускового тока за счет рассеивания энергии скольжения на резисторных элементах, что определяет низкую энергоэффективность данных пусковых устройств [1-3].
Это объясняется тяжелыми условиями пуска, поскольку электропривод должен обеспечить пуск нагруженного конвейера. Известные системы параметрического резисторного и импульсно-резисторного пуска АДФР обеспечивают ограничение пускового тока за счет рассеивания энергии скольжения на резисторных элементах, что определяет низкую энергоэффективность данных пусковых устройств [1-3].
Наиболее экономичный способ ограничения тока ротора в АДФР, основанный на введении противоЭДС в цепь ротора, реализуется в системе асинхронного вентильного каскада (АВК), имеющего выпрямитель-но-инверторный блок, передающий энергию скольжения через согласующий трансформатор в трехфазную питающую сеть. Однако этот хорошо изученный способ управления АДФР обеспечивает приемлемые технико-экономические показатели электропривода только при небольшом (20-25%) диапазоне изменении скорости и не в состоянии обеспечить необходимые пусковые характеристики [4, 5]. Системы АВК с последовательным возбуждением не обеспечивают требуемую для механизмов конвейерного типа повышенную перегрузочную способность [6-8].
В разработанной системе электропривода предложено ограничивать ток ротора, используя выпрями-
© Мещеряков В.Н., Бойков А.И., Ласточкин Д.В., 2019
тельно-инверторный блок, содержащий конденсаторный фильтр в звене постоянного тока, полностью управляемый инвертор на базе ЮВТ-транзисторов с обратными диодами, к выходу которого подключено частотно-зависимое индукционное сопротивление [9].
Методы решения
Силовая часть электропривода (рис. 1) содержит асинхронный двигатель с фазным ротором (М), обмотка статора которого подключена к питающей сети, выводы обмоток ротора подключены к входу трехфазного нерегулируемого мостового выпрямителя (В). Выход нерегулируемого выпрямителя, к которому также подключен конденсатор (С), соединен с входом регулируемого трехфазного инвертора (И). В звено постоянного тока включен датчик тока (ДТ). К выходу инвертора подключен индукционный резистор (ИР). Выход датчика тока соединен с входом блока управления (БУ) частотой выходного тока инвертора.
В звено постоянного тока включен датчик тока (ДТ). К выходу инвертора подключен индукционный резистор (ИР). Выход датчика тока соединен с входом блока управления (БУ) частотой выходного тока инвертора.
Рис. 1. Силовая часть электропривода
Представленный на рис. 2 блок управления частотой выходного тока инвертора выполнен следующим образом: он содержит формирователь сигналов (Ф), имеющий количество выходных каналов, соответствующее количеству ключевых элементов инвертора, выход формирователя сигналов соединен с управляющим входом инвертора, вход формирователя сигналов соединен с выходом регулятора частоты (РЧ) переменного тока на выходе инвертора, вход которого соединен с выходом первого узла сравнения 1, положительный вход которого соединен с блоком задания максимальной частоты (БЗМЧ), а отрицательный вход первого узла сравнения 1 соединен с выходом блока ограничения (БО), вход которого соединен с выходом интегрального блока регулятора тока (И), вход которого соединен с выходом второго узла сравнения 2, положительный вход которого соединен с блоком задания выпрямленного тока (БЗТ), а отрицательный вход второго узла сравнения 2 соединен с выходом датчика тока. м _ 71 I
м _ 71 I
(2)
где 71 — модуль полного электрического сопротивления единичного квадрата поверхности магнитопрово-да; и — периметр стержня; м — число витков; — эквивалентная длина фазного магнитопровода.
71 =
©
У
(3)
где — магнитная проницаемость на поверхности магнитопровода; ю — круговая частота поля; у — удельная электрическая проводимость материала.
Активная и индуктивная составляющие определяются с помощью соотношений [15-17]:
г = 0,867м;
м » м~
х, = 0,537 .
м ‘ м
(4)
(5)
После открытия инвертора, по цепи, состоящей из обмотки ротора, нерегулируемого выпрямителя, датчика тока, регулируемого инвертора, индукционного резистора, начинает протекать ток. Одновременно происходит заряд фильтрующего конденсатора в звене постоянного тока. На рис. 4 показана зависимость изменения полного комплексного сопротивления ИР от частоты выходного тока инвертора.
4
200
400
600
/Гц
Рис. 4. Зависимость полного комплексного сопротивления ИР от частоты тока на выходе инвертора
Ток в выпрямленной цепи можно рассчитать по формуле
I, =
Е,р ЕАи
(6)
где Еаи — противоЭДС инвертора в выпрямленной цепи; ДиВЕ — суммарное падение напряжения на вентилях схемы; ЯЭкв — суммарное сопротивление, приведенное к цепи постоянного тока [18],
у. * * * * *
Язкв = Г2 + Хр + Хис0 + +
г = 2гр;
3хР *
п
X
3хис0 (///б ).
ис0
п
x.
п
2г»/7б,
(7)
(8)
(9) (10)
(11) (12)
где г2 — приведенное активное сопротивление ротора; х* — приведенное реактивное сопротивление ротора; Хисо — приведенное индуктивное сопротивление обмотки индукционного реостата; х* — приведенное индуктивное сопротивление магнитопровода индукционного реостата; г* — приведенное активное сопротивление магнитопровода индукционного реостата; / — текущая частота на выходе инвертора; / — максимальная частота на выходе инвертора.
ПротивоЭДС инвертора, в первом приближении, численно равна падению напряжения на индукционном сопротивлении:
Е
7 • к • I,,
ис сх а ‘
(13)
где 7ис — полное комплексное сопротивление ИР;
ксх — коэффициент приведения напряжения мостовой схемы к цепи постоянного тока.
При прохождении тока в выпрямленной цепи через
датчик тока, сигнал ист с датчика тока поступает на отрицательный вход второго узла сравнения 2, а от блока задания выпрямленного тока поступает сигнал
Изг на положительный вход узла сравнения 2. Сигнал
рассогласования АПТ = Изг — ист поступает на вход интегрального блока, который вырабатывает сигнал
желаемого изменения частоты
и
ИЧ
этот сигнал
ограничивается блоком ограничения.
При изменении скорости асинхронного двигателя в процессе пуска на первом узле сравнения 1 производится сравнение сигнала задания максимальной частоты иЗМч и сигнала желаемого изменения частоты иИч, определяется рассогласование Д ич = иЗМч — иИч. Блок ограничения сигнала Цич настраивают так, чтобы сигнал АЦч на входе блока регулятора частоты был всегда положительным. На рис. 5 показана зависимость тока в выпрямленной цепи от скольжения ротора АДФР, из
которой видно, что система управления инвертором обеспечивает его поддержание на заданном уровне.
7 —
5 —
1 —
и и а
\
/
1 :
0,2
0,4
0,6
0,8
1
Рис. 5. Зависимость тока в выпрямленной цепи от скольжения
По мере разгона асинхронного двигателя происходит уменьшение ЭДС ротора, поэтому для поддержания постоянства тока ротора необходимо уменьшать вводимую противоЭДС инвертора. Это достигается путем уменьшения частоты тока на выходе инвертора, вследствие чего уменьшается сопротивление магнитной системы индукционного резистора [12-17], влияющее на результирующий ток в цепи ротора. После достижения двигателем скорости, близкой к скорости на естественной механической характеристике, частота тока на выходе инвертора устанавливается минимальной или равной нулю, для этого открывают только два ключевых вентильных элемента — один в анодной, а другой в катодной, группах вентилей инвертора, и по двум фазным обмоткам индукционного реостата будет протекать постоянный ток. В этом случае добавочное сопротивление, введенное в цепь ротора асинхронного двигателя, будет минимальным. Необходимый темп уменьшения частоты на выходе инвертора в процессе пуска задают исходя из желаемого темпа разгона электропривода путем соответствующей настройки постоянной времени интегрального блока. Для получения пониженной скорости вращения асинхронного двигателя необходимо устанавливать соответствующую частоту тока на выходе инвертора. На рис. 6 показано изменение выходной частоты инвертора в зависимости от скольжения ротора асинхронного электродвигателя.
Была построена динамическая механическая характеристика (рис. 7), отображающая зависимость момента на валу электродвигателя от его скорости. Пуск электродвигателя производился под нагрузкой (Мгагр=МгаД). Видно, что разгон электродвигателя происходит при постоянном значении пускового момента.
f Гц
700 —
600 —
500 —
400 —
300 —
200 —
100 —
Рис. 6. Зависимость частоты выходного тока инвертора от скольжения
Рис. 7. Динамическая механическая характеристика
Результаты исследования
Для подтверждения изменения полного комплексного сопротивления индукционного реостата был проведен эксперимент. Схема экспериментальной установки соответствует схеме электропривода, приведенной на рис. 1, в которой в звено постоянного тока включен амперметр, частота на выходе инвертора измерялась с помощью частотометра.
В ходе эксперимента для различных значений выпрямленной ЭДС ротора АД с ФР с помощью системы управления инвертором задавалось такое значение ча-стоты выходного тока, чтобы ток, протекающий в выпрямленной цепи, оставался неизменен. Полученные в результате частотные характеристики индукционного резистора приведены на рис. 8.
Из рис. 8 видно, что полученные в результате эксперимента частотные зависимости имеют нелинейный характер.
120 ■
100 ■
80 ■
60 ■
40 ■
20 ■
¿Гц
0
1
-Г-
2
100 В
,90 В.
100 В
80 В
о
90 В
,70 в
80 В
о
70 В
100 В
90 в юо в
80 В 70 В
90 В 80 В
U А
Рис. 8. Экспериментальные частотные зависимости индукционного резистора
Заключение
Преимущество предлагаемого способа управления асинхронным двигателем с фазным ротором заключается в простоте реализации, т.к. регулируется только одна переменная — частота тока на выходе инвертора.
При построении замкнутого контура регулирования тока в выпрямленной цепи обеспечивается постоянство тока ротора и момента при пуске асинхронного двигателя.
В электроприводе возможно построение двухкон-турной системы управления с внешним контуром регулирования скорости двигателя, что позволит получить более качественные динамические характеристики.
Статья написана при поддержке гранта РФФИ №17-48-480492 р_а «Анализ, математическое моделирование и оптимизация управления электромеханическими системами с электроприводами переменного тока мехатронных устройств, манипуляторов и грузоподъемных механизмов».
список литературы
1. Браславский И.Я., Ишматов З.Ш., Поляков В.Н. Энергосберегающий асинхронный электропривод. М.: Академия, 2004. 256 с.
2. Jiang You, Minghao Liu, Jiarui Ma, Hongjie Jia Modeling and Analyse of Induction Motor Drive System with Consideration of DC Bus Stabilization and Control Performance // 8th International Power Electronics and Motion Control Conference. 2016. Pp. 1362-1368.
3. Dargad R., Dubey G. Control of Induction Motor Using of Saturistor with High Eddy Current Loss // Journal-EL. 1975. Vol.56. №10. Pp. 51-56.
4. Онищенко Г.Б., Локтева И.Л. Асинхронно вентильные каскады и двигатели двойного питания. М.: Энергия, 1979. 200 с.
5. Асинхронно-вентильный крановый электропривод / Хватов С.В., Грязнов В.И., Крюков О.В., Федоров О.В. // Электродвигатели переменного тока подъёмно-транспортных механизмов. Суздаль: ВНИПТИЭМ, 1988. С. 46-48.
6. Шулаков Н.В., Медведев Е.Н. Асинхронный вентильный каскад с последовательным возбуждением двигателя // Изв. вузов. Электромеханика. 1988. С. 47-54.
0
7. Мещеряков В.Н., Федоров В.В. Асинхронно-вентильный каскад с инвертором в цепи статора и общим звеном постоянного тока // Электротехника. 1998. № 6. С. 47-50.
8. Hengameh Kojooyan-Jafari, Lluirs Monjo, Felipe Corrcoles, Joaquirn Pedra Parameter Estimation of Wound-Rotor Induction Motors From Transient Measurements // IEEE Transactions on Energy Conversion. 2014. V. 10. №2. Pp. 300-308.
9. Пат. 2661343 Российская Федерация, МПК Н02Р 7/63. Способ управления асинхронным двигателем с фазным ротором / Мещеряков В.Н., Бойков А.И., Ласточкин Д.В.; заявитель ФГБОУ ВО «Липецкий государственный технический университет». Опубл. 17.07.2018.
10. Плеханов М.С. Модель асинхронного электродвигателя с массивным ферромагнитным ротором в режиме минимального скольжения // Сборник научных трудов IV Всероссийского молодежного Форума с международным участием: Инженерия для освоения космоса. Томск: Национальный исследовательский Томский политехнический университет, 2016. С. 66-70.
11. Муравьев A.A., Бойков А.И. Системы управления асинхронной машиной с фазным ротором с вентильными преобразователями в цепи ротора // Материалы XII междуна-
Information in English
родной научно-практической конференции: Современные сложные системы управления. Липецк: Липецкий госу-дарственныйтехнический университет, 2017. С. 159-163.
12. Нейман Л.Р. Поверхностный эффект в ферромагнитных телах. М.;Л.: Госэнергоиздат, 1949. 190 с.
13. Власов В.Г. Экспериментальные исследования и методика расчета асинхронных двигателей с индукционным сопротивлением в цепи ротора // Электротехническая промышл. Сер. Электропривод. 1967. №293. C. 3-6.
14. Nanda J., Mathew M. Constant starting torque of induction motor Impedance Control-A Novel Approach // Institution of Engineers of India Journal. 1979. Vol. 59, №5. Pp. 278-283.
15. Воскобойников Б. А. Применение индукционных реостатов для крановых электроприводов // Пром. энергетика. 1976. №11. C. 25-28.
16. Шумков Е.Б., Епифанов В.П., Завьялов Н.С. Энергетические особенности электроприводов с индукционными реостатами // Промышленная энергетика. 1979. №1. С. 26-28.
17. Pat. №1577863 UK, INT. Cl. H O3F 9/O4. Saturable reactors / Logan R. 1988.
18. Мещеряков B.H., Морозов С.В., Теличко Л.Я. Расчет параметров индукционных сопротивлений для асинхронных двигателей с фазным ротором // Изв. вузов. Электромеханика. 1989. № 3. С. 50-52.
Поступила в редакцию 09 января 2019 г.
System of Soft Start for Induction Motor with Phase Rotor
Victor N. Meshcheryakov
D.Sc. (Engineering), Professor, Head of the Department of Electric Drive, Faculty of Automation and Computer Science, Lipetsk State Technical University, Lipetsk, Russia. E-mail: [email protected]. 0RCID:https://orcid.org/0000-0003-0984-5133.
