
ШИМ-контроллер. Устройство и принцип работы.
В далекие, теперь уже времена прошлого века, в блоках питания для понижения или повышения напряжения применялись линейные трансформаторы. Диодный мост и электролитический конденсатор сглаживал пульсацию. Далее напряжение стабилизировалось линейными или интегральными стабилизаторами. Вес таких источников питания был достаточно большой, ничуть не меньше были и габариты. Чем большая мощность требовалась от БП, тем в несколько раз был объемнее и тяжелее сам блок питания.
Если заглянуть в современную бытовую технику, то сейчас вы увидите импульсный источник питания, или блок питания – сокращенно ИБП. В таких модулях питания используется в качестве управления специальная микросхема-контроллер Широтно-импульсной модуляции, или сокращенно ШИМ. Здесь мы и поговорим об устройстве и назначении этого элемента.
Преимущества и определения ШИМ-контроллераШИМ-контроллер это совокупность нескольких функциональных
схем для того чтобы управлять выходными силовыми каскадами, собранными обычно
на транзисторах.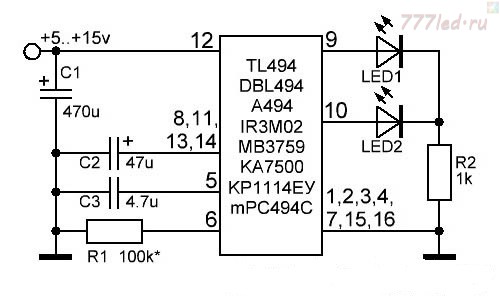
В литературе и интернет источниках можно встретить случаи, когда ШИМ-контроллерами называют различные генераторы сигналов с регулировкой широты импульса, НО без обратной связи! К таким генераторам (на NE555 и др.) не совсем корректно применять понятие контроллер, скорее регулятор или генератор.
Широтно-импульсная модуляция – это тот метод, когда сигнал модулируется не с помощью изменения амплитуды или частоты, а с помощью длительности импульса. Далее, после интеграции импульсов при помощи LC-фильтров происходит сглаживание модулированного сигнала.
Характеристики ШИМ.
Для Широтно-модулированного сигнала характеристик всего две:
- Частота следования импульсов
- Скважность импульсов, или коэффициент заполнения.
 По сути это одно и то же. Разница лишь в обозначении: для скважности -это D, для заполнения используем литеру S. Коэффициент заполнения = единица / период сигнала T
По сути это одно и то же. Разница лишь в обозначении: для скважности -это D, для заполнения используем литеру S. Коэффициент заполнения = единица / период сигнала T
 По сути это одно и то же. Разница лишь в обозначении: для скважности -это D, для заполнения используем литеру S. Коэффициент заполнения = единица / период сигнала T
По сути это одно и то же. Разница лишь в обозначении: для скважности -это D, для заполнения используем литеру S. Коэффициент заполнения = единица / период сигнала TS=1/T
T – Период сигнала
T=1/f
D=T/1=1/S
F – Частота сигнала
Таким образом, коэффициент заполнения ничто иное как интервал от периода сигнала. Отсюда следует что он (коэффициент заполнения) всегда будет меньше единицы, что не скажешь о скважности – она всегда будет больше 1.
Возьмем пример:
Частота сигнала = 50 кГц.
Период сигнала = 20 мкс.
Теперь предположим, что ключ выхода ШИМ открывается на 4 мкс. Коэффициент заполнение составит минус 20%, а скважность будет равна 5.
Конечно же, в расчет необходимо брать конструкцию ШИМ, исходя из количества силовых ключей.
Отличительные особенности импульсных и линейных БП.
Существенным преимуществом импульсных источников питания перед линейными является хороший КПД (около 90%)
Структура ШИМ
Давайте рассмотрим структуру любого ШИМ-контроллера. Хоть в своем огромном семействе разные ШИМ-ы и обладают дополнительными функциональными особенностями, но все же они все похожи.
Заглянув в микросхему, мы увидим полупроводниковый кристалл, в котором находятся следующие функциональные составляющие:
- Генератор последовательных импульсов.
- Источник опорного напряжения.
- Схема обратной связи (ОС), усилитель ошибки.
- Генератор прямоугольных импульсов, управляющий транзисторами, которые в свою очередь коммутируют силовые ключевые каскады.
Количество этих ключей, зависит от предназначения самого ШИМ-контроллера. Например, простые обратноходовые схемы построены на 1-м силовом ключе, полу мостовые на 2-х, а мостовые преобразователи на 4-х ключах.
Выбирая ШИМ-контроллер необходимо исходит из того какой ключ
используется. Например, если в блоке питания в качестве выходного каскада стоит
биполярный транзистор, то подойдет большая часть контроллеров. Связано это с
тем, что управлять таким силовым ключом достаточно просто – подавая импульсы на
базу транзистора, мы открываем и закрываем его.
Например, если в блоке питания в качестве выходного каскада стоит
биполярный транзистор, то подойдет большая часть контроллеров. Связано это с
тем, что управлять таким силовым ключом достаточно просто – подавая импульсы на
базу транзистора, мы открываем и закрываем его.
А вот если мы будем использовать полевые транзисторы с изолированным затвором (MOSFET) или IGBT транзисторы, то здесь уже немного сложнее. Выходной транзистор-ключ мало того что нужно открыть – путем заряда затвора, так нам его еще надо и закрыть, естественно разряжая затвор ключа. Для таких схем используются соответствующие ШИМ-контроллеры. У них на выходе стоит 2 транзистора – один заряжает затвор ключа, а другой разряжает, замыкая его на землю.
На заметку:
Многие ШИМ-контроллеры совмещаются с силовыми ключами в один корпус. Если этот контроллер для маломощного блока питания, то выходные транзисторы устанавливаются прямо в микросхему контроллера.
В случае же если блок питания достаточно мощный, то
интеграция происходит в обратную сторону – микросхема ШИМ-контроллер
устанавливается в корпус силового ключа.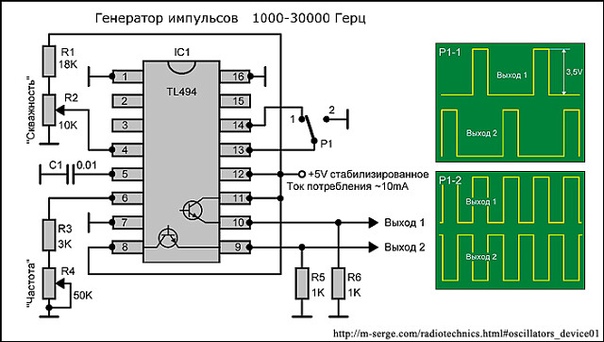 Такую микросхему легко установить на
радиатор. Соответственно количество выводов у такой микросхемы не как у
транзистора.
Такую микросхему легко установить на
радиатор. Соответственно количество выводов у такой микросхемы не как у
транзистора.
Грубо говоря, ШИМ-контроллер представляет собой компаратор, на один из входов которого приходит сигнал обратной связи, на другой пилообразный сигнал генератора. Когда первый по амплитуде превышает второй, на выходе формируется импульс.
Тем самым ширина импульса на выходе зависит от соотношения входных сигналов. Предположим, что мы подключили более мощную нагрузку к выходу БП, и напряжение дало просадку. На обратной связи будет тоже падение. Что же произойдет?
В периоде сигнала начнет преобладать пилообразный сигнал, длительность импульсов на выходе увеличится и напряжение компенсируется. Происходит это все в доли секунды.
Частота работы генератора ШИМ-а задается RC-цепью
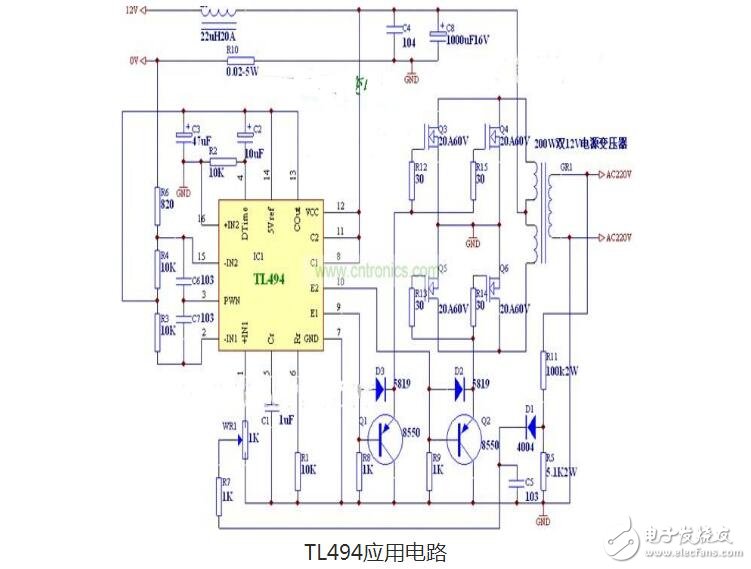
Пример использования ШИМ-контроллера на базе TL494 –
довольно распространённой микросхемы. Далее рассмотрим назначение отдельных
выводов этой микросхемы.
- Vcc (Ucc, Vss)– вывод питания микросхемы.
- GND (Ground – земля) – земля или общий провод
- OUT – выход контроллера. С этого вывода и выходит управляющий сигнал для переключения ключей. Иногда выходные выводы обозначают HO и LO (для полумоста)
- Vc (Uc) – Вывод контролирующий питание. При пониженном питании возможен перегрев и выход из строя ключей. Контрольный вывод заблокирует работу контроллера в таком случае.
- Vref – опорное напряжение, чаще всего на этот вывод вешается конденсатор, соединенный с землей.
- ILIM – сигнал с измерителя тока. Соединен с обратной связью для ограничения тока.
- ILIMREF – регулировочный вывод для сработки по току
- SS – мягкий старт контроллера. Используется для плавного запуска блока питания и выхода в штатный режим работы.
- RtCt – выводы RC-цепи, которая и задает частоту работы ШИМ.
- CLOCK – выходной сигнал тактовых синхроимпульсов. Предназначен для синхронизации работы нескольких ШИМ-контроллеров в одной схеме.
- RAMP – сравнивающий вывод. На нем присутствует пилообразный сигнал генератора и сигнал обратной связи для формирования ШИМ -сигнала.
- INV и NOINV – входы компаратора, формирующие сигнал усилителя ошибки. От величины напряжения на INV зависит длительность импульса ШИМ.
- EAOUT – дополнительный выход усилителя ошибки.

Для того чтобы закрепить сказанное выше рассмотрим пару примеров использования ШИМ-контроллеров, а так же их схем включения. Сделаем это на примере микросхем:
Эти микросхемы часто используются в различных блоках питания, в том числе и компьютерных. Когда дело доходит до переделки компьютерного блока питания в лабораторный бп или зарядное устройство для аккумулятора, то, как раз стараются подобрать бп на TL494.
Обзор ШИМ TL494
Технические характеристики ШИМ-контроллера TL494
Ниже на рисунке дана распиновка TL494:
- Неинвертирующий вход первого компаратора ошибки
- Инвертирующий вход первого компаратора ошибки
- Вход обратной связи
- Вход регулировки мертвого времени
- Вывод для подключения внешнего времязадающего конденсатора
- Вывод для подключения времязадающего резистора
- Общий вывод микросхемы, минус питания
- Вывод коллектора первого выходного транзистора
- Вывод эмиттера первого выходного транзистора
- Вывод эмиттера второго выходного транзистора
- Вывод коллектора второго выходного транзистора
- Вход подачи питающего напряжения
- Вход выбора однотактного или же двухтактного режима работы микросхемы
- Вывод встроенного источника опорного напряжения 5 вольт
- Инвертирующий вход второго компаратора ошибки
- Неинвертирующий вход второго компаратора ошибки
Обзор микросхемы UC3843
Еще одна популярная микросхема используемая в качестве ШИМ-контроллеров компьютерных и не только блоков питания – это микросхема 3843.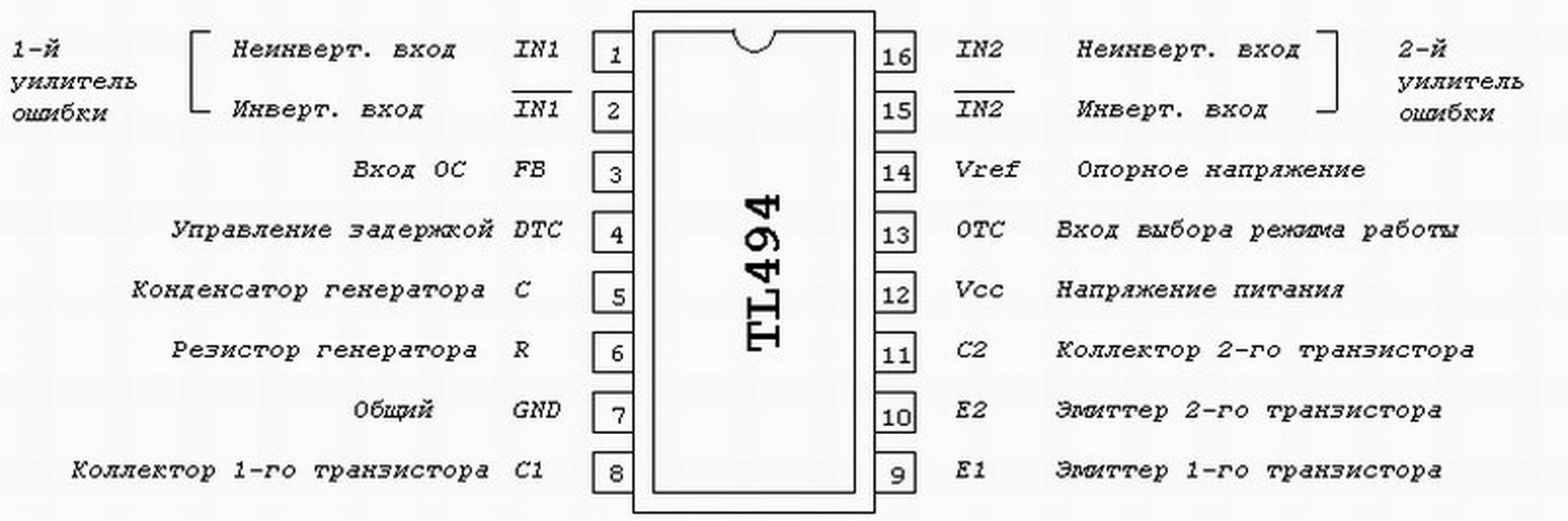 распиновка её находится ниже. Как видно, у нее 8 выводов, но функции такие же как у TL949. Можно встретить эту микросхему в 14-выводном корпусе и часть выводов у неё (NC) – то есть не используется.
распиновка её находится ниже. Как видно, у нее 8 выводов, но функции такие же как у TL949. Можно встретить эту микросхему в 14-выводном корпусе и часть выводов у неё (NC) – то есть не используется.
Рассмотрим назначение выводов:
- Вход компаратора (усилителя ошибки).
- Вход напряжения обратной связи. Это напряжение сравнивается с опорным внутри ИМС.
- Датчик тока. Подключается к резистору стоящему в между силовым транзистором и общим проводом. Нужен для защиты от перегрузок.
- Времязадающая RC-цепь. С её помощью задаётся рабочая частота ИМС.
- Общий.
- Выход. Управляющее напряжение. Подключается к затвору транзистора, здесь двухтактный выходной каскад для управления однотактным преобразователем (одним транзистором), что можно наблюдать на рисунке ниже.
- Напряжение питания микросхемы.
- Выход источника опорного напряжения (5В, 50 мА)
Структура микросхемы UC3843
Можно заметить, что и эта микросхема тоже похожа на все остальные ШИМ-контроллеры.
Простой блок питания на UC3842
Микросхема ШИМ с силовым ключом в одном корпусе
Подобные ШИМ-контроллеры используются как в импульсных блоках питания на базе импульсного трансформатора, так и в DC-DC понижающих или повышающих преобразователях.
Можно привести в пример одну из самых распространенных микросхем в этом сегменте – LM2596. На её базе можно найти большое количество схем преобразователей, в том числе и изображенная ниже.
LM2596 включает в себя все технические решения, описанные выше, плюс в неё еще интегрирован силовой ключ на ток до 3 Ампер.
Структура микросхемы LM2596
Как можно увидеть больших отличий от микросхем, которые мы рассматривали ранее в ней нет.
Еще один пример блока питания для светодиодных лент на ШИМ-контроллере 5L0380R – У неё всего 4 вывода. Как можно заметить в схеме отсутствует силовой ключ. Естественно он в микросхеме, а сама микросхема выполнена в корпусе транзистора и крепится на радиатор.
Изучая ШИМ-контроллеры можно сделать несколько выводов: Если мы имеем дело с мощным источником питания и нам необходима достаточная гибкость использования этого контроллера, то такая микросхема как TL494 (и подобные) подходит для таких задач лучше. А если блок питания средней и невысокой мощности, то вполне свою роль выполнят ШИМ-контроллеры с интегрированными в них силовыми ключами. В таких бп нет больших требований к пульсациям и помехам, а выходные цепи можно сгладить фильтрами. Обычно это блоки питания для бытовой техники, светодиодных лент, ноутбуков, зарядных адаптеров.
И напоследок.
Ранее мы уже говорили о том, что ШИМ-контроллер это механизм, который на
базе сформированных импульсов за счет изменения ширины импульсов формирует
среднее значение напряжения управляемое с цепей обратной связи. Хочу заметить,
что классификация и название у каждого автора могут быть абсолютно разными.
ШИМ-контроллером могут называть простой регулятор напряжения. В то же время сам
ШИМ-контроллер в блоке питания может быть назван – “блокинг-генератор”,
“интегральный субмодуль”, “задающий генератор” От того как
его назвал тот или иной автор суть не меняется, но могут возникнуть непонимания
и разночтения.
В то же время сам
ШИМ-контроллер в блоке питания может быть назван – “блокинг-генератор”,
“интегральный субмодуль”, “задающий генератор” От того как
его назвал тот или иной автор суть не меняется, но могут возникнуть непонимания
и разночтения.
