
Синхронный электродвигатель: характеристики, устройство и принцип действия
Синхронный электродвигатель – это устройство, преобразующее электрическую энергию в механическую. Его также можно использовать в качестве генератора. Чаще всего он применяется в компрессорах, прокатных станках, поршневых насосах и другом подобном оборудовании. Рассмотрим принцип действия синхронного электродвигателя, его характеристики и свойства.
Устройство синхронного электродвигателя
Строение агрегата данного вида типично. Двигатель состоит из:
- Неподвижной части (якорь или статор).
- Подвижной части (ротор или индуктор).
- Вентилятора.
- Контактных колец.
- Щеток.
- Возбудителя.
Статор представляет собой сердечник, состоящий из обмоток, который заключен в корпус. Индуктор комплектуется электромагнитами постоянного тока (полюсами). Конструкция индуктора может быть двух видов – явнополюсная и неявнополюсная.
Частота вращения ротора в синхронном двигателе равна частоте вращения магнитного поля. Независимо от подключаемой нагрузки частота ротора неизменна, так как число пар полюсов магнитного поля и ротора совпадают. Их взаимодействие обеспечивает постоянную угловую скорость, не зависящую от момента, приложенного к валу.
Принцип работы синхронного электродвигателя
Самые распространенные типы такого рода агрегатов – однофазный и трехфазный. Принцип работы синхронного электродвигателя в обоих случаях примерно одинаков. После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения. Направление электромагнитного момента меняется дважды за время одного изменения напряжения. При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
В трехфазном устройстве проводники расположены под определенным углом относительно друг друга. В них возбуждается вращающееся с синхронной скоростью электромагнитное поле.
Разгон двигателя может осуществляться в двух режимах:
- Асинхронный. Обмотки индуктора замыкаются с помощью реостата. Вращающееся магнитное поле, возникающее при включении напряжения, пересекает короткозамкнутую обмотку, установленную на роторе. В ней индуцируются токи, взаимодействующие с вращающимся полем статора. По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
- С помощью вспомогательного двигателя. Для этого синхронный двигатель механически соединяется со вспомогательным (двигателем постоянного тока либо трехфазным индукционным двигателем). Постоянный ток подается только после того, как вращение двигателя достигает скорости, близкой к синхронной. Магнитное поле замыкается, и связь со вспомогательным двигателем прекращается.


Характеристики синхронного электродвигателя
Хотя асинхронные двигатели считаются более надежными и дешевыми, их синхронные «собратья» имеют некоторые преимущества и широко применяются в различных областях промышленности. К отличительным характеристикам синхронного электродвигателя можно отнести:
- Работу при высоком значении коэффициента мощности.
- Высокий КПД по сравнению с асинхронным устройством той же мощности.
- Сохранение нагрузочной способности даже при снижении напряжения в сети.
- Неизменность частоты вращения независимо от механической нагрузки на валу.
- Экономичность.
Синхронным двигателям также присущи некоторые недостатки:
- Достаточно сложная конструкция, делающая их производство дороже.
- Необходимость источника постоянного тока (возбудителя или выпрямителя).
- Сложность пуска.
- Необходимость корректировать угловую частоту вращения путем изменения частоты питающего напряжения.

Однако в некоторых случаях использование синхронных двигателей предпочтительнее:
- Для улучшения коэффициента мощности.
- В длительных технологических процессах, где нет необходимости в частых запусках и остановках.
Таким образом, «плюсы» двигателей такого типа значительно превосходят «минусы», поэтому на данный момент они высоко востребованы.
Изучив синхронный двигатель, устройство и принцип его действия и учтя условия, в которых он будет эксплуатироваться, вы сможете быстро и с легкостью подобрать оптимально подходящий для ваших целей тип агрегата (защищенный, закрытый, открытый) и использовать его с максимальной эффективностью.
Error
Skip to main content- English (en) Русский (ru) Татар (tt) Deutsch (de) English (en) Français (fr) Vietnamese (vi) 日本語 (ja) 简体中文 (zh_cn)
- You are currently using guest access (Log in)
ЭЭиСТ
General
Topic 1
Topic 3
что это такое, принцип действия, устройство, технические характеристики, фото и видео
Автор Aluarius На чтение 7 мин. Просмотров 887 Опубликовано
Просмотров 887 Опубликовано
То, что асинхронные двигатели сегодня используются во всех отраслях промышленности и сельского хозяйства, необходимо поклониться русскому инженеру М.О. Доливо-Добровольскому. Именно он в 1889 году (а точнее 8 марта) изобрел трехфазный асинхронный двигатель, который преобразовывает электроэнергию в энергию механическую (вращения). Это, по сути, стало прорывом в технике и началом новой эры.
Самое главное, что электрические моторы данного типа оказались очень надежными, их производство достаточно простое, что влияет на небольшую себестоимость изделия. Плюс несложная конструкция, которая легко поддается не только производству, но и ремонту. Если обратиться к статистическим данным, то по ним можно сделать вывод, что асинхронные двигатели являются самыми производимыми в мире. На их счет приходится до 90% выпуска. Так что цифры говорят сами за себя.
Но почему эти приборы названы асинхронными? Все дело в том, что частота вращения магнитного поля статора всегда больше вращения ротора. Кстати, у электродвигателей этого типа принцип работы основан именно на вращении магнитного поля.
Принцип работы двигателя
Чтобы понять, как работают электродвигатели асинхронные трехфазные, необходимо провести один несложный эксперимент. Для этого вам понадобиться обычный магнит подковообразного типа и медный стержень. При этом магнит надо хорошо закрепить к рукоятке, с помощью которой его можно крутить на одном месте вокруг своей оси. Медный стержень закрепляется в подшипниках и устанавливается в пространство между концами (полюсами) магнита-подковы. То есть, стержень оказывается как бы внутри магнита, а, точнее сказать, внутри его плоскости вращении.
Принцип работы трехфазного асинхронного двигателяТеперь надо просто вращать магнитное устройство за ручку. Лучше по часовой стрелке. Так как между полюсами есть магнитное поле, то оно также будет вращаться. При этом поле будет пересекать или рассекать своими силовыми линиями медный стержень-цилиндр. И тут включается закон электромагнитной индукции. То есть, внутри медного стержня начнут возникать вихревые токи. Они, в свою очередь, начнут образовывать свое собственное магнитное поле, которое будет взаимодействовать с основным магнитным полем.
При этом поле будет пересекать или рассекать своими силовыми линиями медный стержень-цилиндр. И тут включается закон электромагнитной индукции. То есть, внутри медного стержня начнут возникать вихревые токи. Они, в свою очередь, начнут образовывать свое собственное магнитное поле, которое будет взаимодействовать с основным магнитным полем.
При этом стержень начнет вращаться в ту же сторону, что и магнит. И вот тут возникает один момент, который также лежит в принципе работы электродвигателя. О нем было уже упомянуто. Если скорость вращения стержня будет такое же, как у магнита, то их силовые линии пересекаться не будут. То есть, вращения не будет в виду отсутствия вихревых токов.
И еще пару нюансов:
- Магнитное поле вращается с той же скоростью, что и сам магнит, поэтому скорость называют синхронной.
- А вот стержень вращается с меньшей скоростью, поэтому ее и называют асинхронной. Отсюда, в принципе, название и самого электрического мотора.
Внимание! Разница скоростей вращения магнитных полей не очень большая.
 Эту величину называют скольжением.
Эту величину называют скольжением.Кстати, определить величину скольжения несложно, для этого необходимо воспользоваться формулой:
S=n-n1/n, где
- S – это величина скольжения;
- n – скорость вращения магнита;
- n1 – скорость вращения ротора.
Устройство двигателя
Конечно, показанное выше устройство назвать электродвигателем никак нельзя, потому что для примера был использован магнит, которого в моторе просто нет. Поэтому необходимо создать такую конструкцию, в которой электрический ток создавал бы это самое магнитное поле. К тому же оно должно еще и вращаться. Русскому ученому это оказалось под силу с помощью трехфазного переменного тока.
Поэтому в конструкции трехфазного асинхронного двигателя установлены три обмотки, расположенные относительно друг друга под углом в 120º. Каждая обмотка подсоединена к фазному контуру трехфазной сети переменного тока. Обмотки закрепляются к статору, который собой представляет металлический сердечник в виде полого корпуса.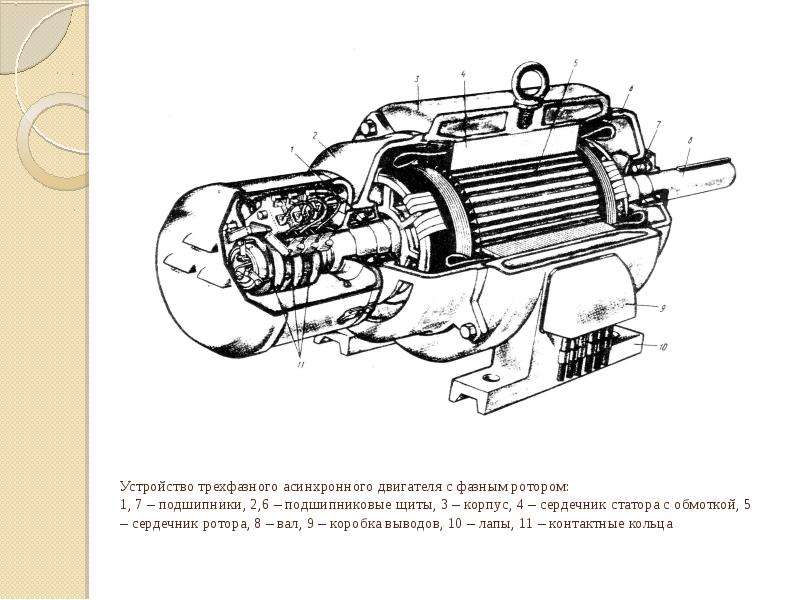 Они же закрепляются к полюсам сердечника.
Они же закрепляются к полюсам сердечника.
Внимание! У каждой обмотки два свободных конца. Один соединяется с фазой сети, второй с двумя другими концами двух других обмоток, то есть, в единый контур.
Внутри полого сердечника на подшипниках закрепляется ротор. По сути, это тот же стержень-цилиндр. Ниже показана схема подключения обмоток и расположение ротора.
Как только электрический ток начинает подаваться на обмотки, образуется вращающееся магнитное поле, которое воздействует на ротор, заставляя его вращаться тоже.
Как работает
Чтобы понять принцип действия трехфазного асинхронного двигателя, необходимо рассмотреть график его работы. Чтобы облегчить данную задачу, предлагаем рассмотреть схему, расположенную ниже.
- Итак, позиция «А». В ней на первом полюсе фаза равна нулю, второй полюс является северным, то есть, отрицательным, в третьей фазе положительный заряд. Поэтому ток движется по стрелкам, указанным на рисунке. Тот, кто забыл школьную программу физики, напоминаем, что движение магнитного поля действует по правилу правой руки. Значит, вращение его будет направлено от севера к югу, то есть, от второй катушки (обмотки) к третьей.
- Позиция «Б». Теперь ноль расположен на второй обмотке, на первой юг (плюс), на третьей север (минус). То есть, магнитный поток будет теперь направлен от катушки №3 на катушку №1. Получается так, что полюсы сместились на 120º.
- В позициях «В» и «Г» произошли точно такие же сдвиги полюсов на 120º.
 В ней на первом полюсе фаза равна нулю, второй полюс является северным, то есть, отрицательным, в третьей фазе положительный заряд. Поэтому ток движется по стрелкам, указанным на рисунке. Тот, кто забыл школьную программу физики, напоминаем, что движение магнитного поля действует по правилу правой руки. Значит, вращение его будет направлено от севера к югу, то есть, от второй катушки (обмотки) к третьей.
В ней на первом полюсе фаза равна нулю, второй полюс является северным, то есть, отрицательным, в третьей фазе положительный заряд. Поэтому ток движется по стрелкам, указанным на рисунке. Тот, кто забыл школьную программу физики, напоминаем, что движение магнитного поля действует по правилу правой руки. Значит, вращение его будет направлено от севера к югу, то есть, от второй катушки (обмотки) к третьей.Смена полярности создает вращение магнитного потока, который в свою очередь увлекает за собой ротор. Последний начинает вращаться. Как было сказано выше, из энергии электрической получается энергия вращения (механическая).
Внимание! Если поменять местами вторую и третью обмотку, то вращение электродвигателя начнется в противоположную сторону.
 Конечно, сами обмотки не переставляются, а просто производится смена подключения к разным фазам сети.
Конечно, сами обмотки не переставляются, а просто производится смена подключения к разным фазам сети.Нами была рассмотрена конструкция электродвигателя асинхронного трехфазного с тремя обмотками на статоре, в котором используется двухполюсная схема магнитного поля. Число его оборотов вращения равна числу колебаний электрического тока в минуту. Если в сети переменного тока число колебания в секунду равно 50 Гц, то за минуту это значение станет 3000 (об/мин).