Andrey I. Boikov
Assistant, Department of Electric Drive, Faculty of Automation and Computer Science, Lipetsk State Technical University, Lipetsk, Russia. E-mail: [email protected]. ORCID: https://orcid.org/0000-0002-0032-0683.
Denis V. Lastochkin
Postgraduate Student, Department of Electric Drive, Faculty University, Lipetsk, Russia. E-mail: [email protected].
In the electric drive designed on the basis of an asynchronous motor with a phase rotor it is proposed to regulate the rotor current using the rectifier-inverter unit. The input of the rectifier is connected to the terminals of the rotor winding of the motor and the output of the inverter performed on the basis of IGBT-transistors with reverse diodes is connected to the frequency-dependent inductive-active resistance. A capacitive filter is included in the DC link. In the electric drive system, the installed soft-start of the asynchronous motor with a phase rotor is implemented with the possibility of regulating and maintaining the constancy of the starting torque to ensure the required acceleration. It is proposed to use such an electric drive system on conveyors of metallurgical production, which often do not require speed control, but providing starting modes with a predetermined rate of acceleration including when the conveyor is fully loaded. The electric drive system combines some properties of asynchronous valve cascade and parametric control systems. The operation of the inverter control system is described, it implements stabilization of the rotor current of an induction motor by changing the frequency at the output of the voltage inverter as a function of the rectified current of the motor rotor. Frequency-dependent inductive-active resistance, referred to as induction resistance, contains a massive magnetic core with three
Automation and Computer Science, Lipetsk State Technical
tubular rods connected by a yoke and each rod has a single-layer phase winding. The wall thickness of the tubular rods does not exceed the depth of penetration of the electromagnetic field into the massive ferromagnetic material. The results of experimental studies of the frequency characteristics of the induction resistance are presented. The mathematical model of the electric drive system is developed, computer simulation of dynamic processes is carried out using the MATLAB Simulink application software package. The possibility of implementing the proposed method of controlling the process of starting an induction motor with the stabilization of the starting torque has been proven.
Keywords: induction motor with phase rotor, starting torque, rectifier, inverter, filter, induction resistance.
References
1. Braslavskij I.Ja., Ishmatov Z.Sh., Poljakov V.N. Energos-beregajushhij asinhronnyj elektroprivod [Energy-saving asynchronous electric drive]. Moscow, Akademija Publ., 2004, 256 p. (In Russian)
2. Jiang You, Minghao Liu, Jiarui Ma, Hongjie Jia Modeling and Analyse of Induction Motor Drive System with Consideration of DC Bus Stabilization and Control Performance. 8th Inter-national Power Electronics and Motion Control
Conference, 2016, pp. 1362-1368.
3. Dargad R., Dubey G. Control of Induction Motor Using of Saturistor with High Eddy Current Loss. Journal-EL, 1975, no. 10 (56), pp. 51-56.
4. Onischenko G.B., Lokteva I.L. Asinhronno ventilnyie kaskadyi i dvigateli dvoynogo pitaniya [Asynchronously valve stages and dual power motors]. Moscow, Energiya Publ., 1979. 200 pp. (In Russian)
5. Hvatov S.V., Grjaznov V.I., Krjukov O.V., Fedorov O.V. Asynchronous valve crane electric drive. Elektrodvigateli peremennogo toka podjomno-transportnyh mehanizmov [Electric motors of alternating current of lifting and transport mechanisms], 1988, pp. 46-48. (In Russian)
6. Shulakov N.V., Medvedev E.N. Asynchronous valve cascade with sequential excitation of the motor. Izvestija vuzov. Elektromehanika [Proceedings of the universities. Electrical engineering], 1988, pp. 47-54. (In Russian)
7. Meshherjakov V.N., Fedorov V.V. Asynchronously-valve cascade with the inverter in the stator circuit and a common DC link. Elektrotehnika [Electrical engineering], 1998, no. 6, pp. 47-50. (in Russian)
8. Hengameh Kojooyan-Jafari, Lluirs Monjo, Felipe Coircoles, Joaquirn Pedra Parameter Estimation of Wound-Rotor Induction Motors From Transient Measurements. IEEE Transactions on Energy Conversion, 2014, no. 2(10), pp. 300-308.
9. Meshherjakov V.N., Bojkov A.I., Lastochkin D.V. Sposob upravlenija asinhronnym dvigatelem s faznym rotorom [Method of control of asynchronous motor with phase rotor], Patent RF, no. 2661343, 2018.
10. Plehanov M.S. Model of induction motor with massive ferromagnetic rotor in the minimum slip mode. Sbornik nauch-nyh trudov IV Vstrossijskogo molodezhnogo Foruma s mezhdunarodnym uchastiem: Inzhenerija dlja osvoenija
Мещеряков В.Н., Бойков А.И., Ласточкин Д.В. Система плавного пуска асинхронного двигателя с фазным ротором // Электротехнические системы и комплексы. 2019. № 1(42). С. 24-29. https://doi.org/10.18503/2311-8318-2019-1(42)-24-29
kosmosa. [Collection of scientific works of the IV all-Russian youth Forum with international participation: Engineering for space exploration], 2016, pp. 66-70. (in Russian)
11. Muravyev A. A., Boikov A.I. Control systems of an asynchronous machine with a phase rotor with valve converters in the rotor circuit. Materialyi XII mezhdunarodnoy nauch-no-prakticheskoy konferentsii: Sovremennyie slozhnyie sis-temyi upravleniya [Proceedings of the XII international scientific and practical conference: HTCS 17], 2017, pp. 159-163. (In Russian)
12. Nejman L.R. Poverhnostnyj jeffekt v ferromagnitnyh telah [Surface effect in ferromagnetic bodies]. Moscow; Leningrad, Gosjenergoizdat Publ., 1949, 190 p. (In Russian)
13. Vlasov V.G. Experimental studies and methods of calculation of induction motors with induction resistance in the rotor circuit. Elektrotehnicheskaja promyshl. ser. elektroprivod [Electrical industry. Series: Electric Drive], 1967, no. 293, pp. 3-6. (In Russian)
14. Nanda J., Mathew M. Constant starting torque of induction motor Impedance Control-A Novel Approach. Institution of Engineers of India Journal, 1979, no. 5 (59), pp. 278-283.
15. Voskobojnikov B.A. The application of induction resistors for crane electric drives. Promyshlennaja jenergetika [Industrial power engineering], 1976, no. 11, pp. 25-28. (In Russian)
16. Shumkov E.B., Epifanov V.P., Zavjalov N.S. Energy features of electric drives with induction resistances. Promyshlennaja jenergetika [Industrial power engineering], 1979, no.1, pp. 26-28. (In Russian)
17. Logan R. Saturable reactors. Patent UK, no. 1577863, 1988.
18. Mescheryakov V.N., Morozov S.V., Telichko L.Ya. Calculation of parameters of induction of resistance to asynchronous motors with wound rotor. Izestija vuzov SSSR [Proceedings of Universities of the USSR], 1989, no. 3, pp. 50-52. (In Russian)
Meshcheryakov V.N., Boikov A.I., Lastochkin D.V. System of Soft Start for Induction Motor with Phase Rotor. Elektrotekhnicheskie sistemy i kompleksy [Electrotechnical Systems and Complexes], 2019, no. 1(42), pp. 24-29. (In Russian). https://doi.org/10.18503/2311-8318-2019-1(42)-24-29
Привод лифтов от асинхронного электродвигателя с фазным ротором
Категория:
Монтаж и эксплуатация лифтов
Публикация:
Привод лифтов от асинхронного электродвигателя с фазным ротором
Читать далее:
Привод лифтов от асинхронного электродвигателя с фазным ротором
Асинхронный электродвигатель с фазным ротором (рис. 54) отличается от двигателя с короткозамкнутым ротором тем, что его роторные обмотки делают трехфазными. Концы обмоток выводят на контактные кольца на валу ротора. На статоре двигателя укреплены три щетки, прижимаемые к кольцам пружинами. Через щетки и кольца роторные обмотки присоединяют к роторным пусковым резисторам, расположенным вне двигателя.
Введение дополнительных (пусковых) резисторов изменяет механическую характеристику асинхронного двигателя. На рис. 55, а показаны механические характеристики двигателя при различных сопротивлениях резисторов, введенных в цепь ротора. Характеристика ЗУ показывает зависимость движущего момента М двигателя от частоты вращения ротора п при полностью выведенных резисторах из цепи ротора. Характеристика ЗУ присуща двигателю при включенном контакторе ЗУ (см. следующий рисунок). Она называется естественной характеристикой двигателя.
При введении резисторов в цепь ротора (характеристики 1У, 2У и В/Н) движущий момент двигателя при малых скоростях увеличивается, а ток в обмотках ротора и статора уменьшается. Поэтому роторные резисторы вводят в основном для уменьшения токов при разгоне двигателя. Пусковые резисторы подключают к обмоткам ротора по схеме в звезду.
Рекламные предложения на основе ваших интересов:
Схема электропривода лифта от асинхронного двигателя с фазным ротором показана на рис. 55, б. При неподвижной кабине как статорные контакторы В и Я, так и роторные контакторы 1У, 2У и ЗУ отключены и поэтому в цепь ротора введены все резисторы. Разгон двигателя (кабины) начинается после включения контактора В, причем движущий момент двигателя изменяется по характеристике В/Н.
Рис. 54. Асинхронный электродвигатель с фазным ротором:
1 — контактные кольца, 2 — щетки
Рис. 55. Асинхронный двигатель с фазным ротором:
а — механические характеристики, б — схема электропривода лифта
Таким образом, лифт с приводом от асинхронного двигателя с фазным ротором тормозят (как и в случае привода от асинхронного короткозамк-нутого двигателя) при номинальной рабочей скорости кабины. Поэтому точность остановки кабины с этим приводом получается такой же, как и в случае привода от асинхронного короткозамк-нутого двигателя.
Двигатель с фазным ротором отличается от асинхронного двигателя с короткозамкнутым ротором более сложной конструкцией. Привод от такого двигателя сложнее привода с короткозамкнутым двигателем из-за использования роторных резисторов и контакторов. Двигатели с фазным ротором в лифтах применяют реже, чем короткозамкнутые двигатели. Электропривод от двигателя с фазным ротором используют только в случае ограниченной мощности трансформаторной подстанции, от которой лифтовая установка получает электроэнергию. При пуске двигатель с фазным ротором потребляет из сети меньшую мощность, чем двигатель с короткозамкнутым ротором.
Рекламные предложения:
Читать далее: Привод лифтов от двухскоростного короткозамкнутого асинхронного двигателя
Категория: — Монтаж и эксплуатация лифтов
Главная → Справочник → Статьи → Форум
Асинхронный двигатель. Принцип работы. — Help for engineer
Асинхронный двигатель. Принцип работы.
Асинхронный двигатель – это асинхронная электрическая машина переменного тока в двигательном режиме, у которой частота вращения магнитного поля статора больше чем частота вращения ротора.
Принцип работы берет основу из создания вращающегося магнитного поля статора, о чем подробнее вы можете почитать из указанной ссылки.
Асинхронные двигатели – одни из самых распространённых электрическим машин, и зачастую являются одним из основных преобразователей электрической энергии в механическую энергию. Самым большим достоинством является отсутствие контакта между подвижными и подвижными частями ротора, я имею ввиду электрический контакт, к примеру, в двигателях постоянного тока через щетки и коллектор. Однако это справедливо только к АД с короткозамкнутым ротором, в асинхронных двигателях с фазным ротором, этот контакт имеет место, но об этом чуть позже.
Конструкция асинхронного двигателя.
Рассмотрим конструкцию, примером послужит асинхронный двигатель с короткозамкнутым ротором, но так же существует фазный тип ротора. Асинхронный двигатель состоит из статора и ротора между которыми воздушный зазор. Статор и ротор в свою очередь еще имеют так называемые активные части – обмотка возбуждения (отдельно статорная и отдельно роторная) и магнитопровод (сердечник). Все остальные детали АД, такие как: вал, подшипники, вентилятор, корпус, и т.п. – чисто конструктивные детали, обеспечивающие защиту от окружающей среды, прочность, охлаждение, возможность совершать вращение.
Рисунок 1 – Конструкция асинхронного двигателя.
Статор представляет собой трёх (или много)-фазную обмотку, проводники которой равномерно уложены в пазах по всей окружности, с угловым расстоянием в 120 эл. градусов. Концы обмотки статора обычно соединяют по схемам «звезда» или «треугольник», и подключаются к сети питающего напряжения. Магнитопровод выполняется из электротехнической шихтованной (набрано из тонких листов) стали.
Как я уже сказал ранее, в асинхронном двигателе существует всего 2 типа роторов: это фазный тип ротора, и короткозамкнутый. Магнитопровод ротора также выполнен из шихтованной электротехнической стали. Короткозамкнутый ротор имеет вид так называемой «беличьей клетки» из-за схожести своей конструкции на эту клетку. Состоит эта клетка из медных стержней, которые накоротко замкнуты кольцами. Стержни непосредственно вставлены в пазы сердечника ротора. Для улучшения пусковых характеристики АД с таким типом ротора, применяют специальную форму паза, это дает возможность использования эффекта вытеснения тока, что влияет на увеличение активного сопротивления роторной обмотки при пуске (больших скольжения). Сами по себе, АД с короткозамкнутым ротором имеют малый пусковой момент, что пагубно сказывается на области их использования. Наибольшее распространение они нашли в системах которые не требуют больших пусковых моментов. Однако, данный тип ротора отличается тем, что на его обслуживание тратится меньше средств чем на обслуживание двигателя с фазным ротором, вследствие отсутствия физического контакта в типе ротора беличья клетка.
Рисунок 2 – Ротор АД «беличья клетка»
Фазный ротор состоит из трёхфазной обмотки, зачастую соединенной по схеме «звезда», и выведенную на контактные кольца, которые вращаются вместе с валом. Щетки выполнены из графита. Фазный ротор дает много преимуществ, таких как пуск звезда-треугольник, регулирование частоты вращения изменением сопротивления ротора.
Режимы работы
Подробнее рассмотреть механическую характеристику в моей ранней статье, а так же способы пуска с реверсом.
К тормозным режимам стоит отнести несколько основных:
– торможение противовключением;
– торможение однофазным переменным током и конденсаторное торможение;
– динамическое торможение.
Асинхронный двигатель имеет низкую стоимость, надёжен, и очень дешевый в обслуживании, особенно если он выполнен с короткозамкнутым ротором.
Недостаточно прав для комментирования
Пуск электродвигателя с фазным ротором
Пусковые свойства асинхронного двигателя зависят от особенностей его конструкции, в частности от устройства ротора.
Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины.
При пуске асинхронного двигателя имеет место повышенное потребление электрической энергии из питающей сети, затрачиваемое не только на преодоление приложенного к валу тормозного момента и покрытие потерь в самой асинхронном двигателе, но и на сообщение движущимся звеньям производственного агрегата определенной кинетической энергии. Поэтому при пуске асинхронный двигатель должен развить повышенный вращающий момент.
Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению sп= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.
Рис. 1. Пуск трехфазного асинхронного двигателя с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного двигателя с замкнутыми накоротко контактными кольцами, начальный пусковой момент Мп1 = (0,5 -1,0) Мном, а начальный пусковой ток Iп = (4,5 — 7) Iном и более.
Малый начальный пусковой момент асинхронного электродвигателя с фазным ротором может оказаться недостаточным для приведения в действие производственного агрегата и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения. Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов.
Введение в цепь ротора двигателя регулируемых резисторов, называемых пусковыми, не только снижает начальный пусковой ток, но одновременно увеличивает начальный пусковой момент, который может достигнуть максимального момента Mmax (рис. 1, а, кривая 3), если критическое скольжение двигателя с фазным роторомsкр = (R2′ + Rд’) / (Х1 + Х2′) = 1,
где Rд’ — активное сопротивление резистора, находящегося в фазе обмотки ротора двигателя, приведенное к фазе обмотки статора. Дальнейшее увеличение активного сопротивления пускового резистора нецелесообразно, так как оно приводит к ослаблению начального пускового момента и выходу точки максимального момента в область скольжения s > 1, что исключает возможность разгона ротора.
Необходимое активное сопротивление резисторов для пуска двигателя с фазным ротором определяют, исходя из требований пуска, который может быть легким, когда Мп = (0,1 — 0,4) Mном, нормальным, если Мп — (0,5 — 0,75) Мном, и тяжелым при Мп ≥ Мном.
Для поддержания достаточно большого вращающего момента двигателем с фазным ротором в процессе разгона производственного агрегата с целью сокращения длительности переходного процесса и снижения нагрева двигателя необходимо постепенно уменьшать активное сопротивление пусковых резисторов. Допустимое изменение момента в процессе разгона M(t) определяется электрическими и механическими условиями, лимитирующими пиковый предел момента М > 0,85Ммах, момент переключения М2 > > Мс (рис. 2), а также ускорение.
Рис. 2. Пусковые характеристики трехфазного асинхронного двигателя с фазным роторомПереключение пусковых резисторов обеспечено поочередным включением контакторов ускорения Y1, Y2 соответственно в моменты времени t1, t2 отсчитываемые с момента пуска двигателя, когда в процессе разгона вращающий момент М становится равным моменту переключения М2. Благодаря этому на протяжении всего пуска все пиковые моменты получаются одинаковыми и все моменты переключения равны между собой.
Поскольку вращающий момент и ток асинхронного двигателя с фазным ротором взаимно связаны, то можно при разгоне ротора установить пиковый предел тока I1 = (1,5 — 2,5) Iном и ток переключения I2, который должен обеспечить момент переключения М2 > Мc.
Отключение асинхронных двигателей с фазным ротором от питающей сети всегда выполняют при цепи ротора, замкнутой накоротко, во избежание появления перенапряжений в фазах обмотки статора, которые могут превысить номинальное напряжение этих фаз в 3 — 4 раза, если цепь ротора в момент отключения двигателя окажется разомкнутой.
фазный ротор, электродвигатель
Всего комментариев: 0
Как работает трехфазный асинхронный двигатель
Эта статья и видео будут посвящены основам трехфазного асинхронного двигателя переменного тока, одного из наиболее распространенных на сегодняшний день типов промышленных электродвигателей. Этот обзор объяснит, что такое трехфазная мощность, как работает закон Фарадея, поймет основные компоненты асинхронного двигателя и влияние количества полюсов статора на номинальную скорость и крутящий момент двигателя.
Вы также можете посмотреть видео ниже с обзором трехфазных асинхронных двигателей переменного тока.
Что такое трехфазное питание?
Первое, что нам нужно понять о трехфазном асинхронном двигателе, — это первая часть его названия — трехфазная мощность. Однофазный источник питания использует два провода для обеспечения синусоидального напряжения. В трехфазной системе используются три провода для обеспечения одинакового синусоидального напряжения, но каждая фаза сдвинута на 120 °. В любой момент времени, если вы сложите напряжение каждой фазы, сумма будет постоянной.Однофазное питание подходит для жилых домов или других приложений с низким энергопотреблением, но трехфазное питание [JS2] обычно требуется для промышленных приложений или приложений с более высокой мощностью. Это потому, что он может передавать в три раза больше мощности, используя только в 1,5 раза больше проводов. Это делает энергоснабжение более эффективным и экономичным.
Что такое закон Фарадея?
Другой принцип, лежащий в основе асинхронных двигателей переменного тока, исходит из закона Фарадея. Британский ученый Майкл Фарадей обнаружил, что изменяющееся магнитное поле может индуцировать ток и, наоборот, ток может индуцировать магнитное поле.Используя правило правой руки, вы можете предсказать направление магнитного поля. Для этого представьте, что вы хватаете прямой провод большим пальцем, направленным в направлении тока. Ваши пальцы будут сгибаться в направлении линий магнитного потока.
Майк сжимает маркер, чтобы продемонстрировать правило правой руки Компоненты асинхронного двигателя
Асинхронный двигатель состоит из двух основных компонентов: статора и ротора.Статор состоит из внешних обмоток или магнитов и неподвижен. Статор неподвижен. Ротор — это внутреннее ядро, которое фактически вращается в двигателе. Ротор вращается.
Трехфазный асинхронный двигатель — ротор внутри статораБеличья конструкция является наиболее распространенным типом асинхронных двигателей, поскольку они самозапускаются, надежны и экономичны. В этой конструкции ротор похож на колесо для хомяка или «беличью клетку», отсюда и название. Ротор состоит из внешнего цилиндра из металлических стержней, закороченных на концах.Внутренняя часть состоит из шахты и прочного сердечника, сделанного из стальных пластин.
Как это работаетДля достижения крутящего момента на валу двигателя через статор подается ток. Это создает вращающееся магнитное поле, которое, в свою очередь, индуцирует ток в роторе. Из-за этого индуцированного тока ротор также создает магнитное поле и начинает следовать за статором из-за магнитного притяжения. Ротор будет вращаться медленнее, чем поле статора, и это называется «скольжением».’Если бы ротор вращался с той же скоростью, что и статор, не было бы индуцированного тока, следовательно, никакого крутящего момента. Разница в скорости колеблется в пределах 0,5-5% в зависимости от обмотки двигателя.
Обмотки и полюса
Трехфазные двигатели доступны в конфигурациях с 2, 4, 6, 8 и более полюсами. Количество полюсов в обмотках определяет идеальную скорость двигателя. Двигатель с большим числом полюсов будет иметь меньшую номинальную скорость, но более высокий номинальный крутящий момент.Из-за этого двигатели с высоким полюсом иногда называют моментными двигателями и могут использоваться для замены двигателя с редуктором. Идеальное соотношение между числом полюсов, частотой и скоростью определяется следующим:
Взаимосвязь между количеством полюсов и частотой вращения асинхронного двигателя. Заключение 3-фазные асинхронные двигатели переменного токасостоят из статора и ротора. Во время работы через статор пропускается ток, который индуцирует магнитное поле и приводит к вращению ротора.Скорость вращения вала и приложенный крутящий момент зависят от рабочей частоты и количества пар полюсов в обмотках двигателя. Если вас интересует наша линейка асинхронных двигателей, мотор-редукторов или даже серводвигателей, свяжитесь с инженером KEB, заполнив контактную форму ниже.
Трехфазный асинхронный двигатель с фазным ротором
ЦЕЛИ
• перечислить основные компоненты многофазного асинхронного двигателя с фазным ротором.
• Опишите, как развивается синхронная скорость в этом типе двигателя.
• Опишите, как регулятор скорости подключен к щеткам двигателя. обеспечивает регулируемый диапазон скорости двигателя.
• указать, как крутящий момент, регулирование скорости и эффективность работы на двигатель влияет регулятор скорости.
• продемонстрировать, как изменить направление вращения ротора с фазной фазой Индукционный двигатель.
До последних нескольких лет регулирование скорости переменного тока было очень трудным. со штатным мотором.Поэтому другой тип мотора и управления Система разрабатывалась и широко использовалась в течение многих лет. Электрики по обслуживанию должен быть знаком с этим типом двигателя и системы управления.
Для многих промышленных двигателей требуются трехфазные двигатели с регулируемой контроль скорости. Асинхронный двигатель с короткозамкнутым ротором нельзя использовать для переменного скорость работы, поскольку ее скорость по существу постоянна. Другой тип индукции Двигатель был разработан для приложений с регулируемой скоростью.Этот мотор называется асинхронный двигатель с фазным ротором или электродвигатель переменного тока с фазным ротором.
КОНСТРУКТИВНЫЕ ДЕТАЛИ
Трехфазный асинхронный двигатель с фазным ротором состоит из сердечника статора с трехфазная обмотка, намотанный ротор с контактными кольцами, щетками и щеткой держатели и два торцевых щита для размещения подшипников, поддерживающих ротор вал.
рис. 1, 2, 3 и 4 показывают основные части трехфазного, Асинхронный двигатель с фазным ротором.
ил. 1 Детали двигателя с фазным ротором
ил. 2 Обмотка статора многофазного асинхронного двигателя
ил. 3 Ротор с обмоткой для многофазного асинхронного двигателя
ил. 4 Подшипник скольжения, многофазный асинхронный двигатель с фазным ротором (General Electric Company)
Статор
Типичный статор содержит трехфазную обмотку, удерживаемую в пазах. многослойного стального сердечника, рисунок 2.Обмотка состоит из формованных катушки расположены и соединены таким образом, что получается три однофазных обмотки разнесены на 120 электрических градусов. Отдельные однофазные обмотки подключаются по схеме звезды или треугольника. Выводятся три линейных вывода к клеммной коробке, установленной на раме двигателя. Это та же конструкция как статор двигателя с короткозамкнутым ротором.
Ротор
Ротор состоит из цилиндрического сердечника, состоящего из стальных пластин.Прорези, вырезанные в цилиндрическом сердечнике, удерживают сформированные катушки проволоки для обмотка ротора.
Обмотка ротора состоит из трех однофазных обмоток, разнесенных на 120 эл. градусы друг от друга. Однофазные обмотки соединяются звездой или звездой. дельта. (Обмотка ротора должна иметь такое же количество полюсов, что и статор обмотки.) Три вывода от трехфазной обмотки ротора заканчиваются на трех контактных кольцах, установленных на валу ротора. Выводы от угольных щеток которые ездят на этих контактных кольцах, подключены к внешнему регулятору скорости для изменения сопротивления ротора для регулирования скорости.
Щетки надежно прикреплены к контактным кольцам намотанного ротора с помощью регулируемые пружины, установленные в щеткодержателях. Щеткодержатели бывают фиксируется в одном положении. Для этого типа двигателя нет необходимости переключать положение щетки, которое иногда требуется при работе с генератором постоянного тока и электродвигателем.
Корпус двигателя
Корпус двигателя изготовлен из литой стали. Сердечник статора прижимается напрямую в кадр.К стальной литой раме прикручены два торцевых щита. Один одного из торцевых щитов больше другого, потому что он должен вмещать щетку держатели и щетки, которые скользят по контактным кольцам намотанного ротора. В Кроме того, он часто содержит съемные смотровые лючки.
Подшипниковый узел такой же, как и в индукционной короткозамкнутой клетке. моторы. В конце используются либо подшипники скольжения, либо шарикоподшипники. щиты.
ПРИНЦИП ДЕЙСТВИЯ
Когда три тока, разнесенные на 120 электрических градусов, проходят через три однофазные обмотки в пазах сердечника статора, вращающийся магнитный месторождение разрабатывается.Это поле движется вокруг статора. Скорость вращающееся поле зависит от количества полюсов статора и частоты источника питания. Эта скорость называется синхронной скоростью. это определяется по формуле, которая использовалась для нахождения синхронного скорость вращающегося поля асинхронных двигателей с короткозамкнутым ротором.
Синхронная скорость в об / мин = [120 x частота в герцах / количество полюсов] или S = 120 x F / P
S = 120 x f / P
Поскольку вращающееся поле движется с синхронной скоростью, оно отсекает трехфазное обмотка ротора и индуцирует в этой обмотке напряжение.Обмотка ротора соединяется с тремя контактными кольцами, установленными на валу ротора. Кисти скользящие кольца соединяются с внешней группой соединенных звездой резисторы (регулятор скорости), рисунок 5. Наведенные напряжения в обмотки ротора создают токи, которые идут от ротора по замкнутому пути обмотка на регулятор скорости, соединенный звездой. Токи ротора создают магнитное поле в сердечнике ротора, основанное на действии трансформатора. Этот ротор поле реагирует с полем статора, создавая крутящий момент, который вызывает ротор повернуть.Регулятор скорости иногда называют вторичным сопротивлением. контроль.
Пусковая теория асинхронных двигателей с фазным ротором
Для запуска двигателя все сопротивление регулятора скорости, соединенного звездой. вставлен в цепь ротора. Цепь статора запитана от трехфазная линия. Наведенное в роторе напряжение вызывает токи в контуре ротора. Однако токи ротора ограничены по величине. сопротивлением регулятора скорости.В результате ток статора также имеет ограниченную стоимость. Другими словами, чтобы минимизировать пусковой выброс тока к асинхронному двигателю с ротором, вставьте полное сопротивление регулятора скорости в цепи ротора. На пусковой крутящий момент влияет сопротивлением, введенным во вторичную обмотку ротора. С сопротивлением в вторичный, коэффициент мощности ротора высокий или близок к единице. Этот означает, что ток ротора почти совпадает по фазе с индуцированным ротором Напряжение.Если ток ротора находится в фазе с напряжением, индуцированным ротором, тогда магнитные полюса ротора производятся одновременно с полюса статора. Это создает сильный магнитный эффект, который создает сильный пусковой момент. По мере ускорения двигателя ступени сопротивления в соединении звездой регулятор скорости может быть отключен от цепи ротора до тех пор, пока двигатель не разгонится к его номинальной скорости.
ил. 5 Соединения для асинхронного двигателя с фазным ротором и регулятора скорости
Контроль скорости
Добавление сопротивления в цепь ротора не только ограничивает запуск скачок тока, но также обеспечивает высокий пусковой крутящий момент и обеспечивает средство регулировки скорости.Если полное сопротивление регулятора скорости вставляется в цепь ротора, когда двигатель работает, ротор ток уменьшается, и двигатель замедляется. По мере уменьшения скорости ротора в обмотках ротора индуцируется большее напряжение и увеличивается ток ротора. разработан для создания необходимого крутящего момента на пониженной скорости.