Микросхемы ШИМ-контроллера KA3842, UC3842, UC2842
Микросхемы ШИМ-контроллера ka3842 или UC3842 (uc2842) является самой распространенной при построении блоков питания для бытовой и компьютерной техники, часто используется для управления ключевым транзистором в импульсных блоках питания.
Принцип работы микросхем ka3842, UC3842, UC2842
Микросхема 3842 или 2842 представляет собой ШИМ — Широтно-импульсная модуляция (ШИМ, англ. pulse-width modulation (PWM)) преобразователь, в основном применяется для работы в режиме DC-DC(преобразовывает постоянное напряжение одной величины в постоянное напряжение другой) преобразователя.
Рассмотрим структурную схему микросхем 3842 и 2842 серий:
На 7 вывод микросхемы подается напряжение питания в диапазоне от 16 Вольт до 34. Микросхема имеет встроенный триггер Шмидта (UVLO), который включает микросхему, если напряжение питания превышает 16 Вольт, и выключает если напряжение питания по каким-либо причинам станет ниже 10 Вольт. Микросхемы 3842 и 2842 серий также обладает защитой от перенапряжения: если напряжение питания превысит 34 Вольта, микросхема отключится. Для стабилизации частоты генерации импульсов микросхема имеет внутри свой собственный 5 вольтовый стабилизатор напряжения выход которого подключен к выводу 8 микросхемы. Вывод 5 масса (земля). На 4 выводе задается частота импульсов. Достигается это резистором RT и конденсатором CT подключенных к 4 выв. — смотрите типовую схему включения ниже.
Микросхема имеет встроенный триггер Шмидта (UVLO), который включает микросхему, если напряжение питания превышает 16 Вольт, и выключает если напряжение питания по каким-либо причинам станет ниже 10 Вольт. Микросхемы 3842 и 2842 серий также обладает защитой от перенапряжения: если напряжение питания превысит 34 Вольта, микросхема отключится. Для стабилизации частоты генерации импульсов микросхема имеет внутри свой собственный 5 вольтовый стабилизатор напряжения выход которого подключен к выводу 8 микросхемы. Вывод 5 масса (земля). На 4 выводе задается частота импульсов. Достигается это резистором RT и конденсатором CT подключенных к 4 выв. — смотрите типовую схему включения ниже.
6 вывод – выход ШИМ импульсов. 1 вывод микросхемы 3842 служит для обратной связи, если на 1 выв. напряжение занизить ниже 1 Вольта, то на выходе (6 выв.) микросхемы будет уменьшаться длительность импульсов, тем самым уменьшая мощность шим преобразователя. 2 вывод микросхемы, как и первый, служит для уменьшения длительности импульсов на выходе, если напряжение на выводе 2 выше +2,5 Вольт, то длительность импульсов уменьшится, что в свою очередь снизит выдаваемую мощность.
Микросхему с наименованием UC3842 кроме UNITRODE выпускают фирмы ST и TEXAS INSTRUMENTS, аналогами этой микросхемы являются: DBL3842 фирмы DAEWOO, SG3842 фирмы MICROSEMI/LINFINITY, KIA3842 фирмы КЕС, GL3842 фирмы LG, а также микросхемы других фирм с различными литерами (AS, МС, IP и др.) и цифровым индексом 3842.
Схема импульсного блок питания на базе ШИМ-контроллера UC3842
Принципиальная схема 60 Ваттного импулсного блока питания на базе ШИМ-контролера UC3842 и силовом ключе на полевом транзисторе 3N80.
Микросхема ШИМ-контроллера UC3842 — полный datasheet с возможностью скачать бесплатно в pdf формате или смотреть в онлайн справочнике по электронным компонентам на Времонт.su
| САМОДЕЛЬНЫЕ КОЛОНКИ ДЛЯ ТЕЛЕФОНА |
| ПОКУПКА КИТАЙСКИХ СВЕТОДИОДНЫХ ЛАМП | ТРАНЗИСТОРЫ ДЛЯ РАДИОЖУЧКОВ |

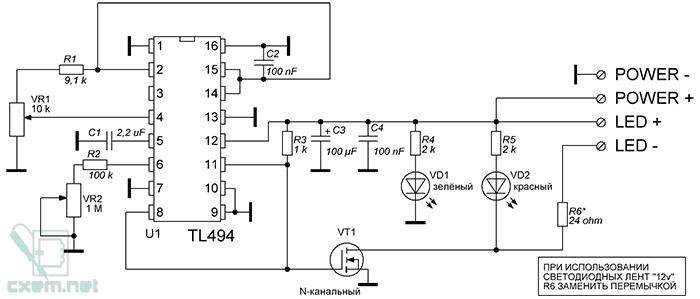
 Транзистор ставить в зависимости от мощности нагрузки.
Транзистор ставить в зависимости от мощности нагрузки. Когда вращаем переменный резистор R1, у нас меняются соотношения сопротивлений верхнего и нижнего плеча. Что, соответственно, меняет отношение длины импульса к паузе. Частота задается в основном конденсатором С1 и еще немного зависит от величины сопротивления R1. Меняя отношение сопротивлений заряда/разряда – меняем скважность. Резистор R3 обеспечивает подтяжку выхода к высокому уровню — так так там выход с открытым коллектором. Который не способен самостоятельно выставить высокий уровень.
Когда вращаем переменный резистор R1, у нас меняются соотношения сопротивлений верхнего и нижнего плеча. Что, соответственно, меняет отношение длины импульса к паузе. Частота задается в основном конденсатором С1 и еще немного зависит от величины сопротивления R1. Меняя отношение сопротивлений заряда/разряда – меняем скважность. Резистор R3 обеспечивает подтяжку выхода к высокому уровню — так так там выход с открытым коллектором. Который не способен самостоятельно выставить высокий уровень. В результате рассеивается большая мощность, на нагрев. Желательно схему параллелить по выходу конденсаторами большой емкости, иначе будет петь и плохо регулировать. Чтобы не свистел – подбирайте С1, свист часто идет от него. В общем область применения очень широкая, особенно перспективным будет её использование в качестве регулятора яркости мощных светодиодных ламп, LED лент и прожекторов, но про это в следующий раз. Статья написана при поддержке ear, ur5rnp, stalker68.
В результате рассеивается большая мощность, на нагрев. Желательно схему параллелить по выходу конденсаторами большой емкости, иначе будет петь и плохо регулировать. Чтобы не свистел – подбирайте С1, свист часто идет от него. В общем область применения очень широкая, особенно перспективным будет её использование в качестве регулятора яркости мощных светодиодных ламп, LED лент и прожекторов, но про это в следующий раз. Статья написана при поддержке ear, ur5rnp, stalker68.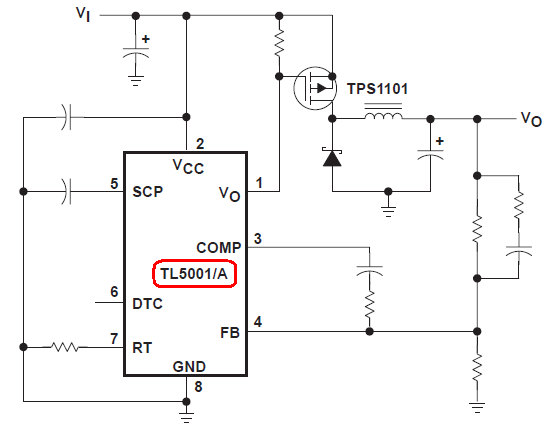

 При этом замыкание базы на общий провод необязательно.
При этом замыкание базы на общий провод необязательно.

 Их принято называть ведомыми. Выводы RT таких контроллеров следует объединить с ножками VREF, а CT – с общим кабелем.
Их принято называть ведомыми. Выводы RT таких контроллеров следует объединить с ножками VREF, а CT – с общим кабелем. Спроектировать блок питания можно и своими руками, изучив принцип его действия. Основная цель – формирование нужной величины напряжения питания, обеспечение её стабильности. Для большинства мощных устройств гальванической развязки, основанной на действии трансформатора, будет недостаточно, да и подобранный элемент явно удивит пользователей своими габаритами.
Спроектировать блок питания можно и своими руками, изучив принцип его действия. Основная цель – формирование нужной величины напряжения питания, обеспечение её стабильности. Для большинства мощных устройств гальванической развязки, основанной на действии трансформатора, будет недостаточно, да и подобранный элемент явно удивит пользователей своими габаритами.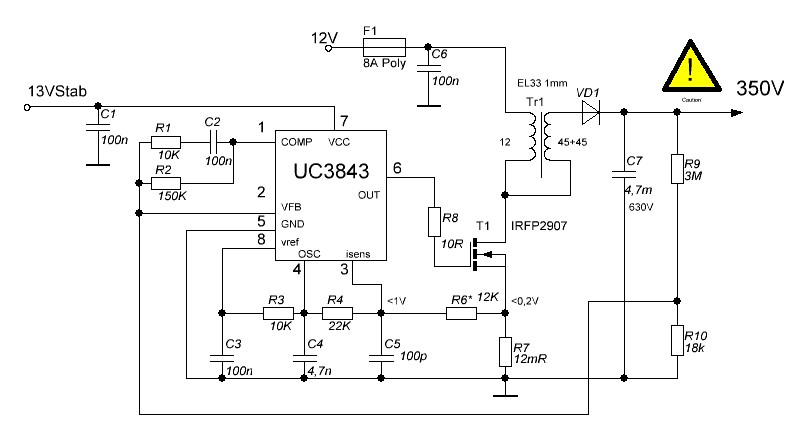 ШИМ-контроллеры для блоков питания дают возможность стабилизировать схему, а также воплотить множество дополнительных функций.
ШИМ-контроллеры для блоков питания дают возможность стабилизировать схему, а также воплотить множество дополнительных функций. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:Шим-контроллеры. Что такое шим контроллер, как он устроен и работает, виды и схемы
В схемотехнике современных импульсных источников питания (ИИП) приобрели широкую популярность ШИМ-регуляторы, выполненные в малогабаритных планарных корпусах с шестью выводами. Обозначение типа корпуса может быть SOT-23-6, SOT-23-6L, SOT-26, TSOP-6, SSOT-6. Внешний вид и расположение выводов показаны на рисунке ниже. В данном случае на левом фрагменте картинки представлена кодовая маркировка LD7530A
Обозначение типа корпуса может быть SOT-23-6, SOT-23-6L, SOT-26, TSOP-6, SSOT-6. Внешний вид и расположение выводов показаны на рисунке ниже. В данном случае на левом фрагменте картинки представлена кодовая маркировка LD7530A
Назначение выводов:
1 — GND. (Общий провод).
2 — FB. (FeedBack — Обратная Связь). Вход для управления длительностью импульсов сигналом с выходного напряжения. Иногда может иметь обозначение COMP (входной компаратор).
3 — RI/RT/CT/COMP/NC — В зависимости от типа микросхемы, может быть задействован для частотозадающей RC цепи (RI/RT/CT), либо для организации защиты, как вход компаратора отключения ШИМ при пороговом значение на его входе, указанном в документе. В некоторых типах микросхем этот вход может быть никак не задействован (NC — No Connect).
4 — SENSE, по другому CS (Current Sense) — Вход с датчика тока в истоке ключа.
5 — VCC — Вход напряжения питания и запуска микросхемы.
6 — OUT (GATE) — Выход для управления затвором (Gate) ключа.
Функционально подобные регуляторы работают по принципу популярных ранее микросхем ШИМ серии xx384x, которые хорошо зарекомендовали себя в плане надёжности и устойчивости.
Некоторые затруднения часто возникают при замене или выборе аналога для подобных ШИМ-регуляторов по причине применения кодовой маркировки в обозначении типа микросхем. Ситуация осложняется большим количеством производителей компонентов, которые не всегда предоставляют документацию в массовый доступ, так же не все производители готовых устройств снабжают схемами ремонтные сервисные центры, поэтому реальные схемные решения ремонтникам часто приходится изучать по установленным компонентам и монтажным соединениям непосредственно на плате.
В практике часто встречаются микросхемы ШИМ и кодом маркировки EAxxx и Eaxxx. Официальной документации на них не найдено в свободном доступе, но сохранились обсуждения на форумах и кусочки картинок из PDF от System General, которая публикует их как SG6848T и SG6848T2. Рисунок прилагается.
Рисунок прилагается.
Вниманию мастеров предлагаем таблицы, составленные из доступной в интернете информации и документов PDF для подбора аналогов при замене наиболее распространённых шестиногих планарных ШИМ c цоколёвкой выводов: pin1 — GND, pin2 — FB (COMP), pin4 — Sense, pin5 — Vcc, pin6 — OUT.
Основным их различием является применение и назначение вывода 3.
ШИМ-регуляторы (PWM), без использования вывода 3.
| Name | Part Namber | Diler | Marking |
|---|---|---|---|
| SG6849 | SG684965TZ | Fairchild / ON Semi | BBxx |
| SG6849 | SG6849-65T, SG6849-65TZ | System General | MBxx EBxx |
| SGP400 | SGP400TZ | System General | AAKxx |
ШИМ-регуляторы (PWM) с установкой резистора 95-100 kOhm на вывод 3.
Применяя перечисленные ниже ШИМ, частоту следует установить резистором RT (RI) от вывода 3 на землю. Обычно его номинал выбирается 95-100 kOhm для частоты 65-100 KHz. Более точно смотрите в прилагаемой документации. Файлы PDF упакованы в RAR.
Обычно его номинал выбирается 95-100 kOhm для частоты 65-100 KHz. Более точно смотрите в прилагаемой документации. Файлы PDF упакованы в RAR.
| Name | Part Namber | Diler | Marking |
|---|---|---|---|
| AP3103A | AP3103AKTR-G1 | Diodes Incorporated | GHL |
| AP8263 | AP8263E6R, A8263E6VR | AiT Semiconductor | S1xx |
| AT3263 | AT3263S6 | ATC Technology | 3263 |
| CR6848 | CR6848S | Chip-Rail | 848h26 |
| CR6850 | CR6850S | Chip-Rail | 850xx |
| CR6851 | CR6851S | Chip-Rail | 851xx |
| FAN6602R | FAN6602RM6X | Fairchild / ON Semi | ACCxx |
| FS6830 | FS6830 | FirstSemi | |
| GR8830 | GR8830CG | Grenergy | 30xx |
| GR8836 | GR8836C, GR8836CG | Grenergy | 36xx |
| H6849 | H6849NF | HI-SINCERITY | |
| H6850 | H6850NF | HI-SINCERITY | |
| HT2263 | HT2263MP | HOT-CHIP | 63xxx |
| KP201 | Kiwi Instruments | ||
| LD5530 | LD5530GL LD5530R | Leadtrand | xxt30 xxt30R |
| LD7531 | LD7531GL, LD7531PL | Leadtrend | xxP31 |
| LD7531A | LD7531AGL | Leadtrend | xxP31A |
| LD7535/A | LD7535BL, LD7535GL, LD7535ABL, LD7535AGL | Leadtrend | xxP35-xxx35A |
| LD7550 | LD7550BL, LD7550IL | Leadtrend | xxP50 |
| LD7550B | LD7550BBL, LD7550BIL | Leadtrend | xxP50B |
| LD7551 | LD7551BL/IL | Leadtrend | xxP51 |
| LD7551C | LD7551CGL | Leadtrend | xxP51C |
| NX1049 | XN1049TP | Xian-Innuovo | 49xxx |
| OB2262 | OB2262MP | On-Bright-Electronics | 62xx |
| OB2263 | OB2263MP | On-Bright-Electronics | 63xx |
| PT4201 | PT4201E23F | Powtech | 4201 |
| R7731 | R7731GE/PE | Richtek | 0Q= |
| R7731A | R7731AGE | Richtek | IDP=xx |
| SD4870 | SD4870TR | Silan Microelectronics | 4870 |
| SF1530 | SF1530LGT | SiFirst | 30xxx |
| SG5701 | SG5701TZ | System General | AAExx |
| SG6848 | SG6848T, SG6848T1, SG6848TZ1, SG6848T2 | Fairchild / ON Semi | AAHxx EAxxx |
| SG6858 | SG6858TZ | Fairchild / ON Semi | AAIxx |
| SG6859A | SG6859ATZ, SG6859ATY | Fairchild / ON Semi | AAJFxx |
| SG6859 | SG6859TZ | Fairchild / ON Semi | AAJMxx |
| SG6860 | SG6860TY | Fairchild | AAQxx |
| SP6850 | SP6850S26RG | Sporton Lab | 850xx |
| SP6853 | SP6853S26RGB, SP6853S26RG | Sporton Lab | 853xx |
| SW2263 | SW2263MP | SamWin | |
| UC3863/G | UC3863G-AG6-R | Unisonic Technologies Co | U863 U863G |
ШИМ-регуляторы, в которых вывод 3 используется иначе.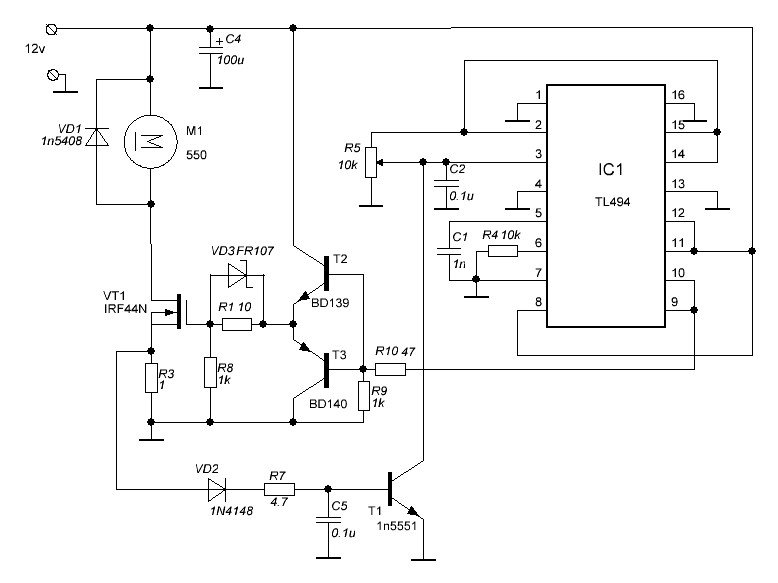
При использовании перечисленных ниже ШИМ (PWM-контроллеров) следует обратить внимание на вывод 3, который может использоваться для организации защиты — тепловой или от превышения входного напряжения.