Но в статор можно заложить не три обмотки. К примеру, можно установить шесть или десять. При этом магнитное поле станет четырехполюсным и шестиполюсным соответственно. При этом измениться и скорость вращения ротора. В первом случае она будет равна: (50X60)/2=1500 об/мин. Во втором: (50X60)/3=1000 об/мин.
Выше нами уже упоминалось, что существует определенное отставание вращения ротора от вращения магнитного поля. Правда, это значение незначительно. К примеру, в холостом режиме работы данный показатель будет всего лишь 3%, при действующих нагрузках 5-7%. Даже 7% – значение небольшое, что и является одним из достоинств асинхронного двигателя.
Даже 7% – значение небольшое, что и является одним из достоинств асинхронного двигателя.
Как использовать
К сожалению, не во всех частных домах есть трехфазное напряжение. Поэтому подключение трехфазного асинхронного двигателя к однофазной сети производится через конденсаторы определенной емкости. Обычно расчет ведется в соответствии: на 1 кВт мощности 70 мкФ емкости. Но есть в этом деле еще одна проблема – невозможность регулировать скорость вращения ротора. Поэтому специалисты рекомендуют подключить к мотору регулятор частоты вращения трехфазных асинхронных двигателей.
Подключение трехфазного двигателя к однофазной сети- Во-первых, установив его, отпадает необходимость устанавливать конденсаторы.
- Во-вторых, с помощью данного устройства выравнивается мощность электродвигателя до номинальной.
- В-третьих, можно регулировать частоту вращения, а также повышать ее больше номинала.
- В-четвертых, можно регулировать пусковой момент.
Эти устройства сегодня продаются в специализированных магазинах, но нет проблем их сделать и своими руками.
Ротор
По конструкции ротора электродвигатели асинхронные делятся на две группы:
- С фазным ротором.
- Короткозамкнутым.
Первый вариант – это двигатели с большой мощностью, которым необходим большой пусковой момент. В конструкции их ротора установлены контактные кольца. Второй вариант – это конструкция, в пазы которой заложены медные стержни. Это типичные электродвигатели, простые и дешевые. Но у них есть пара недостатков: большой пусковой ток и слабое усилие при начале вращения.
Технические характеристики
На что обычно надо обратить внимание, выбирая электродвигатели? Технических характеристик, в принципе, немного. Это мощность, измеряемая в кВт, скорость вращения ротора в об/мин. Все остальные технические характеристики не столь важны именно для выбора. Хотя, к примеру, масса изделия может помочь рассчитать нагрузку на подставку или монтажную раму.
Заключение по теме
Итак, были рассмотрены асинхронные электродвигатели – электрическое оборудование, которое нередко используется в частных домах для бытовых нужд. Устройство и принцип работы мотора вам теперь понятно, а вот как правильно подключить двигатель к однофазной сети, читайте в другой статье.
Устройство и принцип работы мотора вам теперь понятно, а вот как правильно подключить двигатель к однофазной сети, читайте в другой статье.
устройство и принцип работы, преимущества и недостатки механизма, особенности пуска
Асинхронный двигатель — это асинхронное устройство, предназначенное для преобразования с минимальными потерями электрической энергии переменного тока в механическую энергию, необходимую для запуска работающих на этом двигателе приборов. Чтобы иметь более ясное представление о принципе работы асинхронных двигателей, необходимо познакомиться с устройством этого прибора, а также узнать, какие типы этих машин существуют на сегодняшний день.
История изобретения
Принцип магнетизма вращения был открыт еще в 1824 году французским физиком Д. Ф. Арагоном. В результате своих экспериментов, ученый обнаружил, что можно привести в движение медный диск, закрепленный на вертикальную ось, воздействуя на него постоянным магнитом.
Работу над трудами Арагона продолжил английский физик Уильям Бейли в 1879 году. В своих экспериментах он воздействовал на медный диск четырьмя электромагнитами, подключенными к источнику постоянного тока.
В своих экспериментах он воздействовал на медный диск четырьмя электромагнитами, подключенными к источнику постоянного тока.
Однако законченную формулировку этому явлению дали в 1888 году итальянский физик Феррарис и Никола Тесла, работавшие независимо друг от друга.
В 1888 году Тесла представил миру свой первый опытный образец асинхронного двигателя. Однако широкое применение он не получил из-за низких технических показателей в момент запуска двигателя. Современная конструкция вращающего трансформатора, в том виде, в котором мы знаем его сегодня, была разработана французским инженером П. Бушеро, разработавшем аналог современного асинхронного двигателя.
Устройство асинхронного двигателя
Любой электродвигатель, независимо от мощности и габаритов, состоит из следующих элементов:
- Статор;
- Ротор;
- Катушки статора и ротора;
- Магнитопровод.
В основе устройства асинхронных двигателей лежит правило левой руки буравчика, которое демонстрирует взаимодействие магнитного поля и проводника, а также задает направление вращения электродвигателя.
Вторым законом, заложенным в устройство и работу вращающих трансформаторов, является закон электромагнитной индукции Фарадея, который гласит:
- Электродвижущая сила, или сокращенно ЭДС, наводится в обмотке устройства, но электромагнитный поток постоянно изменяется во времени;
- Электродвижущая сила изменяется в зависимости от изменения во времени электромагнитного потока.
- ЭДС и электрический ток имеют противоположное направление движения.
Принцип работы асинхронного двигателя
Принцип работы и скольжения в асинхронных машинах переменного тока предельно прост. В электрической обмотке статора, при подаче на нее напряжения, создается магнитное поле. При подаче напряжения переменного тока происходит изменения магнитного потока, создаваемого статором.
Таким образом, магнитное поле статора изменяется и магнитные потоки поступают на ротор, что приводит его в действие и заставляет вращаться. Однако для обеспечения асинхронной работы статора и ротора необходимо чтобы магнитный поток и напряжение статора было равно по величине переменному току.
Это обеспечит возможность ее работы исключительно от источника переменного тока.
Область применения индукционных генераторов достаточно широка. Их используют для обеспечения резервным источником электрического питания небольших магазинчиков и частных домов. Это одни из самых дешевых и простых в установке и эксплуатации типов радиаторов.
В последние годы все активнее индукционные генераторы применяются во многих странах по всему миру, в которых существует проблема, связанная с постоянными перепадами напряжения в электрической сети.
В процессе работы генератора, ротор приводится в движение благодаря дизельному двигателю небольшой мощности, подключенному к асинхронному генератору.
Принцип вращения ротора
Принцип работы ротора основан на электромагнитном законе Фарадея. Вращается он благодаря воздействию электродвижущей силы, возникающей в результате взаимодействия магнитных потоков и обмотки ротора.
На деле это выглядит так: между статором, ротором и их обмотками существует некий зазор, сквозь который проходит вращающийся магнитный поток.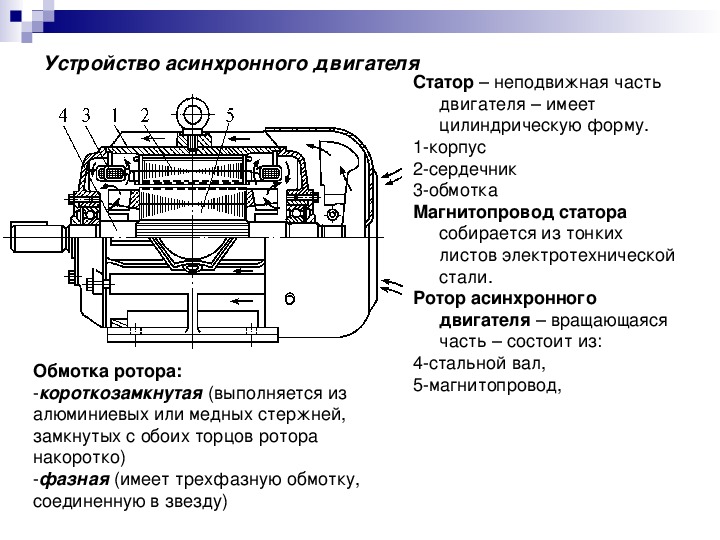
В результате этого в проводниках ротора возникает напряжение, которое и является причиной образования ЭДС.
Двигатели с замкнутой цепью роторных проводников работают немного иначе. В этих типах двигателей используются короткозамкнутые роторы, в которых направление движения тока и электродвижущей силы задается правилом Ленца, согласно которому ЭДС противодействует возникновению тока. Вращение ротора происходит благодаря магнитному потоку, движущемуся между ним и неподвижным проводником.
Таким образом, для уменьшения относительной скорости, ротор начинает синхронное вращение с магнитным потоком на обмотке статора, стремясь к вращению в унисон. При этом частота электродвижущей силы ротора равняется частоте питания статора.
Гребневые асинхронные двигатели
Принцип подключения асинхронных двигателей
В любой момент времени работу асинхронного двигателя можно остановить. Для этого достаточно всего — лишь поменять местами любые два вывода статора.
Это может понадобиться при возникновении различного рода чрезвычайных ситуаций.
После этого происходит противофазное торможение, происходящее в результате изменения направления вращающегося потока, что прекращает подачу электропитания ротора.
Чтобы избежать возникновения такой ситуации, в однофазных асинхронных двигателях используют специальные конденсаторные устройства, подключающиеся к пусковой обмотке двигателя.
Однако перед использованием этих устройств, необходимо рассчитать оптимальные для работы параметры.
При этом следует учитывать, что мощность конденсаторов, используемых в одно- или двухфазных электрических машинах переменного тока, должна равняться мощности самого двигателя.
Принцип муфты
Рассматривая технические характеристики вращающихся трансформаторов переменного тока, применяемых в производстве промышленного оборудования, и их принцип действия, можно обнаружить аналогию с принципом работы вращающейся муфты механического сцепления.
Значение крутящего момента на валу привода должно соответствовать величине этого значения на ведомом валу. Помимо этого очень важно понимать, что эти два момента идентичны друг другу.
Поскольку линейный преобразователь приводится в движение под воздействием терния между дисков, находящихся внутри муфты.
Электромагнитная муфта сцепления
Плюсы и минусы асинхронных двигателей
Вращающие трансформаторы получили большую популярность благодаря своей универсальности, позволяющей использовать их во многих отраслях. Однако эти механизмы, как и любые другие устройства, имеют свои достоинства и недостатки. Давайте подробнее разберемся с каждым из них.
Достоинства вращающих трансформаторов переменного тока:
- Простая конструкция двигателя;
- Дешевая себестоимость приборов;
- Высокие эксплуатационные характеристики;
- Простое управление конструкцией;
- Возможность работы в тяжелых условиях.
Высокая производительность асинхронных двигателей переменного тока достигается благодаря высокой мощности, потери которой минимизированы благодаря отсутствию трения в процессе их работы.
К недостаткам вращающих трансформаторов можно отнести:
- Потеря мощности при изменении скорости.
- Снижение крутящего момента при увеличении нагрузки.
- Низкая мощность в момент запуска.
Источник: http://AutoBrains.ru/others/printsip-deystviya-asinhronnogo-dvigatelya/
Асинхронный электродвигатель: плюсы и минусы
Электродвигатель – это основной компонент различных видов промышленного оборудования. Например, после комплектации электродвигателем насоса изделие переходит в стадию агрегата. Каждый электродвигатель имеет конкретное условное обозначение.Оно формулируется в зависимости от таких параметров, как серия, вид, высота оси вращения, длина сердечника статора, установочный размер по длине станины, климатическое исполнение, число полюсов, исполнение двигателя по способу защиты от окружающей среды, категория размещения при эксплуатации, конструктивное исполнение, режим работы. Каждый производитель рано или поздно задаётся вопросом, какой именно двигатель ему предпочесть. Сегодня на рынке представлен большой ассортимент синхронных и асинхронных двигателей. Многие отдают предпочтение последним. В чём же их особенности?
Сегодня на рынке представлен большой ассортимент синхронных и асинхронных двигателей. Многие отдают предпочтение последним. В чём же их особенности?
Устройство асинхронного двигателя
В конце 19 века история человечества ознаменовалась одним из важнейших технических открытий, которое во многом определило ход технического прогресса. 1889 год ознаменовался изобретением трёхфазного асинхронного двигателя с короткозамкнутым ротором и двигателя с фазным ротором.
Их создателем стал русский инженер и учёный С того момента именно трёхфазные электромоторы – самое распространённое оборудование данного класса в промышленности. Около 90% всех производителей в мире отдают предпочтение именно этому двигателю, а это во многом связано именно с покупательским интересом.
Можно смело утверждать, что именно этот тип двигателя ответственен за технический переворот в мировой промышленности.
Купить асинхронный электродвигатель
Заказать и купить асинхронный электродвигатель вы можете на нашем сайте. Актуальные цены на асинхронные электродвигатели также всегда доступны в разделе «Цены» нашего сайта.
Актуальные цены на асинхронные электродвигатели также всегда доступны в разделе «Цены» нашего сайта.
Асинхронный двигатель преобразует электрическую энергию в механическую. Его название происходит от слова «не одновременный». В данном случае это указывает на больший показатель частоты вращения магнитного поля по сравнению с частотой вращения ротора.
