
устройство, принцип работы, виды, способы пуска
Способы пуска и схемы подключения
Асинхронный электродвигатель с короткозамкнутым ротором обладает низкой себестоимостью, большими пусковыми токами и низким усилием на старте. Поэтому для различных целей могут применять различные способы пуска, снижающие бросок тока в обмотках и улучшающие рабочие характеристики:
- прямой – напряжение на электродвигатель подается через пускатели или контакторы;
- переключение схемы соединения обмоток электродвигателя со звезды на треугольник;
- понижение напряжения;
- плавный пуск;
- изменение частоты питающего напряжения.
Однофазного асинхронного двигателя.
Для асинхронного однофазного электродвигателя могут использоваться три основных способа пуска:
- С расщеплением полюсов – используется в электродвигателях особой конструкции, но недостатком методы является постоянная потеря мощности.

- С конденсаторным пуском – вводит пусковой конденсатор в момент запуска асинхронного двигателя и убирает его со схемы через несколько секунд после начала работы. Обладает максимальным вращательным моментом.
- С резисторным пуском электродвигателя – обеспечивает начальный сдвиг между векторами ЭДС обмоток для скольжения в асинхронной машине.
Трехфазного асинхронного двигателя.
Трехфазные асинхронные агрегаты могут подключаться такими способами:
- Напрямую в цепь через пускатель или контактор, что обеспечивает простоту процесса, но формирует максимальные токи. Этот способ не подходит в случае больших механических нагрузок на вал.
- Переключением схемы со звезды на треугольник – применяется для снижения токов в обмотках электродвигателя за счет уменьшения питающего напряжения с линейного на фазное.
- Путем подключения через преобразователь напряжения, реостаты или автотрансформатор для снижения разности потенциалов. Также используется изменение числа пар полюсов, частоты питающего напряжения и прочие.
 Также используется изменение числа пар полюсов, частоты питающего напряжения и прочие.
Также используется изменение числа пар полюсов, частоты питающего напряжения и прочие.Помимо этого трехфазные асинхронные двигатели могут использовать прямую и реверсивную схему включения в цепь. Первый вариант применяется только для вращения вала электродвигателя в одном направлении. В реверсивной схеме можно переключать движение рабочего органа в прямом и обратном направлении.
Рассмотрим нереверсивную схему пуска асинхронного электродвигателя (рисунок 9). Здесь, через трехполюсный автомат QF1 питание подается на пускатель KM1. При нажатии кнопки SB2 произойдет подача напряжения на обмотки электродвигателя, его остановка осуществляется кнопкой SB1. Тепловое реле KK1 применяется для контроля температуры нагрева, а лампочка HL1 сигнализирует о включенном состоянии контактора.
Рисунок 10: схема прямого включения с реверсом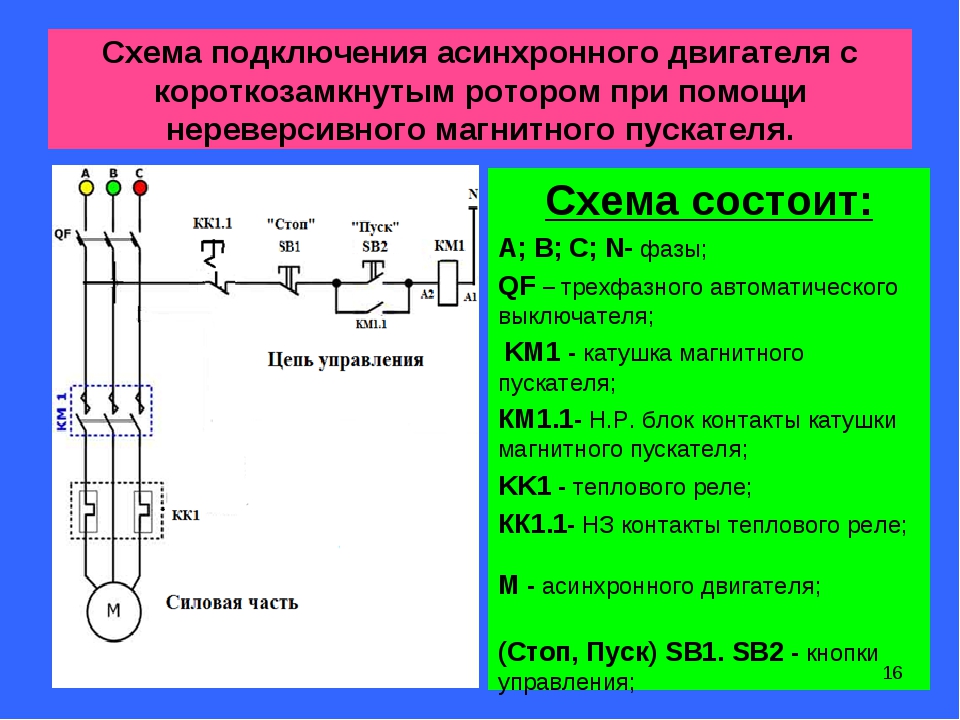 Прямое включение асинхронного электродвигателя производиться кнопкой SB2, а обратное SB3.
Прямое включение асинхронного электродвигателя производиться кнопкой SB2, а обратное SB3.1. Подключение асинхронного двигателя в однофазную сеть
Применение конденсаторов в асинхронных двигателях
рабочий | пусковой | |
применение | В схемах асинхронных электродвигателей | В схемах асинхронных электродвигателей |
тип подключения | Последовательно со вспомогательной обмоткой электродвигателя | Параллельно рабочему конденсатору |
в качестве | Является фазосмещающим элементом | Является фазосмещающим элементом |
назначение | Позволяет получить круговое вращающееся магнитное поле, необходимое для работы электродвигателя | Позволяет получить магнитное поле, необходимое для повышения пускового момента электродвигателя |
время включения | В процессе работы электродвигателя | В момент пуска электродвигателя |
Существуют две основные области применения конденсаторов для асинхронных электродвигателей.
1) Трёхфазный асинхронный электродвигатель, включаемый через конденсатор в однофазную сеть
В случае, когда трехфазный электродвигатель необходимо подключить к однофазной сети, существует два возможных варианта подключения: «звезда» или «треугольник», причем наиболее предпочтительным во многих случаях является вариант «треугольник».
Приблизительный расчет для данного типа соединения производится по следующей формуле:
Сраб.=k*Iф/Uсети
где:
k – коэффициент, зависящий от соединения обмоток.
Для схемы соединения «Звезда» — k=2800
Для схемы соединения «Треугольник» — k=4800
Iф – номинальный фазный ток электродвигателя, А.
Uсети – напряжение однофазной сети, В.
Для определения пусковой емкости Сп.
Для получения пускового момента, близкого к номинальному, достаточно иметь пусковую емкость, определяемую соотношением Сп.=(2.5-3) Ср.
Рабочее напряжение конденсаторов должно быть в 1,5 раза выше напряжения сети.
Схема подключения
Рис 1. Схема включения в однофазную сеть трехфазного асинхронного двигателя с обмотками статора, соединенными по схеме «звезда» (а) или «треугольник» (б):
|
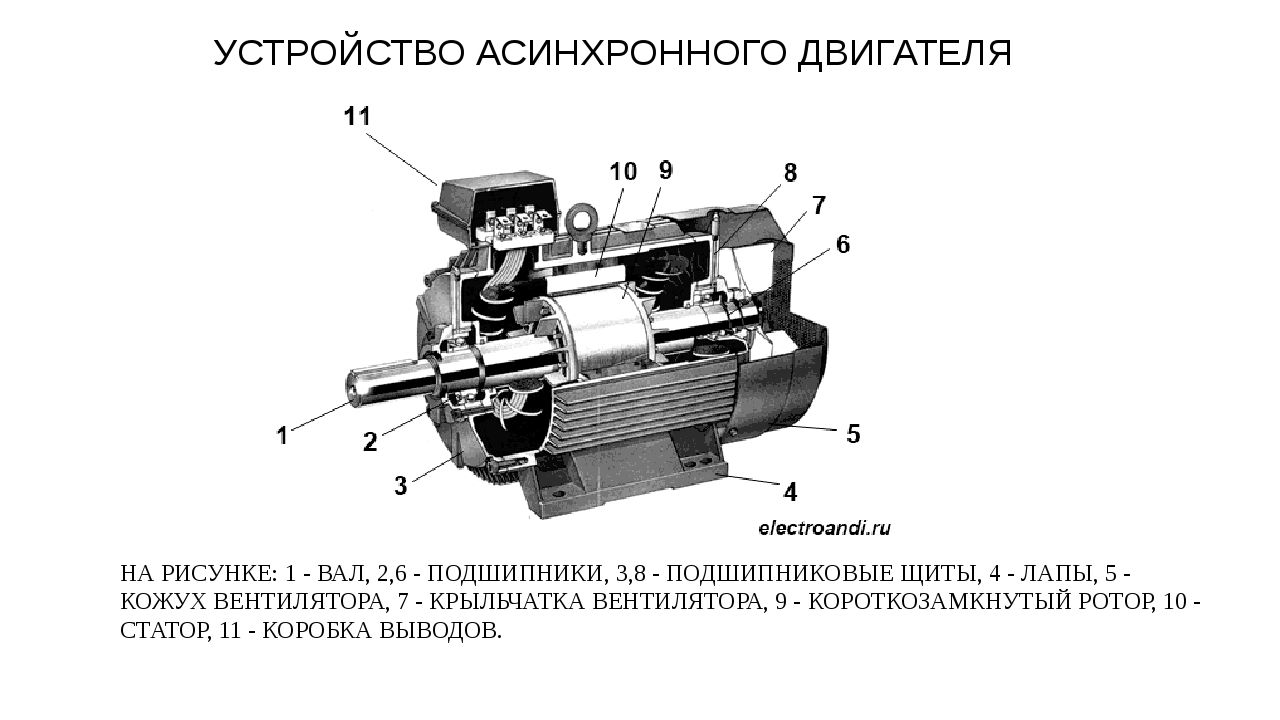
Схема подключения
| Рис 2.
|
 Схема (а) и векторная диаграмма конденсаторного асинхронного двигателя:
Схема (а) и векторная диаграмма конденсаторного асинхронного двигателя:
Конденсаторный асинхронный электродвигатель по пусковым и рабочим характеристикам близок к трехфазному асинхронному двигателю.
Схемы подключения многоскоростного трехфазного электродвигателя
Схема присоединения многоскоростного асинхронного электродвигателя с короткозамкнутым ротором
Схема присоединения многоскоростного асинхронного электродвигателя с короткозамкнутым ротором
Треугольник(или звезда)\\ двойная звезда —— Д/YY.
Низшая скорость — Д(треугольник(или звезда Y ): 750 об/мин
2U, 2V, 2W свободны, на 1U, 1V, 1W подается напряжение.
Высшая скорость — YY. 1500 об мин.
1U, 1V, 1W замкнуты между собой, на 2U, 2V, 2W подается напряжение
Двухскоростные двигатели имеют одну полюсопереключаемую обмотку с шестью выводными концами. Обмотка двигателей с соотношением частот вращения 1 : 2 выполняется по схеме Даландера и соединяется в треугольник Д (или в звезду Y) при низшей частоте вращения и в двойную звезду (YY) при высшей частоте вращения Схема соединения обмоток показана на рисунке.
Средняя скорость. 1000 об мин.
Обмотка на 1000 об мин подключается независимо от остальных своим пускателем, не участвующим в схеме Даландера.
Запуск двухскоростного двигателя с переключающимися полюсами без инверсии вращения для схемы Даландера.