Частота может быть фиксированной 65kHz, либо устанавливаться номиналом конденсатора на выводе 3.
При замене любых микросхем на аналоги внимательно изучайте документацию. Файлы PDF упакованы в архив RAR.
| Name | Part Namber | Diler | Marking |
|---|---|---|---|
| AP3105/V/L/R | AP3105KTR-G1, AP3105VKTR-G1, AP3105LKTR-G1, AP3105RKTR-G1 | Diodes Incorporated | GHN GHO GHP GHQ |
| AP3105NA/NV/NL/NR | AP3105NAKTR-G1, AP3105NVKTR-G1, AP3105NLKTR-G1, AP3105NRKTR-G1 | Diodes Incorporated | GKN GKO GKP GKQ |
| AP3125A/V/L/R | AP3125AKTR-G1, AP3125VKTR-G1, AP3125LKTR-G1, AP3125RKTR-G1 | Diodes Incorporated | GLS GLU GNB GNC |
| AP3125B | AP3125BKTR-G1 | Diodes Incorporated | GLV |
| AP3125HA/HB | AP3125HAKTR-G1, AP3125HBKTR-G1 | Diodes Incorporated | GNP GNQ |
Один из используемых подходов, позволяющих существенно сократить потери на нагревании силовых компонентов радиосхем, представляет собой использование переключательных режимов работы установок. При подобных системах электросиловой компонент или раскрыт — в это время на нем наблюдается фактически нулевое падение напряжения, или открыт — в это время на него подается нулевой ток. Рассеиваемую мощность можно вычислить, перемножив показатели силы тока и напряжения. В этом режиме получается достичь коэффициента полезного действия около 75-80% и более.
При подобных системах электросиловой компонент или раскрыт — в это время на нем наблюдается фактически нулевое падение напряжения, или открыт — в это время на него подается нулевой ток. Рассеиваемую мощность можно вычислить, перемножив показатели силы тока и напряжения. В этом режиме получается достичь коэффициента полезного действия около 75-80% и более.
Что такое ШИМ?
Для получения на выходе сигнала требуемой формы силовой ключ должен открываться всего лишь на определенное время, пропорциональное вычисленным показателям выходного напряжения. В этом и заключается принцип широтно-импульсной модуляции (ШИМ, PWM). Далее сигнал такой формы, состоящий из импульсов, разнящихся по своей ширине, поступает в область фильтра на основе дросселя и конденсатора. После преобразования на выходе будет практически идеальный сигнал требуемой формы.
Область применения ШИМ не ограничивается импульсными стабилизаторами и преобразователями напряжения. Использование данного принципа при проектировании мощного усилителя звуковой частоты дает возможность существенно снизить потребление устройством электроэнергии, приводит к миниатюризации схемы и оптимизирует систему теплоотдачи. К недостаткам можно причислить посредственное качество сигнала на выходе.
К недостаткам можно причислить посредственное качество сигнала на выходе.
Формирование ШИМ-сигналов
Создавать ШИМ-сигналы нужной формы достаточно трудно. Тем не менее индустрия сегодня может порадовать замечательными специальными микросхемами, известными как ШИМ-контроллеры. Они недорогие и целиком решают задачу формирования широтно-импульсного сигнала. Сориентироваться в устройстве подобных контроллеров и их использовании поможет ознакомление с их типичной конструкцией.
Стандартная схема контроллера ШИМ предполагает наличие следующих выходов:
- Общий вывод (GND). Он реализуется в виде ножки, которая подключается к общему проводу схемы питания устройства.
- Вывод питания (VC). Отвечает за электропитание схемы. Важно не спутать его с соседом с похожим названием — выводом VCC.
- Вывод контроля питания (VCC). Как правило, чип контроллера ШИМ принимает на себя руководство силовыми транзисторами (биполярными либо полевыми). В случае если напряжение на выходе снизится, транзисторы станут открываться лишь частично, а не целиком. Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.
 Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.
Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.Выходное управляющее напряжение (OUT)
Количество выводов микросхемы определяется её конструкцией и принципом работы. Не всегда удается сразу разобраться в сложных терминах, но попробуем выделить суть. Существуют микросхемы на 2-х выводах, управляющие двухтактными (двухплечевыми) каскадами (примеры: мост, полумост, 2-тактный обратный преобразователь). Существуют и аналоги ШИМ-контроллеров для управления однотактными (одноплечевыми) каскадами (примеры: прямой/обратный, повышающий/понижающий, инвертирующий).
Помимо этого, выходной каскад может быть по строению одно- и двухтактным. Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей «затвор — исток» и «затвор — сток». Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей «затвор — исток» и «затвор — сток». Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
ШИМ-контроллеры для источников питания большой мощности могут иметь также элементы управления выходным ключом (драйверы). В качестве выходных ключей рекомендуется использовать IGBT-транзисторы.
Основные проблемы ШИМ-преобразователей
При работе любого устройства полностью исключить вероятность поломки невозможно, и преобразователей это тоже касается. Сложность конструкции при этом не имеет значения, проблемы в эксплуатации может вызвать даже известный ШИМ-контроллер TL494. Неисправности имеют различную природу — некоторые из них можно выявить на глаз, а для обнаружения других требуется специальное измерительное оборудование.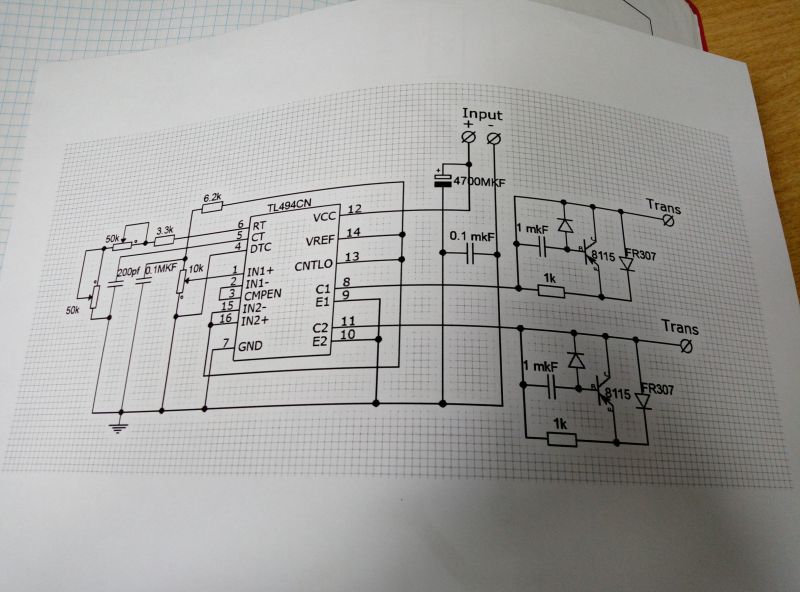
Чтобы ШИМ-контроллер, следует ознакомится со списком основных неисправностей приборов, а лишь позже — с вариантами их устранения.
Диагностика неисправностей
Одна из часто встречающихся проблем — пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра.
Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
- Контроллер глохнет после старта — обрыв петли ОС, перепад по току, проблемы с конденсатором на выходе фильтра (если таковой имеется), драйвером; возможно, разладилось управление ШИМ-контроллером. Надо осмотреть устройство на предмет сколов и деформаций, замерить показатели нагрузки и сравнить их с типовыми.
- ШИМ-контроллер не стартует — отсутствует одно из входных напряжений или устройство неисправно. Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
- Напряжение на выходе отличается от номинального — проблемы с петлей ООС или с контроллером.
- После старта ШИМ на БП уходит в защиту при отсутствии КЗ на ключах — некорректная работа ШИМ или драйверов.
- Нестабильная работа платы, наличие странных звуков — обрыв петли ООС или цепочки RC, деградация емкости фильтра.
В заключение
Универсальные и многофункциональные ШИМ-контроллеры сейчас можно встретить практически везде. Они служат не только в качестве неотъемлемой составляющей блоков питания большинства современных устройств — типовых компьютеров и других повседневных девайсов. На основе контроллеров разрабатываются новые технологии, позволяющие существенно сократить расход ресурсов во многих отраслях человеческой деятельности. Владельцам частных домов пригодятся контроллеры заряда аккумуляторов от фотоэлектрических батарей, основанные на принципе широтно-импульсной модуляции тока заряда.
Высокий коэффициент полезного действия делает разработку новых устройств, действие которых основывается на принципе ШИМ, весьма перспективной. Вторичные источники питания — вовсе не единственное направление деятельности.
Что вообще такое — инвертор.
Данный узел предназначен для преобразования постоянного тока в переменный. В данном случае мы имеем на входе 310 Вольт постоянного тока, которые надо подать на трансформатор. Но так как трансформаторы не хотят работать на постоянном токе, то и нужен инвертор.
Инвертор состоит из двух основных узлов.
ШИМ контроллера.
А также выходных высоковольтных транзисторов. Попутно весьма кстати попал в кадр трансформатор управления этими транзисторами.
Впрочем инвертор может выглядеть заметно проще, например у известного блока питания.
Микросхема, жменька деталей, вот и весь ШИМ контроллер.
В данном случае схемотехника блока питания, а также его мощность заметно отличаются от предыдущего варианта, потому транзистор всего один.
Еще один вариант, слева конденсаторы входного фильтра, справа трансформатор, между ними инвертор.
Так как на силовом транзисторе выделяется значительная мощность, то чаще всего он устанавливается на радиатор.
Но давайте немного отвлечемся на историю, с чего собственно все начиналось. Возможно конечно начиналось не с этого, потому точнее будет сказать, с чего начинал я.
Как вы понимаете, раньше не было ШИМ контроллеров, а иногда и обычную «кренку» купить была проблема, но прогресс не стоял на месте и радиолюбители пытались заменить большие трансформаторы на импульсные блоки питания.
На схеме показан типичный автогенератор, но были схемы и с простой логикой в качестве генератора импульсов.
Тогда схемы подобных блоков питания часто встречались в журнале Радио в контексте усилителей мощности. Но мое знакомство было на примере блока питания для Синклера. Кстати на фото один из них, который я оставил себе на память:)
Правда вышеприведенная схема требовала подбора транзисторов и в моем случае сильно перегревалась.
Схема с автогенератором считается самой простой, в данном примере она даже не имеет стабилизации выходного напряжения.
При всем современном разнообразии микросхем показанная выше схема также нашла себя в современном мире, в качестве «электронного трансформатора» для галогенных ламп.
Правда постепенно такие лампы заменяют на светодиоды, но все равно электронные трансформаторы довольно популярны, в основном из-за свой простоты и дешевизны.
Уже через довольно большое время подобные схемы получили второе дыхание. Известная фирма International Rectifier выпустила весьма простую микросхему для электронного балласта люминесцентных ламп. Но выяснилось, что данная микросхема отлично работает в качестве задающей для импульсного БП. К ним относятся микросхемы IR2151, IR2153 и подобные.
Вообще некоторые радиолюбители делали и стабилизированные блоки питания на базе этой микросхемы, но работает это не всегда корректно.
По сути для этой микросхемы надо только несколько мелких деталей и пара полевиков, вот и вся схема инвертора. Именно с применением этой микросхемы я делал первичный блок питания для своего лабораторного.
Кстати, именно эту микросхему я рекомендую для питания усилителей мощности, как неприхотливую и довольно надежную. А также хочу сказать, что нерегулируемые БП лучше себя ведут в плане шумов.
Так выглядит трехканальный блок питания с мощностью в 300 Ватт и ШИМ регулировкой вентилятора. Более полная информация есть в обзоре лабораторника.
Также довольно часто можно встретить и однотактные блоки питания на основе автогенератора. Особенно часто они попадались в АТХ боках в качестве дежурки.
Также они могут попасться и в очень бюджетных зарядных для телефонов. Автогенератор является самым простым типом инвертора.
Хотя бывают и исключения, например блок питания довольно дорогого фирменного кондиционера также имел в своем составе автогенератор, правда сделан довольно качественно и имеет стабилизацию напряжения.
В следующий раз мне попались импульсные блоки питания в новых тогда телевизорах. После больших и тяжелых трансформаторов это был прогресс.
Схемотехника правда была жуткая, ремонтопригодность слабая, да и габарит я не назвал маленьким. На фото блок питания мощностью 80 Ватт.
Сначала они также делались по схеме с автогенератором, но потом начали ставить микросхему, правда особо ничего это не изменило.
Вот и подошли мы к теме более современных инверторов, так как на этом этапе блоки питания вышли на тот схемотехнический уровень, который мы сейчас наблюдаем в современных блоках.
Да, поднимали частоту, расширяли диапазон работы, мощность, но суть осталась той же что и была 30 лет назад. Правда так как тогда интегральные ШИМ контроллеры были слабо развиты, то делали их в виде сборок.
Впрочем и в современных блоках питания не стесняются применять такие вот унифицированные модули, по своему это даже удобно.
Типовая блок схема распространенных моделей инверторов состоит из пяти узлов.
1. Узел контроля напряжения питания, защита от работы при пониженном и повышенном напряжении.
2. Вспомогательное питания или цепь запуска.
3. Силовой элемент и датчик тока. Этот узел может заметно отличаться в зависимости от топологии блока питания.
4. Собственно ШИМ контроллер, мозги блока питания.
5. Узел основного питания ШИМ контроллера.
Рассмотрим как происходит запуск большинства блоков питания, эта информация может помочь в поиске неисправностей.
После того как подали высокое напряжение, оно через резистор попадает в цепь питания ШИМ контроллера.
Как только напряжение достигнет порога включения ШИМ контроллер запускается, питаясь в это время от конденсатора в цепи питания.
Если ваш блок питания не подает признаков жизни, проверьте, есть ли питание на входе ШИМ контроллера, иногда эти резисторы уходят в обрыв.
Затем ШИМ контроллер проверяет, в порядке ли питающее напряжение. Эта цепь есть далеко не у всех инверторов, потому если ее нет, то можно сразу перейти к следующему шагу.
Если с питанием все отлично, то контроллер начинает выдавать управляющие импульсы силовому транзистору. попутно при этом контролируется ток в цепи этого транзистора и если он превышен, то ШИМ контроллер переходит в режим защиты.
Если все нормально, то буквально после нескольких тактов на выходе цепи основного питания появляется рабочее напряжение, которое и питает контроллер. Кстати это один из узлов отказа, если питания нет, то блок питания будет работать в старт-стоп режиме.
Если все этапы запуска прошли корректно, то дальше вступает в дело ШИМ стабилизация. В данном случае я всегда сравниваю ее с бочкой, в которую мы порциями подаем воду и сливая ее через другой кран с разным напором. Задача контроллера поддерживать всегда один и тот же уровень воды в бочке при том, что вводной кран может быть только в двух состояниях, открыто и закрыто.
Кстати, многие видели на выходе блоков питания резистор, подключенный параллельно питанию, он нужен чтобы обеспечить некую минимальную нагрузку, так как блоку питания тяжело работать при очень малой ширине импульса.
Для примера ширина импульсов при небольшой нагрузке.
Если увеличить нагрузку, то ШИМ контроллер увеличит подачу энергии в трансформатор, а через него в нагрузку.
Даже если к примеру нагрузить блок питания на полную, то ширина импульсов не будет полной.
Запас необходим для компенсации снижения входного напряжения.
Если снизить входное напряжение еще больше, то ШИМ контроллер просто выставит максимальную ширину импульса. Кстати, ШИМ контроллеры блоков питания не формируют 100% заполнение, так как всегда необходимо «мертвое» время для защиты выходных транзисторов. В это время выходные транзисторы закрыты.
Для обратноходовых однотактных блоков питания, а именно они используются в качестве блоков питания небольшой мощности, максимальное заполнение составляет 50%.
Самым первым ШИМ контроллером, с которым я познакомился, была легендарная TL494. Микросхема очень старая, но так получилось, что у разработчика дешевый и очень универсальный контроллер и даже спустя много лет и при наличии современных решений он еще весьма широко применяется в блоках питания.
Выпускается она многими фирмами и иногда под разными названиями, например аналог от Самсунга называется КА7500.
На первый взгляд его внутреннее устройство может показаться довольно сложным, но на самом деле таковым не является.
Если немного упростить картинку, то будет примерно так:
1 и 2, стабилизатор питания и источник опорного напряжения.
3. Генератор импульсов, задает частоту работы контроллера.
4. Два компаратора, один обычно используется для стабилизации тока, второй — напряжения.
5. Задатчик мертвого времени, т.е. минимальной паузы между открытым состоянием выходов.
6. Узел сложения всех сигналов.
7. Триггер, который управляет выходными ключами и задает логику работы, двухтактный или однотактный режим. В некоторых аналогах этот триггер сбоил на частотах ниже 100 Гц, чем доставлял немало сюрпризов строителям повышающих инверторов в 220 Вольт.
Микросхема выполнена в корпусе с 16 выводами. Сама по себе надежна, но иногда в блоках питания АТХ, где ее питание идет от источника дежурного напряжения, выходит из строя после его ухода в разнос, когда высыхал конденсатор по выходу 5 Вольт. Пробивало стабилизатор опорного напряжения и на выходе БП запросто могло появиться высокое напряжение. Потому при проверке прежде всего смотреть наличие 5 Вольт на выводе 14.
В блоках питания АТ, а потом в распространенных китайских БП в кожухе она питается от своего же силового трансформатора. Запуск происходит за счет резисторов в базовых цепях силовых ключей. При включении они сначала входят в автогенераторный режим, на выходе трансформатора появляется небольшое напряжение, микросхема начинает работать и перехватывает управление на себя. Потому если БП не запускается, то в первую очередь проверяем резисторы выделенные на схеме резисторы.
Вторым, не менее легендарным ШИМ контроллером является семейство однотактных UC384х.
Думаю что вы могли из встречать раньше в блоках питания и преобразователях напряжения.
Внутреннее устройство весьма похоже на TL494, но немного отличается. Для начала у микросхемы только один выход, а не два.
Кроме того компараторы привязаны к определенному напряжению, заданному внутри микросхемы, а не универсальные.