Однако для того, чтобы разобраться в системе его работы, необходимо подробнее изучить устройство. Три главные части двигателя – ротор, статор и корпус (кожух). Корпус выполняет защитную функцию. Он позволяет избежать появления повреждений на статоре и роторе.
Также на нем крепится подвижная и неподвижная часть асинхронного двигателя.
Статор – это неподвижная часть двигателя. Название элемента произошло от английского stator, которое указывает на латинское – sto – стоять. Его конструкция представлена станиной и магнитопроводом. С помощью пресса магнитопровод прикрепляется к станине и создаёт электромагнитное ядро.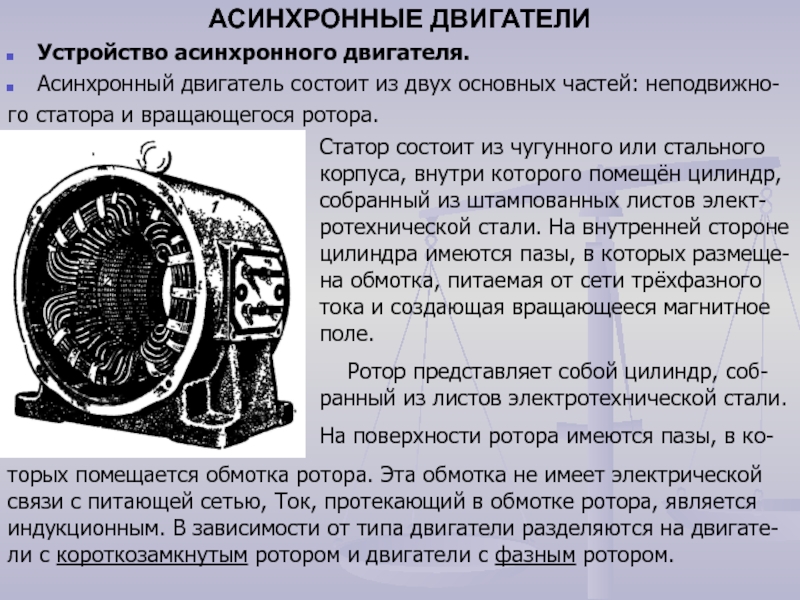
Именно ядро отвечает за намагничивание всей машины и образует магнитное поле, которое непрерывно вращается. Конструкция представляет собой тонкие листы, штампованные из электротехнической листовой стали. Благодаря особому креплению листов магнитопровод имеет пазы и зубцы статора.
В целом магнитопровод не оказывает большое магнитное сопротивление магнитному потоку, а значит, последний увеличивается в асинхронном двигателе. Между статором и ротором имеется разделяющий их воздушный зазор. Ещё один элемент статора – это шихтованный сердечник. Он делается из статорных пластин.
Такое строение позволяет уменьшить потери от вихревых токов. Толщина электротехнической стали, которая используется в производстве данного элемента, колеблется между 0,28 и 1 мм. Листы изолирует друг от друга окалина. Если высота оси вращения сердечника – 50-132 мм, то в производстве применяется холоднокатаная нелегированная сталь.
Если высота оси больше (160-250 мм), то используется холоднокатаная слаболегированная сталь. Для двигателей с высотой оси вращения 280-355 мм подходит горячекатаная сталь. Если высота оси вращения двигателя 50-60 мм, то их можно скрепить скобами или сваркой.
Для двигателей с высотой оси вращения 280-355 мм подходит горячекатаная сталь. Если высота оси вращения двигателя 50-60 мм, то их можно скрепить скобами или сваркой.
А при высоте оси вращения 200-250 мм для скрепления используются исключительно скобы. Если высота оси вращения ещё больше, то листы сердечников соединяются с помощью пресса и кольцевых шпонок – именно так и образуется магнитопровод.
Соответственно, подвижный элемент асинхронного двигателя – это ротор. Чаще всего сегодня можно увидеть обмотку ротора под названием «беличья клетка».
Такое наименование системы связано с конструкцией короткозамкнутых колец, которые по внешнему виду напоминают колёса в беличьих клетках. Обмотка ротора состоит из латунных или медных стержней. Они вбиваются в пазы, а стержни привариваются к короткозамкнутым кольцам на торцах.
Серийные асинхронные двигатели, имеющие малую или среднюю мощность, делаются из алюминиевого сплава, обработанного под давлением.
Если у двигателя фазный ротор, то его обмотка по конструкции похожа на обмотку статора. Начало обмотки соединяется и изолируется.
Начало обмотки соединяется и изолируется.
Концы обмотки припаяны к контактным кольцам, к которым при желании можно подсоединить пуско-регулирующий реостат.
Так цепь ротора обретает дополнительное сопротивление, а значит у пользователя есть возможность регулировки частоты вращения и снижения пусковых токов.
Стандарты электромоторов
Чаще всего в зарубежной промышленности по установочным и присоединительным размерам выпускаются электромоторы стандартов CENELEK, DIN и IEC. В отечественной промышленности также можно встретить такие стандарты. При этом во втором случае хорошо сохраняется качество производства.
Например, по стандарту DIN изготавливаются такие серии двигателей, как IMM, RA, РА, AIS, ИММ, Y2, М2АА, АИС. Маркировку АИС можно встретить на отечественных электромоторах. В то же время сделан он по стандарту DIN. Основное отличие отечественного двигателя стандарта ГОСТ и импортных асинхронных двигателей в размере.
Двигатели ГОСТ, имея аналогичную мощность и частоту вращения вала, будут меньше по габаритам.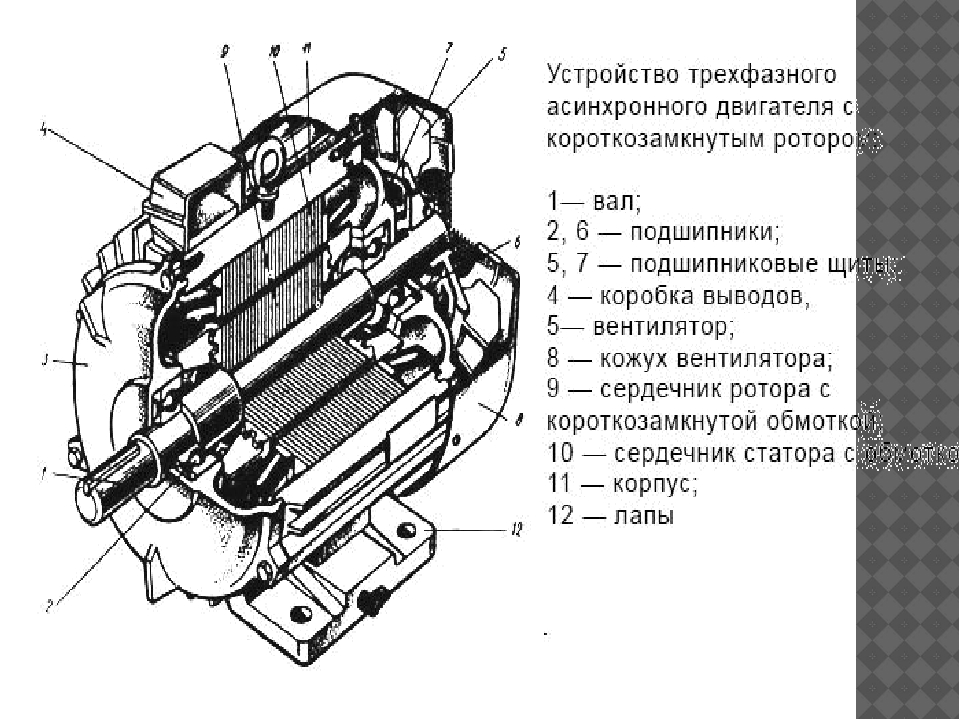 А материалы и принцип работы будут одинаковы.
А материалы и принцип работы будут одинаковы.
Многие покупатели отдают предпочтение европейским стандартам по причине возможности широкого выбора. Производства асинхронных двигателей сосредоточены в Германии, Италии, Австрии, Швеции и других европейских странах.
Также многим покупателям принципиально важно найти электродвигатели, чтобы применять их в узкоспециальных средах: для постоянного тока, тельферов, приводов станков с ЧПУ. Хотя некоторые отдают предпочтение отечественным электромоторам, так как купить их можно гораздо быстрее: не понадобится тратить время на заказ и доставку.
Кроме того, если электромотор вышел из строя или необходима замена деталей, то найти их будет гораздо проще.
В целом если Вы решили купить электродвигатель, то необходимо знать такие параметры, как обороты на выходе, мощность, габарит, посадочный размер по лапам или размер фланца, диаметр вала. Остальную информацию по выбору Вам подскажет консультант в любой компании.
Применение асинхронного электродвигателя
Электродвигатель асинхронный нашёл широкое применение в промышленности благодаря простоте в обслуживании и эксплуатации, низкой стоимости, высокой надёжности и простой конструкции при этом.
Однако у таких моделей есть и недостатки: они отличаются малым пусковым и большим спусковым током, плохо переносят изменения параметров сети, чтобы скорость на них регулировалась плавно, нужно использовать преобразователь частоты. Потребление реактивной мощности из сети асинхронным двигателем указывает на то, что он зависим от системы работы конкретного предприятия.
Если система обладает малой мощностью, то пусковые токи создают понижения напряжения. Для уменьшения пусковых токов и используются устройства с плавным пуском или преобразователи частоты.
В промышленности асинхронные электродвигатели используются с целью привода механизмов, не предъявляющих особые требования к показателям энергии, пусковым показателям, скольжению.
Безотказно асинхронный двигатель будет работать, если:
• предприятие расположено на высоте над уровнем моря 1 км максимум;
• температура окружающей среды колеблется между – 40°С и +40 °С;
• влажность воздуха при +25°С не превышает 98%;
• максимальная запыленность воздуха для закрытых электродвигателей — 10 мг/м3, для защищённых 2 мг/м3 максимум.
Во время работы асинхронного электродвигателя в окружающей среде не должно быть угрозы взрыва, содержания токопроводящей пыли, паров и газов, которые способны разрушить изоляцию и металл. Мощность электродвигателей серии АИР может колебаться между 0,06 и 400 кВт, а высота оси вращения – 50-355 мм.
Источник: http://a-eng.ru/asinkhronnyj-ehlektrodvigatel-plyusy/
Асинхронные двигатели — Просто о технологиях
Жизнь в наше время невозможно представить без электрических двигателей. Широкое применение нашли эти агрегаты не только в промышленности, но и в быту — ведь электроприборы, которые призваны облегчить жизнь человека, в 95% случаев не обходятся без применения электродвигателей.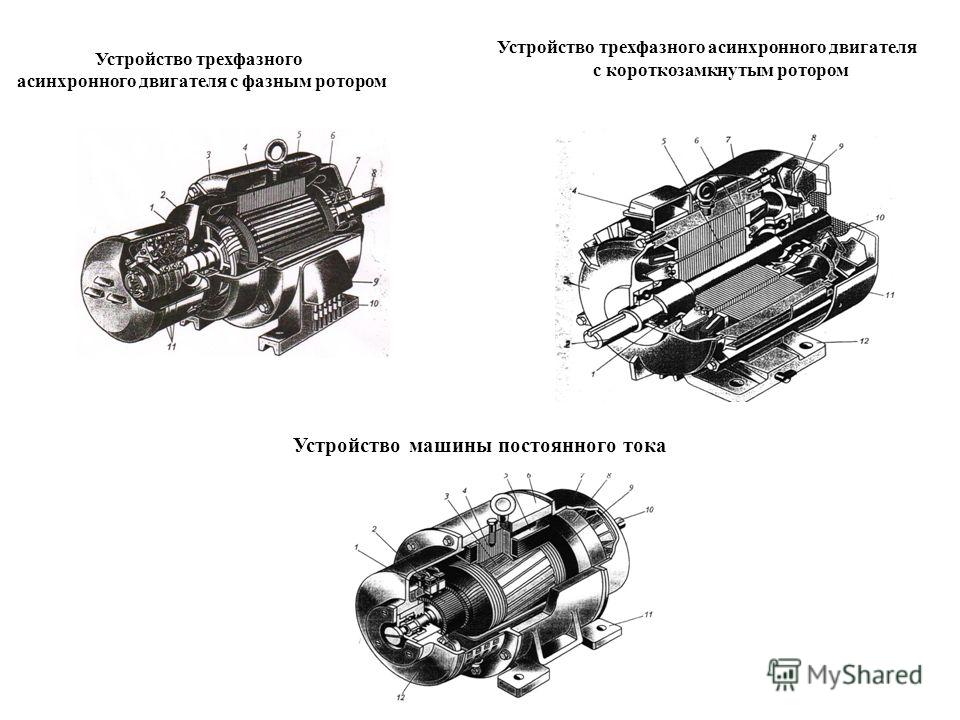 И если даже сильно постараться, то представить себе жизнь без них вряд ли удастся.
И если даже сильно постараться, то представить себе жизнь без них вряд ли удастся.
Хотя первый опытный асинхронный двигатель был произведен Николой Тесла еще в конце 1880-х годов, в то время распространения он так и не получил ввиду слишком больших потерь электроэнергии при его работе. Да и показатели того двигателя в момент запуска были очень низкими.