Если в цепи ротора убрать все сопротивление, ток и скорость двигателя увеличатся. Однако скорость ротора всегда будет быть меньше синхронной скорости поля, создаваемого статором обмотки.Напомним, что этот факт справедлив и для индукции с короткой клеткой. мотор. Скорость двигателя с фазным ротором можно регулировать вручную или автоматически. с реле времени, контакторами и кнопкой выбора скорости.
ил. 6 Рабочие характеристики двигателя с фазным ротором.
Характеристики крутящего момента
Когда к двигателю прилагается нагрузка, увеличивается как процентное скольжение ротора, так и крутящий момент, развиваемый в роторе. Как показано на графике в На рисунке 6 соотношение между крутящим моментом и процентом скольжения практически прямая линия.
илл. 6 показывает, что характеристики крутящего момента индукции с фазным ротором двигатель исправен, когда вставлено полное сопротивление регулятора скорости в контуре ротора. Большое сопротивление в цепи ротора заставляет ток ротора почти совпадать по фазе с индуцированным напряжением ротора. В результате поле, создаваемое током ротора, почти в фазе с полем статора. Если два поля достигают максимального значения в то же время произойдет сильная магнитная реакция, приводящая к с высоким выходным крутящим моментом.
Однако, если все сопротивление регулятора скорости убрать с цепь ротора и двигатель запускается, характеристики крутящего момента плохие. Цепь ротора за вычетом сопротивления регулятора скорости состоит в основном из индуктивного реактивного сопротивления. Это означает, что ток ротора отстает от индуцированное напряжение ротора и, следовательно, ток ротора отстает от ток статора. В результате поле ротора, создаваемое током ротора. отстает от поля статора, которое создается током статора.В результирующая магнитная реакция двух полей относительно мала, поскольку они достигают своих максимальных значений в разных точках. Таким образом, Выходной пусковой момент асинхронного двигателя с фазным ротором плохой, когда все сопротивление снимается с цепи ротора.
Регулировка скорости
В предыдущих абзацах было показано, что вставка сопротивления на регуляторе скорости улучшает пусковой момент двигателя с фазным ротором на малых оборотах.Однако на обычных скоростях наблюдается обратный эффект. В Другими словами, регулирование скорости двигателя хуже, когда сопротивление добавляется в цепь ротора на более высокой скорости. По этой причине сопротивление регулятора скорости снимается, когда двигатель достигает своей номинальной скорости.
илл. 7 показывает скоростные характеристики асинхронного двигателя с фазным ротором. Обратите внимание, что кривая характеристики скорости, полученная, когда все сопротивление Вырезание регулятора скорости указывает на относительно хорошее регулирование скорости.Вторая кривая скоростной характеристики, возникающая, когда все сопротивление вставлен в регулятор скорости, имеет заметное падение скорости, поскольку нагрузка увеличивается. Это указывает на плохую регулировку скорости.
Коэффициент мощности
Коэффициент мощности асинхронного двигателя с фазным ротором на холостом ходу столь же низкий. отставание от 15 до 20 процентов. Однако, когда к двигателю приложена нагрузка, коэффициент мощности улучшается и увеличивается до 85-90%, отставание при номинальной нагрузке.
ill 8 — график коэффициента мощности ротора с фазной фазой. асинхронный двигатель от холостого хода до полной нагрузки. Низкое отставание коэффициент мощности на холостом ходу обусловлен тем, что намагничивающая составляющая тока нагрузки составляет такую большую часть общего тока двигателя. Намагничивание составляющая тока нагрузки намагничивает железо, вызывая взаимодействие между ротор и статор за счет взаимной индуктивности.
По мере увеличения механической нагрузки на двигатель синфазная составляющая тока увеличивается для обеспечения повышенных требований к мощности.Намагничивание Однако составляющая тока остается прежней. Поскольку общий мотор ток теперь более близок к фазе с линейным напряжением, есть улучшение коэффициента мощности.
ил. 7 Кривые частотных характеристик двигателя с фазным ротором
Операционная эффективность
Асинхронный двигатель с фазным ротором и отключенным всем сопротивлением. регулятора скорости и асинхронного двигателя с короткозамкнутым ротором показывают почти такой же КПД.Однако, когда двигатель должен работать на низкие скорости с отключением всего сопротивления в цепи ротора, эффективность двигателя плохая из-за потерь мощности в ваттах на резисторах регулятора скорости.
илл. 9 иллюстрирует эффективность индукции с фазным ротором. мотор. Верхняя кривая показывает самые высокие результаты операционной эффективности когда регулятор скорости находится в быстром положении и нет сопротивления вставлен в цепь ротора.Нижняя кривая показывает более низкую рабочую эффективность. Это происходит, когда регулятор скорости находится в медленном положении и все сопротивление регулятора вставлено в цепь ротора.
ил. 8 Коэффициент мощности асинхронного двигателя с фазным ротором
ил. 9 Кривые КПД асинхронного двигателя с фазным ротором
Реверс вращения
Направление вращения асинхронного двигателя с фазным ротором изменено на обратное. поменяв местами соединения любых двух из трех проводов, рис. 10.Эта процедура идентична процедуре, используемой для реверсирования направление вращения асинхронного двигателя с короткозамкнутым ротором.
ил. 10 Изменения, необходимые для изменения направления вращения
электродвигателя с фазным ротором
Электрик ни в коем случае не должен пытаться изменить направление вращения. асинхронного двигателя с фазным ротором путем переключения любого из выводов, питающих от контактных колец к регулятору скорости. Изменения в этих связях не изменит направление вращения двигателя.
РЕЗЮМЕ
Двигатель с фазным ротором сегодня редко устанавливается как новый двигатель, но есть все еще используется ряд двигателей. Двигатель с фазным ротором можно использовать для переменной скорости с вставкой вторичных резисторов. Стартовый ток и пусковой крутящий момент двигателя были главными соображениями при выборе двигателя с фазным ротором для установки. Есть еще много ссылок на двигатель с фазным ротором, используемый в Национальном электротехническом Код.
ВИКТОРИНА
Дайте исчерпывающие ответы на следующие вопросы.
1. Перечислите основные части асинхронного двигателя с фазным ротором.
2. Перечислите две причины, по которым асинхронный двигатель с ротором запускается с все сопротивление, вставленное в регулятор скорости.
3. Трехфазный асинхронный двигатель с фазным ротором имеет шесть полюсов и рассчитан на на 60 герц. Скорость этого двигателя при полной нагрузке со всем сопротивлением вырез из регулятора скорости составляет 1120 об / мин.Что такое синхронный скорость поля, создаваемого обмотками статора?
4. Определите процент скольжения при номинальной нагрузке для рассматриваемого двигателя. 3.
5. Почему вместо короткозамкнутого ротора используется асинхронный двигатель с фазным ротором? асинхронный двигатель для некоторых промышленных применений?
6. Почему низкий КПД асинхронного двигателя с фазным ротором? при работе с номинальной нагрузкой, когда все сопротивление вставлено в регулятор скорости?
7.Что нужно сделать, чтобы изменить направление вращения ротора с фазной фазой Индукционный двигатель?
8. Почему коэффициент мощности асинхронного двигателя с ротором низкий? нагрузка?
9. Перечислите два фактора, которые влияют на синхронную скорость вращения магнитное поле, создаваемое током в обмотках статора.
B. Выберите правильный ответ для каждого из следующих утверждений и поместите соответствующую букву в отведенное место.
10.Скорость двигателя с фазным ротором увеличена на:
а. вставка сопротивления в первичную цепь.
г. вставка сопротивления во вторичной цепи.
г. уменьшение сопротивления во вторичной цепи.
г. уменьшение сопротивления в первичной цепи.
11. Пусковой ток асинхронного двигателя с ротором ограничен:
а. уменьшение сопротивления в первичной цепи.
г.уменьшение сопротивления во вторичной цепи.
г. вставка сопротивления в первичную цепь.
г. вставка сопротивления во вторичной цепи.
12. Направление вращения электродвигателя с фазным ротором изменяют перестановкой мест. любые два из трех:
а. L1, L2, L3 c. М1, М2, М3
г. Т1, Т2, Т3 d. все эти.
13. Двигатели с фазным ротором могут использоваться с:
а. ручные регуляторы скорости.
г. автоматические регуляторы скорости.
г. выбор кнопки.
г. все эти.
14. Максимальный КПД двигателя с фазным ротором при полной нагрузке:
а. все сопротивление отключено от вторичной цепи.
г. все сопротивление отключено во вторичной цепи.
г. он работает медленно.
г. он работает на средней скорости.
15. Основным преимуществом многофазного двигателя с фазным ротором является то, что он a.имеет низкий пусковой момент. c. быстро изменится.
г. имеет широкий диапазон скоростей. d. имеет низкий диапазон скоростей.
16. Двигатель с фазным ротором назван так потому, что:
а. ротор намотан проволокой.
г. статор намотан проволокой.
г. Контроллер обмотан проводом.
г. все эти.
17. Намагничивающая составляющая тока нагрузки …
а. составляет небольшую часть от общего тока двигателя без нагрузки.
г. намагничивает железо, вызывая взаимодействие между ротором и статор.
г. составляет большую часть от общего тока двигателя при полной нагрузке.
г. не зависит от коэффициента мощности.
Что такое двигатель с обмоткой ротора и как он работает?
Электродвигатели — машины, преобразующие электричество в механическую энергию — повсеместно используются в мире машиностроения. Они являются краеугольным камнем инженерных достижений, таких как лифты, насосы и даже электромобили, благодаря способности использовать эффект электромагнитной индукции.Эти так называемые асинхронные двигатели используют переменный ток и электромагнетизм для создания вращательного движения и имеют множество конфигураций. Особый тип асинхронного двигателя переменного тока, известный как двигатели с фазным ротором, будет в центре внимания этой статьи. Хотя эти двигатели используются только в особых случаях, они имеют явное преимущество перед другими популярными вариантами (с короткозамкнутым ротором, синхронными двигателями и т. Д.) Благодаря своим уникальным характеристикам. Будут изучены анатомия и принцип действия этих двигателей, а также конкретные характеристики, которые делают их столь важными для приложений, в которых не могут быть реализованы другие, более популярные асинхронные двигатели.
Что такое двигатели с фазным ротором?
Двигатели с фазным ротором представляют собой специализированный тип двигателей переменного тока и работают во многом так же, как и другие асинхронные двигатели. Они состоят из двух основных компонентов: внешнего статора и внутреннего ротора, разделенных небольшим воздушным зазором. Статор, как правило, одинаков для всех асинхронных двигателей и состоит из металлических пластин, удерживающих на месте обмотки из медной или алюминиевой проволоки. В статоре есть три отдельные катушки, которые питаются трехфазным переменным током, что просто означает, что каждая из них питается от отдельного переменного тока.Это не всегда так, поскольку некоторые двигатели являются однофазными двигателями, но двигатели с фазным ротором обычно всегда трехфазные. Тем не менее, эти три фазы создают магнитное поле, которое смещается вместе с переменными токами. Это создает вращающееся магнитное поле (RMF), которое действует на ротор. В двигателях с фазным ротором ротор «намотан» проводом, похожим на статор, а их концевые выводы соединены с 3 контактными кольцами на выходном валу. Эти контактные кольца прикреплены к щеткам и блокам резисторов переменной мощности, где операторы могут изменять скорость двигателя, изменяя сопротивление через катушки ротора.Эти контактные кольца позволяют регулировать скорость и крутящий момент и являются определяющей особенностью двигателей с фазным ротором (именно поэтому эти двигатели часто называют двигателями с фазным ротором).
Как работают двигатели с фазным ротором?
Мы рекомендуем прочитать нашу статью об асинхронных двигателях, чтобы понять основные законы, общие для всех асинхронных машин, но эта статья кратко объяснит научные основы работы двигателя с фазным ротором.
Эти двигатели классифицируются как асинхронные двигатели, в которых существует несоответствие (известное как «скольжение») между скоростью RMF статора (синхронная скорость) и выходной скоростью (номинальная скорость).При создании необходимого тока, напряжения и магнитной силы в обмотках ротора двигатель всегда будет испытывать скольжение между вращающимся полем и ротором. Не стесняйтесь посетить нашу статью о типах двигателей переменного тока, чтобы узнать больше.
Двигатели с фазным ротором отличаются тем, как их ротор взаимодействует со статором. Обмотки ротора подключены к вторичной цепи, содержащей контактные кольца, щетки и внешние резисторы, и питаются от отдельного трехфазного переменного тока. При запуске внешнее сопротивление, передаваемое этой вторичной цепи, приводит к тому, что ток ротора снижает силу RMF статора (он работает более «синфазно» с RMF статора).Это означает, что скорость вращения можно контролировать, изменяя сопротивление, когда двигатель достигает 100% скорости, что позволяет операторам выбирать пусковой момент и рабочие характеристики. Это приводит к плавному запуску, высокому начальному крутящему моменту, низкому начальному току и способности регулировать скорость вращения, чего нельзя достичь с помощью более простых конструкций, таких как двигатели с короткозамкнутым ротором (более подробную информацию об этой конструкции можно найти в нашей статье на двигателях с короткозамкнутым ротором).
Технические характеристики двигателя с обмоткой ротора
Спецификации двигателя с фазным ротором включают понимание спецификаций всех асинхронных двигателей, которые можно просмотреть в нашей статье об асинхронных двигателях.В этой статье будут освещены важные концепции двигателей с фазным ротором, которые необходимо понять перед покупкой одного из них, но помните, что это не все.
Пусковой ток
Статор RMF вращается на полной скорости при запуске трехфазного асинхронного двигателя, в то время как ротор изначально находится в состоянии покоя. Ротор испытывает индуцированный ток, когда через него проходит RMF статора, и единственным ограничивающим фактором для этого тока является сопротивление обмоток ротора (ток = напряжение / сопротивление).Это приводит к увеличению тока в роторе, что увеличивает потребность в токе статора и, следовательно, вызывает «бросок» пускового тока в двигатель. Этот ток может быть в два-семь раз выше номинального тока, указанного на паспортной табличке, и может вызвать серьезные проблемы при высоком напряжении. Когда двигатель достигает своей номинальной скорости, ротор генерирует в статоре «обратную ЭДС», которая снижает ток статора до номинального уровня. Пусковой ток — это то, что минимизируется в двигателях с фазным ротором за счет увеличения сопротивления в обмотках ротора (I = V / R, где R увеличивается), и почему они имеют такие плавные пусковые характеристики.