Ну и конечно ключевая особенность, микротоковый старт. пока микросхема не начнет работать, он потребляет очень маленький ток, потому запустить ее можно прямо от входного напряжения через резистор, TL494 так не умеет.
Чтобы запуск проходил корректно, у микросхемы есть пороговая схема определяющая напряжение включения и выключения микросхемы. Существует два варианта, около 9 и 15 Вольт.
Кроме того микросхема может иметь 50 и 100% рабочий цикл, первая идет в блоки питания, вторая в преобразователи напряжения.
Так получается четыре варианта исполнения этого контроллера.
Микросхема выпускается в разных корпусах, но наиболее распространен корпус с восемью выводами.
Типовая схема блока питания с этой микросхемой выглядит примерно так.
Сейчас на рынке есть много блоков питания с другими микросхемами, но если посмотреть на их схему, то вы увидите очень много общего, все те же узлы и элементы. Отличия если и есть, то они минимальны.
Инверторы блоков питания могут иметь разную топологию, и об этом я обязательно расскажу отдельно, но большинство выполнено по схемотехнике флайбек или полумост, две верхние схемы на чертеже. Собственно все описанные сегодня блоки питания работают именно так.
Но вернемся к ШИМ контроллерам. Перед этим я описывал варианты, когда ШИМ контроллер отдельно, а силовой узел отдельно. но также получили распространение и полностью интегрированные контроллеры, например серии TOP от Power integrations где практически все собрано в одном корпусе.
Не так давно мне даже попалась подделка, причем что интересно, она слева, с лазерной маркировкой, справа оригинал.
Распространение они получили благодаря простейшей схемотехнике, где в простом варианте блок питания состоит буквально из нескольких деталей.
Потом появились более продвинутые контроллеры, где можно задавать напряжение включения и отключения, а также ограничение выходной мощности. Но при желании их можно перевести в трехвыводный режим, соединив выводы как было на фото раньше.
Но в любом случае данные контроллеры гораздо умнее и имеют комплекс защит от разных проблем, например они выдерживали напряжение более 300 Вольт по входу просто блокируя свою работу.
Но секрет их популярности был также и в удобной программе расчета, которую предоставлял производитель. Она позволяла рассчитать все, вплоть до укладки обмоток трансформатора. А при обнаружении проблем в расчетах, выдавала подсказки.
Производитель предоставлял варианты применения своих микросхем в виде примеров. Был даже вариант компьютерного блока питания, но как-то не пошло.
Зато в небольших блоках питания, например мониторов, он встречаются весьма часто.
Кроме того я и сам их очень активно использую уже наверное лет 15.
Китайские производители также не отстают, выпуская свои варианты подобных микросхем.
Которые довольно успешно применяют в небольших блоках питания
Кстати, при желании можно использовать ШИМ контроллеры и без обратной связи от выходного напряжения, используя обмотку питания самого контроллера. Схема упрощается, но стабильность конечно будет немного ниже чем при правильной обратной связи.
В общих чертах на этом все. Вообще мне иногда кажется, что чем больше я рассказываю, тем больше остается за кадром, что еще хотелось бы рассказать более подробно, но не успеваешь. Потому скорее всего будут еще выпуски по отдельным узлам и принципам работы.
Видео получилось слишком длинным, даже сам не ожидал, и это при том, что еще почти ничего не сказал за ключевые транзисторы и часть даже вырезал, наверное болтаю слишком много:(
Несколько ссылок, на полезные обзоры, которые упоминались в видео.
За последнее десятилетие мы видим ускоренный темп развития электронных устройств. Вместе с ним растут и требования к устройству питания. Линейные регуляторы напряжения имеют низкий КПД и не всегда могут обеспечить требования, предъявляемые к устройству. Схемы с синхронным выпрямителем сегодня получили большое распространение. Номенклатура ИС, выпускаемых различными производителями, очень велика. В данной статье пойдет речь об особенностях использования синхронного ключа в синхронном выпрямителе и будет рассмотренно несколько видов ШИМ-контроллеров компании International Rectifier.
Схема синхронного выпрямителя была разработана очень давно. Для ее построения используются обычные n-канальные полевые транзисторы, только работают они в источниках питания с низким выходным напряжением и заменяют собой выпрямительные диоды. Напряжение сток-исток таких транзисторов обычно невелико, но емкости между сток-исток и затвор-сток весьма и весьма значительны. Характерной особенностью работы полевых транзисторов в качестве синхронных выпрямителей является их работа в четвертом квадранте их вольтамперной характеристики, то есть ток через них протекает в обратном направлении — от истока к стоку. На рис. 1 представлена схема построения синхронного выпрямителя.
Рисунок 1 Схема построения синхронного выпрямителя
Рисунок 2 Блок-схема видов приборов для построения синхронных регуляторов, производимых компанией International Rectifier
Требования к выбору элементов схемы при построении синхронного выпрямителя таковы:
Подводя итог по выбору элементов заметим, что при выборе транзисторов компания рекомендует разработчикам выбирать синхронные ключи с минимальным значением сопротивления. Для коммутирующего ключа необходимо выбирать транзистор с минимальным значением заряда затвора.
Компания International Rectifier представляет широкий ряд ИС ШИМ-конт-роллеров с различными функциональными возможностями (см. рис. 2). Семейство импульсных синхронных регуляторов включает интегрированные сборки в монолитных корпусах (SupIRBuck, IPower) и ШИМ-контроллеры без внутренних ключей. Двухканальные сборки представлены, в первом случае, монолитными интегрированными схемами и ШИМ-контроллерами с внутренним линейным опорным преобразователем или без него. Многофазовые системы представлены ИС семейства Х-Fase и I-Power.
Интегральная схема синхронного ШИМ-контроллера IR3651SPBF разработана для высокоэффективных синхронных понижающих DC/DC конверторов с входными напряжениями до 150 В. Программируемые рабочие частоты в диапазоне до 400 кГц позволяют применять микросхему в источниках питания телекоммуникационного оборудования и базовых станций, сетевых серверов, в автомобильных и промышленных блоках управления. При использовании микросхемы в маломощных устройствах уровень выходного напряжения может быть точно отрегулирован благодаря встроенному источнику опорного напряжения (1.25 В). ИС ШИМ-контроллера IR3651S совместно с парой DirectFET транзисторов обеспечивает эффективность преобразования более 88% при напряжении питания 48 В и выходном напряжении 3.3 В на токе 6 А без применения радиаторов или обдува. Другое преимущество данной ИС перед аналогами, представленными на рынке на сегодняшний день, заключается в повышенном максимальном напряжении питания. ИС разработана по 160-вольтовой HVIC технологии. Это позволяет повысить параметры надежности разработки в целом. ИС ШИМ-контроллера IR3651S разработана для управления двумя внешними N-каналь-ными МОП-транзисторами при их токах управления до 25 А и имеет несколько опций защиты: программируемый плавный запуск, защита по току и блокировка низкого напряжения. ИС имеет также функцию синхронизации для ее согласованной работы на общую фазу. Таким образом, эта микросхема может быть использована как для маломощных (менее 60 Вт) неизолированных DC/DC конверторов сетевого оборудования, так и для мощных (более 200 Вт) каскадов предварительного регулирования в управляемых изолированных конверторах. На рис. 3 представлена схема включения ИС IR3651S.
Рисунок 3 Схема включения контроллера IR3651S
Схема 3-фазного ШИМ-контроле-ра для синхронного DC-DC преобразователя IR3094MPbF совместно с использованием транзисторов MOSFET в корпусе DirectFET позволяет сократить на 40 % размеры платы при сравнении с сегодняшними аналогами. Малые размеры контроллера IR3094 идеально подходят для построения компактных синхронных преобразователей для систем с высокой плотностью монтажа. Обычно решения синхронных преобразователей с тремя выходными напряжениями требуют 14 элементов: 3 контроллера, 6 ключей, 3 дросселя, компоненты, обеспечивающие внешнее включение, плюс компоненты обратной связи. Преобразователи, собранные с применением контролера IR3094 и транзисторов MOSFET в корпусе DirectFET, IRF6637 и IRF6678 уменьшают количество элементов преобразователя до 7 единиц.
Три пары транзисторов в корпусе DirectFET могут быть размещены в непосредственной близости с IR3094, создавая решение, которое минимизирует размер печат ной платы и корпуса. Встроенные мощные драйверы контроллера IR3094, объединенные с парой DirectFET транзисторов, в каждой фазе создают решение для управления мощностью с высокой плотностью тока для конверторов типа POL (точка-нагрузка). Контроллер IR3094M разработан для приложений, требующих напряжения питания от 0.85 до 5.1 В. Он размещен в компактном MLPQ корпусе 7 мм? 7 мм и содержит встроенный 3 А драйвер управления ключами, 1 % источник опорного напряжения, установку выходного напряжения по каждой фазе, программируемую частоту переключения до 540 кГц.
Контроллер обеспечивает следующие виды защиты:
- программируемый мягкий старт;
- защита от КЗ в виде икающего тока на выходе каждой фазы;
- защита от перенапряжения;
- выход, сигнализирующий о текущем состоянии контроллера — «power good».
Совместно с данным типом контроллера рекомендуется использовать транзистор IRF6678, который является идеальным синхронным MOSFETом, который показывает низкое значение сопротивления — 1.7 мОм –10 В. Транзистор IRF6637 обладает низким значением заряда затвора (4 нКл) и менее подвержен эффекту Миллера, сопротивление перехода составляет 5.7 мОм при 10 В.
Для получения точного выходного напряжения с отклонением 1 % компания International Rectifier выпускает ИС IR3637. Ее применяют там, где необходимо высоко качество питающего напряжения. Данная ИС позволяет пользователю работать в диапазоне входного напряжения от 4.5 до 16 В. Основное преимущество данного ШИМ-контроллера — упрощенная конструкция и повышение компактности DC-DC преобразователя. ИС расположена в компактном корпусе SO-8 и обладает такими защитами как защита от короткого замыкания, блокировка по низкому напряжению питания, функция мягкого старта с внешним программированием.
Контроллер обеспечивает скважность ШИМ-сигнала до 85 % на частоте 400 кГц, что позволяет снизить размеры дросселя и улучшить динамические характеристики преобразователя. На рис. 4 представлена схема включения ИС ШИМ-контроллера IR3637.
Ранее в приложениях с 12 В входным напряжением разработчики имели недостаточный выбор возможностей и ориентировались в основном на использование интегрированных неизолированных DC-DC преобразователей, занимающих существенно большую площадь. Применение альтернативного решения на дискретных компонентах(новых ШИМ-контроллерах и МОП-транзисторах) позволяет использовать преимущества интеграции схемы конвертора в плату.
При разработке схемы синхронного выпрямления разработчику рекомендуется обратить внимание на три основных момента в разводке цепи земли ШИМ контроллера:
Номенклатура ШИМ-контроллеров и интегрированных сборок на их основе у компании International Rectifier насчитывает более 100 наименований. В табл. 1 приведены основные параметры некоторых ШИМ-контроллеров. Для ускорения разработки синхронного преобразователя напряжения компания International Rectifier представляет на сайте on-line проект для разработчиков My-Power — /engine/api/go.php?go=https://www.irf. com/design-center/mypower/index.html. Здесь разработчик может не только рассчитать параметры схемы и увидеть осциллограммы работы устройства, но также получить рекомендации по типу транзисторов и посмотреть их основные параметры.
·о ·р
Широтно-импульсная модуляция (ШИМ, англ. Pulse-width modulation (PWM) ) — приближение желаемого сигнала (многоуровневого или непрерывного) к действительным бинарным сигналам (с двумя уровнями — вкл /выкл ), так, что, в среднем, за некоторый отрезок времени, их значения равны. Формально, это можно записать так:
,где x (t ) — желаемый входной сигнал в пределе от t1 до t2 , а ∆T i — продолжительность i -го ШИМ импульса, каждого с амплитудой A . ∆T i подбирается таким образом, что суммарные площади (энергии) обеих величин приблизительно равны за достаточно продолжительный промежуток времени, равны так же и средние значения величин за период:
.Управляемыми «уровнями», как правило, являются параметры питания силовой установки, например, напряжение импульсных преобразователей /регуляторов постоянного напряжения/или скорость электродвигателя. Для импульсных источников x (t ) = U const стабилизации.
ШИП — широтно-импульсный преобразователь, генерирующий ШИМ-сигнал по заданному значению управляющего напряжения. Основное достоинство ШИМ — высокий КПД его усилителей мощности, который достигается за счёт использования их исключительно в ключевом режиме. Это значительно уменьшает выделение мощности на силовом преобразователе (СП).
Применение
При широтно-импульсной модуляции в качестве несущего колебания используется периодическая последовательность прямоугольных импульсов, а информационным параметром, связанным с дискретным модулирующим сигналом, является длительность этих импульсов. Периодическая последовательность прямоугольных импульсов одинаковой длительности имеет постоянную составляющую, обратно пропорциональную скважности импульсов, то есть прямо пропорциональную их длительности. Пропустив импульсы через ФНЧ с частотой среза , значительно меньшей, чем частота следования импульсов, эту постоянную составляющую можно легко выделить, получив постоянное напряжение. Если длительность импульсов будет различной, ФНЧ выделит медленно меняющееся напряжение, отслеживающее закон изменения длительности импульсов. Таким образом, с помощью ШИМ можно создать несложный ЦАП : значения отсчётов сигнала кодируются длительностью импульсов, а ФНЧ преобразует импульсную последовательность в плавно меняющийся сигнал.
Wikimedia Foundation . 2010 .
Структурная схема включения ШИМ — контроллера TL494CN — Зарубежные микросхемы — Микросхемы — Справочник Радиокомпонентов — РадиоДом
Сейчас большинство автомобильных и сетевых преобразователей напряжения собраны на специализированном контроллере TL494CN и хорошо себя зарекомендовала среди многочисленных радиолюбителей.
Микросхема TL494CN в основном производится в пластиковом корпусе типоразмера DIP16 (бывают и в других корпусах, но используются редко). Структурная схема приведена на рисунке ниже:
Схема включается при достижении питанием порога 5,5 — 7,0 вольт (типовое значение 6.4 вольт). До этого момента внутренние шины контроля запрещают работу генератора и логической части схемы. Ток холостого хода при напряжении питания +15 вольт (выходные транзисторы отключены) не более 10 мА. ИОН +5 вольт (+4.75…+5.25 вольт, стабилизация по выходу не хуже +/- 25 мВ) обеспечивает вытекающий ток до 10 мА.
Генератор вырабатывает на время задающем конденсаторе Сt (вывод 5) пилообразное напряжение 0…+3.0 вольт (амплитуда задана ИОНом) для TL494 Texas Instruments и 0…+2.8 вольт для TL494 Motorola, соответственно для TI F=1.0/(RtCt), и F=1.1/(RtCt).
Допустимы рабочие частоты от 1 до 300 кГц, при этом рекомендованный диапазон Rt = 1…0,5 мОм, Ct=470 пФ…10 мкФ. При этом типовой температурный дрейф частоты составляет (естественно без учета дрейфа навесных компонентов) +/-3 %, а уход частоты в зависимости от напряжения питания — в пределах 0.1 % во всем допустимом диапазоне.
Для дистанционного выключения генератора можно внешним ключом замкнуть вход Rt (6) на выход ИОНа, или — замкнуть Ct на землю. Разумеется, сопротивление утечки разомкнутого ключа должно учитываться при выборе Rt, Ct.
Вход контроля фазы покоя (скважности) через компаратор фазы покоя задает необходимую минимальную паузу между импульсами в плечах схемы. Это необходимо как для недопущения сквозного тока в силовых каскадах за пределами ИС, так и для стабильной работы триггера — время переключения цифровой части TL494CN составляет 200 нс. Выходной сигнал разрешен тогда, когда пила на Cт превышает напряжение на управляющем входе 4 (DT). На тактовых частотах до 150 кГц при нулевом управляющем напряжении фаза покоя = 3 % периода (эквивалентное смещение управляющего сигнала 100…120 мВ), на больших частотах встроенная коррекция расширяет фазу покоя до 200..300 нс.
Используя цепь входа DT, можно задавать фиксированную фазу покоя (R-R делитель), режим мягкого старта (R-C), дистанционное выключение (ключ), а также использовать DT как линейный управляющий вход. Входная цепь собрана на pnp-транзисторах, поэтому входной ток (до 1.0 мкА) вытекает из ИС, а не втекает в нее. Ток достаточно большой, поэтому следует избегать высокоомных резисторов (не более 100 кОм).
Усилители ошибки — фактически, операционные усилители с Ку=70..95 дБ по постоянному напряжению (60 дБ для ранних серий), Ку=1 на 350 кГц. Входные цепи собраны на pnp-транзисторах, поэтому входной ток (до 1.0 мкА) вытекает из ИС а не втекает в нее. Ток достаточно большой для ОУ, напряжение смещения тоже (до 10 мВ) поэтому следует избегать высокоомных резисторов в управляющих цепях (не более 100 кОм). Зато благодаря использованию pnp-входов диапазон входных напряжений — от -0.3 вольт до Vпитания-2 вольт
Усилители не предназначены для работы в пределах одного такта рабочей частоты. При задержке распространения сигнала внутри усилителя в 400 нс они для этого слишком медленные, да и логика управления триггером не позволяет (возникали бы побочные импульсы на выходе). В реальных схемах ПН частота среза цепи ОС выбирается порядка 100-15000 Герц.
Триггер и логика управления выходами — При напряжении питания не менее 7 вольт, если напряжение пилы на генераторе больше чем на управляющем входе DT, и если напряжение пилы больше чем на любом из усилителей ошибки (с учетом встроенных порогов и смещений) — разрешается выход схемы. При сбросе генератора из максимума в ноль — выходы отключаются. Триггер с пара фазным выходом делит частоту надвое. При логическом 0 на входе 13 (режим выхода) фазы триггера объединяются по ИЛИ и подаются одновременно на оба выхода, при логической 1 — подаются пара фазно на каждый выход порознь.