Что же представляет собой асинхронный двигатель? По своей сути это устройство, преобразующее электрический ток в механическую энергию посредством магнитных полей, которые вращают ротор внутри статора.
При этом частота вращения магнитных полей, которые создаются на обмотках статора, не равна тому же параметру сердечника. Именно поэтому они названы «двигатели асинхронные», т.е. «неодновременного вращения».
Что же касается видов этих агрегатов, то их различают несколько, но об этом чуть позже. Для начала имеет смысл разобрать достоинства и недостатки подобных двигателей, т.е. самого распространенного из них вида — устройства с короткозамкнутым ротором, обозначаемым как АДКЗ (асинхронный двигатель короткозамкнутого типа).
Асинхронный двигатель с короткозамкнутым ротором в разборе
Достоинства и недостатки
- В первую очередь асинхронные электродвигатели достаточно просты в части устройства и изготовления, что не может не влиять на их стоимость, ведь в частности из-за невысокой цены этот мотор завоевал большую популярность среди покупателей.
- Так же важную роль играет и надежность АД, и их экономичность в области эксплуатационных затрат — они практически не требуют обслуживания.
- Конечно, это не говорит о том, что асинхронный электродвигатель можно установить и совсем забыть о периодических ревизиях, но все же их требуется достаточно мало, схема его достаточно неприхотлива.
Ну и конечно не стоит забывать о том, что для включения в сеть, т.е. для запуска и эксплуатации, не требуется каких-либо дополнительных устройств, таких как разнообразные преобразователи и т.п.
Но, при такой простоте и невысокой стоимости, естественно, не обошлось и без недостатков, которые нельзя назвать мелкими. Из них можно выделить следующие:
Из них можно выделить следующие:
- сравнительно небольшой пусковой момент;
- значительные пусковые токи, а значит и энергозатраты при включении;
- довольно низкий коэффициент полезного действия;
- необходимую точность скорости довольно тяжело отрегулировать;
- у асинхронного двигателя, имеющего короткозамкнутый привод (при включении в трехфазную сеть 50 Гц), скорость вращения не превышает 3000 об/мин;
- большая зависимость крутящего момента от напряжения сети. К примеру, при понижении входного тока в 2 раза, скорость крутящего момента может упасть в 4 раза.
Но все вышеперечисленное относится только к моторам, имеющим строение на основе короткозамкнутого ротора, производство двигателей которыми не ограничивается. Попробуем рассмотреть более подробно асинхронные электродвигатели с короткозамкнутым ротором, а также другие типы подобных агрегатов, которые представлены на прилавках магазинов электротехники.
АДКЗ
Ротор асинхронного двигателя, обмотка которого короткозамкнута, так же называют и «беличьим колесом» по причине того, что она похожа на цилиндрическую сетку, прутья которой замыкаются посредством двух колец с одного и другого торца.
Структура, как ротора, так и асинхронного статора является зубчатой. В АД небольших мощностей обмотка изготавливается простейшим способом — алюминиевый сплав в расплавленном состоянии заливается в углубления на роторе.
Тем же способом, одновременно, заливаются и оба кольца, замыкающие «колесо», а также торцевой синхронизатор, осуществляющий вентиляционное охлаждение агрегата, т.е. с его помощью обеспечивается нормальная рабочая температура.
При необходимости изготовления более мощных двигателей вместо алюминиевого сплава используют медь.
Асинхронные двигатели переменного тока с т.н. «двойной беличьей клеткой» для модернизации пусковой характеристики в настоящее время практически ушли в прошлое.
Сейчас применяется схема, при которой пазы для проводников делаются глубже, причем внутренняя часть каждого из них имеет большее сечение, нежели внешняя.
В результате подобной технологии изготовления ротора увеличивается пусковой момент и уменьшается ток, за счет более сильного активного сопротивления обмотки.
Области применения АДКЗ довольно обширны. К тому же, в последние годы все больше начали применяться частотные преобразователи, при помощи которых стало возможно плавное наращивание скорости, вследствие чего достигается больший пусковой момент и снижение тока, тем самым увеличивается коэффициент полезного действия асинхронного двигателя с короткозамкнутым ротором.
Так же очень интересна схема исполнения АДКЗ, в которой используется возможность изменения числа пар обмоток статора. Принцип работы асинхронного двигателя подразумевает, что подобным действием возможно изменение скорости его вращения.
На сегодняшний день подобные конструкции двигателей, несмотря на их недостатки, являются наиболее распространенными и востребованными. А вот остальные виды асинхронных двигателей уже более узконаправленны, и их применение не так значительно.
Массивный ротор в АД
Короткозамкнутый двигатель, принцип работы которого заключается в отсутствии обмотки как таковой. Ротор здесь состоит целиком из стали и одновременно является и проводником, и магнитопроводом.
Ротор здесь состоит целиком из стали и одновременно является и проводником, и магнитопроводом.
Вихревые токи, инициирующиеся вращающимся магнитным полем, взаимодействуют с потоками, создаваемыми статором, посредством чего и создается крутящий момент.
Попробуем разобрать, какие же плюсы и минусы имеются у этих асинхронных двигателей.
Из преимуществ можно отметить низкую стоимость и простоту изготовления, довольно высокую механическую прочность (что очень важно для агрегатов с высокими скоростями вращения), а также наличие высокого пускового момента. Но при этом есть очень существенный недостаток —довольно большие энергопотери ротора при работе.
Интересны также и некоторые особенности, которые имеют подобные асинхронные двигатели, — это пологая механическая характеристика и сильный нагрев агрегата, независимо от нагрузки, что является довольно существенным минусом по причине резкого падения коэффициента полезного действия. Получается, что основная энергия тратится на нагрев, т. е. выработку тепла.
е. выработку тепла.
Конечно, разрабатываются и улучшения для подобных типов двигателей, такие как омеднение роторов или добавление с торцов колец из меди, но помогает подобная модернизация незначительно.
Также сюда можно отнести и пустотелые стальные роторы, которые изготавливаются для работы с меньшим нагревом.
Фазный ротор в асинхронном двигателе
Подобное устройство асинхронного электродвигателя является более сложным, т.к. их роторы имеют трехфазную обмотку, которая соединяется в «звезду».
Подобные двигатели обладают возможностью плавной регулировки скорости, причем диапазон вращения достаточно широк.
Внешняя цепь соединяется с вращающимся валом посредством специальных щеток, которые могут быть графитовыми или медно-графитовыми. Обмотка ротора выполняется из меди.
Подобный асинхронный электродвигатель подходит для использования с инверторами, реостатами для изменения скорости вращения и даже может работать в качестве синхронного двигателя при подаче на него прямого напряжения.

Возможности, которые имеют асинхронные двигатели с фазным ротором, довольно широки, но сложность при их изготовлении, а также довольно высокая стоимость не дали подобным устройствам более широкого распространения.
Двигатель Шраге-Рихтера
Этот тип является трехфазным коллекторным асинхронным двигателем, при этом питание на него поступает через ротор. Таким образом, подобные агрегаты называют также обращенными.
Асинхронный электродвигатель, у которого подобная схема, уже стал историей и практического применения на сегодняшний день не имеет.
Скорость вращения в них регулировалась специальным штурвалом, который перемещал щетки, в результате чего изменялась индуктивность. Подобная система довольно экономично изменяет скорость вращения ротора, но более подробно на таких агрегатах останавливаться не стоит.
Куда интереснее понять устройство асинхронного двигателя и принцип его работы.
Устройство и принцип действия
Как уже говорилось ранее, конструкция асинхронного двигателя достаточно проста — это ротор, или вращающаяся часть, и статор — неподвижная обмотка, внутри которой и создаются электромагнитные импульсы. Снаружи статор может иметь цельную либо сваренную оболочку из чугуна, алюминия, или его сплава, которая работает как радиатор охлаждения в процессе эксплуатации.
Снаружи статор может иметь цельную либо сваренную оболочку из чугуна, алюминия, или его сплава, которая работает как радиатор охлаждения в процессе эксплуатации.
Асинхронный двигатель в разрезе
Принцип действия АД таков: напряжение, поступая на обмотки, создает магнитное поле. И т.к.
угол сдвига фаз в асинхронном двигателе составляет 120 градусов, то поле, вырабатываемое ими, является вращающимся. Оно-то и создает крутящий момент, проходя через обмотки ротора.
По сути, смысл работы тот же, что и у синхронных агрегатов, но тут не требуется создания на статоре дополнительного поля в виде магнитов.
Подключение асинхронных двигателей
Разобравшись, каков же принцип действия АД, можно переходить к подключению.
Существует две разновидности подключения асинхронного двигателя к сети 380 В, хотя от этого принцип его действия не меняется. Это может быть «звезда» либо «треугольник». Сейчас имеет смысл разобрать каждый из этих видов подробнее.
- Подключение «звездой» происходит следующим образом: напряжение по фазным проводам подается к началу, а каждая обмотка асинхронного двигателя концом соединена с началом следующей таким образом, что создается некое подобие треугольника.
- Нулевой провод при подключении трехфазных двигателей не требуется, им вполне хватает защитного заземления корпуса.

Подключение «звездой» немного отличается от предыдущего. Здесь концы всех обмоток соединены вместе, а напряжение подается также на начало.
Интересно, что при подобном подключении в месте соединения всех трех обмоток по причине разности потенциалов возникает так называемый «технический ноль».
Подобное физическое явление можно наблюдать и в жилах высоковольтного провода, где ноль находится точно по центру, в то время как по проводнику течет ток высокого напряжения.
Схемы подключений в «треугольник» и «звезда»
Есть ли альтернатива
Уже не секрет, что устройство трехфазного асинхронного двигателя предполагает затраты большого количества электроэнергии на вырабатывание тепла, а значит и коэффициент его полезного действия достаточно низок. Но на сегодняшний день альтернативы подобным агрегатам нет, а потому продолжается их использование, как в промышленности, так и в быту.
Конечно, с появлением инверторов, КПД их значительно возрос. Сейчас двигатели инверторного типа прекрасно работают в стиральных машинах, холодильниках и прочей технике, позволяя получить максимум результата при меньшем расходе электроэнергии.
Возможно, в будущем и появится что-то новое, что сможет заменить асинхронные двигатели, но пока это остается единственным в своем роде агрегатом, без которого различные производства невозможны. Именно этим и объясняется его востребованность и распространенность.
Источник: https://freshgeek.ru/asinhronnye-dvigateli/
Асинхронный двигатель. Устройство и принцип работы
Здравствуйте, дорогие читатели! Сегодня вы узнаете, что такое асинхронный двигатель, рассмотрим его основные характеристики, а так же поговорим о плюсах и минусах.
Принцип работы любого асинхронного двигателя основан на физическом взаимодействии магнитного поля, возникающего в статоре, с током, который это же поле наводит в обмотке ротора.
Электрическое напряжение прикладывается к обмотке статора, которая выполнена как три группы катушек. Под действием напряжения в обмотке возникает переменный трехфазный ток, который и наводит вращающееся магнитное поле.
При пересечении замкнутой обмотки ротора, это поле, в соответствии с законом об электромагнитной индукции, создает в ней ток.
Взаимодействие вращающегося магнитного поля (статор) и тока (ротор) создает вращающий электромагнитный момент, который и приводит ротор в движение.
Благодаря совокупности моментов, создаваемых отдельными проводниками, возникает результирующий момент, электромагнитная пара сил, заставляющая вращаться ротор в направлении, в котором движется электромагнитное поле в статоре. Ротор и магнитное поле при этом вращаются с различными скоростями, т.е.
асинхронно (отсюда и основное название двигателей). У асинхронных двигателей скорость, с которой будет вращаться ротор, всегда будет меньше скорости, с которой вращается магнитное поле в статоре.
Рис. 1. Асинхронный двигатель
Асинхронный двигатель с фазным ротором необходим в приводах, которые сразу требуют большого пускового момента – лифты, краны, мельницы и т.д. В таких механизмах необходимее уже при запуске двигателя получить максимальный момент, но при этом ограничив значение пускового тока.
Основные элементы асинхронного двигателя – ротор и статор, разделяемые воздушным зазором. Активные части двигателя – магнитопровод и обмотки, остальные составляющие – конструктивные, призванные обеспечить необходимую жесткость, прочность, возможность вращения и его стабильность, охлаждение и т.д.
Cтатор – неподвижная часть, на внутренней стороне сердечника которого размещаются обмотки. Обмотка статора — это трехфазная (для общего случая — многофазная) обмотка, в которой проводники равномерно распределяются по окружности статора и уложены пофазно в пазах, соблюдая угловое расстояние равное 120 эл.град.
Статорные фазы обмотки соединены стандартно – «звезда» или «треугольник» — и подключены к трехфазной сети электротока.
В процессе вращения (изменения) магнитного потока в обмотках возбуждения, происходит перемагничивание магнитопровода статора, поэтому он изготовлен шихтованным (набирается из пластин) из особой электротехнической стали – таким способом удается минимизировать магнитные потери.