Крутящий момент двигателя и кривая крутящего момента-скорости
Самая важная спецификация двигателей с фазным ротором — это то, как они работают при включении, и это визуализируется посредством графиков крутящего момента-скорости. Асинхронные двигатели могут значительно превышать как их номинальный крутящий момент, так и ток, когда скорость не 100%; Кривые крутящего момента / скорости отображают это переходное поведение, а на Рисунке 1 показана общая кривая крутящего момента / скорости для асинхронных двигателей с обозначенными важными точками.
Рисунок 1: Кривая крутящий момент-скорость для асинхронных двигателей.
Пусковой крутящий момент — это крутящий момент, возникающий при начальном броске тока, который всегда превышает номинальный крутящий момент. Вытягивающий момент — это максимальный крутящий момент, достигнутый до установившегося режима, а номинальный крутящий момент — это то, что обеспечивается, когда двигатель работает на 100% скорости. Эта связанная скорость не совсем равна синхронной скорости RMF, и это скольжение показано на рисунке 1.
Двигатели, в которых используются популярные конструкции с короткозамкнутым ротором, имеют ограниченный контроль над кривыми крутящего момента-скорости (подробнее см. В нашей статье о двигателях с короткозамкнутым ротором).Стержни ротора с короткозамкнутым ротором закорочены; это приводит к невозможности изменить сопротивление ротора, а это означает, что единственный способ повлиять на скорость вращения — это изменить напряжение (I = V / R, где R является постоянным). Это может вызвать проблемы в больших двигателях, где необходимый входной ток может стать опасно высоким. Двигатели с фазным ротором решают эту проблему, изменяя сопротивление ротора с помощью вторичной цепи, присоединенной к блоку сопротивления переменной мощности и контактным кольцам. За счет увеличения сопротивления в роторе через контактные кольца, тяговый момент может быть достигнут на гораздо более низких скоростях, что обеспечивает более высокий начальный крутящий момент и более низкий пусковой ток.При достижении синхронной скорости сопротивление ротора также может быть закорочено, в результате чего двигатель с фазным ротором ведет себя так, как будто это двигатель с короткозамкнутым ротором. На рисунке 2 показано влияние увеличения сопротивления ротора на выходной крутящий момент.
Рис. 2. Как изменение сопротивления ротора влияет на пусковой и отрывной крутящий момент.
Из этого графика видно, что двигатель с фазным ротором обеспечивает управление током, крутящим моментом и скоростью намного лучше, чем другие конструкции. Изменяя сопротивление, этим двигателям потребуется меньший начальный пусковой ток для компенсации, они будут иметь более сильный пусковой крутящий момент и могут максимизировать свой пусковой крутящий момент, также сделав его крутящим моментом отрыва (пример кривой R2 на рисунке 2).Такой подход приводит к созданию двигателя с регулируемой скоростью, высоким пусковым моментом и низким пусковым током, с возможностью изменять эти характеристики по желанию оператора.
Заявки и критерии выбора
Двигатели с фазным ротором могут справиться с тем, что другие асинхронные двигатели не могут, а именно с регулированием скорости, тока и крутящего момента. Способность увеличивать сопротивление ротора при запуске двигателя позволяет плавно разгонять тяжелые нагрузки до номинальной скорости. Когда необходимо минимизировать пусковой ток или существует ограничение пускового тока ниже, чем могут выдержать двигатели с короткозамкнутым ротором / синхронные двигатели, рассмотрите возможность использования двигателя с фазным ротором.
У двигателей с фазным ротором есть недостатки, и они являются следствием их сложной конструкции. Вторичный контур создает больше возможностей для ошибки, а щетки с контактным кольцом могут представлять угрозу безопасности, если не проверять их регулярно (изношенные щетки могут вызвать искрение и увеличить риск возгорания). Эти двигатели также дороги в обслуживании, что увеличивает их и без того дорогостоящую цену. Их сложность также снижает общий КПД двигателя, и двигатель с короткозамкнутым ротором следует выбирать, если эффективность является основной проблемой или конструктивным ограничением.
Несмотря на то, что двигатель с фазным ротором и его регулируемые характеристики крутящего момента и скорости являются дорогими и менее эффективными, они отлично подходят для управления крупными шаровыми мельницами, большими прессами, насосами с регулируемой скоростью, кранами, подъемниками и другими высокоинерционными нагрузками. Они также отлично подходят для любого приложения, которому нужен плавный запуск и возможность изменять скорость. Они охватывают основы, недоступные для других асинхронных двигателей, и неоценимы для разработчиков, которым необходим абсолютный контроль над скоростью и крутящим моментом.
Сводка
В этой статье представлено понимание того, что такое двигатели с фазным ротором, как они работают и каковы их основные характеристики, определяющие, когда они должны быть указаны по сравнению со стандартными асинхронными двигателями.Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://hyperphysics.phy-astr.gsu.edu/hbase/mintage/indmot.html
- http://www.egr.unlv.edu/~eebag/Induction%20Motors.pdf
- https://oaktrust.library.tamu.edu/bitstream/handle/1969.1/163595/T17123-130.pdf? последовательность = 1 & isAllowed = y
- http://www.animations.physics.unsw.edu.au/jw/electricmotors.html
- https://scholar.cu.edu.eg
Прочие изделия для двигателей
Больше от Машины, инструменты и расходные материалы
Полифазные асинхронные двигателитесла | Двигатели переменного тока
Большинство двигателей переменного тока являются асинхронными. Асинхронные двигатели пользуются популярностью из-за их прочности и простоты. Фактически, 90% промышленных двигателей — это асинхронные двигатели.
Никола Тесла разработал основные принципы многофазного асинхронного двигателя в 1883 году и к 1888 году создал модель мощностью в половину лошадиных сил (400 Вт).Tesla продала права на производство Джорджу Вестингаузу за 65000 долларов.
Наиболее крупными (> 1 л.с. или 1 кВт) промышленными двигателями являются многофазные асинхронные двигатели . Под многофазностью мы подразумеваем, что статор содержит несколько различных обмоток на каждый полюс двигателя, приводимых в действие соответствующими синусоидальными волнами со сдвигом во времени.
На практике это две или три фазы. Крупные промышленные двигатели трехфазные. Хотя для простоты мы включили многочисленные иллюстрации двухфазных двигателей, мы должны подчеркнуть, что почти все многофазные двигатели являются трехфазными.
Под асинхронным двигателем мы имеем в виду, что обмотки статора индуцируют ток в проводниках ротора, как трансформатор, в отличие от коллекторного двигателя постоянного тока с коллектором.
Конструкция асинхронного двигателя переменного тока
Асинхронный двигатель состоит из ротора, известного как якорь, и статора, содержащего обмотки, подключенные к многофазному источнику энергии, как показано на рисунке ниже. Простой двухфазный асинхронный двигатель, представленный ниже, похож на двигатель мощностью 1/2 лошадиные силы, который Никола Тесла представил в 1888 году.
Многофазный асинхронный двигатель Tesla
Статор на рисунке выше намотан парами катушек, соответствующих фазам доступной электрической энергии. Статор двухфазного асинхронного двигателя выше имеет 2 пары катушек, по одной паре для каждой из двух фаз переменного тока.
Отдельные катушки пары соединены последовательно и соответствуют противоположным полюсам электромагнита. То есть одна катушка соответствует N-полюсу, другая — S-полюсу, пока фаза переменного тока не изменит полярность.Другая пара катушек ориентирована в пространстве под углом 90 ° к первой паре.
Эта пара катушек подключена к переменному току, сдвинутому во времени на 90 ° в случае двухфазного двигателя. Во времена Теслы источником двух фаз переменного тока был двухфазный генератор переменного тока.
Статор на рисунке выше имеет выступающих частей , явно выступающих полюсов, которые использовались в ранних асинхронных двигателях Tesla. Эта конструкция используется и по сей день для двигателей с малой мощностью (<50 Вт). Однако для более мощных двигателей меньшая пульсация крутящего момента и более высокий КПД достигается, если катушки встроены в пазы, вырезанные в пластинах статора (рисунок ниже).
Рама статора с пазами для обмоток
Пластины статора представляют собой тонкие изолированные кольца с прорезями, пробитыми из листов электротехнической стали. Набор из них закреплен концевыми винтами, которые также могут удерживать концевые кожухи.
Статор с обмотками 2 φ (а) и 3 φ (б)
На рисунке выше обмотки двухфазного и трехфазного двигателей установлены в пазы статора.Катушки наматываются на внешнее приспособление, а затем вставляются в пазы. Изоляция, зажатая между краем катушки и пазом, защищает от истирания.
Фактические обмотки статора более сложные, чем отдельные обмотки на полюс на рисунке выше. Сравнивая двигатель 2-φ с двигателем Tesla 2-φ с явными полюсами, количество катушек такое же. В реальных больших двигателях обмотка полюса разделена на идентичные катушки, вставленные во множество пазов меньшего размера, чем указано выше.
Эта группа называется фазовой лентой (см. Рисунок ниже).Распределенные катушки фазового пояса подавляют некоторые нечетные гармоники, создавая более синусоидальное распределение магнитного поля по полюсу. Это показано в разделе синхронного двигателя.
В пазах на краю стойки может быть меньше витков, чем в других пазах. Краевые пазы могут содержать обмотки от двух фаз. То есть фазовые пояса перекрываются.
Ключом к популярности асинхронного двигателя переменного тока является его простота, о чем свидетельствует простой ротор (рисунок ниже).Ротор состоит из вала, стального пластинчатого ротора и встроенной беличьей клетки из меди или алюминия , показанной на (b), снятой с ротора.
По сравнению с якорем двигателя постоянного тока, здесь нет коммутатора. Это устраняет щетки, искрение, искрение, графитовую пыль, регулировку и замену щеток, а также повторную обработку коллектора.
Многослойный ротор с (а) встроенной беличьей клеткой, (б) токопроводящей клеткой, удаленной с ротора
Проводники в короткозамкнутой клетке могут быть перекошены, перекручены относительно вала.Несоосность пазов статора снижает пульсации крутящего момента.
Сердечники ротора и статора состоят из пакета изолированных пластин. Пластины покрыты изолирующим оксидом или лаком для минимизации потерь на вихревые токи. Сплав, используемый в пластинах, выбран из соображений низких гистерезисных потерь.
Теория работы асинхронных двигателей
Краткое объяснение работы заключается в том, что статор создает вращающееся магнитное поле, которое волочит ротор.
Теория работы асинхронных двигателей основана на вращающемся магнитном поле. Один из способов создания вращающегося магнитного поля — вращение постоянного магнита. Если движущиеся магнитные линии потока разрезают проводящий диск, он будет следовать за движением магнита.
Линии магнитного потока, разрезающие проводник, будут индуцировать напряжение и, как следствие, протекание тока в проводящем диске. Этот поток тока создает электромагнит, полярность которого противодействует движению постоянного магнита — Закон Ленца .
Полярность электромагнита такова, что он притягивается к постоянному магниту. Диск следует с немного меньшей скоростью, чем постоянный магнит.
Вращающееся магнитное поле создает крутящий момент в проводящем диске
Крутящий момент, развиваемый диском, пропорционален количеству силовых линий, разрезающих диск, и скорости, с которой он разрезает диск. Если бы диск вращался с той же скоростью, что и постоянный магнит, не было бы ни потока, разрезающего диск, ни индуцированного тока, ни поля электромагнита, ни крутящего момента.
Таким образом, скорость диска всегда будет ниже скорости вращающегося постоянного магнита, так что линии потока, разрезающие диск, индуцируют ток, создают электромагнитное поле в диске, которое следует за постоянным магнитом.
Если к диску приложена нагрузка, замедляющая его, будет развиваться больший крутящий момент, поскольку больше линий магнитного потока разрезают диск. Крутящий момент пропорционален скольжению , степени, на которую диск отстает от вращающегося магнита. Большее скольжение соответствует большему потоку, разрезающему проводящий диск, создавая больший крутящий момент.
В основе аналогового автомобильного вихретокового спидометра лежит принцип, проиллюстрированный выше. Когда диск удерживается пружиной, отклонение диска и иглы пропорционально скорости вращения магнита.
Вращающееся магнитное поле создается двумя катушками, расположенными под прямым углом друг к другу, и приводится в действие токами, которые не совпадают по фазе на 90 °. Это не должно вызывать удивления, если вы знакомы с диаграммами Лиссажу на осциллографах.
В противофазе (90 °) синусоидальные волны образуют круговой узор Лиссажу
На приведенном выше рисунке круговой контур Лиссажу получается путем подачи на входы осциллографа горизонтального и вертикального сдвига по фазе синусоидальных волн на 90 °.Начиная с (a) с максимальным отклонением «X» и минимальным «Y», след перемещается вверх и влево в направлении (b).
Между (a) и (b) две формы волны равны 0,707 Впик при 45 °. Эта точка (0,707, 0,707) попадает на радиус круга между (a) и (b). Трасса перемещается в (b) с минимальным отклонением «X» и максимальным «Y». При максимальном отрицательном отклонении «X» и минимальном отклонении «Y» след переместится в (c).
Затем с минимальным «X» и максимальным отрицательным «Y» он переходит в (d), а затем обратно в (a), завершая один цикл.
Окружность синуса по оси X и косинуса по оси Y
На рисунке показаны две синусоидальные волны с фазовым сдвигом на 90 °, приложенные к отклоняющим пластинам осциллографа, расположенным под прямым углом в пространстве. Комбинация фазированных синусоидальных волн на 90 ° и отклонения под прямым углом дает двумерный узор — круг. Этот круг очерчен электронным лучом, вращающимся против часовой стрелки.
Для справки, на рисунке ниже показано, почему синфазные синусоидальные волны не образуют круговой диаграммы.Равное отклонение «X» и «Y» перемещает освещенное пятно из исходной точки в (a) вправо (1,1) в (b), назад вниз влево к исходной точке в (c), вниз влево до (-1 .-1) в точке (d) и обратно в исходное положение. Линия получается равными прогибами по обеим осям; y = x — прямая линия.
Нет кругового движения синфазных сигналов
Если пара синусоидальных волн, сдвинутых на 90 ° по фазе, создает круговую форму Лиссажу, аналогичная пара токов должна быть способна создавать круговое вращающееся магнитное поле.Так обстоит дело с двухфазным двигателем. По аналогии, три обмотки, расположенные в пространстве на 120 ° друг от друга и питаемые соответствующими фазированными токами 120 °, также будут создавать вращающееся магнитное поле.