Выходные транзисторы — npn Дарлингтон со встроенной тепловой защитой (но без защиты по току). Таким образом, минимальное падение напряжение между коллектором (как правило замкнутым на плюсовую шину) и эмиттером (на нагрузке) — 1.5 вольт (типовое при 200 мА), а в схеме с общим эмиттером — чуть лучше, 1.1 В типовое. Предельный выходной ток (при одном открытом транзисторе) ограничен 0,5 ампер, предельная мощность на весь кристалл — 1 Ватт.
Обзор схем современных блоков питания. Микросхемы ШИМ-контроллеров ON Semi для сетевых источников питания
За последнее десятилетие мы видим ускоренный темп развития электронных устройств. Вместе с ним растут и требования к устройству питания. Линейные регуляторы напряжения имеют низкий КПД и не всегда могут обеспечить требования, предъявляемые к устройству. Схемы с синхронным выпрямителем сегодня получили большое распространение. Номенклатура ИС, выпускаемых различными производителями, очень велика. В данной статье пойдет речь об особенностях использования синхронного ключа в синхронном выпрямителе и будет рассмотренно несколько видов ШИМ-контроллеров компании International Rectifier.
Схема синхронного выпрямителя была разработана очень давно. Для ее построения используются обычные n-канальные полевые транзисторы, только работают они в источниках питания с низким выходным напряжением и заменяют собой выпрямительные диоды. Напряжение сток-исток таких транзисторов обычно невелико, но емкости между сток-исток и затвор-сток весьма и весьма значительны. Характерной особенностью работы полевых транзисторов в качестве синхронных выпрямителей является их работа в четвертом квадранте их вольтамперной характеристики, то есть ток через них протекает в обратном направлении — от истока к стоку. На рис. 1 представлена схема построения синхронного выпрямителя.
Рисунок 1 Схема построения синхронного выпрямителя
Рисунок 2 Блок-схема видов приборов для построения синхронных регуляторов, производимых компанией International Rectifier
Требования к выбору элементов схемы при построении синхронного выпрямителя таковы:
Подводя итог по выбору элементов заметим, что при выборе транзисторов компания рекомендует разработчикам выбирать синхронные ключи с минимальным значением сопротивления. Для коммутирующего ключа необходимо выбирать транзистор с минимальным значением заряда затвора.
Компания International Rectifier представляет широкий ряд ИС ШИМ-конт-роллеров с различными функциональными возможностями (см. рис. 2). Семейство импульсных синхронных регуляторов включает интегрированные сборки в монолитных корпусах (SupIRBuck, IPower) и ШИМ-контроллеры без внутренних ключей. Двухканальные сборки представлены, в первом случае, монолитными интегрированными схемами и ШИМ-контроллерами с внутренним линейным опорным преобразователем или без него. Многофазовые системы представлены ИС семейства Х-Fase и I-Power.
Интегральная схема синхронного ШИМ-контроллера IR3651SPBF разработана для высокоэффективных синхронных понижающих DC/DC конверторов с входными напряжениями до 150 В. Программируемые рабочие частоты в диапазоне до 400 кГц позволяют применять микросхему в источниках питания телекоммуникационного оборудования и базовых станций, сетевых серверов, в автомобильных и промышленных блоках управления. При использовании микросхемы в маломощных устройствах уровень выходного напряжения может быть точно отрегулирован благодаря встроенному источнику опорного напряжения (1.25 В). ИС ШИМ-контроллера IR3651S совместно с парой DirectFET транзисторов обеспечивает эффективность преобразования более 88% при напряжении питания 48 В и выходном напряжении 3.3 В на токе 6 А без применения радиаторов или обдува. Другое преимущество данной ИС перед аналогами, представленными на рынке на сегодняшний день, заключается в повышенном максимальном напряжении питания. ИС разработана по 160-вольтовой HVIC технологии. Это позволяет повысить параметры надежности разработки в целом. ИС ШИМ-контроллера IR3651S разработана для управления двумя внешними N-каналь-ными МОП-транзисторами при их токах управления до 25 А и имеет несколько опций защиты: программируемый плавный запуск, защита по току и блокировка низкого напряжения. ИС имеет также функцию синхронизации для ее согласованной работы на общую фазу. Таким образом, эта микросхема может быть использована как для маломощных (менее 60 Вт) неизолированных DC/DC конверторов сетевого оборудования, так и для мощных (более 200 Вт) каскадов предварительного регулирования в управляемых изолированных конверторах. На рис. 3 представлена схема включения ИС IR3651S.
Рисунок 3 Схема включения контроллера IR3651S
Схема 3-фазного ШИМ-контроле-ра для синхронного DC-DC преобразователя IR3094MPbF совместно с использованием транзисторов MOSFET в корпусе DirectFET позволяет сократить на 40 % размеры платы при сравнении с сегодняшними аналогами. Малые размеры контроллера IR3094 идеально подходят для построения компактных синхронных преобразователей для систем с высокой плотностью монтажа. Обычно решения синхронных преобразователей с тремя выходными напряжениями требуют 14 элементов: 3 контроллера, 6 ключей, 3 дросселя, компоненты, обеспечивающие внешнее включение, плюс компоненты обратной связи. Преобразователи, собранные с применением контролера IR3094 и транзисторов MOSFET в корпусе DirectFET, IRF6637 и IRF6678 уменьшают количество элементов преобразователя до 7 единиц.
Три пары транзисторов в корпусе DirectFET могут быть размещены в непосредственной близости с IR3094, создавая решение, которое минимизирует размер печат ной платы и корпуса. Встроенные мощные драйверы контроллера IR3094, объединенные с парой DirectFET транзисторов, в каждой фазе создают решение для управления мощностью с высокой плотностью тока для конверторов типа POL (точка-нагрузка). Контроллер IR3094M разработан для приложений, требующих напряжения питания от 0.85 до 5.1 В. Он размещен в компактном MLPQ корпусе 7 мм? 7 мм и содержит встроенный 3 А драйвер управления ключами, 1 % источник опорного напряжения, установку выходного напряжения по каждой фазе, программируемую частоту переключения до 540 кГц.
Контроллер обеспечивает следующие виды защиты:
- программируемый мягкий старт;
- защита от КЗ в виде икающего тока на выходе каждой фазы;
- защита от перенапряжения;
- выход, сигнализирующий о текущем состоянии контроллера — «power good».
Совместно с данным типом контроллера рекомендуется использовать транзистор IRF6678, который является идеальным синхронным MOSFETом, который показывает низкое значение сопротивления — 1.7 мОм –10 В. Транзистор IRF6637 обладает низким значением заряда затвора (4 нКл) и менее подвержен эффекту Миллера, сопротивление перехода составляет 5.7 мОм при 10 В.
Для получения точного выходного напряжения с отклонением 1 % компания International Rectifier выпускает ИС IR3637. Ее применяют там, где необходимо высоко качество питающего напряжения. Данная ИС позволяет пользователю работать в диапазоне входного напряжения от 4.5 до 16 В. Основное преимущество данного ШИМ-контроллера — упрощенная конструкция и повышение компактности DC-DC преобразователя. ИС расположена в компактном корпусе SO-8 и обладает такими защитами как защита от короткого замыкания, блокировка по низкому напряжению питания, функция мягкого старта с внешним программированием.
Контроллер обеспечивает скважность ШИМ-сигнала до 85 % на частоте 400 кГц, что позволяет снизить размеры дросселя и улучшить динамические характеристики преобразователя. На рис. 4 представлена схема включения ИС ШИМ-контроллера IR3637.
Ранее в приложениях с 12 В входным напряжением разработчики имели недостаточный выбор возможностей и ориентировались в основном на использование интегрированных неизолированных DC-DC преобразователей, занимающих существенно большую площадь. Применение альтернативного решения на дискретных компонентах(новых ШИМ-контроллерах и МОП-транзисторах) позволяет использовать преимущества интеграции схемы конвертора в плату.
При разработке схемы синхронного выпрямления разработчику рекомендуется обратить внимание на три основных момента в разводке цепи земли ШИМ контроллера:
Номенклатура ШИМ-контроллеров и интегрированных сборок на их основе у компании International Rectifier насчитывает более 100 наименований. В табл. 1 приведены основные параметры некоторых ШИМ-контроллеров. Для ускорения разработки синхронного преобразователя напряжения компания International Rectifier представляет на сайте on-line проект для разработчиков My-Power — /engine/api/go.php?go=https://www.irf. com/design-center/mypower/index.html. Здесь разработчик может не только рассчитать параметры схемы и увидеть осциллограммы работы устройства, но также получить рекомендации по типу транзисторов и посмотреть их основные параметры.
Широтно-импульсная модуляция (ШИМ) – это метод преобразования сигнала, при котором изменяется длительность импульса (скважность), а частота остаётся константой. В английской терминологии обозначается как PWM (pulse-width modulation). В данной статье подробно разберемся, что такое ШИМ, где она применяется и как работает.
Область применения
С развитием микроконтроллерной техники перед ШИМ открылись новые возможности. Этот принцип стал основой для электронных устройств, требующих, как регулировки выходных параметров, так и поддержания их на заданном уровне. Метод широтно-импульсной модуляции применяется для изменения яркости света, скорости вращения двигателей, а также в управлении силовым транзистором блоков питания (БП) импульсного типа.
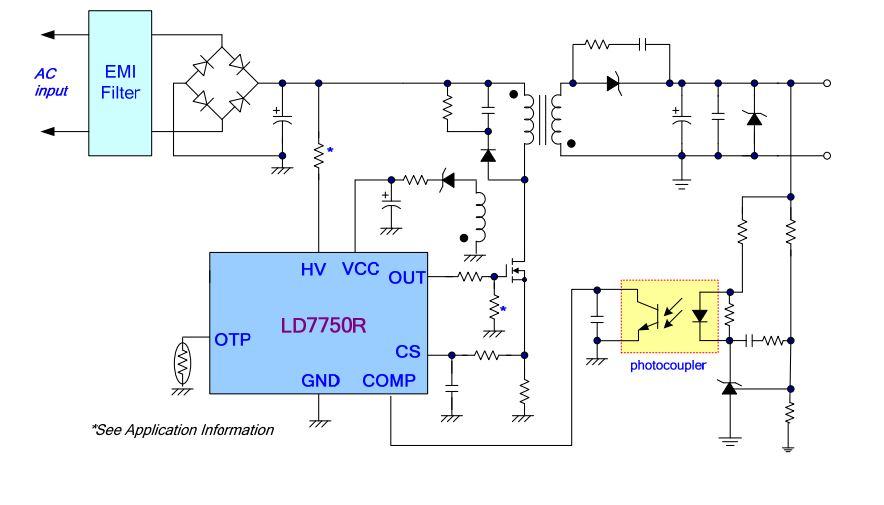
Широтно-импульсная (ШИ) модуляция активно используется в построении систем управления яркостью светодиодов. Благодаря низкой инерционности, светодиод успевает переключаться (вспыхивать и гаснуть) на частоте в несколько десятков кГц. Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана .
Подаваемое на вход микросхемы драйвера сетевое напряжение постоянно сравнивается с внутрисхемным опорным напряжением, формируя на выходе сигнал ШИМ (ЧИМ), параметры которого задаются внешними резисторами. Некоторые микросхемы имеют вывод для подачи аналогового или цифрового сигнала управления. Таким образом, работой импульсного драйвера можно управлять с помощью другого ШИ-преобразователя. Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Масштабное применение ШИМ отражено во всех LCD панелях со светодиодной подсветкой. К сожалению, в LED мониторах большая часть ШИ-преобразователей работает на частоте в сотни Герц, что негативно отражается на зрении пользователей ПК.
Микроконтроллер Ардуино тоже может функционировать в режиме ШИМ контроллера. Для этого следует вызвать функцию AnalogWrite() с указанием в скобках значения от 0 до 255. Ноль соответствует 0В, а 255 – 5В. Промежуточные значения рассчитываются пропорционально.
Повсеместное распространение устройств, работающих по принципу ШИМ, позволило человечеству уйти от трансформаторных блоков питания линейного типа. Как результат – повышение КПД и снижение в несколько раз массы и размеров источников питания.
ШИМ-контроллер является неотъемлемой частью современного импульсного блока питания. Он управляет работой силового транзистора, расположенного в первичной цепи импульсного трансформатора. За счёт наличия цепи обратной связи напряжение на выходе БП всегда остаётся стабильным. Малейшее отклонение выходного напряжения через обратную связь фиксируется микросхемой, которая мгновенно корректирует скважность управляющих импульсов. Кроме этого современный ШИМ-контроллер решает ряд дополнительных задач, способствующих повышению надёжности источника питания:
- обеспечивает режим плавного пуска преобразователя;
- ограничивает амплитуду и скважность управляющих импульсов;
- контролирует уровень входного напряжения;
- защищает от короткого замыкания и превышения температуры силового ключа;
- при необходимости переводит устройство в дежурный режим.
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов. Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства. Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Пример использования ШИМ регулятора
Один из вариантов реализации ШИМ простого регулятора уже описывался ранее в . Он построен на базе микросхемы и имеет небольшую обвязку. Но, несмотря на простату схемы, регулятор имеет довольно широкую область применения: схемы управления яркости светодиодов, светодиодных лент, регулировка скорость вращения двигателей постоянного тока.
Читайте так же
Вот приспичило вам сделать себе могучую светодиодную хреновину, чтобы моргала и переливалась. Да еще в RGB и плавненько так. Собрали вы это дело, поглядели на количество каналов которыми нужно рулить и призадумались…
▌А что не так с ШИМ?
Да все с ним хорошо, только аппаратных каналов обычно всего несколько штук. А программный ШИМ имеет ряд недостатков. Да, можно взять и на базе , используя всего один таймер собрать многоканальный ШИМ, но сколько у нас будет вызовов прерываний?
Каждый отдельный фронт потребует своего прерывания на смену уровня. А представьте, что у нас этих каналов будет не 4, а 40? Или 400? Да контроллер из прерываний вылезать не будет. Прерывания будут налезать друг на друга, порождая джиттер. Не говоря уже о том, что все эти каналы надо будет при любом изменении скважности заново сортировать по длительности. В общем, тупилово будет еще то.
▌Нас спасет BAM
Но решение есть. Зовется этот метод BAM. Суть его в том, что мы включаем нагрузку импульсами, поразрядно, с длительностью равной весу разряда.
В результате мы имеем высокую дискретность, но при этом у нас всего 7 прерываний на любое число каналов. Соответственно разрядам.
Интегрируется все аналогично обычному ШИМу. Но есть ряд нюансов:
- Частота плавает и на малых разрядах она повышается. Для светодиода или грелки это наплевать. А вот двигатель или еще какую нагрузку с реактивными элементами вроде обмоток или емкостей я бы таким сигналом питать не стал.
- При переходе с малых весов к одному большому наблюдается мерцание. Но с этим можно бороться, подробности ниже.
- Выдавать вес лучше с большего к меньшему, так меньше заметно влияние второго пункта.
Микросхемы для импульсных источников питания. Справочник.
Издательство: Додэка.
Очень неплохой справочник. Замечателен тем, что является… самым обычным переводом даташитов. Один в один, картинка в картинку.
Переведенных даташитов там тьма, один только перечень в четыре колонки занимает десяток страниц. Все импульсные микросхемы которые знал там нашел! А что особенно радует, так это то, что есть документация на отечественную комплектуху. С коей вечно проблемы. Если аналог не подберешь, и не дернешь бумагу на него — пиши пропало.
DC-DC преобразование
Для изменения напряжения постоянного тока с минимальными потерями используются DC-DC преобразователи, работающие по принципу Широтно-Импульсной Модуляции (ШИМ , она же PWM по басурмански). Если не читал мои прошлые статьи, где я подробно разжевал принцип работы ШИМ , то я кратенько тебе напомню. Основной принцип тут в том, что напряжение подается не сплошным потоком, как в линейных стабилизаторах, а краткими импульсами и с большой частотой.
То есть у тебя на выходе ШИМ контроллера, например, сначала в течении десяти микросекунд напряжение, к примеру, двенадцать вольт, потом идет пауза. Скажем, те же десять микросекунд, когда на выходе напряжения вообще нет. Затем все повторяется, словно мы быстро-быстро включаем и выключаем рубильник.
Таким образом у нас получаются прямоугольные импульсы. Если вспомнить матан, а конкретно интегрирование, то после интегрирования этих импульсов мы получим площадь под фигурой очерченной импульсами. Таким образом, меняя ширину импульсов и пропуская их через интегратор, можно плавно менять напряжения от нуля до максимума с любым шагом и практически без потерь.
В качестве интегратора служит конденсатор, он заряжается на пике, а на паузах будет отдавать энергию в цепь. Также туда всегда последовательно ставят дроссель, который тоже служит источником энергии, только он запасает и отдает ток. Поэтому такие преобразователи при небольших габаритах легко питают мощную нагрузку и при этом почти не расходуют энергию на лишний нагрев.
Если не догнал, то я для простоты переложил это в понятное «канализационное русло» . Смотри на картинку, где ключевой транзистор ШИМ контроллера похож на вентиль , он открывает и закрывает канал. Конденсатор это банка, накапливающая энергию. Дроссель это массивная турбина, которая, будучи разогнанной потоком, при открытом вентиле, за счет своей инерции прогоняет воду по трубам и после закрытия вентиля.
Конечно, самостоятельно разработать такой источник питания сложно, требуется неслабое образование в области электроники, но не стоит напрягаться по этому поводу. Умные дядьки из Motorola, STM, Dallas и прочих Philips ’ов придумали все за нас и выпустили уже готовые микросхемы содержащие в себе ШИМ контроллер. Тебе остается его лишь припаять и добавить обвески, которая задает параметры работы, причем изобретать самому ничего не надо, в datasheet’ах подробно расписано что и как подключать, какие номиналы выбирать, а иногда даже дают готовый рисунок печатной платы. Надо лишь немного знать английский:)
Пока писал статью про UART пришла в голову одна извращенная идея — на базе UART же можно организовать самый натуральный низкодискретный ШИМ!
Достаточно только сделать где-нибудь в памяти переменную, куда мы будем совать число с заданной скважностью нулей и единиц, а по прерыванию опустошения буфера это число снова пихать в регистр UDRE. Таким образом, генерация ШИМ будет самопроизвольной, без лишних телодвижений. Правда можно получить всего 10 разных значений ШИМ, но зато нахаляву!!!