Асинхронные двигатели, особенности пуска
Асинхронные двигатели сегодня – это доля в 80% от всего количества разнообразных электродвигателей, выпускаемых мировой промышленностью. Все это – благодаря простоте конструкции, в эксплуатации и обслуживании, низкой себестоимости и высокой надежности.
Но есть один существенный недостаток – из сети асинхронные двигатели потребляют реактивную составляющую мощности. Поэтому их предельная мощность напрямую зависит от мощности системы энергоснабжения.
Кроме того, такой электропривод имеет значения пускового тока, которые в трое больше рабочих. При малой мощности системы энергоснабжения, это может вызвать значительное падение напряжение в сети и отключение других приборов.
Асинхронные двигатели с фазным ротором, благодаря введению в цепь ротора пусковых реостатов, могут запускаться с небольшим пусковым током.
Резисторы, стоящие в цепи ротора, помогают ограничить ток не только в течении запуска, но так же и при торможении, реверсе и при снижении скорости.
По мере того, как двигатель набирает скорость – разгоняется, чтобы поддерживать необходимое ускорение, резисторы выводятся.
При окончании разгона и выхода на паспортную частоту, все резисторы шунтируются, двигатель переходит на работу со своей естественной механической характеристикой.
Рассмотрим пример запуска асинхронного двигателя с фазным ротором.
Используя схему асинхронного двигателя (рис) рассмотрим запуск в две ступени который проводится с использованием релейно-контакторной аппаратуры. Одновременно напряжение подается как на силовые цепи, так и на управляющие – замыкается выключатель QF.
При подаче напряжения реле времени (обозначены КТ1 и КТ2) в цепи управления срабатывают, размыкая свои контакты. После нажатия кнопки запуска (SB1) срабатывает контактор КМ3 и запускается двигатель с резисторами, которые введены в цепь ротора – в этот момент на контакторах КМ1 и КМ2 питания нет.
При подключении контактора КМЗ, из-за потери питания, в цепи контактора КМ1 реле КТ1 замыкает контакт через интервал времени, заданный задержкой времени в реле КТ1.
По истечению времени (двигатель разгоняется, ток ротора начинает падать) происходит включение контактора КМ1 – происходит шунтирование первой пусковой ступени резисторов. Ток снова возрастает , но по мере разгона его значение начинает уменьшаться.
Одновременно с этим в цепи происходит размыкание реле КТ2, оно теряет питание и с выставленной выдержкой происходит замыкание контакта в цепи контактора КМ2. Происходит шунтирование второй ступени резисторов, включенных в цепь ротора. Двигатель работает в штатном режиме.
Благодаря ограничению пускового тока, асинхронный двигатель с фазовым ротором можно устанавливать в слабых сетях.
Асинхронные двигатели, плюсы и минусы
Как уже указывалось выше, если сравнивать его с двигателем с короткозамкнутым ротором, имеет два основных преимущества:
- возможность запуска двигателя с уже подключенной к валу значительной нагрузкой – двигатель с самого начала создает большой вращающий момент
- ограничение по току включения позволяет устанавливать асинхронные двигатели с фазовым ротором в маломощных сетях
Кроме того, следует отметить и другие достоинства:
- возможность работы с большой перегрузкой
- малые колебания скорости вращения – при разных нагрузках скорость вращения остается приблизительно одинаковой
- возможность установки автоматики – пусковых приспособлений
Отметим и недостатки:
- введение резисторов в цепь ротора усложняет и удорожает двигатель
- большие габариты
- меньший, чем у короткозамкнутых двигателей, показатель КПД и cos φ
- при недогрузках значение cos φ имеет минимальные значения
На практике асинхронный двигатель с фазным ротором оптимально подходят для случаев, когда нет необходимости в широкой и плавной регулировке скорости и требуется очень большая (особенно на первоначальном этапе) мощность двигателя. Для правильного подключения асинхронного двигателя важно правильно определить начала и концы фазных обмоток. Как это сделать – подробно рассмотрено на видео:
Источник: https://powercoup.by/stati-po-elektromontazhu/asinhronnyiy-dvigatel
Плюсы и минусы электрических двигателей — Строительство
Тема производства экономичных двигателей возникла практически сразу после изобретения машин, работающих от электрического тока.
В процессе прохождения выставки электротехнических устройств, проведенной в 1891 в г. Франкфурт-на-Майне, Чарльзом Брауном был продемонстрирован электрический генератор, имеющий КПД около 95%. Асинхронный двигатель, который продемонстрировал Михаил Доливо-Добровольский, также выдал КПД 95%.
С того времени параметры этих устройств были повышены не более чем на 1-2 процента.
Наиболее востребованными электрические двигатели предлагаемые на сайте ELMO стали в 70х годах, при возникшей нехватке нефтепродуктов.
На практике оказалось, что экономия топлива стоила намного меньше, нежели ее добыча. Вложения денежных средств в энергосберегающие программы увеличились в разы.
Многие организации и страны начали выдачу специальных грантов, предназначенных для развития программ энергосбережения.
Проанализировав мировое потребление электрической энергии, выяснилось, что более половины всей энергии, производимой в мире, потребляют именно электрические двигатели. По этой причине их доработкой и улучшением занимаются все компании, работающие в этой отрасли.
Двигатели с функцией энергосбережения
Эти модели представляют собой устройства, с КПД на порядок больше, чем у простых двигателей подобного рода. В больших двигателях с функцией энергосбережения, эта разница невелика, в пределах 1-2%. В остальных типах она выше, и держится на уровне 7-10%.
КПД электродвигателей, выпущенных компанией Siemens.
Повышение уровня КПД становится возможным при соблюдении следующих условий:
- Повышение содержания активных материалов, а именно медных и стальных деталей
- Применение специальной стали для производства электротехнических изделий, с уменьшенной толщиной.
- В обмотках роторов ранее применяемый алюминий заменен на медь.
- В статоре уменьшается воздушная прослойка, при помощи предназначенных для этого устройств.
- Установка подшипников с повышенным качеством.
- Установка специальных вентиляторов.
Согласно имеющимся данным, около 2% от затрат за весь период его работы приходится на цену самого двигателя.
Например, при работе двигателя на протяжении 4 тысяч часов каждый год в течение 10 лет, затраты на потребляемую электроэнергию составляют около 97% от общего количества.
Около 1% процента уходит на техническое обслуживание и монтажные работы. То есть повышение этого параметра на 2% дает возможность покрытия увеличения его стоимости уже через 3 года.
Преимущества перехода к использованию электрического двигателя:
- Увеличение коэффициента полезного действия двигателя от 1 до 10 %.
- Уменьшение количества поломок.
- Уменьшение расходов на техническое обслуживание.
- Повышение уровня устойчивости к нагрузкам, сопровождающихся перегревом.
- Увеличить стойкость к повышенным нагрузками.
- Увеличить стойкость к неблагоприятным условиям.
- Сделать эксплуатацию менее шумной.
- За счет снижения скольжения, увеличить скорость его работы.
Минусами такого двигателя являются:
- Увеличенная стоимость примерно на треть.
- Увеличенный вес.
- Высокий уровень тока, необходимого для запуска.
При работе двигателя в условиях частого отключения и запуска его применение является невыгодным, так как вся сохраненная энергия потратится на повышенное значение токов запуска. Также его не используют при малом количестве часов работы, которое не может обеспечить необходимое количество сохраненной энергии. Двигатели такого рода являются очень востребованными в настоящее время.
Источник: http://obystroy.com/preimushchestva/plyusy-i-minusy-elektricheskikh-dvigatelej
Электродвигатель. Виды и применение. Работа и устройство
Электродвигатель представляет электромашину, перестраивающую электрическую энергию в механическую. Обычно электрическая машина реализует механическую работу благодаря потреблению приложенной к ней электроэнергии, преобразовывающейся во вращательное движение. Ещё в технике есть линейные двигатели, способные создавать сразу поступательное движение рабочего органа.
Особенности конструкции и принцип действия
Не важно какое конструктивное исполнение, но устройство любых электродвигателей однотипное. Ротор и статор находятся внутри цилиндрической проточки.
Вращение ротора возбуждают магнитное поле, отталкивающее его полюса от статора (неподвижной обмотки). Сохранять постоянное отталкивание можно путём перекоммутации обмоток ротора, или образовав вращающееся магнитное поле непосредственно в статоре.
Первый способ присущий коллекторным электродвигателям, а второй — асинхронным трехфазным.
Корпус любых электродвигателей обычно чугунный или выполнен из сплава алюминия. Однотипные двигатели, не смотря на конструкцию корпуса производятся с одинаковыми установочными размерами и электрическими параметрами.
Работа электродвигателя базируется на принципах электромагнитной индукции. Магнитная и электрическая энергия создают электродвижущуюся силу в замкнутом контуре, проводящем ток. Это свойство заложено в работу любой электромашины.
На движущийся электроток в середине магнитного поля постоянно воздействует механическая сила, стремительно пытающаяся отклонить направление зарядов в перпендикулярной силовым магнитным линиям плоскости. Во время прохождения электротока по металлическому проводнику либо катушке, механическая сила норовит подвинуть или развернуть всю обмотку и каждый проводник тока.
Назначение и применение электродвигателей
Электрические машины имеют много функций, они способны усиливать мощность электрических сигналов, преобразовывать величины напряжения либо переменный ток в постоянный и др.
Для выполнения таких разных действий существуют многообразные типы электромашин. Двигатель представлят тип электрических машин, рассчитанных для преобразования энергии.
А именно, этот вид устройств превращает электроэнергию в двигательную силу или механическую работу.
Он пользуется большим спросом во многих отраслях. Их широко используется в промышленности, на станках различного предназначения и в других установках. В машиностроении, к примеру, землеройных, грузоподъёмных машинах. Также они распространены в сферах народного хозяйства и бытовых приборах.
Электродвигатель, является разновидностью электромашин по:
- Специфике, создающегося вращательного момента: — гистерезисные;— магнитоэлектрические.
- Строению крепления: — с горизонтальным расположением вала;— с вертикальным размещением вала.
- Защите от действий внешней среды: — защищённые; — закрытые;— взрывонепроницаемые.
В гистерезисных устройствах вращающий момент образуется путём перемагничивания ротора или гистерезиса (насыщения). Эти двигатели мало эксплуатируются в промышленности и не считаются традиционными. Востребованными являются магнитоэлектрические двигатели. Существует много модификаций этих двигателей.
Их разделяют на большие группы по типу протекающего тока:
- Постоянного тока.
- Переменного тока.
- Универсальные двигатели (работают на постоянном переменном токе).
Особенности магнитоэлектрических двигателей постоянного тока
С помощью двигателей постоянного тока создают регулируемые электрические приводы с высокими эксплуатационными и динамическими показателями.
Типы электродвигателей:
- С электромагнитами.
- С постоянными магнитами.
Группа электродвигателей, питание которых выполняется постоянным током, подразделяется на подвиды:
- Коллекторные. В этих электроприборах присутствует щёточно-коллекторный узел, обеспечивающий электрическое соединение неподвижной и вращающейся части двигателя. Устройства бывают с самовозбуждением и независимым возбуждением от постоянных магнитов и электромагнитов.
- Выделяют следующие виды самовозбуждения двигателей: — параллельное; — последовательное;— смешанное.
- Коллекторные устройства имеют несколько минусов: — низкая надёжность приборов;— щёточно-коллекторный узел довольно сложная в обслуживании составляющая часть магнитоэлектрического двигателя.
- Безколлекторные (вентильные). Это двигатели с замкнутой системой, работающие по аналогичному принципу работы синхронных устройств. Оснащены датчиком положения ротора, преобразователем координат, а также инвертором силовым полупроводниковым преобразователем.
Эти машины выпускаются различных размеров от самых маленьких низковольтных до громадных размеров (в основном до мегаватта). Миниатюрными электродвигателями оснащены компьютеры, телефоны, игрушки, аккумуляторные электроинструменты и т.п.
Применение, плюсы и минусы электродвигателей постоянного тока
Электромашины постоянного тока применяют в разных областях. Ими комплектуют подъёмно-транспортные, красочно-отделочные производственные машины, а также полимерное, бумажное производственное оборудование и т.д. Часто электрический двигатель этого типа встраивают в буровые установки, вспомогательные агрегаты экскаваторов и другие виды электротранспорта.
Преимущества электрических двигателей:
- Лёгкость в управлении и регулировании частоты вращения.
- Простота конструкции.
- Отменные пусковые свойства.
- Компактность.
- Возможность эксплуатации в разных режимах (двигательном и генераторном).
Минусы двигателей:
- Коллекторные двигатели требуют трудное профилактическое обслуживание щёточно-коллекторных узлов.
- Дороговизна производства.
- Коллекторные устройства имеют не большой срок службы из-за изнашивания самого коллектора.
Электродвигатель переменного тока
В электродвигателях переменного тока электроток описывается по синусоидальному гармоническому закону, периодично меняющему свой знак (направление).
Статор этих устройств изготавливают из ферромагнитных пластинок, имеющих пазы для помещения в них витков обмотки с конфигурацией катушки.