Электрические характеристики элементов контроля и защиты необходимые для выполнения этого типа запуска, как минимум должны быть:
Контактор К1, для включения и выключения двигателя на маленькой скорости (PV). Мощность должна быть такой же либо превышать In двигателя в треугольном соединении и с категорией обслуживания АС3.
Мощность должна быть такой же либо превышать In двигателя в треугольном соединении и с категорией обслуживания АС3.
Контакторы К2 и К3, для включения и выключения двигателя на большой скорости (GV). Мощность этих контакторов должна быть такой же либо превышать In двигателя соединенного двойной звездой и категориеи обслуживания АС3.
Термореле F3 и F4, для защиты от перегрузок на обоих скоростях. Каждый из них будет измерять In, употребляемый двигателем на защищаемой скорости.
Предохранители F1 и F2, для защиты от К.З. должно быть типа аМ и мощностью такой же или превышающей максимальное In двигателя, в каждой из своих двух скоростей.
Предохранитель F5, для защиты цепей контроля.
Система кнопок, с простым прерывателем остановки S0 и двумя двойными прерывателями движения S1 и S2.
Перейдем к описанию в краткой форме процесса запуска, как на малой скорости, так и на большой:
а) запуск и остановка на маленькой скорости (PV).
Запуск путем нажатия на S1.
Замыкание контактора цепи К1 и запуск двигателя соединенного треугольником.
Автопитание через (К1, 13–14).
Открытие К1, которое действует как шторка для того, чтобы хотя запущен в движение S2, контакторы большой скорости К2 и К3 не были активизированы.
Остановка путем нажатия на S0.
б) запуск и остановка на большой скорости (GV).
Запуск путем нажатия на S2.
Замыкание контактора звезды К2, которое формирует звезду двигателя при коротком замыкании: U1, V1 и W1.
Замыкание контактора К3 (К2, 21–22) таким образом, что двигатель работает соединением в двойную звезду.
Автопитание через (К2, 13–14).
Открытие (К2, 21–22) и (К3, 21–22), которые действуют как шторки для того, чтобы никогда не закрывался К1 в то время, как закрыты К2 или К3.
Остановка путем нажатия на S0.
Вспомогательные контакты системы кнопок (S1 и S2, 21–22)действуют как защитные двойные шторки системы кнопок в том случае, если на оба прерывателя попытаются нажать одновременно, чтобы никакой из контакторов не активизировался и эти контакты можно было бы убрать в том случае, если есть защитные шторки механического типа между К1 и К2.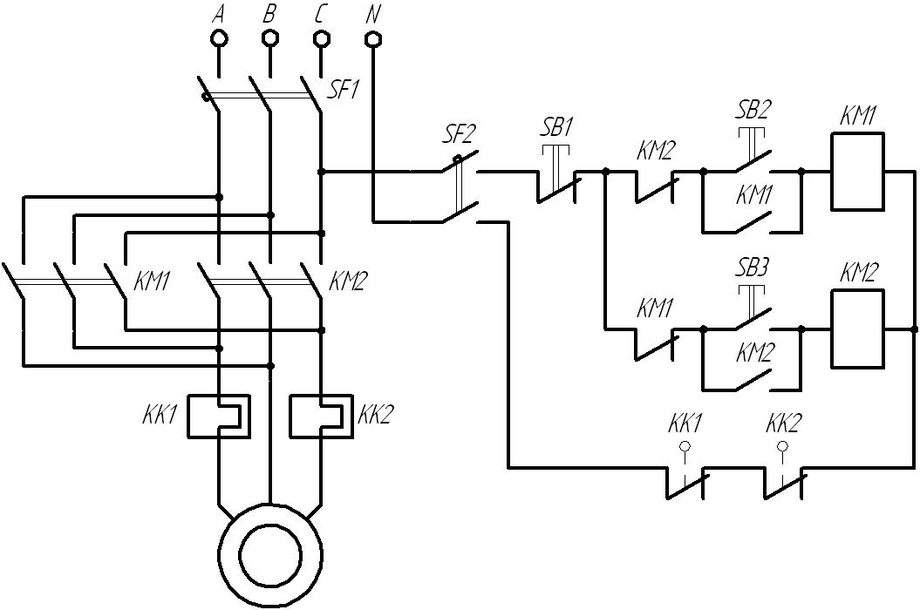
Устройство и схема трехфазного асинхронного двигателя
Высокий показатель КПД, обеспечение требований защиты и безопасности, потребление электроэнергии сравнительно с выходной мощностью составляет 40%: низковольтный двигатель асинхронный трехфазный в странах с развитыми отраслями промышленности востребован буквально при любом типе производства.
За счет использования статора и подвижного ротора создается электромагнитный момент с передачей вращения на приводимый механизм. Разницы скорости вращения магнитного поля ротора и статора обусловила название асинхронный трехфазный двигатель, для определения разницы используется термин «скольжение».
Продуманная система вентиляции, двухслойная обмотка с использованием нагревостойких материалов, стандартизированные установочные размеры с использованием фланцев, лап или одновременно оба крепления – низковольтные асинхронные двигатели характеризуются максимально высокими показателями безопасности и долговечности эксплуатации.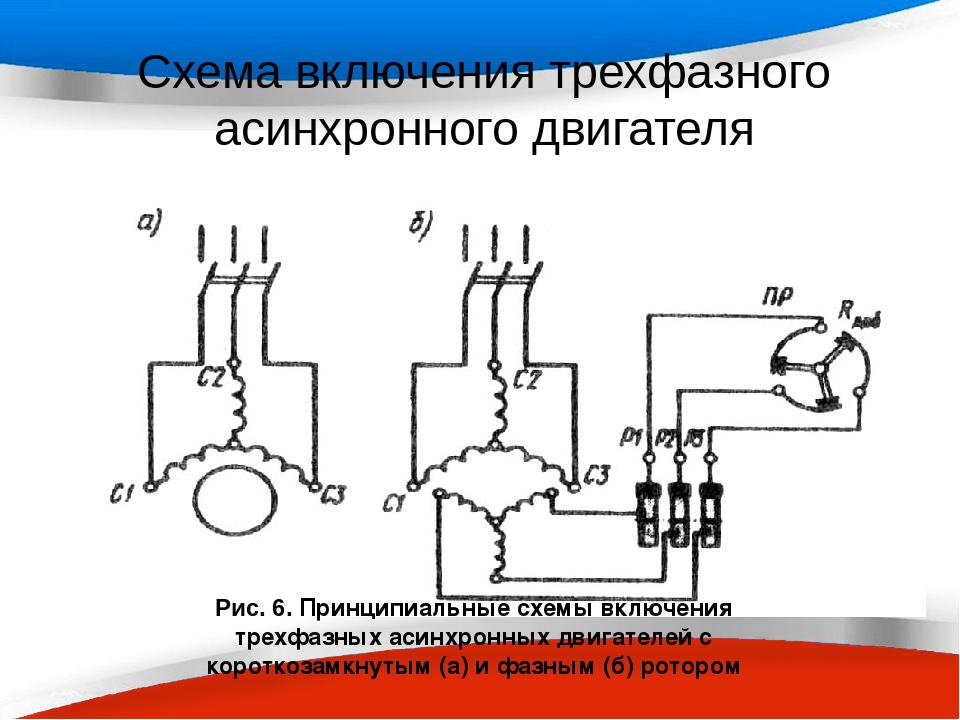
Двигатель асинхронный трехфазный имеет следующие конструктивные и опциональные возможности: установка температурных и вибрационных датчиков, возможно вращение в обе стороны – реверс, удобный монтаж. Схема трехфазного асинхронного двигателя может включать антиконденсатный обогрев – продуманная система охлаждения, отвода тепла, циркуляционный, принудительный вентилятор, охлаждение водяное или через ребра.
Материал ротора – медь или литой под давлением алюминий, корпус – чугун, при необходимости наносится дополнительная защита от коррозии.
Устройство трехфазного асинхронного двигателя с короткозамкнутым ротором
1 — вал | 8 — кожух вентилятора | |
2, 6 — подшипники | 9 — сердечник ротора с короткозамкнутой обмоткой | |
3, 7 — подшипниковые щиты | 10 — сердечник статора с обмоткой | |
4 — коробка выводов | 11 — корпус | |
5 — вентилятор | 12 — лапы |
Асинхронные двигатели – преимущества, сферы применения
Номинальная мощность двигателя – это фактически механическая мощность вала в рабочем режиме, согласно ГОСТ 12139 эти показатели варьируются от 0,06 до 400 кВт.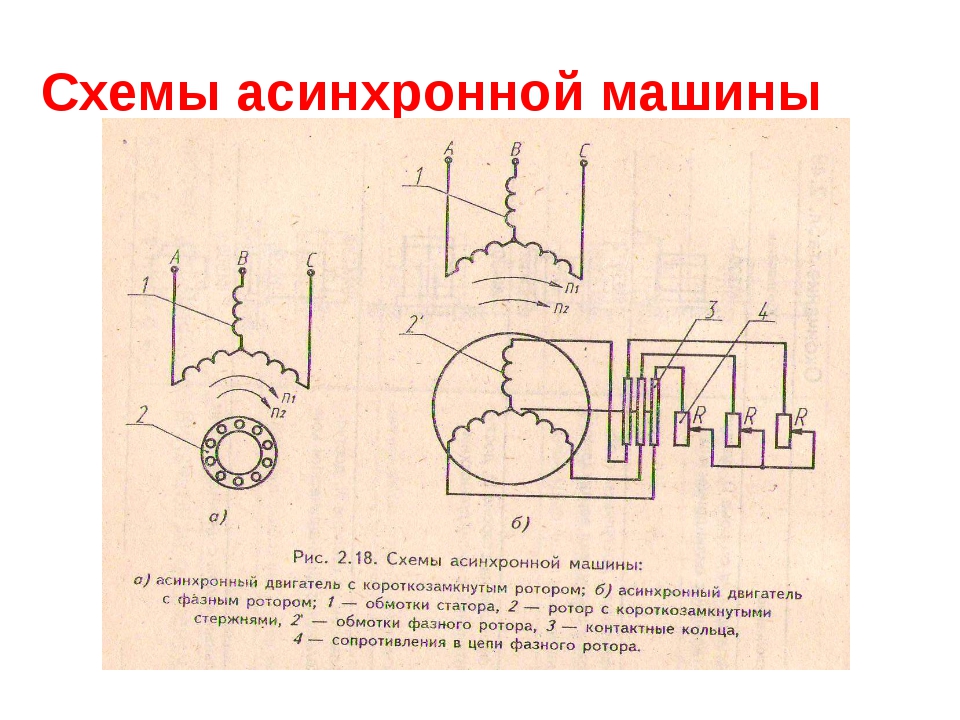 Синхронная частота вращения регламентируется ГОСТ 10683 – 73, её показатели: 500, 600, 750, 1500, 3000 об/минуту при частоте 50 Гц. Установочные размеры классифицируются согласно ГОСТ 4541 (устройство трехфазного асинхронного двигателя определяет конкретный вид установки)
Синхронная частота вращения регламентируется ГОСТ 10683 – 73, её показатели: 500, 600, 750, 1500, 3000 об/минуту при частоте 50 Гц. Установочные размеры классифицируются согласно ГОСТ 4541 (устройство трехфазного асинхронного двигателя определяет конкретный вид установки)
Полная реализация преимуществ использования асинхронных трехфазных двигателей зависит от правильного подбора устройства по характеристикам и использования защитных систем пуска. К примеру, тиристорные пусковые устройства (ТПУ) обеспечивают плавное нарастание тока, стабилизируют ток в условиях ограничений по мощности, при работе насосных систем исключают удар обратного клапана, так называемый, обратный «гидродинамический удар», и обеспечивают защиту двигателя при любых аварийных режимах работы сети.