Для тех кто не понял как, приведу числа которые надо будет непрерывно слать через UART:
два дополнительных значения мы получим за счет старт и стоп битов.
00000000 — 1/10
00000001 — 2/10
00000011 — 3/10
00000111 — 4/10
00001111 — 5/10
00011111 — 6/10
00111111 — 7/10
01111111 — 8/10
11111111 — 9/10
Да и частоты там можно получить нефиговые!
Красота!=)))))
Вот уже несколько раз я ругался странным словом ШИМ . Пора бы внести ясность и разьяснить что же это такое. Вообще, я уже , но все же повторюсь в рамках своего курса.
Вкратце, Широтно Импульсная Модуляция (в буржуйской нотации этот режим зовется PWM — Pulse Width Modulation ) это способ задания аналогового сигнала цифровым методом , то есть из цифрового выхода, дающего только нули и единицы получить какие то плавно меняющиеся величины. Звучит как бред, но тем не менее работает. А суть в чем:
Представь себе тяжеленный маховик который ты можешь вращать двигателем. Причем двигатель ты можешь либо включить, либо выключить. Если включить его постоянно, то маховик раскрутится до максимального значения и так и будет крутиться. Если выключить, то остановится за счет сил трения.
А вот если двигатель включать на десять секунд каждую минуту, то маховик раскрутится, но далеко не на полную скорость — большая инерция сгладит рывки от включающегося двигателя, а сопротивление от трения не даст ему крутится бесконечно долго.
Чем больше продолжительность включения двигателя в минуту, тем быстрей будет крутится маховик.
При ШИМ мы гоним на выход сигнал состоящий из высоких и низких уровней (применимо к нашей аналогии — включаем и выключаем двигатель), то есть нулей и единицы. А затем это все пропускается через интегрирующую цепочку (в аналогии — маховик). В результате интегрирования на выходе будет величина напряжения, равная площади под импульсами.
Пропорциональное управление – залог тишины!
Какая задача ставится перед нашей системой управления? Да чтобы пропеллеры зря не вращались, чтобы зависимость скорости вращения была от температуры. Чем горячее девайс — тем быстрей вращается вентилятор. Логично? Логично! На том и порешим.
Заморачиваться с микроконтроллерами конечно можно, в чем то будет даже проще, но совершенно не обязательно. На мой взгляд проще сделать аналоговую систему управления — не надо будет заморачиваться с программированием на ассемблере.
Будет и дешевле, и проще в наладке и настройке, а главное любой при желании сможет расширить и надстроить систему по своему вкусу, добавив каналов и датчиков. Всё что от тебя потребуется это лишь несколько резисторов, одна микросхема и термодатчик. Ну а также прямые руки и некоторый навык пайки.
В схемотехнике современных импульсных источников питания (ИИП) приобрели широкую популярность ШИМ-регуляторы, выполненные в малогабаритных планарных корпусах с шестью выводами. Обозначение типа корпуса может быть SOT-23-6, SOT-23-6L, SOT-26, TSOP-6, SSOT-6. Внешний вид и расположение выводов показаны на рисунке ниже. В данном случае на левом фрагменте картинки представлена кодовая маркировка LD7530A
Назначение выводов:
1 — GND. (Общий провод).
2 — FB. (FeedBack — Обратная Связь). Вход для управления длительностью импульсов сигналом с выходного напряжения. Иногда может иметь обозначение COMP (входной компаратор).
3 — RI/RT/CT/COMP/NC — В зависимости от типа микросхемы, может быть задействован для частотозадающей RC цепи (RI/RT/CT), либо для организации защиты, как вход компаратора отключения ШИМ при пороговом значение на его входе, указанном в документе. В некоторых типах микросхем этот вход может быть никак не задействован (NC — No Connect).
4 — SENSE, по другому CS (Current Sense) — Вход с датчика тока в истоке ключа.
5 — VCC — Вход напряжения питания и запуска микросхемы.
6 — OUT (GATE) — Выход для управления затвором (Gate) ключа.
Функционально подобные регуляторы работают по принципу популярных ранее микросхем ШИМ серии xx384x, которые хорошо зарекомендовали себя в плане надёжности и устойчивости.
Некоторые затруднения часто возникают при замене или выборе аналога для подобных ШИМ-регуляторов по причине применения кодовой маркировки в обозначении типа микросхем. Ситуация осложняется большим количеством производителей компонентов, которые не всегда предоставляют документацию в массовый доступ, так же не все производители готовых устройств снабжают схемами ремонтные сервисные центры, поэтому реальные схемные решения ремонтникам часто приходится изучать по установленным компонентам и монтажным соединениям непосредственно на плате.
В практике часто встречаются микросхемы ШИМ и кодом маркировки EAxxx и Eaxxx. Официальной документации на них не найдено в свободном доступе, но сохранились обсуждения на форумах и кусочки картинок из PDF от System General, которая публикует их как SG6848T и SG6848T2. Рисунок прилагается.
Вниманию мастеров предлагаем таблицы, составленные из доступной в интернете информации и документов PDF для подбора аналогов при замене наиболее распространённых шестиногих планарных ШИМ c цоколёвкой выводов: pin1 — GND, pin2 — FB (COMP), pin4 — Sense, pin5 — Vcc, pin6 — OUT.
Основным их различием является применение и назначение вывода 3.
ШИМ-регуляторы (PWM), без использования вывода 3.
| Name | Part Namber | Diler | Marking |
|---|---|---|---|
| SG6849 | SG684965TZ | Fairchild / ON Semi | BBxx |
| SG6849 | SG6849-65T, SG6849-65TZ | System General | MBxx EBxx |
| SGP400 | SGP400TZ | System General | AAKxx |
ШИМ-регуляторы (PWM) с установкой резистора 95-100 kOhm на вывод 3.
Применяя перечисленные ниже ШИМ, частоту следует установить резистором RT (RI) от вывода 3 на землю. Обычно его номинал выбирается 95-100 kOhm для частоты 65-100 KHz. Более точно смотрите в прилагаемой документации. Файлы PDF упакованы в RAR.
| Name | Part Namber | Diler | Marking |
|---|---|---|---|
| AP3103A | AP3103AKTR-G1 | Diodes Incorporated | GHL |
| AP8263 | AP8263E6R, A8263E6VR | AiT Semiconductor | S1xx |
| AT3263 | AT3263S6 | ATC Technology | 3263 |
| CR6848 | CR6848S | Chip-Rail | 848h26 |
| CR6850 | CR6850S | Chip-Rail | 850xx |
| CR6851 | CR6851S | Chip-Rail | 851xx |
| FAN6602R | FAN6602RM6X | Fairchild / ON Semi | ACCxx |
| FS6830 | FS6830 | FirstSemi | |
| GR8830 | GR8830CG | Grenergy | 30xx |
| GR8836 | GR8836C, GR8836CG | Grenergy | 36xx |
| H6849 | H6849NF | HI-SINCERITY | |
| H6850 | H6850NF | HI-SINCERITY | |
| HT2263 | HT2263MP | HOT-CHIP | 63xxx |
| KP201 | Kiwi Instruments | ||
| LD5530 | LD5530GL LD5530R | Leadtrand | xxt30 xxt30R |
| LD7531 | LD7531GL, LD7531PL | Leadtrend | xxP31 |
| LD7531A | LD7531AGL | Leadtrend | xxP31A |
| LD7535/A | LD7535BL, LD7535GL, LD7535ABL, LD7535AGL | Leadtrend | xxP35-xxx35A |
| LD7550 | LD7550BL, LD7550IL | Leadtrend | xxP50 |
| LD7550B | LD7550BBL, LD7550BIL | Leadtrend | xxP50B |
| LD7551 | LD7551BL/IL | Leadtrend | xxP51 |
| LD7551C | LD7551CGL | Leadtrend | xxP51C |
| NX1049 | XN1049TP | Xian-Innuovo | 49xxx |
| OB2262 | OB2262MP | On-Bright-Electronics | 62xx |
| OB2263 | OB2263MP | On-Bright-Electronics | 63xx |
| PT4201 | PT4201E23F | Powtech | 4201 |
| R7731 | R7731GE/PE | Richtek | 0Q= |
| R7731A | R7731AGE | Richtek | IDP=xx |
| SD4870 | SD4870TR | Silan Microelectronics | 4870 |
| SF1530 | SF1530LGT | SiFirst | 30xxx |
| SG5701 | SG5701TZ | System General | AAExx |
| SG6848 | SG6848T, SG6848T1, SG6848TZ1, SG6848T2 | Fairchild / ON Semi | AAHxx EAxxx |
| SG6858 | SG6858TZ | Fairchild / ON Semi | AAIxx |
| SG6859A | SG6859ATZ, SG6859ATY | Fairchild / ON Semi | AAJFxx |
| SG6859 | SG6859TZ | Fairchild / ON Semi | AAJMxx |
| SG6860 | SG6860TY | Fairchild | AAQxx |
| SP6850 | SP6850S26RG | Sporton Lab | 850xx |
| SP6853 | SP6853S26RGB, SP6853S26RG | Sporton Lab | 853xx |
| SW2263 | SW2263MP | SamWin | |
| UC3863/G | UC3863G-AG6-R | Unisonic Technologies Co | U863 U863G |
ШИМ-регуляторы, в которых вывод 3 используется иначе.
При использовании перечисленных ниже ШИМ (PWM-контроллеров) следует обратить внимание на вывод 3, который может использоваться для организации защиты — тепловой или от превышения входного напряжения.
Частота может быть фиксированной 65kHz, либо устанавливаться номиналом конденсатора на выводе 3.
При замене любых микросхем на аналоги внимательно изучайте документацию. Файлы PDF упакованы в архив RAR.
| Name | Part Namber | Diler | Marking |
|---|---|---|---|
| AP3105/V/L/R | AP3105KTR-G1, AP3105VKTR-G1, AP3105LKTR-G1, AP3105RKTR-G1 | Diodes Incorporated | GHN GHO GHP GHQ |
| AP3105NA/NV/NL/NR | AP3105NAKTR-G1, AP3105NVKTR-G1, AP3105NLKTR-G1, AP3105NRKTR-G1 | Diodes Incorporated | GKN GKO GKP GKQ |
| AP3125A/V/L/R | AP3125AKTR-G1, AP3125VKTR-G1, AP3125LKTR-G1, AP3125RKTR-G1 | Diodes Incorporated | GLS GLU GNB GNC |
| AP3125B | AP3125BKTR-G1 | Diodes Incorporated | GLV |
| AP3125HA/HB | AP3125HAKTR-G1, AP3125HBKTR-G1 | Diodes Incorporated | GNP GNQ |
Для обычного человека, не вникающего в электронику, был незаметен переход всех питающих устройств с линейных на импульсные. Именно импульсные источники (ИИП) питания устанавливаются во всей современной аппаратуре. Основная причина перехода на такой тип преобразователей напряжения — это уменьшение габаритов. Так как всё время, с начала появления и изобретения, электронные приборы требуют постоянного уменьшения их размеров. На рисунке изображен для сравнения габариты обычного и импульсного источника постоянного тока. Не вооруженным глазом видны различия в размерах.
Принцип действия ИИП и его устройство
Импульсный источник питания — это устройство, которое работает по принципу инвертора, то есть сначала преобразует переменное напряжение в постоянное, а потом снова из постоянного делает переменное нужной частоты. В конечном итоге последний каскад преобразователя всё равно основан на выпрямлении напряжения, так как большинство приборов всё же работают на пониженном постоянном напряжении. Суть уменьшения габаритов этих питающих и преобразующих устройств построена на работе трансформатора. Дело в том, что трансформатор не может работать с постоянным напряжением. Просто-напросто на выходе вторичной обмотки при подаче на первичную постоянного тока не будет индуктироваться ЭДС (электродвижущая сила). Для того чтобы на вторичной обмотке появилось напряжения оно должно меняться по направлению или же по величине. Переменное напряжение обладает этим свойством, ток в нём меняет своё направление и величину с частотой 50 Гц. Однако, чтобы уменьшить габариты самого блока питания и соответственно трансформатора, являющегося основой гальванической развязки, нужно увеличить частоту входного напряжения.
При этом импульсные трансформаторы, в отличие от обычных линейных, имеют ферритовый сердечник магнитопровода, а не стальной из пластин. И также современные блоки питания работающие по этому принципу состоят из:
- выпрямителя сетевого напряжения;
- генератора импульсов, работающего на основе ШИМ (широтно-импульсная модуляция) или же триггера Шмитта;
- преобразователя постоянного стабилизированного напряжения.
После выпрямителя сетевого напряжения генератор импульсов с помощью ШИМ генерирует его в переменное с частотой около 20–80 кГц. Именно это повышение с 50 Гц до десятков кГц и позволяет значительно уменьшить, и габариты, и массу источника питания. Верхний диапазон мог быть и больше, однако, тогда устройство будет создавать высокочастотные помехи, которые будет влиять на работу радиочастотной аппаратуры. При выборе ШИМ стабилизации обязательно нужно учитывать также и высшие гармоники токов.
Даже при работе на таких частотах эти импульсные устройства вырабатывают высокочастотные помехи. А чем больше их в одном помещении или в одном закрытом помещении тем больше их в радиочастотах. Для поглощения этих негативных влияний и помех устанавливаются специальные помехоподавляющие фильтры на входе устройства и на его выходе.
Это наглядный пример современного импульсного блока питания применяемого в персональных компьютерах.
A — входной выпрямитель. Могут применяться полумостовые и мостовые схемы. Ниже расположен входной фильтр, имеющий индуктивность;
B — входные с довольно большой емкостью сглаживающие конденсаторы. Правее установлен радиатор высоковольтных транзисторов;
C — импульсный трансформатор. Правее смонтирован радиатор низковольтных диодов;
D — катушка выходного фильтра, то есть дроссель групповой стабилизации;
E — конденсаторы выходного фильтра.
Катушка и большой жёлтый конденсатор, находящиеся ниже E, являются компонентами дополнительного входного фильтра, установленного непосредственно на разъёме питания, и не являющегося фрагментом основной печатной платы.
Если схему радиолюбитель изобретает сам то он обязательно заглядывает в справочник по радиодеталям. Именно справочник является основным источником информации в данном случае.
Обратноходовой импульсный источник питания
Это одна из разновидностей импульсных источников питания, имеющих гальваническую развязку как первичных, так и вторичных цепей. Сразу был изобретён именно этот вид преобразователей, который был запатентован ещё в далёком 1851 году, а его усовершенствованный вариант применялся в системах зажигания и в строчной развертке телевизоров и мониторов, для подачи высоковольтной энергии на вторичный анод кинескопа.
Основная часть этого блока питания тоже трансформатор или может быть дроссель. В его работе есть два этапа:
- Накопление электрической энергии от сети или от другого источника;
- Вывод накопленной энергии на вторичные цепи полумоста.
Во время размыкания и замыкания первичной цепи во вторичной появляется ток. Роль размыкающего ключа выполнял чаще всего транзистор. Узнать параметры которого нужно обязательно использовать справочник. управление же этим транзистором чаще всего полевым выполняется за счёт ШИМ-контроллера.
Управление ШИМ-контроллером
Преобразование сетевого напряжения, которое уже прошло этап выпрямления, в импульсы прямоугольной формы выполняется с какой-то периодичностью. Период выключения и включения этого транзистора выполняется с помощью микросхем. ШИМ-контроллеры этих ключей являются основным активным управляющим элементом схемы. В данном случае как прямоходовой, так и обратноходовой источник питания имеет трансформатор, после которого происходит повторное выпрямление.
Для того чтобы с увеличением нагрузки не падало выходное напряжение в ИИП была разработана обратная связь которая была заведена непосредственно в ШИМ-контроллеры. Такое подключение даёт возможность полной стабилизации управляемым выходным напряжения путём изменения скважности импульсов. Контроллеры, работающие на ШИМ модуляции, дают большой диапазон изменения выходного напряжения.
Микросхемы для импульсных источников питания могут быть отечественного или зарубежного производства. Например, NCP 1252 – ШИМ-контроллеры, которые имеют управление по току, и предназначены для создания обоих видов импульсных преобразователей. Задающие генераторы импульсных сигналов этой марки показали себя как надёжные устройства. Контроллеры NCP 1252 обладают всеми качественными характеристиками для создания экономически выгодных и надежных блоков питания. Импульсные источники питания на базе этой микросхемы применяются во многих марках компьютеров, телевизоров, усилителей, стереосистем и т. д. Заглянув в справочник можно найти всю нужную и подробную информацию обо всех её рабочих параметрах.
Преимущество импульсных источников питания перед линейными
В источниках питания на импульсной основе видны целый ряд преимуществ, которые качественно выделяют их от линейных. Вот основные из них:
- Значительное снижение габаритов и массы устройств;
- Уменьшение количества дорогостоящих цветных металлов, таких как медь, используемых в их изготовлении;
- Отсутствие проблем при возникновении короткого замыкания, в большей степени это касается обратноходовых устройств;
- Отличная плавная регулировка выходного напряжения, а также его стабилизация путём введения обратной связи в ШИМ-контроллеры;
- Высокие показатели КПД.
Однако, как и всё в этом мире, импульсные блоки имеют свои недостатки:
- Излучение помех, которые могут появляется при неисправных помехоподавляющих цепочек, чаще всего это высыхание электролитических конденсаторов;
- Нежелательная работа их без нагрузки;
- Более сложная схема с применением большего количества деталей для поиска аналогов которых необходим справочник.
Применение источников питания на основе высокочастотной модуляции (в импульсных) в современной электронике как в быту, так и на производстве, существенно повлияли на развитие всей электронной техники. Они давно вытеснили с рынка устаревшие источники, построенные на традиционной линейной схеме, и в дальнейшем будут только усовершенствоваться. ШИМ-контроллеры при этом являются сердцем этого аппарата и развитие их функциональности и технических характеристик постоянно улучшается.
Видео о работе импульсного источника питания
Подробнее о ШИМ контроллерах: varyag_nord — LiveJournal
Микросхем ШИМ очень большое разнообразие. Но принцип действия у всех одинаков. На схемах он часто называется PWM.