Электродвигатели по принципу работы бывают синхронными и асинхронными. Главным их отличием является то, что скорость магнитодвижущей силы статора в синхронных приборах равна скорости вращения ротора, а в асинхронных двигателях эти скорости не совпадают, обычно ротор вращается медленнее поля.
Синхронный электродвигатель
Из-за одинакового (синхронного) вращения ротора с магнитным полем, аппараты именуют синхронными электродвигателями. Их подразделяют на подвиды:
- Реактивный.
- Шаговый.
- Реактивно-гистерезисный.
- С постоянными магнитами.
- С обмотками возбуждения.
- Вентильный реактивный.
- Гибридно-реактивный синхронный двигатель.
Большая часть компьютерной техники оснащена шаговыми электродвигателями. Преобразование энергии в этих устройствах основано на дискретно угловом передвижении ротора.
Шаговый электродвигатель имеет высокую продуктивность, независящую от их мизерных размеров.
Достоинства синхронных двигателей:
- Стабильность частоты вращения, что не зависит от механических нагрузок на валу.
- Низкая чувствительность к скачкам напряжения.
- Могут выступать в роли генератора мощности.
- Снижают потребление мощности, предоставляемой электростанциями.
Недостатки в синхронных устройствах:
- Сложности с запуском.
- Сложность конструкции.
- Затруднения в регулировки частоты вращения.
Недостатки синхронного двигателя, делают более выгодным для использования электродвигатель асинхронного типа.
Тем не менее, большинство синхронных двигателей из-за их работы с постоянной скоростью востребованы для установок в компрессоры, генераторы, насосы, а также крупные вентиляторы и пр. оборудование.
Асинхронный электродвигатель
Статор асинхронных двигателей представляет распределённую двухфазную, трехфазную, реже многофазную обмотку. Ротор выполняют в виде цилиндра, используя медь, алюминий либо металл.
В его пазы залиты либо запрессованные токопроводящие жилы к оси вращения под определённым углом. Они соединяются в одно целое на торцах ротора.
Противоток возбуждается в роторе от переменного магнитного поля статора.
По конструктивным особенностям выделяют два вида асинхронных двигателей:
- С фазным ротором.
- С короткозамкнутым ротором.
В остальном конструкция приборов не имеет отличий, статор у них абсолютно одинаковый. по числу обмоток выделяют такие электродвигатели:
- Однофазные. Этот тип двигателей самостоятельно не запускается, ему требуется стартовый толчок. Для этого применяется пусковая обмотка либо фазосдвигающая цепь. Также приборы запускаются вручную.
- Двухфазные. В этих устройствах присутствуют две обмотки со смещёнными на угол фазами. В приборе возникает вращающееся магнитное поле, напряженность которого в полюсах одной обмотки нарастает и синхронно спадает в другой. Двухфазный электродвигатель может самостоятельно запускаться, но с реверсом присутствуют сложности. Часто этот тип устройств подключают к однофазным сетям, включая вторую фазу через конденсатор.
- Трехфазные. Достоинством этих типов электродвигателей является легкий реверс. Основные части двигателя – это статор с тремя обмотками и ротор. Позволяет плавно регулировать скорость ротора. Эти приборы довольно востребованы в промышленности и технике.
- Многофазные. Состоят эти устройства из встроенной многофазной обмотки в пазах статора на его внутренней поверхности. Эти двигатели гарантируют высокую надёжность при эксплуатации и считаются усовершенствованными моделями двигателей.
Асинхронные электрические двигатели значительно облегчают работу людей, поэтому они незаменимы во многих сферах.
Достоинствами этих приборов, которые сыграли роль в их популярности, являются следующие моменты:
- Простота производства.
- Высокая надёжность.
- Не нуждаются в преобразователях для включения в сеть.
- Небольшие расходы при эксплуатации.
Ко всему этому, можно добавить относительную стоимость асинхронных приборов. Но они также имеют и недостатки:
- Невысокий коэффициент мощности.
- Трудность в точной регулировке скорости.
- Маленький пусковой момент.
- Зависимость от напряжения сети.
Но благодаря питанию электродвигателя с помощью частотного преобразователя, некоторые недостатки устройств устраняются.
Поэтому потребность асинхронных моторов не падает. Их применяют в приводах разных станков в областях металлообработки, деревообработки и пр.
В них нуждаются ткацкие, швейные, землеройные, грузоподъёмные и другие виды машин, а также вентиляторы, насосы, центрифуги, разные электроинструменты и бытовые приборы.
Источник: https://electrosam.ru/glavnaja/jelektrooborudovanie/ustrojstva/elektrodvigatel/
Принцип работы электродвигателя переменного тока, устройство электромотора.
Электрические двигатели – это силовые машины, применяющиеся для превращения электрической энергии в механическую. Общая классификация разделяет их по типу питающего тока на двигатели постоянного и переменного тока. В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
Для общей информации, рекомендуем прочитать нашу отдельную статью о принципах работы электродвигателей.
Содержание:
Электродвигатель переменного тока промышленного типа
Принцип преобразования энергии
Среди электрических двигателей, применяемых во всех отраслях промышленности и бытовых электроприборах, наибольшее распространение имеют двигатели переменного тока. Они встречаются практически в каждой сфере жизнедеятельности – от детских игрушек и стиральных машин до автомобилей и мощных производственных станков.
Принцип работы всех электрических двигателей основывается на законе электромагнитной индукции Фарадея и законе Ампера. Первый из них описывает ситуацию, когда на замкнутом проводнике, находящемся в изменяющемся магнитном поле, генерируется электродвижущая сила. В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
Вращение ротора объясняется законом Ампера, который утверждает, что на электрические заряды, протекающие по проводнику, находящемуся внутри магнитного поля, действует сила, движущая их в плоскости, перпендикулярной силовым линиям этого поля. Проще говоря, проводник, которым в конструкции двигателя является ротор, начинает вращаться вокруг своей оси, а закрепляется он на валу, к которому подключаются рабочие механизмы оборудования.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
История изобретения
Изобретение простейшего способа преобразования энергии из электрической в механическую принадлежит Майклу Фарадею. В 1821 году этот великий английский ученый провел эксперимент с проводником, опущенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовым линиями магнитного поля. В наши дни этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
Дальнейшее изучение вопроса привело к созданию Питером Барлоу в 1824 году униполярного двигателя, названного колесом Барлоу. В его конструкцию входят два зубчатых колеса из меди, расположенных на одной оси между постоянными магнитами. После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
Первый рабочий образец устройства, ставшего прародителем современных двигателей, был создан русским физиком Борисом Семеновичем Якоби в 1834 году. Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически в неизменном виде применяется современных двигателях постоянного тока.
А вот создание первого двигателя с асинхронным принципом работы принадлежит сразу двум ученым – Николе Тесла и Галилео Феррарис, по удачному стечению обстоятельств продемонстрировавшим свои изобретения в один год (1888). Через несколько лет двухфазный бесколлекторный двигатель переменного тока, созданный Николой Тесла уже использовался на нескольких электростанциях. В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
Система переменного тока, предложенная Вестингаузом
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным. В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Преимущества и недостатки электрических двигателей переменного тока
В наши дни среди всех электродвигателей устройства для переменного тока занимают лидирующую позицию по объему использования в силовых установках. Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Главным недостатком двигателей переменного тока с асинхронным принципом работы является тот факт, что регулировать их частоту вращения вала можно только изменяя входную частоту тока. Это не позволяет добиться постоянной скорости вращения, а также снижает мощность. Для асинхронных электродвигателей характерны высокие пусковые токи, но низкий пусковой момент. Для исправления этих недостатков применяется частотный привод, однако его цена противоречит одному из главных достоинств этих двигателей – низкой себестоимости.
Слабым местом синхронного двигателя является его сложная конструкция. Графитовые щетки довольно быстро выходят из строя под нагрузкой, а также теряют плотный контакт с коллектором из-за ослабления прижимной пружины. Кроме того, эти двигатели, как и асинхронные аналоги, не защищены от износа подшипников вала. К недостаткам также относится более сложный пуск, необходимость наличия источника постоянного тока и исключительно частотная регулировка частоты вращения.
Применение
На сегодняшний день электродвигатели со спецификацией на переменный ток распространены во всех сферах промышленности и жизнедеятельности. На электростанциях они устанавливаются в качестве генераторов, используются в производственном оборудовании, автомобилестроении и даже бытовой технике. Сегодня в каждом доме можно встретить как минимум одно устройство с электрическим двигателем переменного тока, например, стиральную машину. Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Среди асинхронных электрических машин наибольшее распространение получили устройства с трехфазной спецификацией. Они являются наилучшим вариантом для использования во многих силовых агрегатах, генераторах и высокомощных установках, работа которых связана с необходимостью контроля скорости вращения вала.
Назначение и принцип действия асинхронного двигателя
Назначение асинхронного электродвигателя
Система трехфазного переменного тока, позволившая создать устройства для получения вращающегося магнитного потока, вызвала появление наиболее распространенного в данное время электродвигателя, называемого асинхронным. Это название обусловлено тем, что вращающаяся часть машины — ротор — всегда вращается со скоростью, не равной скорости магнитного потока, т.е. не синхронно с ним. Изготовляемый на мощности от долей ватта до тысяч киловатт при напряжениях 127, 220, 380, 500, 600, 3000, 6000, 10000 В, этот электродвигатель прост по конструкции, надежен в эксплуатации и дешев по сравнению с другими типами. Он применяется во всех видах работ, где не требуется поддержания постоянной скорости вращения, а также в быту, в однофазном исполнении для малой мощности.
Принцип действия асинхронного двигателя
Рассмотрим устройство, показанное на рис. Оно состоит из постоянного магнита 1, медного диска 2, рукоятки 3 и подшипников 4. Если вращать магнит при помощи рукоятки, то медный диск начинает вращаться в ту же сторону, но с меньшей частотой. Медный диск можно рассматривать как бесчисленное множество замкнутых витков; при вращении магнита 1 его магнитные силовые линии (м.с.л.) пересекают витки диска, и в витках наводится электродвижущая
Модель асинхронного двигателя
Обозначим:
п, — частота вращения магнита (синхронная частота), об/мин;
п2 — частота вращения диска, об/мин; п — разность частот вращения магнита и диска, об/мин.
Частота вращения диска меньше частоты вращения магнита, и, следовательно, диск вращается с несинхронной (асинхронной) частотой. Разница частот магнита и диска представляет собой частоту, с которой м.с.л. пересекают витки диска. Отношение разницы частот к синхронной частоте называется скольжением. Скольжение может быть выражено в долях единицы или в процентах:
В двигателях вращающееся магнитное поле создается трехфазным током, протекающим по обмотке статора, а роль диска выполняет обмотка ротора. Активная сталь статора и ротора служит магнитопроводом, уменьшающим в сотни раз сопротивление магнитному потоку.
Под влиянием подведенного к статору напряжения сети Ul в его обмотке протекает ток I,. Этот ток создает вращающийся магнитный поток Ф, замыкающийся через статор и ротор. Поток создает в обеих обмотках э.д.с. Е{ и Е2, как в первичной и вторичной обмотках трансформатора. Таким образом, асинхронный двигатель подобен трехфазному трансформатору, в котором э.д.с. создаются вращающимся магнитным потоком.
Рис. 2 . Работа асинхронного двигателя при cos ф2 = 1
Пусть поток вращается в направлении движения стрелки часов. Под влиянием э.д.с. Е2 в обмотке ротора пойдет ток I2, направление которого показано на рис. 2. Предположим, что он совпадает по фазе с Е2. Взаимодействие тока I2 и потока Ф создает электромагнитные силы F, приводящие ротор во вращение, вслед за вращающимся потоком. Таким образов, асинхронный двигатель представляет собой трансформатор с вращающейся вторичной обмоткой и способный поэтому превращать электрическую мощность E2I2 cos ф в механическую.
Ротор всегда отстает от вращающегося магнитного потока, так как только в этом случае может возникать э.д.с. Е2, а следовательно, ток 12 и силы F. Чтобы изменить направление вращения ротора, следует изменить направление вращения потока. Для этого меняют местами два любых провода, подводящие ток от сети к статору. В этом случае меняется порядок следования фаз ABC на АСВ или ВАС, и поток вращается в обратную сторону.
Ротор двигателя вращается с асинхронной частотой п2, поэтому и двигатель называется асинхронным. Частоту вращения магнитного потока называют синхронной частотой п1. Частота вращенияротора
Теоретически скольжение меняется от 1 до 0 или от 100% до 0, так как при неподвижном роторе в первый момент пуска п2 — 0; а если вообразить, что ротор вращается синхронно с потоком, п2 = пх.
Чем больше нагрузка на валу, тем меньше скорость ротора п2 и следовательно больше S, так как больший тормозной момент должен уравновеситься вращающим моментом; последнее возможно только при увеличении Е2 и I2, а значит и S. Скольжение при номинальной нагрузке SH у асинхронных двигателей равно от 1 до 7%; меньшая цифра относится к мощным двигателям.
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть подключены по схеме «звезда», обычно без внешнего подключения к нейтральной точке, или по схеме «треугольник». Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора проводящим концевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя.