Устройство трехфазного асинхронного двигателя подходит для дерева, металлообработки, производства строительных материалов, вентиляционных, насосных систем, котельного оборудования. Практически везде, где имеют место моторы с вращающимися частями, применение низковольтных асинхронных двигателей целесообразно с точки зрения надежности, безопасности, и выгодно с позиции экономии расходов на обслуживание и оплату электроэнергии.
Схема трехфазного асинхронного двигателя и устройство агрегата приведены выше.
Схема включения асинхронного электродвигателя — Дизайн мастер Fixmaster74.ru
Как подключить асинхронный двигатель
Асинхронный двигатель — это двигатель переменного тока, частота вращения ротора которого отличается от частоты вращения магнитного поля, которое создается током обмотки статора. Асинхронный двигатель преобразует электрическую энергию в механическую. Благодаря своей простоте устройства, надежности в эксплуатации двигатели такого типа являются самыми распространенными электрическими машинами в мире.
Фазные обмотки статора электродвигателя соединяются в звезду или треугольник (в зависимости от напряжения сети). Если в паспорте электродвигателя указано, что обмотки выполнены на напряжение 220/380 В, то при включении его в сеть с линейным напряжением 220 В обмотки соединяют в треугольник, а при включении в сеть 380 В — в звезду.
Схемы соединения обмоток статора трехфазного асинхронного двигателя: а — в звезду, б — в треугольник, в — в звезду и треугольник на клеммном щитке электродвигателя
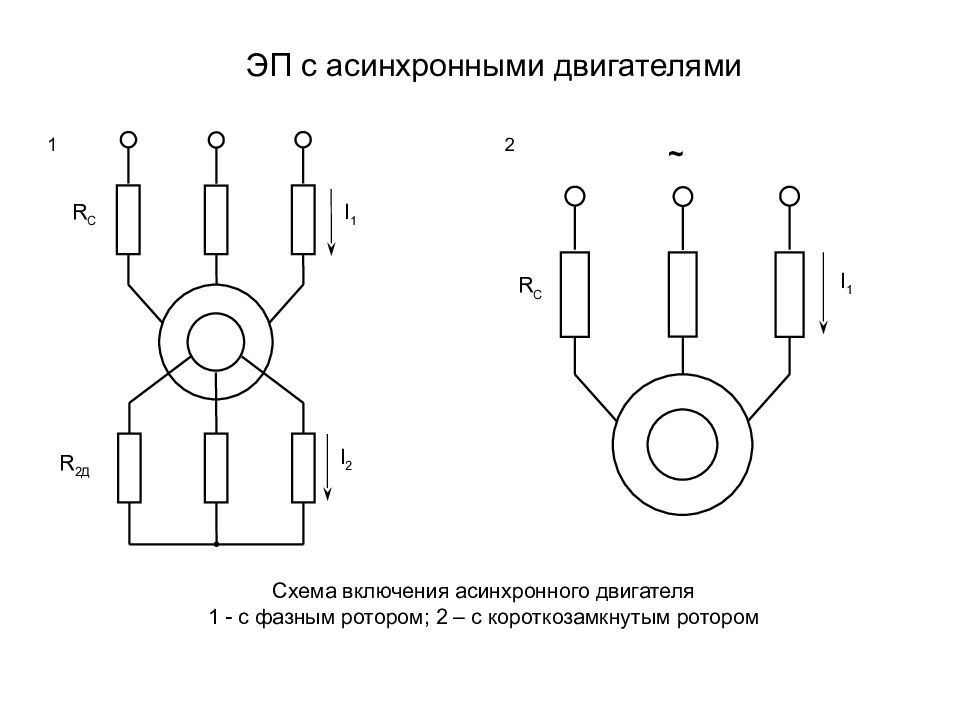
Схема включения асинхронного электродвигателя с фазным ротором: 1 — обмотка статора, 2 — обмотка ротора, 3 — контактные кольца, 4 — щетки, R — резисторы.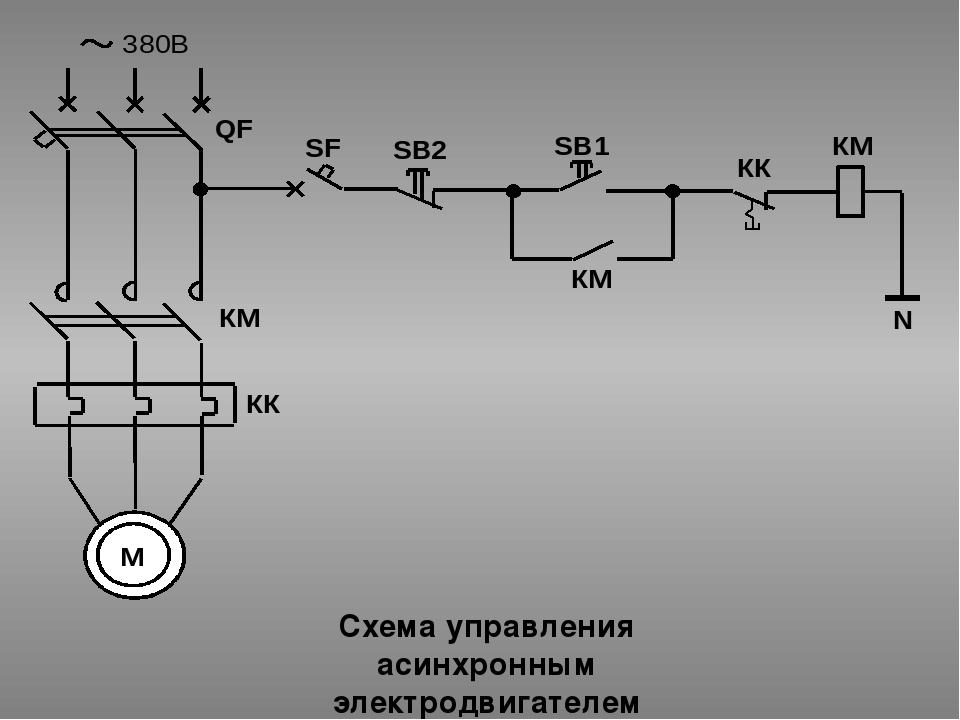
Для изменения направления вращения вала асинхронного двигателя необходимо изменить направление вращения магнитного поля статора. Для этого достаточно поменять местами два любых провода, соединяющих обмотку статора с питающей сетью.
Схема включения однофазных конденсаторных двигателей: а — с рабочей емкостью Ср, б — с рабочей емкостью Ср и пусковой емкостью Сп.
Как подключить асинхронный двигатель на 220В
Так как питающие напряжения у различных потребителей могут различаться друг от друга, возникает необходимость переподключения электрооборудования. Сделать подключение асинхронного двигателя на 220 вольт безопасным для дальнейшей работы оборудования достаточно просто, если следовать предложенной инструкции.
На самом деле это не является невыполнимой задачей. Если сказать коротко, то все, что нам нужно, это правильно подключить обмотки. Существует два основных типа асинхронных двигателей: трехфазные с обмоткой звезда – треугольник, и двигатели с пусковой обмоткой (однофазные).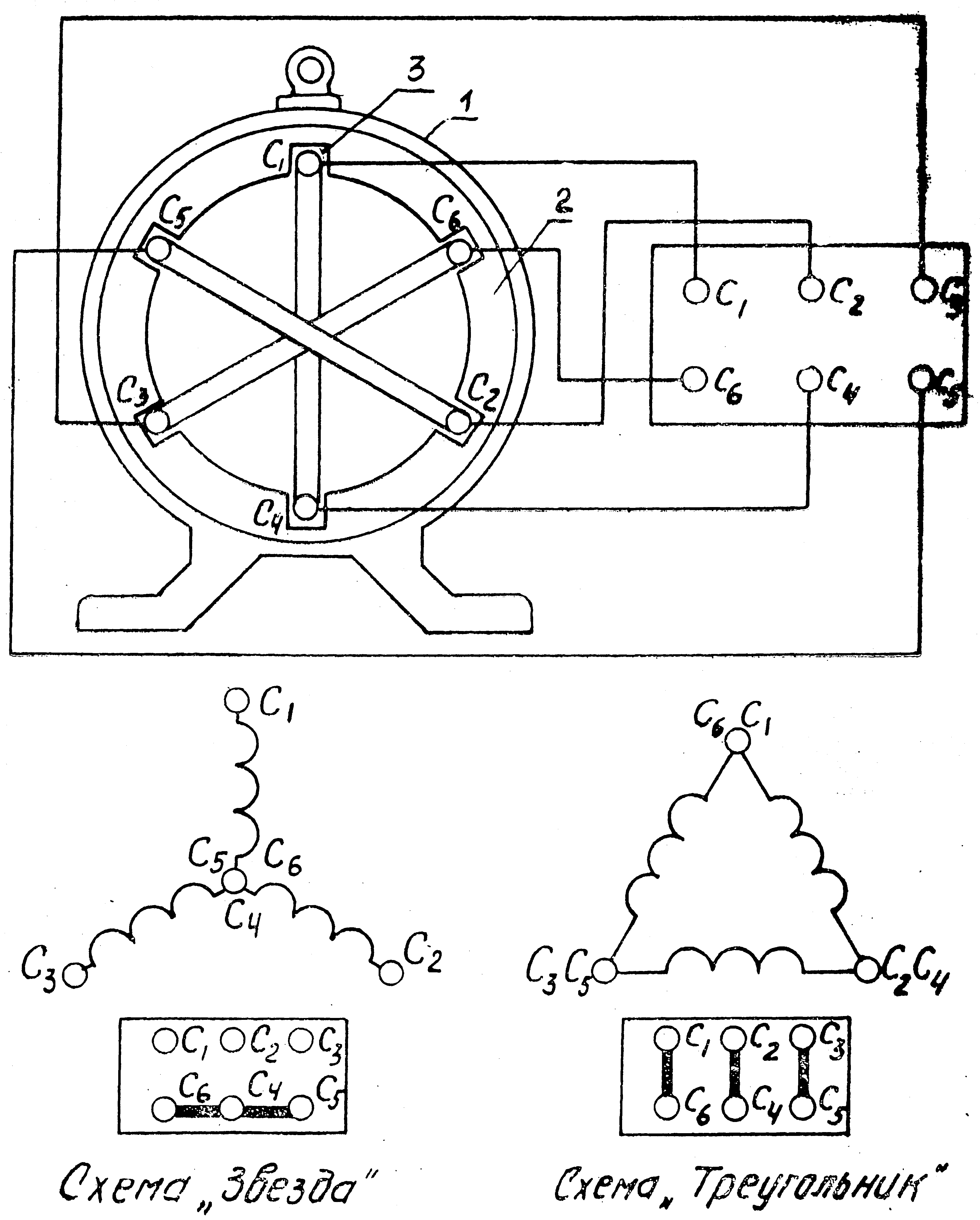 Последние используются, например, в стиральных машинах советской конструкции. Их модель АВЕ-071-4С. Рассмотрим каждый вариант по очереди.
Последние используются, например, в стиральных машинах советской конструкции. Их модель АВЕ-071-4С. Рассмотрим каждый вариант по очереди.
Такие электродвигатели применяются на производстве, так как трехфазное напряжение чаще всего используется именно там. И в некоторых случаях бывает, что вместо 380 в есть трехфазное 220. Как их включить в сеть, чтобы не спалить обмотки?