Вращающееся магнитное поле синусоидальной волны, фазированной под углом 90 °
По мере того, как синусоидальные волны, фазированные под углом 90 °, на рисунке выше, развиваются от точек (a) до (d), магнитное поле вращается против часовой стрелки (рисунки a-d) следующим образом:
- (а) φ-1 максимум, φ-2 ноль
- (a ’) φ-1 70%, φ-2 70%
- (б) φ-1 ноль, φ-2 максимум
- (c) φ-1 максимально отрицательный, φ-2 ноль
- (d) φ-1 ноль, φ-2 максимально отрицательный
Полная скорость двигателя и скорость синхронного двигателя
Скорость вращения вращающегося магнитного поля статора связана с количеством пар полюсов на фазу статора.На приведенном ниже рисунке «полная скорость» всего шесть полюсов или три пары полюсов и три фазы. Однако на каждую фазу приходится только одна пара полюсов.
Магнитное поле будет вращаться один раз за цикл синусоидальной волны. В случае мощности 60 Гц поле вращается со скоростью 60 раз в секунду или 3600 оборотов в минуту (об / мин). При мощности 50 Гц он вращается со скоростью 50 оборотов в секунду или 3000 об / мин. 3600 и 3000 об / мин — это синхронная скорость двигателя.
Хотя ротор асинхронного двигателя никогда не достигает этой скорости, это определенно верхний предел.Если мы удвоим количество полюсов двигателя, синхронная скорость уменьшится вдвое, потому что магнитное поле вращается в пространстве на 180 ° на 360 ° электрической синусоидальной волны.
Удвоение полюсов статора уменьшает синхронную скорость вдвое
Синхронная скорость определяется по формуле:
N с = 120 · f / P N с = синхронная скорость в об / мин f = частота подаваемой мощности, Гц P = общее количество полюсов на фазу, кратное 2
Пример: На приведенном выше рисунке «половинная скорость» четыре полюса на фазу (3 фазы).Синхронная скорость для мощности 50 Гц составляет: S = 120 · 50/4 = 1500 об / мин
Краткое объяснение асинхронного двигателя состоит в том, что вращающееся магнитное поле, создаваемое статором, увлекает за собой ротор.
Более подробное и правильное объяснение состоит в том, что магнитное поле статора индуцирует переменный ток в проводниках короткозамкнутого ротора, которые составляют вторичную обмотку трансформатора. Этот индуцированный ток ротора, в свою очередь, создает магнитное поле.
Магнитное поле вращающегося статора взаимодействует с этим полем ротора.Поле ротора пытается выровняться с полем вращающегося статора. Результат — вращение ротора с короткозамкнутым ротором. Если бы не было механической нагрузки крутящего момента двигателя, подшипников, сопротивления ветра или других потерь, ротор вращался бы с синхронной скоростью.
Однако проскальзывание между ротором и полем статора синхронной скорости развивает крутящий момент. Именно магнитный поток, разрезающий проводники ротора при его проскальзывании, создает крутящий момент. Таким образом, нагруженный двигатель будет скользить пропорционально механической нагрузке.
Если бы ротор работал с синхронной скоростью, не было бы потока статора, разрезающего ротор, не было бы тока, индуцированного в роторе, не было бы крутящего момента.
Крутящий момент в асинхронных двигателях
При первой подаче питания на двигатель ротор находится в состоянии покоя, а магнитное поле статора вращается с синхронной скоростью N s . Поле статора режет ротор с синхронной скоростью N s . Ток, индуцированный в закороченных витках ротора, является максимальным, как и частота тока, частота сети.
По мере увеличения скорости ротора скорость, с которой магнитный поток статора сокращает ротор, представляет собой разницу между синхронной скоростью N s и фактической скоростью N ротора, или (N s — N). Отношение фактического потока, разрезающего ротор, к синхронной скорости определяется как скольжение :
s = (N s - N) / N s где: N s = синхронная скорость, N = скорость ротора
Частота тока, наведенного в проводники ротора, равна только частоте сети при пуске двигателя и уменьшается по мере приближения ротора к синхронной скорости. Частота ротора определяется по:
f r = s · f где: s = скольжение, f = частота сети статора
Скольжение при 100% крутящем моменте обычно составляет 5% или меньше в асинхронных двигателях. Таким образом, для частоты сети f = 50 Гц частота наведенного тока в роторе fr = 0,05 · 50 = 2,5 Гц. Почему он такой низкий? Магнитное поле статора вращается с частотой 50 Гц. Скорость вращения ротора на 5% меньше.
Вращающееся магнитное поле режет только ротор на 2.5 Гц. 2,5 Гц — это разница между синхронной скоростью и фактической скоростью ротора. Если ротор вращается немного быстрее при синхронной скорости, никакой магнитный поток не будет резать ротор вообще, f r = 0.
Крутящий момент и скорость в зависимости от% скольжения. % N с =% синхронной скорости
На рисунке выше показано, что пусковой крутящий момент, известный как крутящий момент при заторможенном роторе (LRT), превышает 100% крутящего момента при полной нагрузке (FLT), безопасного продолжительного крутящего момента.Крутящий момент заблокированного ротора составляет около 175% от FLT для приведенного выше примера двигателя.
Пусковой ток, известный как , ток заторможенного ротора (LRC) составляет 500% от тока полной нагрузки (FLC), безопасного рабочего тока. Ток большой, потому что это аналог закороченной вторичной обмотки трансформатора. Когда ротор начинает вращаться, крутящий момент может немного уменьшаться для определенных классов двигателей до значения, известного как крутящий момент , подтягивающий .
Это наименьшее значение крутящего момента, с которым когда-либо сталкивался пусковой двигатель.Когда ротор набирает 80% синхронной скорости, крутящий момент увеличивается со 175% до 300% крутящего момента полной нагрузки. Этот пробивной крутящий момент происходит из-за большего, чем обычно, 20% скольжения.
Сила тока в этот момент уменьшилась лишь незначительно, но после этой точки будет быстро уменьшаться. Когда ротор ускоряется с точностью до нескольких процентов от синхронной скорости, как крутящий момент, так и ток значительно уменьшаются. При нормальной работе скольжение будет составлять всего несколько процентов.
Для работающего двигателя любой участок кривой крутящего момента ниже 100% номинального крутящего момента является нормальным.Нагрузка двигателя определяет рабочую точку на кривой крутящего момента. В то время как крутящий момент и ток двигателя могут превышать 100% в течение нескольких секунд во время запуска, продолжительная работа выше 100% может привести к повреждению двигателя.
Любая крутящая нагрузка двигателя, превышающая крутящий момент пробоя, приведет к остановке двигателя. Крутящий момент, скольжение и ток будут приближаться к нулю в условиях нагрузки «без механического крутящего момента». Это состояние аналогично разомкнутому вторичному трансформатору.
Существует несколько основных конструкций асинхронных двигателей, которые значительно отличаются от кривой крутящего момента, приведенной выше.Различные конструкции оптимизированы для запуска и работы с различными типами нагрузок. Крутящий момент заблокированного ротора (LRT) для двигателей различных конструкций и размеров находится в диапазоне от 60% до 350% момента полной нагрузки (FLT).
Пусковой ток или ток заторможенного ротора (LRC) может находиться в диапазоне от 500% до 1400% от тока полной нагрузки (FLC). Этот потребляемый ток может вызвать проблемы с запуском больших асинхронных двигателей.
Классы двигателей NEMA и IEC
Различные стандартные классы (или конструкции) двигателей, соответствующие кривым крутящего момента (рисунок ниже), были разработаны для лучшего управления нагрузками различных типов.Национальная ассоциация производителей электрооборудования (NEMA) определила классы двигателей A, B, C и D для удовлетворения этих требований к приводам.
Аналогичные классы N и H Международной электротехнической комиссии (МЭК) соответствуют конструкциям NEMA B и C соответственно.
Характеристики для проектов NEMA
Все двигатели, за исключением класса D, работают со скольжением 5% или менее при полной нагрузке.
- Класс B (IEC Class N) Двигатели используются по умолчанию в большинстве приложений.При пусковом моменте LRT = от 150% до 170% от FLT он может запускать большинство нагрузок без чрезмерного пускового тока (LRT). КПД и коэффициент мощности высокие. Обычно он приводит в действие насосы, вентиляторы и станки.
- Класс A Пусковой момент такой же, как у класса B. Пусковой момент и пусковой ток (LRT) выше. Этот двигатель справляется с переходными перегрузками, которые встречаются в машинах для литья под давлением.
- Класс C (IEC Class H) имеет более высокий пусковой крутящий момент, чем классы A и B при LRT = 200% от FLT.Этот двигатель применяется для тяжелых пусковых нагрузок, которые необходимо приводить в действие с постоянной скоростью, таких как конвейеры, дробилки, поршневые насосы и компрессоры.
- Двигатели класса D имеют самый высокий пусковой момент (LRT) в сочетании с низким пусковым током из-за высокого скольжения (от 5% до 13% при FLT). Высокое скольжение приводит к более низкой скорости. Регулировка скорости плохая. Тем не менее, двигатель отлично справляется с нагрузками с переменной скоростью, например с маховиком для аккумулирования энергии. Применения включают пробивные прессы, ножницы и подъемники.
- Класс E Двигатели — это более эффективная версия класса B.
- Класс F Двигатели имеют гораздо более низкие LRC, LRT и крутящий момент, чем у класса B. Они управляют постоянными, легко запускаемыми нагрузками.
Коэффициент мощности асинхронных двигателей
Асинхронные двигатели имеют отстающий (индуктивный) коэффициент мощности от линии электропередачи. Коэффициент мощности больших полностью нагруженных высокоскоростных двигателей может достигать 90% для больших высокоскоростных двигателей. При 3/4 полной нагрузки максимальный коэффициент мощности высокоскоростного двигателя может составлять 92%.
Коэффициент мощности малых тихоходных двигателей может составлять всего 50%. При запуске коэффициент мощности может находиться в диапазоне от 10% до 25%, увеличиваясь по мере достижения ротором скорости.
Коэффициент мощности (PF) значительно зависит от механической нагрузки двигателя (рисунок ниже). Ненагруженный двигатель аналогичен трансформатору без резистивной нагрузки на вторичной обмотке. Небольшое сопротивление отражается от вторичной обмотки (ротора) к первичной обмотке (статору).
Таким образом, в линии электропередачи присутствует реактивная нагрузка до 10% коэффициента мощности.Когда ротор нагружен, возрастающая резистивная составляющая отражается от ротора к статору, увеличивая коэффициент мощности.
Коэффициент мощности и КПД асинхронного двигателя
КПД асинхронных двигателей
Большие трехфазные двигатели более эффективны, чем трехфазные двигатели меньшего размера, и почти все однофазные двигатели. КПД большого асинхронного двигателя может достигать 95% при полной нагрузке, хотя чаще встречается 90%.
Эффективность малонагруженного или ненагруженного асинхронного двигателя низкая, поскольку большая часть тока связана с поддержанием намагничивающего потока. Когда нагрузка крутящего момента увеличивается, больше тока потребляется для создания крутящего момента, в то время как ток, связанный с намагничиванием, остается фиксированным. Эффективность при 75% FLT может быть немного выше, чем при 100% FLT.
КПД снижается на несколько процентов при FLT 50% и снижается еще на несколько процентов при FLT 25%. Эффективность становится низкой только ниже 25% FLT.Изменение КПД в зависимости от нагрузки показано на рисунке выше.
Асинхронные двигатели, как правило, имеют завышенные размеры, чтобы гарантировать, что их механическая нагрузка может запускаться и приводиться в действие при любых условиях эксплуатации. Если многофазный двигатель нагружен менее 75% номинального крутящего момента, когда КПД достигает пика, КПД страдает лишь незначительно до 25% FLT.
Корректор коэффициента мощности Nola
Фрэнк Нола из НАСА предложил корректор коэффициента мощности (PFC) в качестве энергосберегающего устройства для однофазных асинхронных двигателей в конце 1970-х годов.Он основан на предположении, что асинхронный двигатель с неполной нагрузкой менее эффективен и имеет более низкий коэффициент мощности, чем двигатель с полной нагрузкой. Таким образом, можно сэкономить энергию в частично загруженных двигателях, в частности, в двигателях 1-φ.
Энергия, потребляемая для поддержания магнитного поля статора, относительно фиксирована по отношению к изменениям нагрузки. Хотя в полностью загруженном двигателе экономить нечего, напряжение на частично загруженном двигателе может быть уменьшено, чтобы уменьшить энергию, необходимую для поддержания магнитного поля.
Это увеличит коэффициент мощности и эффективность. Это была хорошая концепция для заведомо неэффективных однофазных двигателей, для которых она предназначалась.
Эта концепция не очень применима к большим трехфазным двигателям. Из-за их высокого КПД (90% +) экономия энергии невелика. Более того, двигатель с КПД 95% по-прежнему имеет КПД 94% при 50% крутящем моменте при полной нагрузке (FLT) и 90% КПД при 25% FLT.
Потенциальная экономия энергии при переходе от 100% FLT к 25% FLT — это разница в эффективности 95% — 90% = 5%.Это не 5% мощности при полной нагрузке, а 5% мощности при пониженной нагрузке. Корректор коэффициента мощности Nola может быть применим к 3-фазному двигателю, который большую часть времени простаивает (ниже 25% FLT), например к пробивному прессу.
Срок окупаемости дорогостоящего электронного контроллера оценивается как непривлекательный для большинства приложений. Тем не менее, он может быть экономичным в составе электронного пускателя двигателя или регулятора скорости.
Асинхронные двигатели в качестве генераторов переменного тока
Асинхронный двигатель может работать как генератор переменного тока, если он приводится в действие крутящим моментом, превышающим 100% синхронной скорости (рисунок ниже).Это соответствует нескольким% «отрицательного» скольжения, скажем, -1%.
Это означает, что поскольку мы вращаем двигатель быстрее, чем синхронная скорость, ротор движется на 1% быстрее, чем вращающееся магнитное поле статора. Обычно он отстает в двигателе на 1%. Поскольку ротор разрезает магнитное поле статора в противоположном направлении (впереди), ротор индуцирует напряжение в статоре, возвращая электрическую энергию обратно в линию электропередачи.
Отрицательный момент превращает асинхронный двигатель в генератор
Такой индукционный генератор должен возбуждаться «живым» источником мощностью 50 или 60 Гц.В случае сбоя в электроснабжении энергокомпании выработка электроэнергии невозможна. Этот тип генератора не подходит в качестве резервного источника питания.
В качестве вспомогательного ветряного генератора он имеет то преимущество, что он не требует автоматического выключателя отключения питания для защиты ремонтных бригад.
Он отказоустойчив.