Наиболее популярные корпуса это DIP-8 и TO-220
Основные отличия ШИМ контроллеров:
1. Тип корпуса
2. Распиновка
3. Мощность
4. Частота работы
Схемы включения:
1. На примере Viper22
SOURCE, SRC, S — это 1 и 2 выводы исток, к нему подводится «-» с диодного моста.
FEED BACK FB — это 3 вывод. Обратная связь идет на оптопару (может бытьPH817 или KIA817)
VDD — Это плюс питания ШИМ. Браться оно может как со второй первичной обмотки (см. схему выше), так и со вторичной (на рисунке не представлено).
2. На примере DM311:
Второй вывод первичной идет на DRAIN 6,7,8
Минусовой общий провод на первый вывод
Второй вывод на VDD
Третий вывод это FB
Четвертый вывод это через обвязочный резистор на корпус.
Пятый вывод стартового питания бывает идет с плюса после входного кондера через резисторы. А бывает он запитывается с переменочки перед диодным мостом, через дополнительный диод и резисторы.
Часто бывает, что резистор или диод на стартовом питании вылетают и ШИМ не запускается.
3.Пример ШИМ на микросхеме STR A6252
D — DRAIN — 7 и 8 выводы идут на первичную катушку.
GND — 3 вывод На корпус на общий провод.
S\DCP — первый вывод. Резистор обвязки.
FM/SS второй вывод — конденсатор обвязки
FB — четвертый вывод, обратная связь
VCC — Питание
4. Микросхема FSDM0565R
DRAIN — на первичную обмотку
GND — на корпус
VCC — Питание
FeedBack — обратная связь. Идет на оптопару.
N.C. — вывод не используется
Vstr — стартовое напряжение в момент запуска.
При подборе аналога, надо ставить микросхему не слабее по мощности и с такой же частотой.
Если у Вас есть, что-то дополнить или исправить, пишите комментарий 🙂
Часто встречающиеся микросхемы:
1. Viper22
2. FSDM311
3. FSDh421
4. STR A6252
Подбор микросхемы ШИМ:
Если при ремонте, микросхему до Вас кто-то выпаял или она расколота и затруднительно её опознать, то можно воспользоваться специальным сервисом по опознанию микросхем. В этом сервисе необходимо ввести данные о том какие дорожки к каким выводам микросхемы на плате подходят.
Например:
Если первая дорожка идет на конденсатор и на корпус — это может быть какая-то обвязка.
Второй вывод идет через керамический конденсатор на общий провод, затем стабилитрон и через резистор на оптопару — значит второй вывод это FB
третий через резистор и конденсатор на корпус.
4 и 5 соединены вместе и через дроссель идут на первичную обмотку — значит это DRAIN
6 — пустой — N\C
7 — электролит на корпус и через резисторы подпитка и с диода питание, значит — VDD/VCC
8 — на корпус.
Таблица есть на сайте. http://remont-aud.net/ic_power/ Там же есть каталог аналогов и схемы включения.
Если мы подобрали по частоте, мощности и распиновке аналогичную микросхему, но у новой есть стартовое питание, а у старой нет, то надо посмотреть схему включения и возможно подать плюс через резистор на стартовое питание новой микросхемы.
широтно-импульсной модуляции (ШИМ) | Видео о круговых навыках Collin Cunningham
ШИМ-контроллер: устройства управления с помощью цифрового сигнала
Коллин Каннингем.Широтно-импульсная модуляция (ШИМ) — очень умный способ использовать электричество для управления аналоговыми устройствами с помощью цифрового сигнала. Это очень простой метод, который очень эффективен при управлении двигателями, лампами, светодиодами и многим другим!
Прекрасный пример использования ШИМ — это если вы когда-либо приглушали светодиод с помощью Arduino:
Затухание — Демонстрирует использование функции analogWrite () для затухания и включения светодиода.AnalogWrite использует широтно-импульсную модуляцию (PWM), очень быстро включающую и выключающую цифровой вывод для создания эффекта затухания.
Однако вам не нужен микроконтроллер для генерации сигнала ШИМ. Микросхему таймера 555 можно настроить так, чтобы ее выходной рабочий цикл зависел от потенциометра — с помощью некоторых простых схем.
Создайте свой собственный комплект широтно-импульсного модулятора Навыки схемы : видео с широтно-импульсной модуляцией
Для более надежного решения вы можете рассмотреть комплект DC to Pulse Width Modulator, подходящий для отправки до 6.5 А и построен на базе Motorola SG3525 — микросхемы, посвященной искусству ШИМ.
Конечно, Коллин отрицал бы свою природу, если бы не упомянул хотя бы одно приложение, связанное со звуком. ШИМ пригодится для генерации простых звуков и мелодий с микроконтроллера.
Arduino Simple Sounds
Wavetable Melody Generator
Щелкните здесь для просмотра технических данных Velleman K8004.
Видео «Сделай сам» по другим схемам от Collin:
Травление печатных платФункциональный генератор и корпуса
Инфракрасный световой барьер
Светодиодный цветной орган
Прототипирование перфорированной платы
Источник питания
Устройства для поверхностного монтажа
Волоконная оптика
Комплект светодиодной матрицы
Если вы решите создать модульный комплект от постоянного тока к ширине импульса, мы хотели бы услышать о ваших результатах! Отправьте свою историю на [адрес электронной почты]
Как сделать ШИМ-контроллер скорости двигателя постоянного тока с использованием таймера 555 IC
В этом уроке мы узнаем, как создать ШИМ-контроллер скорости двигателя постоянного тока с использованием микросхемы таймера 555.Мы подробно рассмотрим, как работает схема генератора ШИМ с таймером 555, как использовать ее для управления скоростью двигателя постоянного тока и как сделать для нее специальную печатную плату.
РЕКОМЕНДУЕТСЯ Обзор
Мы можем контролировать скорость двигателя постоянного тока, контролируя входное напряжение двигателя. Для этого мы можем использовать ШИМ или широтно-импульсную модуляцию.
ШИМ-регулятор скорости двигателя постоянного тока
PWM — это метод, с помощью которого мы можем генерировать переменное напряжение, быстро включая и выключая питание, которое подается на электронное устройство.Среднее напряжение зависит от рабочего цикла сигнала или количества времени, в течение которого сигнал находится в состоянии ВКЛ, по сравнению с количеством времени, в течение которого сигнал отключен за один период времени.
Цепь генератора ШИМ таймера 555
Таймер 555 может генерировать сигнал ШИМ при настройке в нестабильный режим. Если вы не знакомы с таймером 555, вы можете проверить мое предыдущее руководство, где я подробно объяснил, что находится внутри и как работает микросхема таймера 555.
Вот базовая схема таймера 555, работающего в нестабильном режиме, и мы можем заметить, что выходной сигнал ВЫСОКИЙ, когда конденсатор C1 заряжается через резисторы R1 и R2.
С другой стороны, выход IC имеет низкий уровень, когда конденсатор C1 разряжается, но только через резистор R2. Таким образом, мы можем заметить, что если мы изменим значения любого из этих трех компонентов, мы получим разные времена включения и выключения или другой рабочий цикл выходного сигнала прямоугольной формы. Простой и мгновенный способ сделать это — заменить резистор R2 на потенциометр и дополнительно добавить в схему два диода.
В этой конфигурации время включения будет зависеть от резистора R1, левой стороны потенциометра и конденсатора C1, а время выключения будет зависеть от конденсатора C1 и правой стороны потенциометра.Мы также можем заметить, что в этой конфигурации период одного цикла, то есть частота, всегда будет одинаковой, потому что полное сопротивление во время зарядки и разрядки останется неизменным.
Обычно сопротивление R1 намного меньше, чем сопротивление потенциометра, например, 1 кОм по сравнению с 100 кОм потенциометра. Таким образом, мы на 99% контролируем сопротивление заряда и разряда в цепи. Управляющий вывод таймера 555 не используется, но он подключен к конденсатору емкостью 100 нФ, чтобы устранить любые внешние помехи от этого вывода.Сброс, контакт номер 4, активен на низком уровне, поэтому он подключен к VCC, чтобы предотвратить любой нежелательный сброс выхода.
Выход таймера 555 может потреблять или передавать ток 200 мА в нагрузку. Поэтому, если двигатель, которым мы хотим управлять, превышает это значение, нам нужно использовать транзистор или полевой МОП-транзистор для управления двигателем. В этом примере я использовал транзистор Дарлингтона (TIP122), который может выдерживать ток до 5А.
Выход микросхемы необходимо подключить к базе транзистора через резистор, и в моем случае я использовал резистор 1 кОм.Для предотвращения скачков напряжения, создаваемых двигателем, нам необходимо использовать обратный диод, который подключен параллельно двигателю.
Разработка печатной платы для ШИМ-контроллера скорости двигателя постоянного тока
Теперь мы можем перейти к разработке специальной печатной платы для этой схемы. Для этого я воспользуюсь бесплатным онлайн-программным обеспечением EasyEDA. Здесь мы можем начать с поиска и размещения компонентов на пустом холсте. Библиотека состоит из сотен тысяч компонентов, поэтому у меня не возникло проблем с поиском всех необходимых компонентов для этой схемы ШИМ-контроллера скорости двигателя постоянного тока.
После вставки компонентов нам нужно создать контур платы и начать расположение компонентов. Два конденсатора должны быть размещены как можно ближе к таймеру 555, в то время как другие компоненты могут быть размещены где угодно, но все же в логическом порядке в соответствии с принципиальной схемой.
Используя инструмент отслеживания, нам нужно соединить все компоненты. Инструмент отслеживания интуитивно понятен и с ним легко работать. Мы можем использовать как верхний, так и нижний слой, чтобы избежать пересечений и сделать пути короче.
Контактные площадки компонентов, которые необходимо подключить к заземлению, устанавливаются на «Земля» на вкладке «Свойства контактной площадки», где нам нужно ввести GND в метку «Сеть», когда контактная площадка выбрана.
Мы можем использовать слой Silk, чтобы добавить текст на доску. Также мы можем вставить файл изображения, поэтому я добавляю изображение логотипа своего веб-сайта, которое будет напечатано на доске. В конце, используя инструмент области меди, нам нужно создать область заземления печатной платы.
Здесь вы можете найти файлы проекта EasyEDA этого проекта.
Когда мы закончим проектирование, нам просто нужно нажать кнопку «Вывод Gerber», сохранить проект, и мы сможем загрузить файлы Gerber, которые используются для изготовления печатной платы. Мы можем заказать печатную плату у JLCPCB, которая является услугой по изготовлению печатных плат EasyEDA, а также является спонсором этого видео.
Здесь мы можем просто перетащить загруженный zip-файл с файлами gerber. После загрузки мы можем еще раз просмотреть печатную плату в программе просмотра Gerber.Если все в порядке, мы можем выбрать до 10 печатных плат и получить их всего за 2 доллара.
Сборка печатной платы контроллера скорости двигателя постоянного тока с ШИМ
Тем не менее, через неделю печатные платы были доставлены, и я должен признать, что создание собственной конструкции печатной платы весьма приятно. Качество печатных плат отличное, все точно так же, как и в дизайне.
Хорошо, теперь мы можем перейти к вставке компонентов на плату.
Вы можете получить компоненты, необходимые для этого примера, по ссылкам ниже:
Раскрытие информации: это партнерские ссылки.Как партнер Amazon я зарабатываю на соответствующих покупках.
Сначала я вставил более мелкие компоненты, резисторы, диоды и конденсаторы.
Я согнул их выводы с другой стороны, чтобы они оставались на месте, когда я переворачиваю плату для пайки. Что касается более крупных компонентов, я использовал малярную ленту, чтобы удерживать их на месте при переворачивании платы.
Вот окончательный вид платы, и теперь осталось подключить двигатель постоянного тока и подходящий источник питания для него.
Я использовал двигатель постоянного тока с высоким крутящим моментом 12 В, который я питал от литий-ионных батарей 3,7 В, соединенных последовательно, что дает около 12 В. Итак, теперь, используя потенциометр, мы можем контролировать скорость двигателя постоянного тока или сигнал ШИМ, генерируемый микросхемой таймера 555.
Надеюсь, вам понравился этот урок и вы узнали что-то новое. Не стесняйтесь задавать любой вопрос в разделе комментариев ниже.
12V NE555 PWM Controller Менее 3 $
При изготовлении моей настольной мини-пилы я купил модуль контроллера скорости двигателя 12 В на eBay.Я подумал, что справедливо … это было более легкое и прямое решение. Но потом я решил сделать свою.
Я немного покопался в сети и нашел довольно хорошую отправную точку в Circuits Today, но затем мне потребовалось внести некоторые изменения и настройки схемы. Я хотел добавить в конструкцию тумблер, розетку постоянного тока и 2-контактный винтовой зажим, чтобы упростить его изготовление и использование.
Были и другие незначительные изменения, которые я внес в дизайн по ходу работы, для удобства и для удовлетворения моих конкретных потребностей.
Еще хочу отметить, что эта схема не просто контроллер скорости двигателя, а ШИМ-контроллер. С одной стороны, это означает, что он может гораздо больше, чем просто изменять скорость двигателя постоянного тока. Эта схема будет выдавать ток 12 В с изменяющимся рабочим циклом. Его можно использовать как 12 В постоянного тока:
- Регулятор скорости двигателя;
- Светодиодный диммер;
- Терморегулятор для устройства для резки горячей проволоки для полистирола;
- регулятор напряжения электролитического травителя; и
- и т. д.
Область применения этой схемы ограничена только ее характером 12 В постоянного тока. Как вы это примените, зависит от вашего воображения и экспериментов. Например, я подумываю использовать эту схему для создания вибрационной платформы для перемешивания моей кислотной ванны для производства печатных плат …
Необходимые детали
Все детали были куплены на eBay.
- 1 керамический конденсатор 0,01 мкФ
- 1 керамический конденсатор 0,1 мкФ
- 2 выпрямительных диода 1N4001
- 1 выпрямительный диод 1N4004
- 1 x IRF530 100 В 14 A TO-200AB MOSFET 1 x TO-
- 220 радиатор
- 1 x 2-контактный винтовой зажим
- 1 x цилиндрический разъем постоянного тока (розетка)
- 1 резистор 100 Ом
- 1 резистор 1 кОм
- 1 тумблер SPDT
- 1 x NE555 таймер IC
- 1 x 8-контактное гнездо DIL
- 1 потенциометр 100 кОм
- 1 x 70 x 100 односторонняя печатная плата
- некоторый соединительный провод
Все это обошлось мне примерно в 2 доллара.90 AUD
Цепь управления скоростью двигателя PWM со схемой для двигателя постоянного тока
В этом руководстве по проекту мы создаем схему ШИМ-управления скоростью двигателя с использованием двух цифровых ИС. Мы опубликовали различные типы схем ШИМ, скажем, от базового ШИМ с использованием микросхемы NE 555 до значительно продвинутого ШИМ с использованием микроконтроллеров, таких как AVR , 8051 и платы Arduino .
ШИМ — это в основном широтно-импульсная модуляция, и если вы новичок в этом, просмотрите наши основные руководства — ШИМ-модуляция и другие статьи о ШИМ .
ОписаниеH Это простая схема ШИМ-контроллера скорости двигателя , которая может использоваться для изменения скорости маломощных двигателей постоянного тока. Изменение скорости достигается за счет изменения рабочего цикла импульса, подаваемого для привода двигателя. Из двух затворов IC CD40106B, N1 подключен как инвертирующий нестабильный мультивибратор триггера Шмитта для генерации импульсов, а N2 как инвертирующий буфер для управления транзистором во время положительных циклов на базе.Рабочий цикл устанавливается резистором R2. R1 ограничивает базовый ток транзистора SL 100. Схема идеальна для управления игрушечными двигателями, ручными мини-вентиляторами, небольшими вентиляторами и т. Д.
Схема цепи управления скоростью двигателя с ШИМ и списком деталей. Принципиальная схема управления скоростью двигателя с ШИМ Примечания.- Изменяя коэффициент заполнения R2, можно изменять от 0% до 100%.
- Для идентификации штырей SL 100 штифт, который соединен с корпусом, является коллектором, штифт рядом с выемкой — эмиттером, а оставшийся штифт — базой.
У нас есть другие схемы управления двигателем, которые вы можете прочитать, пожалуйста, посмотрите ниже:
1. Цепь ШИМ-регулятора скорости двигателя
2. Контроллер шагового двигателя
3. Вентилятор с регулируемой температурой
4. Двунаправленный двигатель
5. Цепь драйвера шагового двигателя
12V-24V PWM Схема контроллера двигателя с использованием TL494-IRF1405
Если вы ищете высококачественные схемы контроллера двигателя 24V PWM.У нас есть для вас много схем. Но сегодня я вам покажу. Возможно, вам лучше использовать TL494 и IRF1405.
Почему он особенный. Представьте, что в схеме есть система проверки низковольтной батареи, работающая с плавным пуском, регулирующая частоту импульсов и использующая батарею 12 В или 24 В при токе до 20 А.
А он маленький и простой. Не нужно программировать программное обеспечение (без микроконтроллера).
Он использует TL494, HEXFET и LM2940 в качестве основных.
Есть 3 цепи ниже!
ШИМ-схема управления скоростью двигателя постоянного тока 12 В с использованием TL494
Это схема ШИМ управления скоростью двигателя постоянного тока 12 В.Которая с использованием TL494 (ИС управления широтно-импульсной модуляцией в импульсном режиме) является основой для управления двигателем постоянного тока с помощью импульса.
Подробная информация:
— Для двигателя с регулировкой скорости 12 В, 150 Вт, макс. 15 А.
— R6 регулирует скорость двигателя.
— Драйвер двигателя от Mosfet IRFZ48.x 2шт.
— Управление на частоте 100 Гц
— Регулировка рабочего цикла ШИМ от 0 до 100%
— Время нарастания и спада = 10 мкс
— Имеется ток перегрузки 15 А или ограничение тока с протекающим током, бросок R11 и Q1 работают для остановки IC1
12 В -24V PWM Схема контроллера двигателя с использованием TL494 и IRF1405
Работа схемы
Рис: 1 Принципиальная схема этого проекта.