Подключение электродвигателя
Время на чтение:
В промышленности наибольшее распространение получили трехфазные асинхронные двигатели. Такие привода обладают массой достоинств, как, например, жесткая характеристика. Это выражается в том, что при увеличении нагрузки и снижении оборотов крутящий момент резко возрастает. Схема подключения трехфазного асинхронного двигателя имеет свои особенности, которые необходимо учитывать при монтаже и ремонте устройств.
Схема подключения трехфазного асинхронного двигателя имеет свои особенности, которые необходимо учитывать при монтаже и ремонте устройств.
Условия для подключения электродвигателя
Основным условием для нормальной работы трехфазных двигателей является стабильность напряжения и тока в каждой из фаз электрической сети. Обрыв хотя бы одной фазы приведет к тому, что двигатель потеряет значительную часть мощности и при нагрузке на валу свыше 50 % нормативной остановится и выйдет из строя. Пуск на двух фазах возможен только при полном отсутствии нагрузки и только в то время, когда ротор сохраняет хотя бы небольшую угловую скорость.
Асинхронный двигательК сведению! В момент пуска асинхронный двигатель потребляет ток, в 3-5 раз превышающий номинальный до тех пор, пока ротор не наберет определенные обороты. Это явление исходит из принципа работы двигателя.
Таким образом, если в рабочем режиме ток двигателя позволяет использовать обычные автоматические выключатели, то для обеспечения нормального пуска коммутацию следует производить через мощный контактор (магнитный пускатель).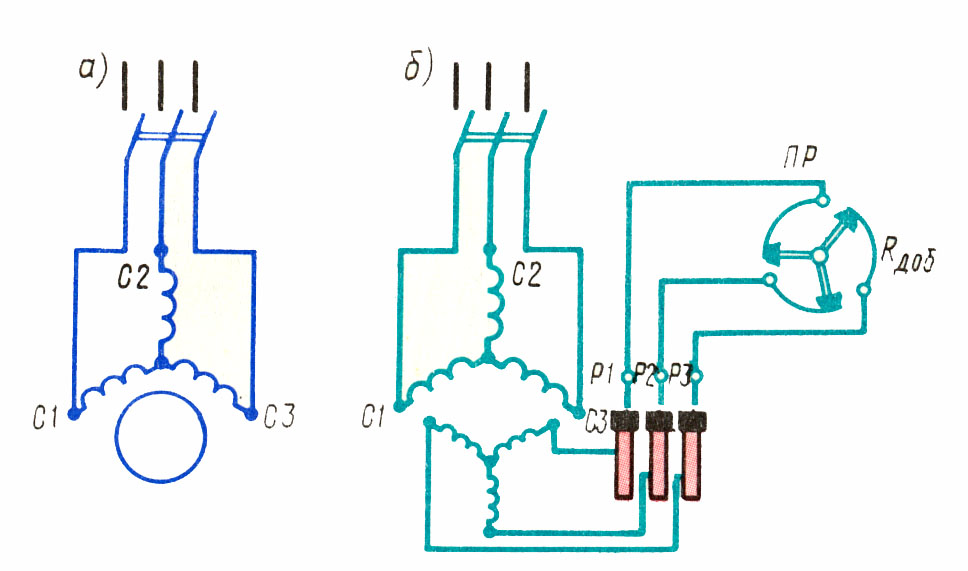
В отдельных случаях возможно подключение трехфазного двигателя в бытовую однофазную сеть. При этом сильно падают мощностные характеристики. Такая ситуация возникает очень часто, когда необходимо использовать промышленный привод в бытовых условиях. Используя специальную схему включения, обеспечивают нормальную работу мотора с учетом снижения мощности.
Как подготовить для подключения
Для правильного включения трехфазного двигателя необходимо помнить, что существует несколько схем соединения обмоток, среди которых:
- «Звезда». Одни концы обмотки соединяют вместе, а другими подключаются к фазным проводам сети;
- «Треугольник». Все три обмотки соединяются последовательно — конец каждой обмотки с началом следующей. Напряжение сети подается на точки соединения.
Обратите внимание! Для получения одинаковой мощности при соединении типа «звезда» требуется напряжение в √3 раз больше, чем при «треугольнике». Для двигателей, у которых допускается произвольное переключение обмоток, на шильдике обязательно указывается рабочее напряжение «220/380» или «127/220». Первое значение относится к соединению «треугольник», второе к «звезде».
Первое значение относится к соединению «треугольник», второе к «звезде».
В таких электродвигателях на клеммную колодку попарно в три ряда выведены начало и концы всех обмоток:
- начало первой обмотки — конец второй;
- начало второй — конец третьей;
- начало третьей — конец первой.
Для соединения «звезда» подключают один ряд из трех клемм двумя перемычками, а для соединения «треугольник» замыкают каждую пару тремя перемычками.
Как правильно подсоединить электродвигатель
От правильности включения обмоток электродвигателя зависит как ток потребления, так и направление вращения. Ток потребления вырастает, если двигатель, у которого на данное напряжение сети обмотки должны быть соединены «звездой», переключить на «треугольник». Такой режим работы является аварийным и приведет к выходу из строя.
Из теории трехфазного тока известно, что направление вращения электрической машины можно изменить, поменяв любые две фазы из трех местами. На этом основана схема реверсирования трехфазных асинхронных электродвигателей.
На этом основана схема реверсирования трехфазных асинхронных электродвигателей.
Важно! Схема реверсирования должна обеспечивать невозможность переключения фаз до момента остановки двигателя (прекращения подачи питания). В противном случае произойдет короткое замыкание сети.
Как подключить с 3 или 6 проводами
В большинстве случаев соединение двигателя с питающей сетью производится при помощи трех проводов. Даже если на клеммную колодку выведено шесть проводов, что соответствует трем парам обмотки, то путем соединения в нужную схему для подключения к питанию используется три провода.
Для мощных устройств учитывается, что асинхронный двигатель в момент запуска потребляет в несколько раз больший ток, поэтому используется сложная схема запуска, в которой в момент пуска обмотки подключаются «звездой», а после того как ротор наберет необходимые минимальные обороты, обмотки переключаются в «треугольник».
Шестипроводная схема включенияВажно! Для таких схем включения нужно подсоединять все шесть проводов обмоток электрической машины.
Схема подключения асинхронного электродвигателя
Асинхронные двигатели бывают не только трехфазные. Разработаны конструкции, которые могут подключаться в бытовую однофазную сеть. Схема электродвигателя для подключения к однофазной сети состоит из двух обмоток — рабочей и пусковой. Пусковая обмотка предназначена для формирования внутри статора вращающегося магнитного сдвига в момент пуска. Это необходимо для обеспечения начала вращения ротора. Фазный сдвиг осуществляется за счет включения пусковой обмотки через конденсатор.
Подключение однофазного двигателяПосле того как ротор наберет обороты, пусковая обмотка уже не нужна. Маломощный однофазный привод будет работать нормально в таком режиме, но мощность двигателя возрастет, если оставить в работе пусковую обмотку, включенную через рабочий конденсатор.
Обратите внимание! Емкость рабочего конденсатора меньше, чем у пускового, так как нет необходимости сильного сдвига фазы. При высокой емкости через пусковую обмотку будет проходить большой ток, что приведет к ее перегреву.![]()
В трехфазную электрическую сеть электромоторы включаются согласно их характеристикам и напряжению сети. Здесь главное — правильно выполнить необходимые соединения обмоток в соответствии с напряжением питания.
Нестандартная схема подключения трехфазного асинхронного электродвигателя применяется при использовании промышленных устройств в быту.
Подсоединение производят по нескольким вариантам:
- с использованием частотного преобразователя;
- через конденсатор.
Электронный частотный преобразователь (инвертор) позволяет не только сохранить мощность, но и улучшить целый ряд характеристик, недостижимых при включении по стандартной схеме. Это:
- Плавный пуск.
- Регулирование мощности.
- Регулирование оборотов.
Частотный преобразователь преобразует однофазное питание в полноценную трехфазную сеть, в которой можно менять частоту, амплитуду, выполнять стабилизацию тока и напряжения в фазных проводах.
Обратите внимание! Большой недостаток частотных инверторов — их высокая стоимость.
Схема с конденсатором разработана таким образом, чтобы получить на одной из трех обмоток сдвиг фазы, достаточный для работы двигателя. Конденсаторная электросхема работоспособна как для «треугольника», так и для «звезды». Включение электромотора через конденсатор является наиболее простым решением проблемы, но имеет несколько недостатков:
- максимальная мощность двигателя снижается до 50 %;
- емкость фазосдвигающего конденсатора сильно зависит от нагрузки на электродвигатель.
То есть при работе на холостом ходу емкость должна быть минимальна и достигать максимума на полной мощности двигателя. Наиболее высокий ток потребления у асинхронного двигателя в момент запуска.
Подключение в однофазную сетьОбратите внимание! На практике используют усредненное значение емкости для наиболее ожидаемого режима работы, поскольку малое значение не даст необходимую мощность, а высокое приведет к перегреву обмоток.
Правильный расчет емкости учитывает напряжение сети, схему включения обмоток и мощность двигателя.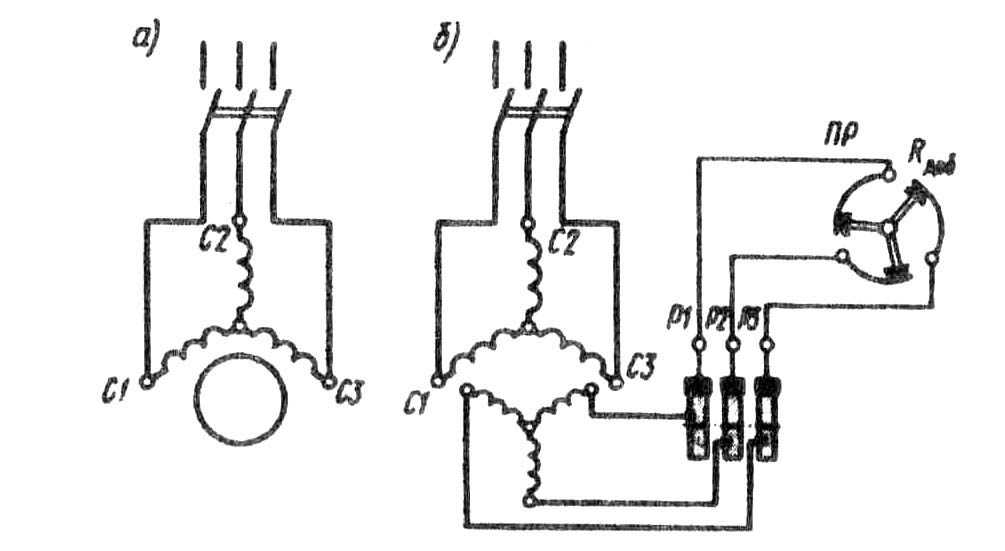 Конденсаторная схема включения должна предусматривать запуск двигателя через отдельный пусковой конденсатор, емкость которого должна быть выше рабочей в 2-3 раза.
Конденсаторная схема включения должна предусматривать запуск двигателя через отдельный пусковой конденсатор, емкость которого должна быть выше рабочей в 2-3 раза.
Принципиальный момент — реверс обеспечивается подключение конденсатора к любой другой обмотке.
Однолинейная схема подключения электродвигателя
В энергетике часто применяются однолинейные схемы, в которых все линии питания вне зависимости от количества проводов и фаз обозначаются одной линией. Однолинейный чертеж не перегружен мелкими деталями, и это упрощает его чтение.
По однолинейной схеме удобно получать общее представление о работе и устройстве электроустановки. Трехфазные электродвигатели также обозначаются на однолинейных схемах. Важно учитывать при этом, что при разных способах коммутации фаз необходимо на чертеже указывать каждую фазу во избежание путаницы.