Encyclopædia Britannica, Inc.Основы работы асинхронного двигателя можно разработать, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести моментов цикла.Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки. В момент t 1 на рисунке ток в фазе a является максимально положительным, а в фазах b и c — вдвое отрицательным. Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т.е.е., одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как ток в фазе b и фазе a имеет положительное значение на половину. Результат, как показано на рисунке для t 2 , снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для т 3 , т 4 , т 5 и т 6 показывает, что магнитное поле продолжает вращаться с течением времени.Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и текущих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Получите эксклюзивный доступ к контенту из нашего первого издания 1768 с вашей подпиской. Подпишитесь сегодняВращательное движение магнитного поля относительно проводников ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников.Поскольку проводники ротора замкнуты накоротко на каждом конце, это приведет к протеканию токов в этих проводниках. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника. На этом рисунке представлена диаграмма токов ротора за момент времени t 1 рисунка. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (т.е.е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному снижению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора.
Encyclopædia Britannica, Inc.Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке.Общий ток статора в каждой фазной обмотке является суммой синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии. Второй, или силовой, компонент тока находится в фазе с напряжением, приложенным к статору, в то время как первый, или намагничивающий, компонент отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно небольшой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для двигателей большой мощности и до примерно 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со скоростью изменения магнитного потока в статоре машины во времени.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле вращается на один оборот за каждый цикл частоты питания. Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 процентов ниже скорости поля (часто называемая синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости могут быть получены с источником постоянной частоты путем создания машины с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — количество полюсов (которое должно быть четное число).Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов с помощью катушек, охватывающих угол приблизительно (360/ p ) °. Крутящий момент, доступный от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц — 1800 и 1200 оборотов в минуту.
ИНВЕРТОРЫ (Асинхронный двигатель)
4,3
Инвертор источника трехфазного напряжения (VSI) показан на рисунке 4.13. Источник напряжения для инвертора состоит из выпрямителя и так называемого звена постоянного тока, состоящего из конденсатора C и катушки индуктивности L. Если машина переменного тока, питаемая от инвертора, работает как двигатель (т. Е. или третий квадрант), средний входной ток положительный. Однако мгновенный входной ток iv может принимать отрицательные значения, поглощаемые конденсатором звена постоянного тока, что, следовательно, необходимо.Конденсатор также служит источником высокочастотной составляющей переменного тока iv, поэтому она не выводится из системы питания через выпрямитель. Кроме того, конденсатор звена постоянного тока сглаживает и стабилизирует напряжение, создаваемое выпрямителем. Дополнительная индуктивность звена постоянного тока менее важна, поскольку она вводится для обеспечения дополнительной защиты энергосистемы от высокочастотного тока, потребляемого инвертором.
РИСУНОК 4.13 Инвертор источника напряжения.
Очевидно, что топология инвертора источника напряжения обратна топологии ШИМ-выпрямителя источника тока на Рисунке 4.12 (обратите внимание, что нагрузка инвертора дает индуктивности, соответствующие входным индуктивностям L {, выпрямителя). Здесь диоды свободного хода обеспечивают альтернативные пути для выходных токов. Оба полупроводниковых переключателя питания в данной ветви (фазе) инвертора не могут быть включены одновременно, поскольку они могут закоротить входные клеммы. С другой стороны, если оба переключателя выключены, выходное напряжение будет неопределенным, поскольку потенциал соответствующей выходной клеммы будет зависеть от того, какой диод проводит выходной ток в этой фазе.Это сделало бы невозможным управление выходным напряжением без обратной связи. Следовательно, инверторы источников напряжения управляются таким образом, что один переключатель на каждой ноге включен, а другой выключен. Таким образом, включенный переключатель соединяет одну из входных клемм с выходной клеммой, и всегда известны потенциалы всех трех выходных клемм. Чтобы избежать так называемого сквозного прохода, то есть потенциально опасного одновременного проведения обоих переключателей в одной и той же ветви, включение переключателя немного задерживается по сравнению с выключением другого переключателя.Эта задержка порядка нескольких микросекунд называется мертвым временем или временем гашения.
Инвертор источника напряжения может работать как в режиме ШИМ, так и в так называемом режиме прямоугольной волны, характеризующегося прямоугольными формами выходного напряжения. Режим прямоугольной волны дает самый высокий коэффициент усиления по напряжению инвертора, но качество выходного тока хуже, чем в режиме ШИМ.
На рисунке 4.14 показан инвертор источника тока (CSI), который в прямоугольном режиме выдает прямоугольные формы выходного тока.Для единообразия IGBT показаны здесь как инверторные переключатели, но на практике инверторы с источниками тока часто имеют такую высокую мощность, что они должны быть основаны на GTO или SCR с коммутирующими цепями (для выключения SCR). Источник тока обеспечивается управляемым выпрямителем с регулированием тока с обратной связью и индуктивным звеном постоянного тока. Инвертор отличается от своего аналога с источником напряжения отсутствием диодов свободного хода, которые не нужны, потому что постоянный входной ток никогда не бывает отрицательным.
Добавление конденсаторов на выходе позволяет использовать ШИМ-режим инвертора источника тока. Эти конденсаторы отмечены на рис. 4.14 пунктирными линиями. Переключающее действие переключателей инвертора приводит к появлению импульсных сигналов токов ia, ib и ic, но конденсаторы шунтируют большую часть высокочастотных гармоник этих токов. Таким образом, формы сигналов выходных токов iA, iB и ic представляют собой волнистые синусоиды. Этот инвертор является инвертором выпрямителя с источником напряжения на Рисунке 4.8.
В последнее время серьезное внимание уделяется многоуровневым инверторам источников напряжения. Они допускают более высокие номинальные напряжения, чем классический инвертор на рис. 4.12, и вырабатывают токи более высокого качества, хотя и за счет большего количества устройств. Под количеством уровней понимается количество значений напряжения на выходе инвертора. Например, в инверторе источника напряжения, описанном ранее, каждая клемма может быть
РИСУНОК 4.14 Инвертор источника тока.
подключен к положительной или отрицательной шине постоянного тока, и поэтому инвертор можно назвать двухуровневым инвертором. Наиболее распространенный трехуровневый инвертор с так называемой фиксацией нейтрали показан на рис. 4.15. Каждая ветвь инвертора состоит из четырех полупроводниковых переключателей питания, Sj — S4, с диодами свободного хода, Dt — D4, и двух ограничивающих диодов, D5 и D6, которые предотвращают короткое замыкание конденсаторов промежуточного звена постоянного тока. Линия постоянного тока основана на двух входных конденсаторах Q, образующих емкостной делитель напряжения, и входной катушке индуктивности L4 (опционально).
Хотя наличие 12 полупроводниковых переключателей питания в трехуровневом инверторе подразумевает очень большое количество возможных состояний инвертора, на практике используются только 27 состояний. В частности, каждая ветвь инвертора может принимать одно из трех следующих состояний: (1) SI и S2 включены, S3 и S4 выключены; (2) S2 и S3 включены, SI и S4 выключены; и (3) SI и S2 выключены, S3 и S4 включены. Видно, что входное постоянное напряжение V {всегда подается на пару последовательно соединенных переключателей.Следовательно, номинальное напряжение трехуровневого инвертора может быть вдвое выше номинального напряжения переключателей.
Все описанные инверторы характеризуются жестким переключением, то есть каждый полупроводниковый переключатель отключается при прохождении ненулевого тока и включается при ненулевом напряжении. В результате каждое переключение связано с определенной потерей энергии. Высокие частоты переключения, необходимые для высокого качества выходного тока, снижают КПД инвертора. Сторона
РИСУНОК 4.15 Трехуровневый инвертор с фиксацией нейтрали.
Эффекты жесткого переключения, такие как излучаемые электромагнитные помехи (EMI) или перенапряжения в длинных кабелях, соединяющих инвертор с нагрузкой, также являются проблемой. Поэтому большое количество исследований и разработок было посвящено инверторам с плавным переключением. Как правило, можно выделить два типа мягкого переключения: переключение при нулевом напряжении (ZVS) и переключение при нулевом токе (ZCS). За последнее десятилетие было разработано множество топологий инверторов с мягким переключением.
В классическом инверторе с резонансным звеном постоянного тока (RDCL), показанном на рисунке 4.16, используется принцип ZVS.
Выпрямитель питания с конденсатором цепи постоянного тока C1 и катушкой индуктивности Lx (опционально) составляет источник постоянного напряжения для инвертора. Катушка индуктивности L2 и конденсатор C2 образуют резонансный контур, резонанс в котором запускается одновременным включением обоих переключателей в ножке инвертора с последующим выключением. Когда напряжение на конденсаторе C2 достигает нуля, для переключателей инвертора создаются условия ZVS.Активный фиксатор на основе конденсатора C3 и переключателя S используется для ограничения резонансных импульсов выходного напряжения. Без фиксатора импульсы напряжения, амплитуда которых значительно превышает напряжение питания постоянного тока, наложили бы неоправданно высокие требования к номинальному напряжению на переключатели и диоды инвертора.
Одна фаза (фаза A) вспомогательного инвертора с резонансной коммутацией полюсов (ARCP) показана на рисунке 4.17. Конденсаторы Q и C2 образуют звено постоянного тока. Для минимизации высоких динамических нагрузок на главные переключатели SA и SA ’используется резонансный демпфер на основе катушки индуктивности LA и конденсаторов CA1 и CA2.Резонанс запускается при включении
РИСУНОК 4.16 Резонансный инвертор звена постоянного тока.
РИСУНОК 4.1 7. Одна фаза вспомогательного резонансного коммутируемого инвертора полюсов.
Двунаправленный переключатель, состоящий из вспомогательных переключателей SA1 и SA2 и их встречно-параллельных диодов DA1 и DA2. Это позволяет создать условия ZVS для главных выключателей. Вспомогательные переключатели включаются и выключаются в условиях ZCS. Инверторы
ARCP, обычно рассчитанные на высокую мощность (более 1 МВА), обеспечивают высокоэффективное преобразование мощности.В отличие от инвертора RDCL, формы выходного напряжения которого состоят из пакетов резонансных импульсов, инвертор ARCP поддерживает истинную широтно-импульсную модуляцию. Как правило, IGBT (биполярные транзисторы с изолированным затвором) или GTO (тиристоры отключения затвора) используются в качестве основных переключателей, в то время как MCT (тиристоры, управляемые MOSFET) или IGBT служат в качестве вспомогательных переключателей.
Испытания асинхронных двигателей
Испытание асинхронного двигателя (стандартное испытание или испытание FAT) выполняется после завершения сборки производителем, чтобы доказать, что двигатель имеет те же технические характеристики, которые требуются в заказе на поставку.
Если применимо испытание под нагрузкой, эффективность определяется методом E1 IEEE 112. Если испытательная установка не способна провести испытание на повышение температуры при полной нагрузке, испытание проводится при пониженной мощности с экстраполяцией результатов до номинальных значений. Используются такие параметры испытания двигателя, как полная нагрузка, холостой ход, крутящий момент заблокированного ротора и т. Д., Как определено в IEC60034-1 и IEC60034-2.
Испытание на сопротивление холодной обмотки
Целью данного испытания при испытании асинхронного двигателя является измерение сопротивления обмоток статора, ротора и возбудителя, чтобы убедиться, что значения, рассчитанные при 20 ° C (окружающей среды), соответствуют техническим характеристикам.Эти значения используются для расчета повышения температуры. Сопротивления измеряются вольтамперометрическим методом при температуре окружающей среды.
Проверка выполняется генератором тока (более 10 А постоянного тока) и вольтметром. Критерии приемки должны основываться на утвержденной производителем процедуре, но обычно межфазное отклонение не должно превышать 2%, а максимальное отклонение от теоретического значения не должно превышать 5%.
Тест сопротивления датчика температуры
Этот тест проводится для проверки целостности и однородности каждого датчика температуры, определенного на 100 Ом для 0 ° C.Для измерения используется мультиметр или датчик прямого считывания температуры. Критерии приемки зависят от процедуры испытания, но обычно не должны превышать +/- 2 ° по Цельсию
Температурный тест подшипника
Температура подшипников часто измеряется во время работы асинхронного двигателя. Зарегистрированная температура не должна выходить за пределы допустимого диапазона, указанного в методике испытаний или в паспорте двигателя. Также должны быть проверены аномальные вибрации и шум.
Повышение температуры подшипников без нагрузки
Асинхронный двигатель должен работать при номинальном напряжении и частоте, и температура каждого подшипника измеряется периодически.Естественно, со временем температура подшипника повысится. Повышение температуры не должно быть больше указанного в процедуре испытания асинхронного двигателя или в паспорте двигателя. Процедура определяет время работы и интервалы считывания температуры.
Кривая холостого хода и характеристики потерь при текущих испытаниях асинхронного двигателя
Ротор должен поработать некоторое время, чтобы стабилизировать температуру подшипников и другие параметры. Затем напряжение повышается до 120% от номинального значения при номинальной скорости двигателя.Взяты две точки данных.