Небольшие удаленные (от электросети) установки могут быть выполнены с самовозбуждением путем размещения конденсаторов параллельно фазам статора. Если снять нагрузку, остаточный магнетизм может вызвать небольшой ток.
Этот ток может протекать через конденсаторы без рассеивания мощности. Когда генератор достигает полной скорости, ток увеличивается, чтобы подать ток намагничивания на статор. В этот момент может быть приложена нагрузка. Слабое регулирование напряжения. Асинхронный двигатель может быть преобразован в генератор с самовозбуждением путем добавления конденсаторов.
Процедура запуска заключается в доведении ветряной турбины до скорости в двигательном режиме путем подачи на статор нормального напряжения линии электропередачи.Любая вызванная ветром скорость турбины, превышающая синхронную, будет развивать отрицательный крутящий момент, возвращая мощность в линию электропередачи, изменяя нормальное направление электрического счетчика киловатт-часов.
В то время как асинхронный двигатель представляет отстающий коэффициент мощности по отношению к линии электропередачи, асинхронный генератор переменного тока имеет ведущий коэффициент мощности. Индукционные генераторы не получили широкого распространения на обычных электростанциях.
Скорость привода паровой турбины стабильна и регулируется в соответствии с требованиями синхронных генераторов переменного тока.Синхронные генераторы также более эффективны.
Скорость ветряной турбины трудно контролировать, и скорость ветра может изменяться порывами. Асинхронный генератор лучше справляется с этими колебаниями из-за собственного проскальзывания. Это меньше нагружает зубчатую передачу и механические компоненты, чем синхронный генератор.
Однако это допустимое изменение скорости составляет всего около 1%. Таким образом, индукционный генератор, подключенный к прямой линии, считается ветряной турбиной с фиксированной скоростью (см. Асинхронный генератор с двойным питанием для истинного генератора переменного тока с регулируемой скоростью).
Несколько генераторов или несколько обмоток на общем валу можно переключать, чтобы обеспечить высокую и низкую скорость, чтобы приспособиться к переменным ветровым условиям.
Запуск двигателя и регулировка скорости
Некоторые асинхронные двигатели могут потреблять более 1000% тока полной нагрузки во время запуска; хотя чаще встречается несколько сотен процентов. Небольшие двигатели мощностью в несколько киловатт или меньше могут запускаться путем прямого подключения к линии электропередачи.
Пуск больших двигателей может вызвать просадку напряжения в сети, что повлияет на другие нагрузки.Автоматические выключатели, рассчитанные на запуск двигателя (аналогичные плавким предохранителям с задержкой срабатывания), должны заменить стандартные автоматические выключатели для запуска двигателей мощностью в несколько киловатт. Этот выключатель допускает перегрузку по току на время пуска.
Пускатель асинхронного двигателя с автотрансформатором
В двигателяхмощностью более 50 кВт используются пускатели двигателей для снижения линейного тока с нескольких сотен до нескольких сотен процентов от тока полной нагрузки. Автотрансформатор прерывистого режима может снизить напряжение статора на долю минуты в течение интервала пуска с последующим приложением полного линейного напряжения, как показано на рисунке выше.
Замыкание контактов S приводит к пониженному напряжению во время интервала запуска. Контакты S размыкаются, а контакты R замыкаются после запуска. Это снижает пусковой ток, скажем, до 200% от тока полной нагрузки. Поскольку автотрансформатор используется только в течение короткого интервала пуска, его размеры могут быть значительно меньше, чем у агрегата, работающего в непрерывном режиме.
Трехфазные двигатели, работающие от однофазной сети
Трехфазные двигатели будут работать от однофазных так же легко, как и однофазные двигатели.Единственная проблема для любого двигателя — это запуск. Иногда 3-фазные двигатели приобретаются для использования с однофазными, если предполагается трехфазное питание.
Номинальная мощность должна быть на 50% больше, чем у сопоставимого однофазного двигателя, чтобы компенсировать одну неиспользуемую обмотку. Однофазное напряжение подается на пару обмоток одновременно с пусковым конденсатором, включенным последовательно с третьей обмоткой.
Пусковой выключатель размыкается на рисунке ниже при запуске двигателя. Иногда во время работы остается конденсатор меньшего размера, чем пусковой.
Пуск трехфазного двигателя от однофазного
Схема на приведенном выше рисунке для работы трехфазного двигателя на однофазной сети известна как статический преобразователь фазы , если вал двигателя не нагружен. Кроме того, двигатель работает как трехфазный генератор.
Трехфазное питание можно отводить от трех обмоток статора для питания другого трехфазного оборудования. Конденсатор подает фазу синтетический примерно на полпути 90 ° между выводами однофазного источника питания 180 ° для запуска.
Во время работы двигатель генерирует приблизительно стандартные 3-φ, как показано выше. Мэтт Иссерштедт демонстрирует полную схему питания домашнего механического цеха.
Статический преобразователь фазы самозапускающийся. Рабочий конденсатор = 25-30 мкФ на HP. Взято из рисунка 7, Hanrahan
Поскольку статический преобразователь фазы не имеет крутящего момента, он может запускаться с конденсатором значительно меньшего размера, чем обычный пусковой конденсатор. Если он достаточно мал, его можно оставить в цепи в качестве рабочего конденсатора (см. Рисунок выше).
Однако меньшие рабочие конденсаторы обеспечивают лучшую выходную трехфазную мощность. Более того, регулировка этих конденсаторов для выравнивания токов, измеренных в трех фазах, позволяет получить наиболее эффективную машину. Однако для быстрого запуска преобразователя требуется большой пусковой конденсатор примерно на секунду. Ханрахан представляет детали конструкции.
Более эффективный статический преобразователь фазы. Пусковой конденсатор = 50-100 мкФ / л.с. Рабочие конденсаторы = 12-16 мкФ / л.Взято из рисунка 1, Hanrahan
Асинхронные двигатели с несколькими полями
Асинхронные двигателимогут содержать несколько обмоток возбуждения, например, 4-полюсную и 8-полюсную обмотки, соответствующие синхронным скоростям вращения 1800 и 900 об / мин. Подать питание на то или иное поле менее сложно, чем на повторное подключение катушек статора.
Несколько полей позволяют изменять скорость
Если поле сегментировано с выведенными выводами, его можно изменить (или переключить) с 4-полюсного на 2-полюсное, как показано выше для 2-фазного двигателя.Сегменты 22,5 ° переключаются на сегменты 45 °. Для ясности выше показана только проводка для одной фазы.
Таким образом, наш асинхронный двигатель может работать на нескольких скоростях. При переключении вышеуказанного двигателя 60 Гц с 4 полюсов на 2 полюса синхронная скорость увеличивается с 1800 до 3600 об / мин.
Q: Если двигатель приводится в движение частотой 50 Гц, каковы будут соответствующие 4-полюсные и 2-полюсные синхронные скорости?
А:
N с = 120f / P = 120 * 50/4 = 1500 об / мин (4-полюсный) N с = 3000 об / мин (2-полюсный)
Асинхронные двигатели с переменным напряжением
Скорость малых асинхронных двигателей с короткозамкнутым ротором для таких применений, как приводные вентиляторы, может быть изменена путем снижения сетевого напряжения.Это снижает крутящий момент, доступный нагрузке, что снижает скорость (см. Рисунок ниже).
Регулировка частоты вращения асинхронного двигателя с переменным напряжением
Электронное управление скоростью в асинхронных двигателях
Современная полупроводниковая электроника расширяет возможности управления скоростью. Изменяя сетевую частоту 50 или 60 Гц на более высокие или более низкие значения, можно изменить синхронную скорость двигателя. Однако уменьшение частоты тока, подаваемого на двигатель, также снижает реактивное сопротивление X L , что увеличивает ток статора.
Это может привести к насыщению магнитной цепи статора с катастрофическими результатами. На практике напряжение на двигателе необходимо уменьшать при уменьшении частоты.
Электронный частотно-регулируемый привод
И наоборот, частота привода может быть увеличена для увеличения синхронной скорости двигателя. Однако необходимо увеличить напряжение, чтобы преодолеть увеличивающееся реактивное сопротивление, чтобы поддерживать ток на уровне нормального значения и поддерживать крутящий момент.
Инвертор приближает синусоидальные волны к двигателю с помощью выходов с широтно-импульсной модуляцией. Это прерывистый сигнал, который может быть включен или выключен, высокий или низкий, процент времени включения соответствует мгновенному напряжению синусоидальной волны.
Когда для управления асинхронным двигателем применяется электроника, становится доступно множество методов управления, от простого до сложного:
- Скалярное управление: Недорогой метод, описанный выше, для управления только напряжением и частотой без обратной связи.
- Векторное управление: Также известно как векторное управление фазой. Компоненты тока статора, создающие магнитный поток и крутящий момент, измеряются или оцениваются в реальном времени для улучшения кривой крутящего момента двигателя. Это требует больших вычислений.
- Прямое управление крутящим моментом: Продуманная адаптивная модель двигателя позволяет более прямое управление магнитным потоком и крутящим моментом без обратной связи. Этот метод быстро реагирует на изменения нагрузки.
Тесла Краткое описание
- Многофазный асинхронный двигатель состоит из многофазной обмотки, встроенной в многослойный статор, и проводящей короткозамкнутой клетки, встроенной в многослойный ротор.
- Трехфазные токи, протекающие внутри статора, создают вращающееся магнитное поле, которое индуцирует ток и, следовательно, магнитное поле в роторе. Крутящий момент ротора развивается, когда ротор немного проскальзывает за вращающимся полем статора.
- В отличие от однофазных двигателей, многофазные асинхронные двигатели самозапускаются.
- Пускатели двигателей минимизируют нагрузку на линию питания, обеспечивая при этом больший пусковой крутящий момент, чем требуется во время работы.Снижение линейного тока Пускатели требуются только для больших двигателей.
- Трехфазные двигатели при запуске будут работать от однофазных.
- Статический преобразователь фазы — это трехфазный двигатель, работающий на одной фазе без нагрузки на вал, генерирующий трехфазный выходной сигнал.
- Несколько обмоток возбуждения можно перемонтировать для работы с несколькими дискретными скоростями двигателя, изменив количество полюсов.
Линейные асинхронные двигатели
Статор с обмоткой и короткозамкнутый ротор асинхронного двигателя можно разрезать по окружности и развернуть в линейный асинхронный двигатель.Направление линейного перемещения регулируется последовательностью привода фаз статора.
Линейный асинхронный двигатель предложен в качестве привода высокоскоростных пассажирских поездов. До этого момента линейный асинхронный двигатель с соответствующей системой левитации магнитного отталкивания, необходимой для плавной езды, был слишком дорогим для всех, кроме экспериментальных установок.
Тем не менее, линейный асинхронный двигатель должен заменить катапульты с паровым приводом для запуска самолетов на следующем поколении военно-морского авианосца CVNX-1 в 2013 году.Это повысит эффективность и сократит потребность в обслуживании.
СВЯЗАННЫЙ РАБОЧИЙ ЛИСТ:
Основное различие между асинхронным двигателем и синхронным двигателем | by Starlight Generator
Основное отличие состоит в том, что асинхронный двигатель является асинхронной машиной, тогда как другой, как следует из названия, является синхронной машиной.
Асинхронный двигатель:
Асинхронный двигатель состоит из статора с проводниками, размещенными в определенных положениях в зависимости от требований к фазе.Например, в трехфазном двигателе проводники размещены под пространственным углом 120 градусов. Ротор в асинхронном двигателе состоит из проводов, обычно закороченных с помощью концевых колец, или имеет внешнюю обмотку, которая может быть подключена через внешнее сопротивление. Рассмотрим случай трехфазного асинхронного двигателя. При включении питания создается вращающееся магнитное поле, называемое полем статора. Это поле вращается со скоростью Ns, называемой синхронной скоростью. Это поле индуцирует ЭДС в проводниках ротора, которая, в свою очередь, вызывает протекание тока в закороченных проводниках ротора.Протекание этого тока создает магнитное поле ротора, которое следует за полем статора. Ротор вращается со скоростью Nr. Относительная скорость между ротором и статором равна Ns-Nr, что называется скоростью скольжения. Скорость поля ротора по отношению к полю статора будет (Ns-Nr) + Nr. [Относительная скорость между статором и ротором + скорость ротора]. Таким образом, скорость поля ротора также будет Нс. Два поля вращаются с одинаковой скоростью в одном направлении, но скорость ротора никогда не может быть равна синхронной скорости.Если скорость ротора равна синхронной скорости, существует относительное движение между полем статора и проводниками ротора, следовательно, возникают ЭДС и ток, наведенные бо, и, следовательно, крутящий момент отсутствует. Таким образом, асинхронный двигатель никогда не может работать с синхронной скоростью, отсюда и название асинхронный двигатель.
Синхронный двигатель:
Статор синхронного двигателя аналогичен статору асинхронного двигателя. Ротор синхронного двигателя состоит из электромагнита, создаваемого возбуждением постоянным током.Это создает поле ротора. Трехфазное питание статора создает вращающееся магнитное поле с синхронной скоростью. Поле ротора теперь следует за полем статора с запаздыванием по углу, но вращается с синхронной скоростью. Синхронный двигатель может работать только с синхронной скоростью.
В двух словах, крутящий момент в асинхронном двигателе создается из-за относительной скорости, тогда как в синхронном двигателе производство крутящего момента происходит из-за углового отставания между двумя полями.
Основное отличие состоит в том, что асинхронный двигатель является асинхронной машиной, тогда как другой, как следует из названия, является синхронной машиной.
Асинхронный двигатель:
Скорость: Скорость асинхронного двигателя всегда меньше синхронной скорости и зависит от нагрузки, поскольку скорость уменьшается с увеличением нагрузки.
Пусковой момент: Этот тип двигателя имеет собственный пусковой момент.
Возбуждение: это машина с одиночным возбуждением, в которой обмотки статора возбуждаются от источника переменного тока.В отличие от синхронного двигателя, асинхронный двигатель работает только при отстающем коэффициенте мощности.
Эффективность: сравнительно менее эффективен.
Стоимость: Стоимость асинхронной машины меньше по сравнению с синхронным двигателем той же мощности.
Синхронный двигатель:
Скорость: Начиная с его названия «синхронный», этот двигатель работает с синхронной скоростью независимо от величины нагрузки. Скорость такого двигателя не зависит от нагрузки.
Пусковой крутящий момент: Этот двигатель не имеет самозапуска, поэтому для запуска синхронной машины должны быть предусмотрены другие вспомогательные средства.
Возбуждение: Синхронный двигатель — это машина с двойным возбуждением. Обмотка возбуждения, которая является ротором, возбуждается от источника постоянного тока, а его статор, который является обмоткой якоря, возбуждается от источника переменного тока. В дополнение к этому его можно заставить работать с коэффициентом мощности, опережающим по сравнению с отстающим коэффициентом мощности, просто путем изменения его возбуждения.