Чтобы подключать электрический двигатель к сети важно правильное определение назначения выводов обмоток и уже на основании имеющихся данных количество фаз, напряжение, мощность. Немаловажно выбрать наиболее подходящую схему включения.
Немаловажно выбрать наиболее подходящую схему включения.
Подключение двигателя (звезда или треугольник)
Дорогие читатели, а вы знаете как подключить асинхронный двигатель?
Имею в виду, можете определить по шильдику, когда надо подключить обмотки электродвигателя звездой, а когда треугольником?
В этой статье я подробно расскажу как подключить асинхронный двигатель. А также Вы узнаете много разных нюансов при подключении электродвигателя.
А вы знали, что если двигатель рассчитан на напряжение 380/660В- треугольник/звезда, и если его подключить по схеме звезда на напряжение 380 вольт, то в определённых условиях он сгорит. Стало интереснее? Тогда советую ознакомиться со статьёй.
Перед чтением этой статьи рекомендую прочитать статью «Что такое мощность».
Как подключить асинхронный двигатель
Специалист перед подключением электродвигателя всегда поглядит на его шильдик и ознакомится со схемой подключения обмоток электродвигателя.
Шильдик асинхронного электродвигателя выглядит примерно вот так:
По информации на шильдике мы делаем вывод, что если у нас напряжение 380 вольт, то подключаем электродвигатель по схеме треугольник. Если у нас 660 вольт, то по схеме звезда.
Так же бывают двигатели на 220/380 вольт:
По шильдику видно, что если у нас напряжение в сети 220 вольт, то подключаем треугольником. Следовательно, если 380 вольт, то звездой.
Теперь Вы уже хотя бы понимаете, как подключить асинхронный двигатель, ориентируясь на шильдик.
Почему сгорит электродвигатель при неправильном соединенииСейчас я вкратце расскажу, почему электродвигатель, у которого обмотки на 380/660 треугольник/звезда, нельзя подключать звездой на 380 вольт.
Давайте представим, что в данный момент у нас линейное напряжение равно 380 вольт.
Что такое линейное напряжение, а фазное? Не знаете? Сейчас расскажу!
Линейное напряжение – это напряжение между линейными проводами (фазами), а фазное между линейным проводом и нейтральным.
Дело в том, что при соединении обмоток треугольником, на каждую обмотку приходится линейное напряжение 380 вольт,
а при соединении звездой фазное — 220 вольт.
В итоге нам надо поддерживать требуемую мощность на валу двигателя, а напряжение упало с 380 вольт до 220 вольт (переключили обмотки с треугольника на звезду), что же делать? Ток всё сделает за нас. Он начнёт расти.
Это формула для однофазной сети, но для понимания сути пойдёт.
P=UI
Где, P- мощность, U-напряжение, I-ток.
Подставим в нашу формулу выдуманные значения и получим следующее: 440=220*2, а теперь уменьшим напряжение в два раза, 440=110*4. Увидели? Напряжение уменьшили в два раза, но, чтобы поддержать заданную мощность у нас вырос ток в два раза.
Почему при подключении звездой, ток не становится меньше (при неизменной нагрузке)При соединении обмоток электродвигателя треугольником фазный ток в 1.73 раза меньше линейного.
Давайте приведу пример: На шильдике электродвигателя указан ток 30А при соединении обмоток треугольником и напряжением 380 вольт. 30 ампер — это линейный ток, значит, чтобы получить фазный, нам надо 30/1.73. В итоге фазный ток равен 17,3 Ампера. Т.е. номинальный ток для обмотки двигателя 17,3 Ампера.
30 ампер — это линейный ток, значит, чтобы получить фазный, нам надо 30/1.73. В итоге фазный ток равен 17,3 Ампера. Т.е. номинальный ток для обмотки двигателя 17,3 Ампера.
А теперь мы переключим двигатель с треугольника на звезду, но нагрузка на валу двигателя остаётся таже самая.
При соединении электродвигателя звездой линейный ток будет равен фазному. Напряжение на обмотке уменьшится в 1.73 раза. Следовательно на обмотку будет подаваться уже не 380 вольт, а 220.
В результате по обмотке будет протекать не 17,3 А, а целых 30 Ампер. Почему?
Потому что ток будет компенсировать падение напряжения на обмотке, которое у нас упало в 1,73 раза. Значит ток вырастит в 1,73 раза. Двигатель греется и если отсутствует защита — сгорает. А двигатель стоит немалых денег, поэтому Вы должны знать как подключить асинхронный двигатель!
Еще один пример для понимания. Обратите внимание на следующий шильдик электродвигателя:
Электродвигатель треугольник/звезда: 220 вольт/380 вольт: 38,3/22,2 Ампера.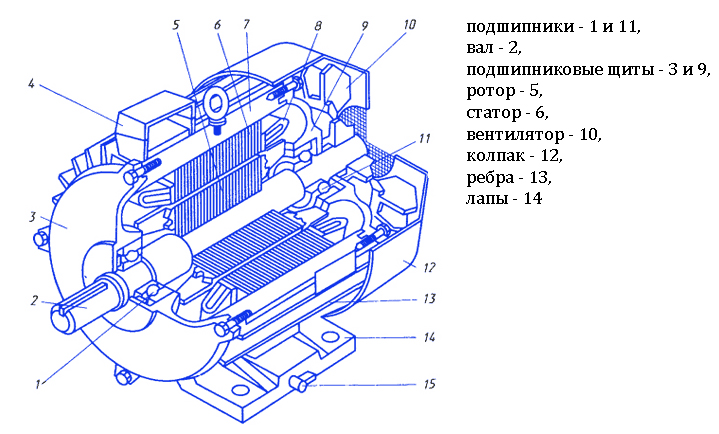
Соединяем двигатель треугольником и подаём напряжение 220 вольт. Ток (линейный) по шильдику равен 38,3 Ампер. Следовательно, фазный будет равен 38,3/1,73= 22,2 Ампер. Т.е мы определили, что фазный номинальный ток для обмотки = 22,2 Ампер. Поехали дальше…
А теперь соединяем обмотки электродвигателя звездой и подаём напряжение 380 Вольт. Ток будет равен 22,2 Ампер. В звезде линейный ток равен фазному току.
При треугольнике и питающем напряжении 220 вольт, фазный ток равен 22,2 Ампер.
При звезде и питающем напряжении 380 вольт, фазный ток равен 22,2 Ампер. Следовательно мощность у двигателя будет одинаковая при таких подключениях.
А, что если мы соединим этот двигатель звездой и подадим напряжение 220 вольт. На обмотку будет приходиться уже 127 Вольт. Поэтому ток будет компенсировать падение напряжение на обмотке в 1,73 раза и будет равен 38,3 Ампер. А обмотка у нас рассчитана на 22,2 Ампер. Двигатель сгорит.
Схема подключения обмоток электродвигателя звездойВот так выглядит борно электродвигателя и здесь обмотки соединены звездой. Т.е. концы обмоток соединены в одной точке.
Т.е. концы обмоток соединены в одной точке.
Мои коллеги-инженеры сталкивались с такими случаями, когда перемычки кидали на начало обмоток, куда подключался питающий кабель. Сразу возникало короткое замыкание.
Фазное и линейное напряжение при соединении обмоток в звезду разное, а ток одинаковый.
А теперь давайте найдём полную мощность, развиваемую электродвигателем.
Полная мощность в трёхфазной системе равна сумме полных мощностей трёх фаз:
И теперь формула полной мощности будет выглядеть вот так:
А чтобы найти активную мощность применим следующую формулу:
где cosф- коэффициент мощности, n- КПДИз формулы активной мощности выразим ток:
Схема подключения обмоток электродвигателя треугольникомВот так выглядит борно электродвигателя и здесь обмотки соединены треугольником. Т.е. конец обмотки соединён с началом следующей обмотки.
Фазное и линейное напряжение равны. Линейный ток в 1,73 раза больше фазного.
Формула полной мощности будет выглядеть вот так:
Если обратить внимание на формулу полной мощности при подключении звездой, то мы заметим, что формулы полной мощности одинаковые.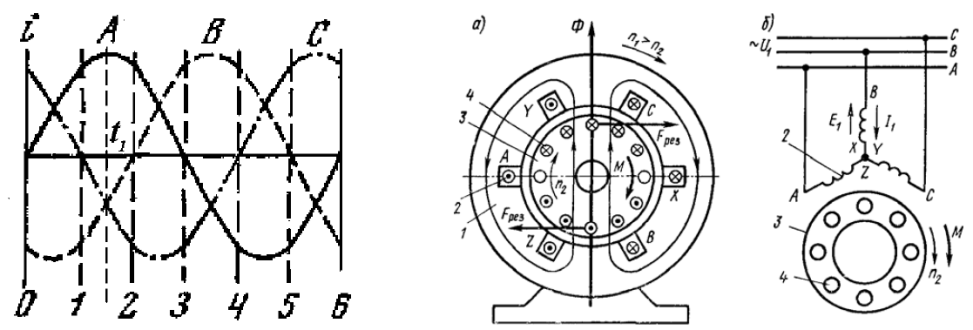
А чтобы найти активную мощность применим следующую формулу:
где cosф- коэффициент мощности, n- КПДИз формулы активной мощности выразим ток:
Внимательный читатель должен был заметить, что формула мощности одинаковая при подключении треугольником и при подключении звездой. Так и есть, просто, чтобы поддержать необходимую мощность, у нас будет меняться ток.
Но чтобы двигатель не сгорел при переключении с треугольника на звезду, надо уменьшить нагрузку на валу двигателя до тех пор, пока фазный ток не станет равный фазному току при подключении треугольником.
Поэтому и говорят, что мощность при подключении обмоток электродвигателя звездой меньше, чем при соединении треугольником.
Почему при пуске применяют схему звезда-треугольникФормула мощности в момент пуска не действует, т.к. двигатель не вращается – ЭДС Самоиндукции отсутствует (индуктивное сопротивление).
По факту у нас есть обмотка с очень маленьким сопротивлением и напряжение, подаваемое на двигатель.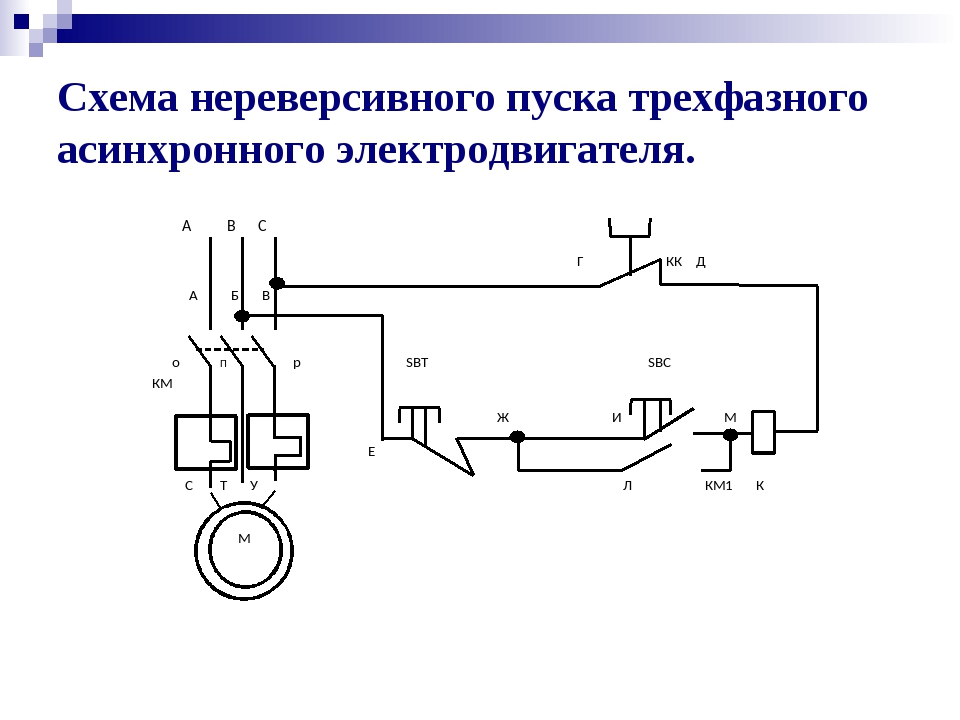 И ток здесь рассчитывается по закону Ома. Чем меньше у нас подаваемое напряжение на обмотку электродвигателя, тем меньше будет ток в обмотке.