Характеристики проекта
— Диапазон питания: от 12 В до 30 В
— Потребляемый ток: максимум при 20 А
— Токовый выход: максимум при 20 А
— Ток в режиме ожидания: 20 мА
— Контроллер двигателя: от 0 до 100%
— Отключение Работа при более низком напряжении батареи: как настройка 11,5 В для 12 В и 23 В для батареи 24 В.
— Регулировка частоты импульсов: от 100 Гц до 1,1 кГц (от 129 Гц до 1,28 кГц в этом проекте)
— Плавный запуск: от 0 до 100% в диапазоне менее 1 секунды
Нарастающий и спадающий фронт импульса на затворе МОП-транзистор: 1.5uS и 1.6uS
-VR1: с регулируемой скоростью
-VR4: Защита от низкого напряжения на выходе
-VR3-регулировка частотно-импульсного выхода
-VR2-sub контроллер скорости
Рис. 2 Схема медной печатной платы
Рис: Схема 3-х компонентов этого проекта.
Примечание:
Мой друг прислал мне эту схему. Он сказал, что это очень хороший контроллер двигателя постоянного тока с высоким током. Но это полная статья, а не четкое фото.
Детали, которые вам понадобятся
- IC1: TL494, широтно-импульсная модуляция (ШИМ)
- REG1: LM2940CT-12, регулятор
- Q1, Q2: IRF1405, N-канальный полевой МОП-транзистор
- Q3: BC327, 45 В
- Q4: 2N5484, N-канальный полевой транзистор
- D1: MBR20100CT, высокочастотный диод
- D2-D6: 1N4148, 75 В 0.15A Диоды
- ZD1, ZD2: 1N4744, стабилитрон
Конденсаторы
- C5: 22 мкФ 16 В, электролитический
- C3, C6, C7, C10: 10 мкФ 16 В, электролитический C
- C1: 470 нФ 63 В, полиэстер
- C2, C8: 100 нФ 63 В, полиэстер
- C9: 56 нФ 63 В, полиэстер
0,25 Вт Допуск резисторов: 1%
- R1, R4, R10: 100 K , R5: 10K
- R6, R7: 2,2K
- R2: 1K
- R8, R9: 47 Ом
- VR1: 10K Подстроечный резистор
- VR2: Подстроечный резистор 10K
- VR3, VR4: 100K Подстроечный резистор 9016 Потенциометр
- Другие детали, печатная плата, радиатор и многое другое.
Управление двигателем 24 В с защитой от короткого замыкания 20 А
Это контроллер двигателя 24 В постоянного тока с током 20 Ампер. По нему используется управление IC SG3526B в символьном ШИМ, которое получает очень много и приводной двигатель с мощностью Mosfet номер IRFP7410 x 2 шт. Затем можно применить к двигателю постоянного тока при использовании 20 ампер, удобнее и по-прежнему иметь схему защиты от выстрела. Вы видите, как детализация добавляется на изображенной схеме.
Вращение скорости ШИМ вперед-назад и рекуперативное торможение
Это цепь вращения двигателя постоянного тока скорости ШИМ.Он может работать в прямом и обратном направлении и с функцией рекуперативного торможения. По этой схеме используется сигнал ШИМ управления скоростью двигателя постоянного тока 12 В с силовым полевым МОП-транзистором IRF150.
Реле RY1 использует управление реверсом с цифровой сигнализацией, изменением, Q10. Реле RY2 работает как функциональный тормозной резистор. С помощью управления Запуск или остановка с помощью цифрового сигнала тревоги с помощью. F1, используйте защиту через цепь.
D1 используется для защиты обратного тока от двигателя постоянного тока. Детали другие, пожалуйста, смотрите в схеме.
ПОЛУЧИТЬ ОБНОВЛЕНИЕ ПО ЭЛЕКТРОННОЙ ПОЧТЕ
Я всегда стараюсь сделать Electronics Learning Easy .
Сделай сам самодельный контроллер импульсов мощности
В этом устройстве используется встроенная схема генератора сигналов с широтно-импульсной модуляцией для запуска силового полевого МОП-транзистора.
Схема отлично подходит для управления мощностью, подаваемой на такие устройства, как вентилятор, светодиоды или даже трансформаторы и катушки. Регулируя ширину импульса, вы можете легко управлять скоростью вентилятора без ущерба для крутящего момента.
Используемый транзистор не критичен, но обычно следует использовать что-то с номинальными значениями напряжения и тока, подходящими для вашего приложения.У нас есть ряд доступных полевых МОП-транзисторов и IGBT. Схема будет работать от источника постоянного тока 6–12 В, а выход может быть выполнен в виде «открытого коллектора» для переключения более высокого напряжения.
Не хотите собрать эту схему DIY PWM самостоятельно? Ознакомьтесь с нашим ассортиментом передовых генераторов импульсов
На этой принципиальной схеме для простоты показана нагрузка (катушка, двигатель и т. Д.), Подключенная к тому же источнику питания, что и остальная часть схемы. Если вам нужно переключить более высокое напряжение, положительный разъем нагрузки можно просто подключить к внешнему источнику питания.
Если цепь будет использоваться с индуктивными нагрузками, к нагрузке следует подключить небольшой конденсатор. Они часто уже установлены на небольших двигателях постоянного тока. Дополнительный компонент, такой как варистор или «диод свободного хода», также рекомендуется, если генератор импульсов управляет высоковольтными трансформаторами обратного хода, такими как катушки зажигания.
Два потенциометра VR1 и VR2 используются для управления частотой и рабочим циклом выхода. VR1 регулирует скорость, с которой C1 заряжается для изменения частоты, в то время как VR2 действует как делитель потенциала, позволяя подавать определенное напряжение на инвертирующий вход IC2.Это напряжение используется для управления шириной импульса на выходе. Выходной рабочий цикл или ширина импульса устройства также могут контролироваться внешним напряжением, таким как микроконтроллеры или аналоговый сигнал. Источник аналогового напряжения можно просто подключить к инвертирующему входу вместо выхода VR2.
Характеристики и характеристики
- Вход от 9 до 15 В, 10 А
- Выходная мощность — от 9 до 15 В постоянного тока, прямоугольная форма
- Выход с открытым коллектором позволяет использовать отдельный источник напряжения для импульсов.
- Независимые регуляторы частоты и ширины импульса / рабочего цикла
- Частота регулируется в диапазоне от 0 Гц до 125 кГц (C1 необходимо изменить для полного диапазона)
- Ширина импульса полностью регулируется от 0% до 100%
У нас есть несколько таких генераторов импульсов, предназначенных для использования с трансформаторами высокого напряжения, которые доступны на странице киберсхем. Они высокого качества, готовые к монтажу на печатной плате, включая большой радиатор и вентилятор, защиту от перегрузки и противоэдс.индуктивная защита. Эти устройства довольно эластичны и идеально подходят для любителей и экспериментов из-за широкого спектра потенциальных применений и долговечности для работы с различными грузами. Если у вас есть случайные трансформаторы или вы делаете свои собственные катушки, эти импульсные модуляторы мощности идеально подходят для тестирования и управления ими.
Не хочешь собрать самому? Ознакомьтесь с нашими передовыми схемами импульсного управления. Купите наш замечательный PWM-OCXI прямо сейчас!
Что такое ШИМ-управление двигателем — 4QD
Что такое широтно-импульсная модуляция? как работает ШИМ-управление двигателем и как выглядит схема ШИМ? На этой странице мы подробно рассмотрим теорию и практику ШИМ-управления двигателем.
Принципы
Для управления скоростью постоянного тока двигателю нам понадобится переменное напряжение постоянного тока. источник питания. Однако, если вы возьмете двигатель 12 В и включите питание, двигатель начнет ускоряться: двигатели не реагируют немедленно, поэтому для достижения полной скорости потребуется небольшое время. Если мы отключим питание до того, как двигатель достигнет полной скорости, он начнет замедляться. Если мы включим и выключим питание достаточно быстро, двигатель будет работать с некоторой скоростью между нулевой и полной скоростью.Это именно то, что p.w.m. контроллер делает: он включает двигатель серией импульсов. Для управления скоростью двигателя он изменяет (модулирует) ширину импульсов — отсюда и широтно-импульсная модуляция.
Рассмотрим сигнал выше. Если двигатель соединен одним концом с плюсом батареи, а другим концом с минусом батареи через переключатель (полевой МОП-транзистор, силовой транзистор или аналогичный), то, если полевой МОП-транзистор включен на короткий период и выключен на длительное время, как в A выше, двигатель будет вращаться только медленно.В точке B переключатель находится в положении 50%, а выключении — 50%. В точке C двигатель работает большую часть времени и выключен только на короткое время, поэтому скорость близка к максимальной. В практическом контроллере низкого напряжения переключатель открывается и закрывается с частотой 20 кГц (20 тысяч раз в секунду). Это слишком быстро для бедного старого двигателя, чтобы даже понять, что он включается и выключается: он думает, что питается от чистого постоянного тока. Напряжение. Это также частота выше слышимого диапазона, поэтому любой шум, издаваемый двигателем, будет неслышным. Он также достаточно медленный, чтобы полевые МОП-транзисторы могли легко переключаться на этой частоте.Однако у двигателя есть индуктивность. Индуктивность не любит изменений тока. Если двигатель потребляет какой-либо ток, то этот ток течет через переключающий MOSFET, когда он включен — но куда он будет течь, когда MOSFET выключится? Читайте и узнайте!A Схема управления двигателем с ШИМ
Схема управления двигателем с ШИМРассмотрим схему, приведенную выше: на ней показаны полевой МОП-транзистор привода и двигатель. Когда ведущий полевой МОП-транзистор проводит ток, ток течет от положительного полюса батареи, через двигатель и полевой МОП-транзистор (стрелка A) и обратно к отрицательному полюсу батареи.Когда полевой МОП-транзистор отключается, ток двигателя продолжает течь из-за его индуктивности. К двигателю подключен второй полевой МОП-транзистор: полевые МОП-транзисторы действуют как диоды для обратного тока, а это обратный ток, проходящий через полевой МОП-транзистор, поэтому он проводит. Вы можете использовать такой полевой МОП-транзистор (закоротить его затвор до источника) или использовать силовой диод. Однако не так широко понятный факт о полевых МОП-транзисторах заключается в том, что, когда они включены, они проводят ток в любом направлении. Проводящий МОП-транзистор является резистивным по отношению к току в любом направлении, а на МОП-транзисторе с проводящей мощностью на самом деле падает меньше напряжения, чем на прямом смещенном диоде, поэтому МОП-транзистор требует меньше теплоотвода и расходует меньше энергии батареи.
Из приведенного выше вы должны увидеть, что если приводной полевой МОП-транзистор включен в течение 50% рабочего цикла, напряжение двигателя составляет 50% напряжения батареи, и, поскольку ток батареи протекает только при включенном полевом МОП-транзисторе, ток батареи течет только в течение 50% времени, поэтому средний ток батареи составляет только 50% тока двигателя!
Главный конденсатор
Однако существует проблема: когда полевой МОП-транзистор выключается, он не только прерывает ток двигателя, но также прерывает ток, текущий от батареи.Провода от батареи имеют индуктивность (как и батарея), поэтому, когда этот ток прерывается, эта индуктивность вызывает всплеск напряжения: в цепи основной конденсатор поглощает (большую часть) этот всплеск. Когда приводной полевой МОП-транзистор снова включается, аккумуляторный ток должен течь быстро, чего он не может. Главный конденсатор подает ток во время восстановления тока батареи. В контроллере, способном выдавать 120 ампер, этот конденсатор работает очень тяжело, и, если большой ток потребляется слишком долго (в зависимости от длины провода батареи), главный конденсатор может взорваться! На ранних этапах разработки мы когда-то использовали стандартные конденсаторы с проволочным концом и расплавляли провода конденсатора! Конденсаторы имеют провода с медным покрытием , сталь , и в системах управления двигателями эти провода могут сильно нагреваться!
Из вышеизложенного будет очевидно, что работа этого конденсатора в значительной степени зависит от индуктивности контура проводов батареи.Длинные провода будут иметь высокую индуктивность. Скручивание проводов аккумулятора снижает их индуктивность.
Сопротивление выводов батареи будет иметь эффект, аналогичный индуктивности, поэтому эти провода должны быть толстыми.
Также некоторые люди хотят вставить амперметр в провода аккумулятора. Следует противостоять искушению: в частности, простые автомобильные амперметры обладают высокой индуктивностью.
Простые контроллеры (например, используемые для моторизованных сумок для гольфа) обычно не имеют дорогостоящего главного конденсатора и зависят от емкости батареи.Вам это сойдет с рук — наши ранние Eagle и Egret — такие контроллеры. Однако краткое объяснение эффектов необходимо. Чтобы проиллюстрировать это, представлен график напряжения батареи, который можно увидеть с помощью осциллографа, подключенного непосредственно к источнику питания батареи на клеммах контроллера. Заземление осциллографа находится на отрицательной шине.
Вверху — положительный полюс аккумулятора, вид сверху, внизу — отрицательный полюс двигателя (который переключается контроллером).Осциллограммы были сильно очищены, чтобы наглядно показать: на практике на осциллограмме много «грязного» звона. Показано напряжение питания 12 В.Мы соединяем кривую в точке, где нет тока батареи: выход двигателя высокий, и ток повторно циркулирует в маховике. В точке A включается полевой МОП-транзистор привода контроллера, отвлекая ток двигателя от батареи. Но выводы батареи имеют индуктивность! Ток батареи не может начаться немедленно, поэтому провода батареи упадут до 12 В, и напряжение контроллера гаснет до тех пор, пока индуктивность свинца не сможет зарядиться, что происходит в пункте B.Время A-B зависит от тока и индуктивности контура батареи и может составлять значительную часть времени цикла!
Затем, в точке C, нижний полевой МОП-транзистор резко выключается, прерывая ток. Ток двигателя не проблема, он продолжает течь, и устройство маховика должно быть здесь, чтобы убедиться в этом! Но вы не можете внезапно остановить ток батареи — поэтому он выступает в виде большого скачка напряжения. Этот всплеск нарастает до тех пор, пока что-то не сработает: в этом случае он достигает напряжения лавинного пробоя полевого МОП-транзистора, и полевой МОП-транзистор сжимает его.Вы можете легко увидеть напряжение зажима с плоской вершиной с помощью осциллографа. МОП-транзисторы рассчитаны на повторяющуюся энергию лавины, и вы должны быть уверены, что 1 / 2Li², хранящаяся в индуктивности контура батареи, намного ниже безопасной повторяемой энергии лавины.
Это проблема: вычислить индуктивность контура батареи практически невозможно — даже для инженера. Игроку это сделать — ну, сложно. Таким образом, производитель просто поставляет контроллеры известной группе клиентов, которые используют их стандартными способами, и решает проблемы по мере их возникновения на эмпирической основе.Это всегда вопрос нетехнического заказчика, пытающегося получить что-то даром: нужен главный конденсатор. Для некоторых приложений вы действительно можете обойтись без! Но это определенно «сходит с рук»!
В контроллерах с главным конденсатором большая часть (но не все) нарушения питания сглаживаются конденсатором. Тем не менее, вы увидите положительный выброс и звон при прерывании тока батареи.
ШИМ и нагрев двигателя
Популярная «сказка старой жены» заключается в том, что ШИМ заставляет двигатель нагреваться больше, чем чистый d.c. Как и большинство старых женских сказок, это исходит из частичной правды, взращенной непониманием. «Миф» возникает из-за того, что, если частота слишком низка на , ток будет прерывистым (или, по крайней мере, переменным в зависимости от формы сигнала ШИМ), потому что индуктивность двигателя не может поддерживать ток должным образом во время периода выключения формы волны. Таким образом, ток двигателя будет импульсным, а не непрерывным. Средний ток будет определять крутящий момент, но нагрев будет интегралом от квадрата тока (нагрев пропорционален I²R) — «коэффициент формы» тока будет больше единицы.Чем ниже частота, тем выше ток пульсации и сильнее нагрев.
Рассмотрим упрощенный случай, когда ток либо включен, либо выключен. Если ток протекает, скажем, 1/3 времени, и вам требуется крутящий момент от двигателя, эквивалентный крутящему моменту, обеспечиваемому непрерывным током в 1 ампер, то вам явно понадобится средний ток 1 ампер. Для этого при рабочем цикле 33% у вас должно быть 3 ампера (ток течет в течение 1/3 времени).
Теперь ток в 3 ампера даст в 9 раз (я в квадрате) нагревательный эффект, равный 1 амперам непрерывного действия.
Но если 3 ампера протекают только 1/3 от общего времени — значит, нагрев в двигателе в 9 раз за 1/3 времени — или в 3 раза больше, чем устойчивый 1 ампер! Считается, что этот сигнал имеет «форм-фактор» 3.
Однако — если частота повторения импульсов достаточно высока, индуктивность двигателя вызовет эффект маховика, и ток станет стабильным. Например, двигатель Lynch имеет индуктивность всего 39 микрогенри (это один из известных мне двигателей с самой низкой индуктивностью) и сопротивление 0.016 Ом. «Постоянная времени» для цепи L-R равна L / R, что (для двигателя Lynch) дает 2,4 мс. Для SEM DPM40P4 (1 кВт) индуктивность составляет 200 микрогенри, а сопротивление 40 миллиом, что дает постоянную времени 5 мсек.
Как показывает практика и чтобы избежать излишних математических вычислений, период повторения импульсов должен быть значительно короче постоянной времени двигателя.
Другими факторами, влияющими на PRF, являются:
Если он находится в звуковом диапазоне, двигатель может издавать вой (вызванный явлением, известным как «магнитострикция», поэтому держитесь выше звукового диапазона.
Схема MOSFET рассеивает больше всего при переключении из одного состояния в другое, поэтому частота не должна быть слишком высокой — MOSFET можно использовать с осторожностью до 100 кГц, но это становится немного выше.
RF-излучения: они увеличиваются с увеличением частоты, поэтому сохраняйте частоту как можно ниже!
Очевидно, что трудно выбрать «лучший» компромисс между ними, но оптимальная частота, по-видимому, составляет около 20 кГц.
На нашем дочернем сайте 4qdtec есть более подробная версия этой страницы вместе с гораздо более подробной технической информацией.