КПД: Он сравнительно более эффективен, чем асинхронный двигатель.
Стоимость: Этот тип двигателя намного дороже, чем асинхронный двигатель аналогичного номинала.
Таким образом, мы можем суммировать основные различия между асинхронной машиной и синхронной машиной:
Индукционная машина самозапускается, а синхронная — нет.
Индукционная машина работает по принципу электромагнитной индукции, аналогично трехфазным трансформаторам. Короткозамкнутая обмотка ротора действует как токопроводящая петля внутри переменного магнитного поля, где магнитное поле изменяется из-за разницы в скорости между магнитным полем ротора и статора.Синхронная машина работает по принципу возбуждения ротора с помощью постоянного тока и заставляет его вести себя как электромагнит, так что его заставляют синхронизироваться с синхронной скоростью магнитного поля.
Как мы видим, асинхронный двигатель вращается и выдает мощность на несинхронных скоростях (при наличии относительного потока, разрезающего ротор), в то время как синхронные машины предназначены для работы на синхронных скоростях.
В случае асинхронного двигателя подойдет любая скорость, отличная от синхронной, и вы получите выходной сигнал, в то время как для синхронной машины единственный способ изменить скорость — это изменить частоту.Другими словами, синхронная машина — это машина с постоянной скоростью (синхронной скоростью).
Влияние нагрузки: Увеличение нагрузки асинхронного двигателя приводит к снижению скорости. Однако в случае синхронной машины это изменение скорости не подлежит обсуждению, вместо этого система пытается вращаться с самой синхронной скоростью, но с разницей между выровненными положениями статора и оси полюса ротора, называемой углом нагрузки.
Синхронный двигатель испытывает «рыскание» при резком изменении нагрузки.Это означает, что ротор из-за инерции не может мгновенно достичь своего равновесия и колеблется в нужном положении. В любом случае, это нежелательное явление с точки зрения двигателя (так как оно вызывает большие колебания потребляемого тока). Следует отметить, что в асинхронных машинах нет рывков.
Starlight Power может предоставить синхронный генератор от 20кВт до 3000кВт с хорошим качеством и низкой ценой.
1-3-3. Двигатель переменного тока | Корпорация Nidec
Термин «двигатель переменного тока» часто кратко описывают как «двигатель переменного тока».Поэтому в этой книге мы будем следовать этому соглашению.
Двигатели переменного токаусловно подразделяются на коллекторные, синхронные и асинхронные.
Синхронные и асинхронные двигатели представляют собой двигатели переменного тока, скорость вращения которых определяется вращающимся магнитным полем.
Здесь вращающееся магнитное поле относится к явлению, когда магнитное поле, которое создается при подаче трехфазного, двухфазного или другого многофазного переменного тока к обмотке статора, вращается со скоростью, определяемой частотой кратного -фазный переменный ток (= синхронная скорость).Вращающееся магнитное поле притягивает ротор, заставляя его вращаться. Двигатели переменного тока классифицируются по разнице в способе вращения.
Двигатели переменного тока с вращающимся магнитным полем (общий термин для синхронных и асинхронных двигателей) грубо подразделяются на двигатели, которые работают от 100 В переменного тока (питание, подаваемое в дом через двухпроводные линии обслуживания), и двигатели, которые используют мощность 200 В переменного тока (распределяется между фабрики и др. по трехпроводным линиям).
Первый называется однофазным двигателем, а второй — трехфазным.
В последнее время трехфазные двигатели все чаще приводятся в действие схемой инвертора мощности с использованием полупроводникового устройства, называемого инвертором. Задача этой конфигурации драйвера состоит в том, чтобы управлять двигателем с частотой вращения и крутящим моментом, предназначенными для данного приложения, путем управления напряжением и частотой с помощью инвертора.
[3] — (1) Коммутаторный двигатель
Коллекторный двигатель — это общее описание двигателей, в которых используется коллекторный ротор, как показано на рис. 1.12.Тип, который в настоящее время все еще используется в большом количестве, — это так называемый универсальный двигатель (также называемый двигателем серии переменного тока или электродвигателем с обмоткой переменного тока).
Основное применение этого двигателя — пылесосы, электроинструменты и соковыжималки. Другими словами, он используется в областях, где требуется, чтобы двигатель вращался с высокой скоростью за счет использования однофазного источника питания переменного тока.
Слово «универсальный» здесь означает, что двигатель вращается от источника переменного или постоянного тока (то есть от двигателя переменного / постоянного тока).
В принципе, он имеет ту же конструкцию, что и двигатели серии постоянного тока, но при использовании переменного тока необходимо учитывать следующие моменты:
Наклонный тип / тип с прямой канавкойРис. 1.12 Ротор коллектора
Он имеет обмотку и коллектор, сконфигурированный с несколькими медными пластинами
.
<1> В случае постоянного тока поток статора постоянный, но в случае переменного тока он изменяется. Следовательно, необходимо уменьшить любой вихревой ток, генерируемый изменяющимся потоком, с помощью изолированного сердечника.
<2> Падения напряжения были вызваны только сопротивлением в случае постоянного тока, но с переменным током, помимо падений напряжения, вызванных сопротивлением, выходная мощность также снижается из-за ухудшенного коэффициента мощности из-за фазового сдвига в результате электромагнитной индукции .
[3] — (2) Синхронный двигатель
Под синхронным двигателем понимаются двигатели, скорость вращения которых равна синхронной скорости. К ним относятся следующие три типа:
[3] — (2) —
<1> Реактивный двигательВ реактивном двигателе используется статор с распределенной обмоткой (рис.1.13 слева) и явнополюсный ротор с короткозамкнутым ротором (рис. 1.14 справа).
Вначале он вращается как асинхронный двигатель, а затем вращается синхронно с частотой источника питания во время работы. Скорость его вращения различается в диапазоне от 50 Гц до 60 Гц. Этот двигатель обладает сравнительно большим пусковым моментом. Его еще называют реактивным двигателем.
Рис. 1.13 Статор распределенной обмотки (слева) и статор шестикатушечной сосредоточенной обмотки(справа) Инжир.1.14 (Слева) Ротор с короткозамкнутым ротором (для асинхронного двигателя с короткозамкнутым ротором)
(Справа) Ротор с короткозамкнутым ротором с выступающим полюсом (для реактивного двигателя)
В качестве проводников используются медь, латунь и алюминий.
[3] — (2) —
<2> Двигатель с гистерезисом Рис. 1.15 Ротор из полутвердой сталиСталь со слабым постоянным магнитом, не вызывающая намагничивания
В гистерезисном двигателе используется статор с распределенной обмоткой (рис.1.13 Слева) и ротор из полутвердой стали (рис. 1.15).
Поскольку этот двигатель вращается с использованием гистерезисных характеристик, он имеет небольшие неравномерности вращения или вибрации. Кроме того, поскольку нет разницы между пусковым и остановочным моментами, в идеале он должен работать в условиях постоянной нагрузки. Этот мотор могут выпускать только производители, у которых есть специальное кольцо гистерезиса.
[3] — (2) —
<3> Двигатель индукционного типаПринцип работы синхронных двигателей индукторного типа заключается в синхронизации движения ротора с частотой тока, подаваемого на катушку статора (электромагнита), и преобразование входной мощности во вращательное движение посредством многократного притяжения и отталкивания.
Другими словами, скорость вращения ротора будет обратной целому числу скорости вращения (синхронной скорости), однозначно определяемой частотой тока. Двигатели можно разделить на два типа в зависимости от конструкции ротора.
- ・ Электродвигатели с кулачковыми полюсами
- ・ Гибридные шаговые двигатели (медленно-синхронные двигатели).
Электродвигатели с кулачковыми полюсами с различными номинальными скоростями доступны за счет комбинации конструкции двигателя и головки редуктора.
Электродвигатели с кулачковыми полюсами используются в различных приложениях, включая игровые автоматы (автоматы для игры в пинбол), копировальные машины, драйверы камер видеонаблюдения, записывающие счетчики, автоматические шторы и устройства открытия / закрытия клапанов. Гибридные шаговые двигатели в основном используются в производственном оборудовании.
[3] — (3) Асинхронный двигатель
Обычно его называют асинхронным двигателем, но иногда его называют асинхронным двигателем.
Это общее название двигателей, скорость вращения которых немного ниже синхронной скорости.Существуют следующие три типа. В любом случае используется статор с распределенной обмоткой (рис. 1.13 слева).
[3] — (3) —
<1> Асинхронный двигатель с короткозамкнутым ротором Рис. 1.16 Когда железо растворяется в азотной кислоте, остается только алюминиевая клетка.Слева находится ротор асинхронного двигателя с короткозамкнутым ротором типа
, а справа — ротор реактивного двигателя
.
Ротор с короткозамкнутым ротором (рис.1.14 слева) используется для асинхронного двигателя с короткозамкнутым ротором.
К этому типу относятся силовые двигатели общего назначения для промышленного использования. Когда ротор с короткозамкнутым ротором погружают в азотную кислоту для растворения содержания железа, остается только алюминиевая «клетка», как показано на рис. 1.16. Можно аккуратно отрегулировать характеристическую кривую, отрегулировав форму и материал клеточного проводника ротора.
[3] — (3) —
<2> Вихретоковый двигатель Инжир.1.17 Ротор из мягкой сталиОсновной материал — цилиндрическая масса из железа.
Для вихретоковых двигателей
Ротор из мягкой стали (рис. 1.17) используется для роторов вихретоковых двигателей. Он создает большой крутящий момент в начале работы, который падает с увеличением скорости.
[3] — (3) —
<3> Асинхронный двигатель с фазным ротором Рис. 1.18 Обмоточный роторОн оснащен тремя контактными кольцами для подачи энергии на ротор
с помощью щетки.
Роторы с обмотками (рис. 1.18) используются в асинхронных двигателях с фазным ротором. Характеристики двигателя можно изменить с помощью переменного резистора, подключенного через контактные кольца. Этот ротор специально используется в больших двигателях.
[3] — (3) —
<4> Однофазный асинхронный двигательМы описали многофазные (трехфазные) асинхронные двигатели в пунктах с <1> по <3> выше.
В нашей повседневной жизни источником питания, с которым большинство людей знакомо, является однофазный источник питания переменного тока.Поэтому удобны практические двигатели, работающие на однофазном переменном токе. Однофазный асинхронный двигатель соответствует этому требованию. Небольшие двигатели этого типа с диапазоном мощности от нескольких ватт до нескольких сотен ватт широко используются в быту, небольших промышленных и сельскохозяйственных приложениях. Конденсаторные двигатели и однофазные асинхронные двигатели с экранированными полюсами являются типичными однофазными асинхронными двигателями.
[3] — (3) —
<4> -a) Конденсаторный двигатель Инжир.1.19 Соотношение фаз конденсаторного двигателяРис. 1.20 Конденсаторный двигатель промышленного назначения
Как показано на рис. 1.19, конденсаторные двигатели конфигурируются путем включения конденсатора в фазу A, так что VA становится ведущей фазой для VM.
Конденсаторные двигатели подразделяются на двигатели с конденсаторным пуском, в которых конденсатор C вставляется только при запуске, двигатели с конденсаторным приводом, в которых постоянный конденсатор C остается вставленным с момента запуска и далее, и двигатели с двоичным конденсатором, которые уменьшают емкость путем переключения конденсатора, когда двигатель переходит в устойчивое рабочее состояние.
Помимо того, что конденсаторный двигатель предпочтительно используется в бытовых приборах со сравнительно меньшими пусковыми моментами, в промышленности, конденсаторный двигатель используется в небольших приводах ленточных конвейеров и машинах FA (автоматизация производства) из-за простоты использования и высокой экономической эффективности.
[3] — (3) —
<4> -b) Однофазный асинхронный двигатель с расщепленными полюсамиОднофазный асинхронный двигатель с экранированными полюсами представляет собой асинхронный двигатель с короткозамкнутой вспомогательной обмоткой, расположенной в положении, смещенном от основной обмотки на электрический угол менее 90 °.
Вспомогательная обмотка индуцирует напряжение, используя эффект трансформатора основной обмотки для подачи тока короткого замыкания, и создает вращающееся магнитное поле, используя магнитодвижущую силу вспомогательной и основной обмоток.
Будучи менее эффективным из-за потерь, возникающих в затемненной катушке, этот двигатель используется в вентиляторах и других устройствах малой мощности из-за своей простой конструкции.
Асинхронный двигатель с обмоткой ротора Экономия
Асинхронные двигатели с большим обмоточным ротором (WRIM) уже несколько десятилетий используются в некоторых отраслях промышленности.В цементной и горнодобывающей промышленности мощные WRIM используются на больших мельницах, где они имеют преимущество в виде контролируемых пусковых характеристик и регулируемой скорости. Эти двигатели также используются в больших насосах в водопроводной и канализационной промышленности.
WRIM имеет трехфазный статор с обмоткой, который обычно подключается непосредственно к системе питания. Ротор имеет трехфазную обмотку с тремя выводами, подключенными к отдельным контактным кольцам, которые обычно подключаются к жидкостному реостату или группе резисторов.Реостат используется для запуска и может быть отключен, когда двигатель наберет нужную скорость. Изменяя сопротивление ротора с помощью реостата, можно изменять скорость двигателя. В прошлом мощность, рассеиваемая реостатом, терялась в виде тепла; однако, используя привод с регулируемой скоростью вместо реостата, мощность скольжения может быть восстановлена и возвращена в сеть, таким образом, экономя энергию. Кроме того, используя привод для увеличения мощности, снимаемой с ротора, можно снизить скорость двигателя. В качестве бонуса, подавая мощность на ротор через привод, двигатель может работать выше синхронной скорости.Скорость, конечно, должна быть в пределах проектных ограничений двигателя.
В системе восстановления мощности скольжения используется современный низковольтный привод с широтно-импульсной модуляцией. Эта новая реализация основана на стандартной линейке низковольтных приводов асинхронных двигателей TMEIC, используемых в обрабатывающих отраслях, таких как обработка металлов и производство бумаги. Оборудование очень надежное и знакомое и подходит для новых или существующих двигателей. Мощность скольжения представляет собой низкое напряжение и составляет лишь небольшую часть от общей мощности двигателя, поэтому требуемый привод имеет малую мощность и более низкую стоимость, чем полноразмерный привод среднего напряжения.
Расчеты для WRIM мощностью 5000 л.с., работающего на 90% полной скорости, показывают, что рекуперированная энергия составляет 360 кВт на сумму более 200 000 долларов в год.