И ток здесь рассчитывается по закону Ома. Чем меньше у нас подаваемое напряжение на обмотку электродвигателя, тем меньше будет ток в обмотке.
А мы помним, что при треугольнике у нас на обмотку подаётся линейное напряжение, а при звезде напряжение будет в 1.73 раза меньше чем на треугольнике. Следовательно, и пусковые токи будут меньше.
Но не забываем, что закон Ома действует только в момент пуска электродвигателя. Когда двигатель выходит на номинальные обороты, ему необходимо поддерживать мощность, которая присутствует на валу. А так как напряжение при звезде меньше в 1.73 раза, то начинает подниматься ток, чтобы компенсировать падение напряжения на обмотках электродвигателя.
Будьте внимательны.
Бывает попадаются шильдики электродвигателей, которые путают электриков, и они могут допустить ошибку при подключении. Например: Написана буква V, под ней нарисован треугольник, а внизу два напряжения 400 Вольт на 50 Герц и 460 Вольт на 60 Герц. Специалист думает, что буква V-это значок звезды, а так как у него напряжение 400 Вольт, то подключает звездой. А на самом деле этот движок рассчитан на одно лишь подключение- треугольником. А буква V обозначает напряжение.
А на самом деле этот движок рассчитан на одно лишь подключение- треугольником. А буква V обозначает напряжение.
Многоскоростные электродвигатели | двухскоростные | трехскоростные
Электродвигатели многоскоростные
Многоскоростные электродвигатели изготавливаются на базе основного исполнения односкоростных двигателей и подразделяются на:
- двухскоростные с отношением числа оборотов 1500/3000 (4/2 — число полюсов), 1000/1500 (6/4), 750/1500 (8/4), 750/1000 (8/6), 500/1000 (12/6)
- трехскоростные — 1000/1500/3000 (6/4/2), 750/1500/3000 (8/4/2), 750/1000/1500 (8/6/4)
- четырехскоростные — 500/750/1000/1500 (12/8/6/4)
Схемы подключения двухскоростных электродвигателей отличаются в зависимости от соотношения числа оборотов.
При соотношении 1/2, т.е — 1500/3000, 750/1500 и 500/1000 применяется следующая схема:
При соотношении 2/3 и 3/4, т.е -1000/1500, 750/1000 применяется другая схема:
Схема подключения трехскоростных электродвигателей:
Схема подключения четырехскоростных электродвигателей:
Основные технические характеристики двухскоростных двигателей
| Марка |
Мощн.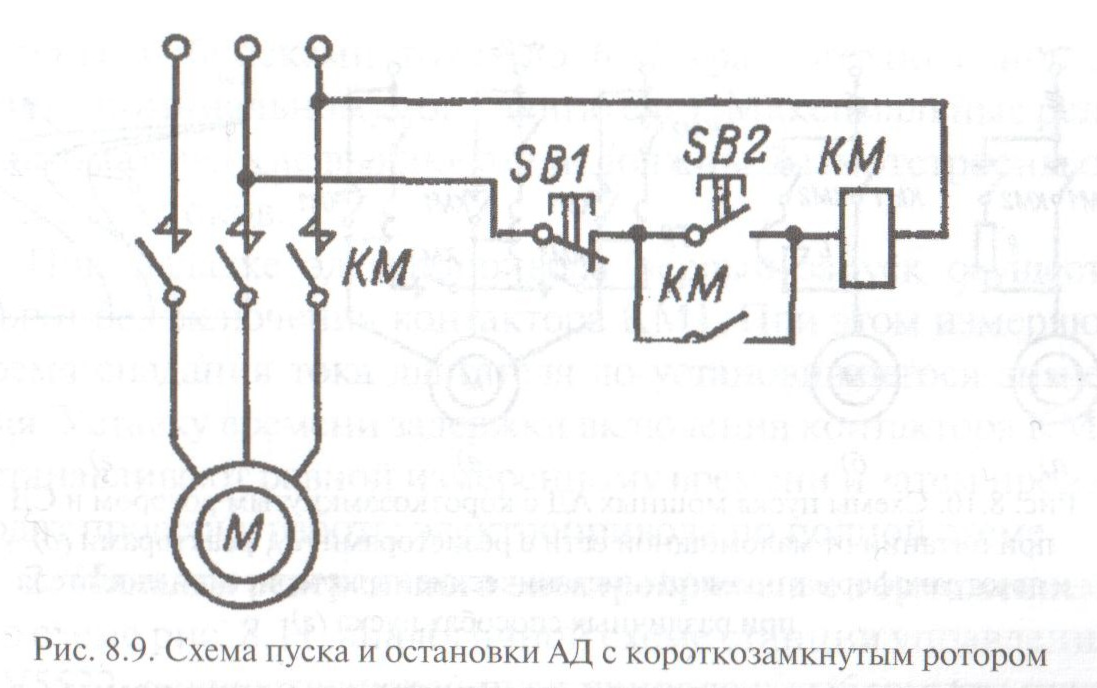 кВт |
Об/мин | Ток, А |
Момент Н*м |
Iп/Iн |
Момент инерции кгм2 |
Масса кг |
| 1500/3000 об/мин | |||||||
| АИР132S4/2 | 6 | 1455 | 12,5 | 39,4 | 7 | 0,032 | 70 |
| 7,1 | 2900 | 14,6 | 23,4 | 7 | |||
| АИР132М4/2 | 8,5 | 1455 | 17,3 | 55,8 | 7,5 | 0,045 | 83,5 |
| 9,5 | 2925 | 19,1 | 31 | 8,5 | |||
| АИР180S4/2 | 17 | 1470 | 34,5 | 110 | 6,7 | 0,16 | 170 |
| 20 | 2930 | 39,3 | 65,2 | 6,4 | |||
| АИР180М4/2 | 22 | 1470 | 43,7 | 143 | 7,5 | 0,2 | 190 |
| 26 | 2935 | 50,5 | 84,6 | 7,5 | |||
| 5А200М4/2 | 27 | 1475 | 53,4 | 175 | 7,4 | 0,27 | 245 |
| 35 | 2945 | 64,9 | 114 | 7,2 | |||
| 5А200L4/2 | 30 | 1470 | 57,6 | 195 | 7 | 0,32 | 270 |
| 38 | 2945 | 67,8 | 123 | 7 | |||
| 5А225М4/2 | 42 | 1480 | 81,7 | 271 | 7 | 0,5 | 345 |
| 48 | 2960 | 87,6 | 155 | 7,5 | |||
| 5АМ250S4/2 | 55 | 1485 | 102 | 354 | 7,3 | 1,2 | 485 |
| 60 | 2975 | 114 | 193 | 7,8 | |||
| 5АМ250М4/2 | 66 | 1485 | 121 | 424 | 7,2 | 1,7 | 520 |
| 80 | 2970 | 148 | 257 | 7,2 | |||
| 1000/1500 об/мин | |||||||
| АИР132S6/4 | 5 | 965 | 12 | 49,5 | 5,6 | 0,053 | 68,5 |
| 5,5 | 1435 | 11,1 | 36,6 | 5,7 | |||
| АИР132М6/4 | 6,7 | 970 | 16 | 66 | 6,2 | 0,074 | 81,5 |
| 7,5 | 1440 | 14,7 | 49,7 | 6,2 | |||
| АИР180М6/4 | 15 | 975 | 33,6 | 147 | 6,6 | 0,27 | 180 |
| 17 | 1450 | 33 | 112 | 6 | |||
| 5А200М6/4 | 20 | 980 | 44 | 195 | 6,5 | 0,41 | 245 |
| 22 | 1460 | 42,2 | 144 | 6 | |||
| 5А200L6/4 | 24 | 980 | 55,2 | 234 | 6,9 | 0,46 | 265 |
| 27 | 1480 | 51,5 | 174 | 6,5 | |||
| 500/1000 об/мин | |||||||
| АИР180М12/6 | 7 | 485 | 22,4 | 138 | 4,5 | 0,27 | 200 |
| 13 | 975 | 25,9 | 127 | 6 | |||
| 5А200М12/6 | 8 | 485 | 30,6 | 158 | 4 | 0,41 | 245 |
| 15 | 980 | 30,1 | 146 | 6 | |||
| 5А200L12/6 | 10 | 485 | 31,1 | 197 | 4 | 0,46 | 265 |
| 18,5 | 975 | 36,3 | 181 | 6 | |||
| 5А225М12/6 | 14 | 485 | 43,9 | 276 | 4 | 0,65 | 320 |
| 25 | 980 | 48,5 | 244 | 6 | |||
| 5АМ250S12/6 | 16 | 495 | 56,5 | 309 | 4,4 | 1,2 | 435 |
| 30 | 990 | 58,3 | 289 | 6,6 | |||
| 5АМ250М12/6 | 18,5 | 490 | 60,1 | 361 | 4 | 1,4 | 455 |
| 36 | 985 | 71,1 | 349 | 5,3 | |||
| 750/1500 об/мин | |||||||
| АИР132S8/4 | 3,6 | 715 | 9,7 | 48,1 | 4,8 | 0,053 | 68,5 |
| 5 | 1435 | 10,3 | 33,3 | 5,9 | |||
| АИР132М8/4 | 4,7 | 715 | 12,4 | 62,8 | 5 | 0,074 | 82 |
| 7,5 | 1440 | 15,8 | 49,7 | 6,4 | |||
| АИР180М8/4 | 13 | 730 | 33,6 | 170 | 5,5 | 0,27 | 180 |
| 18,5 | 1465 | 35,9 | 121 | 6,7 | |||
| 5А200М8/4 | 15 | 730 | 40,2 | 196 | 5,3 | 0,41 | 245 |
| 22 | 1460 | 42,2 | 144 | 6,4 | |||
| 5А200L8/4 | 17 | 725 | 39 | 224 | 5 | 0,46 | 275 |
| 24 | 1450 | 45,5 | 158 | 5,5 | |||
| 5А225М8/4 | 23 | 735 | 55,3 | 299 | 5,5 | 0,7 | 330 |
| 34 | 1475 | 62,7 | 220 | 6,5 | |||
| 5АМ250S8/4 | 33 | 740 | 75,3 | 426 | 5,3 | 1,2 | 435 |
| 47 | 1480 | 87,2 | 303 | 6,4 | |||
| 5АМ250М8/4 | 37 | 740 | 81,5 | 478 | 6 | 1,4 | 465 |
| 55 | 1480 | 99,8 | 355 | 7 | |||
| 750/1000 об/мин | |||||||
| АИР132S8/6 | 3,2 | 725 | 8,7 | 42,2 | 4,6 | 0,053 | 68,5 |
| 4 | 965 | 9,1 | 39,6 | 5 | |||
| АИР132М8/6 | 4,5 | 720 | 11,9 | 59,7 | 5,4 | 0,074 | 81,5 |
| 5,5 | 970 | 12,3 | 54,1 | 6 | |||
| АИР180М8/6 | 11 | 730 | 26,3 | 144 | 5,3 | 0,27 | 180 |
| 15 | 970 | 30,1 | 148 | 6 | |||
| 5А200М8/6 | 15 | 730 | 35,4 | 196 | 5,5 | 0,41 | 245 |