Затем напряжение снижается до 110% и берется еще 1 точка данных. Этот процесс продолжается до 60% номинального напряжения, и снимаются несколько точек данных. Напряжение между фазами, ток по фазе и потребляемая мощность должны измеряться в каждой точке данных. Измерение может быть выполнено анализатором мощности. Электрический расчет сделан для получения фактических потерь.
Критерии приемки должны основываться на утвержденной поставщиком методике текущих испытаний двигателя, но обычно рассчитанные потери должны быть менее 110% от теоретических потерь.
Испытание на превышение скорости при испытании асинхронного двигателя
Испытание на превышение скорости выполняется, чтобы убедиться, что скорость ротора может достигать 1,2-кратного значения номинальной скорости за 2 минуты. Для измерения скорости ротора используется спидометр, при этом не должно наблюдаться особого шума, чрезмерной вибрации и аномального повышения температуры.
Вибрация подшипника в условиях холостого хода
Испытание подшипника на вибрацию выполняется, когда ротор работает без нагрузки, а амплитуда скоростной вибрации измеряется в горизонтальном, вертикальном и осевом направлениях.Для измерения используется датчик скорости или акселерометр. Акселерометр измеряет виброускорение, а не скорость. Если используется, программа преобразует ускорение в скорость, применяя расчет.
Приемлемость испытания должна быть проверена на соответствие критериям приемки в процедуре стандартного испытания асинхронного двигателя, но обычно амплитуда не должна превышать 2,5 мм / с или 0,098 дюйма / с (среднеквадратичное значение).
Проверка тока и крутящего момента заторможенного ротора (SC / FLC и ST / FLT)
Целью проверки при текущих испытаниях двигателя является расчет коэффициента мощности, пускового тока и пускового момента.Тест проводится при заблокированном роторе. Пусковой ток может быть высоким, и испытание обычно проводится при более низком напряжении, а результат испытания экстраполируется на номинальное напряжение.
Для измерения используется анализатор мощности. После измерения рассчитывается отношение пускового тока к току полной нагрузки и пускового момента к моментам полной нагрузки (SC / FLC и ST / FLT). Расчетные значения должны быть проверены на соответствие критериям приемки, предусмотренным в утвержденной процедуре испытания асинхронного двигателя.
Проверка уровня шума
Двигатель должен работать при номинальном напряжении и частоте вращения ротора в условиях холостого хода, а уровень шума следует измерять в 8–12 точках в зависимости от размера двигателя и в передней части двигателя на расстоянии 1 метра от двигателя. Уровень шума обычно не должен превышать 80 дБА, но измеренное значение должно быть проверено в соответствии с критериями приемки, указанными в таблице данных или методике испытаний.
Испытание на нагрев при испытании асинхронного двигателя
В этом испытании машина соединена с соответствующим вращающимся оборудованием, таким как насос, вентилятор, компрессор и т. Д.затем нагрузка прилагается к ротору.
Все переменные, такие как ток, напряжение, мощность, температура статора, температура подшипников, измеряются при запуске, а также каждые 30 минут в соответствии с процедурой испытания. Для измерений используются анализатор мощности и температурный прибор.
После термостабилизации (температуры подшипников) двигатель останавливается, и измеряется сопротивление горячего статора, а рост температуры рассчитывается на основе следующих параметров:
- Температура обмотки в холодном состоянии
- Температура обмотки в конце испытания
- Температура охлаждающей жидкости в конце испытания
- Сопротивление статора между фазами в холодном состоянии
- Сопротивление статора между фазами в конце испытания
Уровень повышения температуры статора должен быть проверен на основе критериев приемки, указанных в протоколе / процедуре текущего испытания асинхронного двигателя.Этот тест является ключевым при тестировании асинхронного двигателя.
Испытание сопротивления изоляции
Испытание является одним из важных при текущих испытаниях асинхронного двигателя и проводится для измерения сопротивления изоляции обмотки якоря, полюсов возбуждения, датчиков, обогревателя и подшипников (если применимо).
На обмотку и корпус, к которым подключены магнитная цепь и другие обмотки, приложено постоянное напряжение. В случае, если емкость статора слишком велика для прибора, измерение может быть выполнено поэтапно при размыкании нейтрали.Для основных обмоток это измерение выполняется дважды, до и после испытания диэлектрической прочности. Измеренные значения сопротивления должны быть проверены в соответствии с критериями приемки, предусмотренными в процедуре испытания.
Вернуться на осмотр асинхронного двигателя
Вы нашли эту статью полезной? Нажмите ниже кнопки Like и G + 1!
На рисунке 1 показан график зависимости крутящего момента асинхронного двигателя от скорости от нуля до синхронной скорости.Эта кривая называется характеристической кривой крутящий момент-скорость. Мы можем вывести уравнение из эквивалентной схемы, которое позволяет рассчитать крутящий момент для заданного значения скольжения.
РИСУНОК 1 Кривые характеристики скорости асинхронного двигателя.
На рисунке 2 показана эквивалентная схема статора. Мы можем упростить наши вычисления, заменив его эквивалентом Тевенина, чтобы у нас не было параллельных ветвей в эквивалентной схеме.На рисунке 3 показан эквивалент статора Тевенина. Напряжение Тевенина, V 1a , равно E 1 на рисунке 2.
РИСУНОК 2 Эквивалентная схема статора асинхронного двигателя.
РИСУНОК 3 Thevenin эквивалент статора асинхронного двигателя.
Ссылаясь на эквивалентную схему статора и применяя деление напряжения, напряжение Тевенина можно рассчитать как:
\ [\ begin {matrix} \ left | {{V} _ {1a}} \ right | = \ left | {{V} _ {1}} \ right | \ frac {{{X} _ {m}}} {\ sqrt {R_ {s} ^ {2} + {{\ left ({{X} _ {s }} + {{X} _ {m}} \ right)} ^ {2}}}} & {} & \ left (1 \ right) \\\ end {matrix} \]
Импеданс Тевенина, R e1 + jX e1 , получается заменой источника напряжения, показанного на рис. 2, с коротким замыканием и последующим вычислением импеданса, глядя на схему.Возвращаясь к схеме статора, мы находим реактивное сопротивление намагничивания параллельно импедансу обмотки статора:
\ [\ begin {matrix} {{Z} _ {e1}} = \ frac {\ left ({{R} _ {s}} + j {{X} _ {s}} \ right) \ times j {{X} _ {m}}} {{{R} _ {s}} + j \ left ({{X} _ {s}} + {{X} _ {m}} \ right)} & {} & \ left (2 \ right) \\\ end {matrix} \]
Найдя тевенинский эквивалент статора, мы можем добавить к нему схему ротора. На рисунке 4 показана схема ротора, соединенная с эквивалентом статора и намагничивающей ветви по Тевенину.Поскольку эта схема состоит из двух последовательно соединенных импедансов, мы можем легко вычислить ток ротора в терминах V 1e (и, следовательно, V 1 ). Используя ток ротора, мы можем рассчитать крутящий момент непосредственно как функцию скольжения.
Импульсный линейный асинхронный двигатель — Введение
< >
Импульсный реактивный двигатель обречен на низкую энергоэффективность. Как насчет использования linear индукционный двигатель дизайн вместо? Это многообещающе, поскольку не ограничивается насыщение железа при напряженности поля около 1 Тесла.
Браам Дэниелс — талантливый студент-инженер. в Университете Кейптауна, Южная Африка. Он разработал и построил PLIM с низким энергопотреблением, но что более важно, он написал блестящую дипломную работу. Браама статья публикуется здесь с его разрешения и при поддержке.
Импульсный линейный асинхронный двигатель
Абстрактные
«А небольшой одноступенчатый импульсный коаксиальный линейный асинхронный двигатель был разработан и сконструирован для проверки компьютерное моделирование, использованное в его разработке, и для определения осуществимости концепция работы при низких напряжениях и потребляемой энергии 400 вольт и 25 джоулей соответственно.Пригодность биполярного транзистора с изолированным затвором (IGBT) в такой пусковой системе была также исследовали. Кроме того, в системе используются спиральные катушки якоря с проволочной обмоткой, а не обычные токопроводящие кольца для значительного увеличения взаимной индукции между статором и арматура.
Исследование проводилось на основе подробного и краткого обзора литературы. информация о теоретическом моделировании системы и важных конструктивных соображениях.Информация была получена из исследований, опубликованных в IEEE Transactions on Magnetics и других подобных материалах. журналы, дополненные многочисленными книгами, техническими описаниями устройств и заметками по применению.
На практике работа устройства сравнивалась с теоретической моделью в основном с точки зрения величины тока в цепи резервуара, частоты колебаний и качественных наблюдений механические характеристики. Несмотря на то, что большая часть теоретической модели в некоторой степени проверена, Этот проект показал, что импульсные коаксиальные линейные асинхронные двигатели неэффективны, если спроектированы работать при низких напряжениях.Также делается вывод, что идеализированные допущения, игнорирующие механическое трение и, в частности, сопротивление IGBT в открытом состоянии в этих низкие энергозатраты »
Обзор
Конечная цель — построить шестиступенчатую пусковую установку с общим накоплением энергии около 150 джоулей. Этот проект является только первым этапом (около 25 джоулей) технико-экономического обоснования.
асинхронный двигатель имеет специальные конденсаторы; выбирая полипропиленовые конденсаторы, система делает не требуются антипараллельные защитные диоды.Это позволяет совершать полные колебания без повреждения конденсаторы. Именно этот «звон» важен для асинхронных двигателей. Эти AC Конденсаторы обычно используются для запуска и запуска двигателей в диапазоне от 100 до 500 В переменного тока. Однако цены обычно составляют 2 доллара США за джоуль по сравнению с обычными электролитическими конденсаторами. $ 0,20 + долл. США за джоуль на избыточном рынке.
Это Конденсаторная батарея состоит из шести параллельных полипропиленовых конденсаторов по 50 мкФ, рассчитанных на 400 вольт.Каждый конденсатор может хранить 4,2 Джоулей, что дает общую энергию ступени 25,2 Дж при максимальном заряде. Большинство тестов было сделано при более низких напряжениях, чтобы защитить систему до полного анализа. Что интересно, его первоначальные «шинные» соединения были построены из гофрированных наконечников лопатки, но это оказалось чтобы добавить несколько миллиомов сопротивления, и были заменены большими сплошными полосами, как показано на этом Фото.
Чтобы избежать потерь из-за скин-эффекта, система предназначена для ограничения частот до 3.2 кГц или Меньше. Скин-эффект на более высоких частотах приведет к потерям из-за уменьшения эффективного токопроводящая площадь в проводе, и от «мертвого веса» меди на якоре катушка. Он вывел дифференциальные уравнения состояния (подробно описанные в его PDF-файле) для системы на основе о методах моделирования, найденных в журналах IEEE. Эти уравнения позволяют моделировать весь система, по которой можно оценить резонансную частоту и другие показатели качества.
После Анализ и моделирование, цель заключалась в достижении эффективности на первом этапе 3,5%. Это кажется разумный, если не консервативный, и ожидается, что это достижимая цифра. Некоторые ссылки на литературу предполагают, что операционная эффективность выше 50% может быть достигнута, хотя, возможно, не в первую очередь этап. КПД 3,5% выше, чем у типичных катушек с переключаемым сопротивлением, и, вероятно, намного ниже того, что в конечном итоге может быть построено.
В исследуемой литературе сообщается, что оптимизационные модели обычно сходятся на пары, которые имеют более или менее одинаковую длину, в дополнение к тому, что обе катушки тонкие, а не толстый.Браам исследовал различные размеры вокруг этой точки, чтобы найти локальный оптимум для желаемого размер койлгана. Он предполагает, что алгоритм заводчика для оптимизации был бы ценным дополнением. к методам анализа.
Статор (показан справа) построен на тонкостенном цилиндре из плексигласа. Катушка якоря образует (слева) были рассчитаны на минимальный вес при соблюдении требований к прочности. Его тезис объясняет, как анализировать сжимающие силы, ожидаемые во время запуска.
ТезисБраама содержит большое количество деталей и выводов, и любой, кто планирует Для создания PLIM было бы полезно внимательно изучить его.
Результаты
Первым результатам помешали сбои в IGBT, что привело к тщательной переработке конструкции цепи запуска полупроводников. Но что более важно, коэффициент демпфирования был больше, чем желательно, видимо, из-за потерь в кремниевом переключателе. Однако это согласуется с симуляциями. это показало, что сопротивление цепи небольшого бака даже 25 миллиом (без учета обмотки статора 11 мОм) приведет к чрезмерному демпфированию и, как следствие, к снижению производительности.
Окончательные результаты с усовершенствованием триггера IGBT оказались неутешительными. Арматура двигалась, но недостаточно, чтобы получить значимые измерения кинетической энергии.
Позднее тестирование после завершения диссертации было гораздо более обнадеживающим. Braam заменил IGBT с механическим контактором большой площади. Это заслуживает гораздо большего внимания и разработка для улучшения характеристик койлганов PLIM.
На мой взгляд, я уверен, что есть хорошие эффективные медные переключатели для сильноточных и высоковольтных такие приложения.Конечно, механический переключатель полезен только на первом этапе, и будут неэффективны на последующих этапах из-за медленного времени отклика.