| 18,5 | 975 | 37,2 | 181 | 6 | |||
| 5А200L8/6 | 18,5 | 730 | 43,6 | 242 | 5,5 | 0,46 | 265 |
| 23 | 975 | 46,2 | 225 | 6 | |||
| 5А225М8/6 | 22 | 740 | 51,7 | 284 | 6 | 0,7 | 330 |
| 30 | 985 | 58,6 | 291 | 6 | |||
| 5АМ250S8/6 | 30 | 740 | 70,8 | 387 | 6 | 1,2 | 435 |
| 37 | 990 | 73,2 | 357 | 6,4 | |||
| 5АМ250М8/6 | 42 | 740 | 93,2 | 542 | 5,5 | 1,4 | 485 |
| 50 | 985 | 96,6 | 485 | 6,1 | |||
Основные технические характеристики трехскоростных двигателей
| Марка |
Мощность кВт |
Об/мин |
Ток А |
Момент Н*м |
Iп/Iн |
Момент инерц. 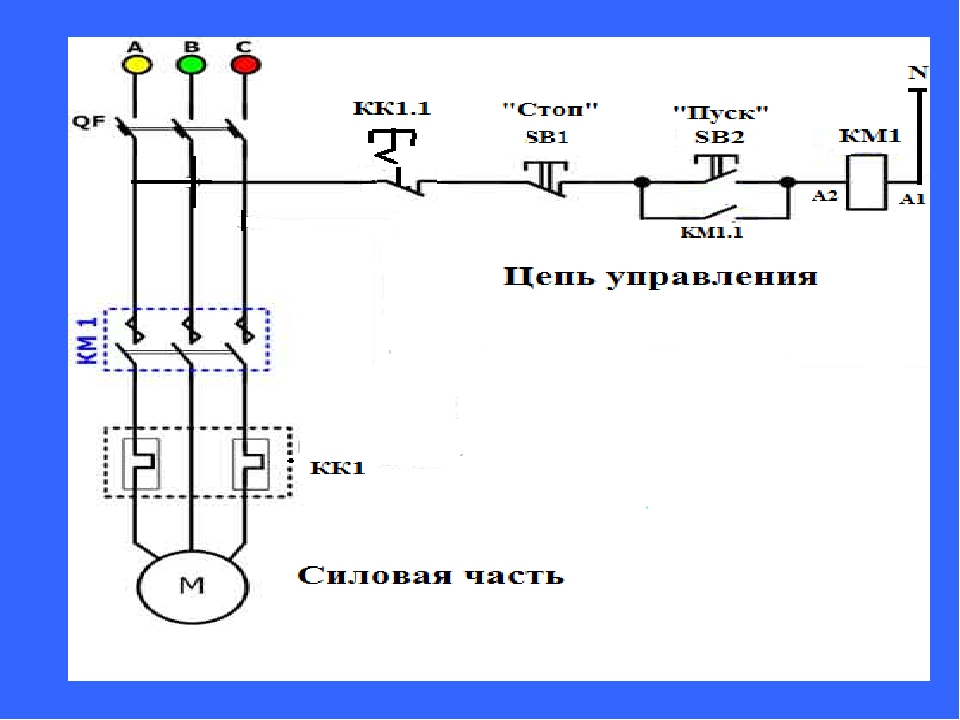 кгм2 |
Вес кг |
| 1000/1500/3000 об/мин | |||||||
| АИР132S6/4/2 | 2,8 | 955 | 7,6 | 28 | 5 | 0,053 | 70 |
| 4 | 1440 | 8,9 | 26,5 | 5 | |||
| 4,5 | 2895 | 9,7 | 14,8 | 6,3 | |||
| АИР132М6/4/2 | 3,8 | 955 | 10,1 | 38 | 5,5 | 0,074 | 83,5 |
| 5,3 | 1440 | 11,3 | 35,1 | 6,5 | |||
| 6,3 | 2895 | 13 | 20,8 | 7 | |||
| 750/1500/3000 об/мин | |||||||
| АИР132S8/4/2 | 1,8 | 710 | 6,1 | 24,2 | 4 | 0,053 | 70 |
| 3,4 | 1440 | 7,5 | 22,5 | 6 | |||
| 4 | 2895 | 8,6 | 13,2 | 6,5 | |||
| АИР132М8/4/2 | 2,4 | 710 | 8,5 | 32,3 | 4,5 | 0,074 | 83,5 |
| 4,5 | 1440 | 9,8 | 29,8 | 6,3 | |||
| 5,6 | 2895 | 11,7 | 18,5 | 6,7 | |||
| 750/1000/1500 об/мин | |||||||
| АИР132S8/6/4 | 1,9 | 710 | 6,4 | 25,5 | 4 | 0,053 | 68,5 |
| 2,4 | 950 | 6,1 | 24,1 | 4,4 | |||
| 3,4 | 1410 | 7,7 | 23 | 4,6 | |||
| АИР132М8/6/4 | 2,8 | 720 | 9,4 | 37,1 | 4,5 | 0,074 | 81,5 |
| 3 | 960 | 7,7 | 29,8 | 5 | |||
| 5 | 1425 | 10,7 | 33,5 | 5,2 | |||
| АИР180М8/6/4 | 8 | 740 | 22,9 | 103 | 5,4 | 0,27 | 180 |
| 11 | 975 | 24,3 | 108 | 6,1 | |||
| 12,5 | 1475 | 27 | 80,9 | 6,5 | |||
| 5А200М8/6/4 | 10 | 740 | 30,3 | 129 | 5,5 | 0,41 | 245 |
| 12 | 985 | 27 | 116 | 6 | |||
| 17 | 1475 | 36 | 110 | 6,5 | |||
| 5А200L8/6/4 | 12 | 735 | 31,6 | 156 | 5,3 | 0,46 | 270 |
| 15 | 985 | 31,9 | 145 | 6 | |||
| 20 | 1475 | 39,9 | 130 | 6,5 | |||
| 5А225М8/6/4 | 15 | 740 | 38,9 | 194 | 5,5 | 0,7 | 330 |
| 17 | 985 | 34,9 | 165 | 6,5 | |||
| 25 | 1480 | 48 | 160 | 6,3 | |||
| 5АМ250S8/6/4 | 22 | 740 | 52 | 284 | 5,7 | 1,2 | 435 |
| 25 | 990 | 51,1 | 241 | 7,6 | |||
| 33 | 1485 | 62,2 | 212 | 7 | |||
| 5АМ250М8/6/4 | 24 | 740 | 56,8 | 310 | 5,7 | 1,4 | 465 |
| 33 | 990 | 65,6 | 318 | 7,4 | |||
| 38 | 1485 | 71,7 | 244 | 6,8 | |||
Основные технические характеристики четырехскоростных двигателей
| Марка |
Мощность кВт |
Об/мин |
Ток А |
Момент Н*м |
Iп/Iн |
Момент инерц.  кгм2 кгм2 |
Вес кг |
| 500/750/1000/1500 об/мин | |||||||
| АИР180М12/8/6/4 | 3 | 485 | 12,7 | 59,1 | 4,1 | 0,27 | 180 |
| 5 | 730 | 15,5 | 72 | 4,8 | |||
| 6 | 965 | 12,7 | 59,4 | 4,8 | |||
| 9 | 1465 | 18,6 | 58,7 | 6 | |||
| 5А200М12/8/6/4 | 4,5 | 490 | 16,8 | 87,7 | 3,5 | 0,41 | 245 |
| 8 | 735 | 20,5 | 104 | 4,5 | |||
| 9 | 980 | 18,9 | 87,7 | 5 | |||
| 12 | 1470 | 23,3 | 78 | 5,1 | |||
| 5А200L12/8/6/4 | 5 | 490 | 18,1 | 97,4 | 4 | 0,46 | 270 |
| 9 | 735 | 23,8 | 123 | 5 | |||
| 11 | 980 | 23,5 | 107 | 4,5 | |||
| 15 | 1470 | 29,5 | 97 | 5 | |||
| 5А225М12/8/6/4 | 7,1 | 490 | 26,4 | 138 | 4,5 | 0,7 | 325 |
| 13 | 740 | 36,6 | 168 | 6 | |||
| 14 | 985 | 28,4 | 136 | 6 | |||
| 20 | 1490 | 38,4 | 128 | 7,3 | |||
| 5АМ250S12/8/6/4 | 9 | 495 | 32,5 | 174 | 4,7 | 1,2 | 435 |
| 17 | 745 | 43,5 | 218 | 5,9 | |||
| 18,5 | 990 | 37,1 | 179 | 5,9 | |||
| 27 | 1485 | 52,4 | 173 | 7 | |||
| 5АМ250М12/8/6/4 | 12 | 495 | 42,2 | 232 | 4,8 | 1,4 | 465 |
| 21 | 745 | 51,7 | 269 | 6,1 | |||
| 24 | 990 | 47,6 | 232 | 6,6 | |||
| 30 | 1490 | 57,5 | 192 | 7,8 | |||
Цены на многоскоростные эл-двигатели составлют +(40-60)% к цене базового исполнения
Асинхронный двигатель: пуск, резервирование, управление — Энергетика и промышленность России — № 01-02 (141-142) январь 2010 года — WWW.
 EPRUSSIA.RU
EPRUSSIA.RUГазета «Энергетика и промышленность России» | № 01-02 (141-142) январь 2010 года
В промышленных системах существует категория потребителей, которые требуют непрерывного и качественного электроснабжения независимо от присутствия и качества напряжения в электрической сети.Построение систем гарантированного электроснабжения
Для этого применяются системы, построенные на основе электронных преобразователей напряжения и аккумуляторной батареи, обозначаемые UPS (Uninterruptible Power System). Стандартный UPS, выполненный по технологии Online, обеспечивает бесперебойное питание потребителей переменным напряжением стабильной амплитуды и частоты, не зависящим от качества напряжения в электрической сети.
Стандартные UPS применяют для питания большинства потребителей, таких, как: компьютерные системы, аварийные источники освещения, устройства телекоммуникации, контроллеры КИПиА, контроллеры АСУ ТП и т. д. Однако существуют категории потребителей, требующих индивидуального подхода в решении вопроса гарантированного электроснабжения. Стандартные UPS допускают кратковременную перегрузку на выходе максимум до трех номинальных значений выходного тока. В частности, для запуска асинхронных двигателей, подключенных в качестве потребителей, такой перегрузочной способности стандартного UPS недостаточно, т. к. пусковые токи двигателей могут шестикратно превышать номинальный ток. Дополнительный фактор, что ток питания двигателя, получаемый от перегруженного UPS, не обладает синусоидальной формой, что может привести к нарушениям во время запуска, а также к полному отсутствию запуска. Проблему можно решить увеличением номинальной мощности UPS, но это приводит к удорожанию всей системы. Фирма APS Energia предлагает техническое решение для данной категории потребителей.
Однако существуют категории потребителей, требующих индивидуального подхода в решении вопроса гарантированного электроснабжения. Стандартные UPS допускают кратковременную перегрузку на выходе максимум до трех номинальных значений выходного тока. В частности, для запуска асинхронных двигателей, подключенных в качестве потребителей, такой перегрузочной способности стандартного UPS недостаточно, т. к. пусковые токи двигателей могут шестикратно превышать номинальный ток. Дополнительный фактор, что ток питания двигателя, получаемый от перегруженного UPS, не обладает синусоидальной формой, что может привести к нарушениям во время запуска, а также к полному отсутствию запуска. Проблему можно решить увеличением номинальной мощности UPS, но это приводит к удорожанию всей системы. Фирма APS Energia предлагает техническое решение для данной категории потребителей.
FAT – система гарантированного электроснабжения асинхронных электродвигателей
В промышленных системах различных отраслей в качестве одной из составляющих применяются приводные системы, которые должны бесперебойно вращаться электродвигателями, либо необходим старт двигателя в момент исчезновения напряжения в электрической сети. В качестве примера подобных приводных систем можно рассматривать:
В качестве примера подобных приводных систем можно рассматривать:
• маслонасосы смазки подшипников турбогенераторов;
• механизмы турбогенераторов, поддерживающие вращения ротора после прекращения подачи пара в турбину;
• вентиляторы подачи выхлопных газов к дымоходам;
• мазутные насосы;
• циркуляционные насосы, водяные насосы, пополняющие котлы и т. п.
Одним из вариантов решения проблемы гарантированного электроснабжения вышеупомянутых приводных систем является использование двигателей постоянного тока с электронными регуляторами и резервным питанием от аккумуляторных батарей. К сожалению, существующие недостатки двигателей постоянного тока исключают повсеместное применение этих систем. К этим недостаткам относятся:
• большие габариты, а также стоимость двигателя постоянного тока по отношению к асинхронному двигателю;
• ограниченный срок службы из‑за износа коллектора и потребность в обслуживании;
• искрение коллектора.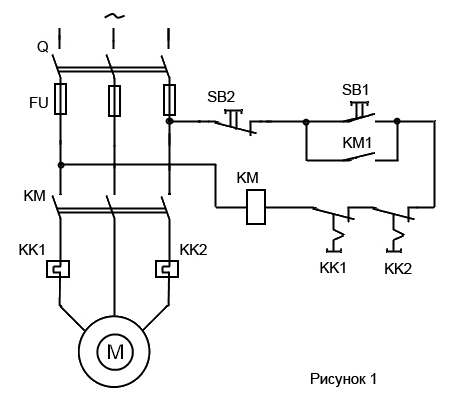
Последний недостаток особенно нужно брать во внимание, когда двигатель используется в приводе масляных насосов или работает вблизи или внутри взрывоопасных производственных зон.
Этих недостатков лишена система, построенная на основе асинхронного двигателя и системы FAT, схема которой изображена на рисунке 2a.
В нормальном состоянии двигатель запитан от электрической сети через выпрямитель и преобразователь DC/AC. При исчезновении напряжения в электрической сети двигатель через этот же преобразователь бесперебойно переходит на питание от аккумуляторной батареи. Кроме того, при включении FAT обеспечивает плавный пуск двигателя за счет автоматического регулирования частоты напряжения питания двигателя, в результате чего отсутствуют пусковые токи и перегрузка силовых цепей на выходе FAT.
Представленная на рисунке 2а схема является стандартной схемой системы FAT. По желанию заказчика APS Energia может расширить функции системы, как показано на рисунках 2б и 2в.
Данная система обеспечивает гарантированное питание дополнительных потребителей за счет применения второго инвертора.
В данной системе возможность регулирования частоты напряжения, питающего двигатель, позволяет регулировать производительность насоса. Это обеспечивает стабилизацию давления или расхода в системе, к которой подключен насос.
Преимущества использования
системы FAT производства APS Energia
В качестве двигателя приводной системы используется очень простой и дешевый асинхронный электродвигатель.
В сети отсутствуют броски тока, потребляемого системой FAT при пуске двигателя. Рисунок 4б представляет запуск двигателя насоса, запитанного от системы FAT. Пусковой ток двигателя равен номинальному току, но при этом двигатель сразу после пуска развивает максимальный момент на валу. Данный режим работы достигается за счет автоматического регулирования частоты и напряжения питания на выходе FAT.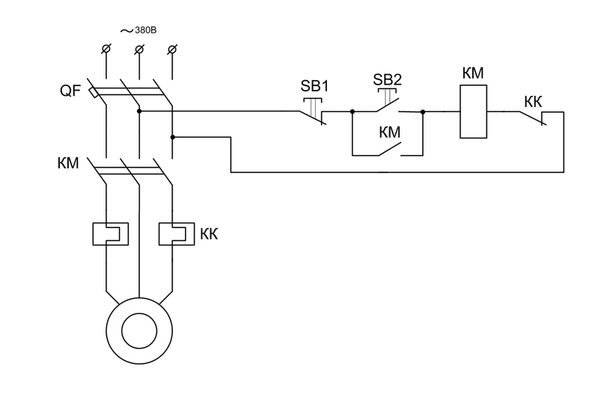 Это значительно облегчает запуск любого двигателя, а особенно тяжелый запуск двигателя, например запуск мазутного насоса зимой. Для сравнения, момент на валу и протекание тока в двигателе, запитанном от электрической сети или от стандартного UPS, представлены на рисунке 4а.
Это значительно облегчает запуск любого двигателя, а особенно тяжелый запуск двигателя, например запуск мазутного насоса зимой. Для сравнения, момент на валу и протекание тока в двигателе, запитанном от электрической сети или от стандартного UPS, представлены на рисунке 4а.
Путем подбора емкости аккумуляторной батареи в системе FAT обеспечивается требуемое время работы потребителей во время аварии в сети.
Путем введения в систему FAT обратной связи от приводной системы, например сигналов от датчиков давления или расхода трубопровода, можно легко регулировать параметры установок, в которых работают насосы, приводом которых являются асинхронные двигатели (регулируемая частота выходного напряжения FAT).
Путем установки дополнительных элементов в систему FAT:
• появляется возможность запитать дополнительных потребителей стабильным переменным напряжением;
• после запуска и синхронизации с напряжением сети двигатель, питающийся от FAT, может быть переключен на питание от электрической сети. При исчезновении напряжения в сети FAT выполнит обратное переключение и обеспечит работу двигателя от аккумуляторных батарей. Данное решение аналогично функции By-pass, используемой в стандартном UPS.
При исчезновении напряжения в сети FAT выполнит обратное переключение и обеспечит работу двигателя от аккумуляторных батарей. Данное решение аналогично функции By-pass, используемой в стандартном UPS.
Путем установки дополнительного программатора система FAT может обеспечить, при больших мощностях и стартовых нагрузках, запуск двигателя в запрограммированном под его индивидуальные параметры режиме.
асинхронного двигателя — цепь ротора и статора
Эквивалентная схема асинхронного двигателя обеспечивает рабочие характеристики, которые оцениваются для условий установившегося режима. Асинхронный двигатель основан на принципе индукции напряжений и токов. Напряжение и ток индуцируются в цепи ротора из цепи статора для работы. Эквивалентная схема асинхронного двигателя аналогична схеме замещения трансформатора.
Состав:
Модель цепи статора Модель цепи статора асинхронного двигателя состоит из сопротивления фазной обмотки статора R 1 , реактивного сопротивления утечки фазной обмотки статора X 1 , как показано на принципиальной схеме ниже.
Ток холостого хода I 0 моделируется чисто индуктивным реактором X 0 с намагничивающей составляющей I µ и безиндуктивным резистором R 0 , несущим ток потерь в сердечнике I ω .Таким образом,
Полный ток намагничивания I 0 в случае асинхронного двигателя значительно больше, чем у трансформатора. Это связано с более высоким сопротивлением, вызванным воздушным зазором асинхронного двигателя. Как мы знаем, в трансформаторе ток холостого хода варьируется от 2 до 5% номинального тока, тогда как в асинхронном двигателе ток холостого хода составляет примерно 25-40% номинального тока в зависимости от размера двигателя. Значение намагничивающего реактивного сопротивления X 0 также очень мало в асинхронном двигателе.
Модель
Когда на обмотки статора подается трехфазное питание, в обмотках ротора машины индуцируется напряжение. Чем больше будет относительное движение ротора и магнитных полей статора, тем больше будет результирующее напряжение ротора.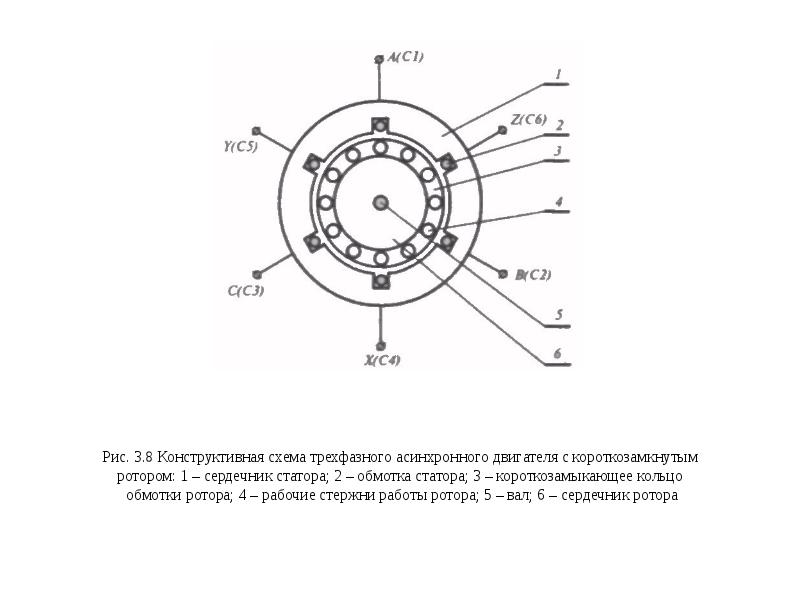 Наибольшее относительное движение происходит в состоянии покоя. Это состояние также известно как состояние заблокированного ротора или заблокированного ротора. Если индуцированное напряжение ротора в этом состоянии составляет E 20 , то индуцированное напряжение при любом скольжении определяется уравнением, показанным ниже.
Наибольшее относительное движение происходит в состоянии покоя. Это состояние также известно как состояние заблокированного ротора или заблокированного ротора. Если индуцированное напряжение ротора в этом состоянии составляет E 20 , то индуцированное напряжение при любом скольжении определяется уравнением, показанным ниже.
Сопротивление ротора постоянно и не зависит от скольжения. Реактивное сопротивление асинхронного двигателя зависит от индуктивности ротора и частоты напряжения и тока в роторе.
Если L 2 — это индуктивность ротора, реактивное сопротивление ротора определяется уравнением, показанным ниже.
Но, как известно,
Следовательно,
Где X 20 — реактивное сопротивление ротора в состоянии покоя.
Схема ротора показана ниже.
Полное сопротивление ротора определяется уравнением ниже.
Ток ротора по фазе определяется уравнением, показанным ниже.
Здесь I 2 — ток частоты скольжения, создаваемый напряжением sE 20 , индуцированным частотой скольжения, действующим в цепи ротора, имеющим полное сопротивление на фазу (R 2 + jsX 20 ).
Теперь, разделив уравнение (5) на промах s, мы получим следующее уравнение.
R 2 — это постоянное сопротивление и переменное реактивное сопротивление утечки sX 20 .Аналогично, схема ротора, показанная ниже, имеет постоянное реактивное сопротивление рассеяния X 20 и переменное сопротивление R 2 / с.
Уравнение (6) выше объясняет вторичную цепь воображаемого трансформатора с постоянным соотношением напряжений и одинаковой частотой с обеих сторон. Этот воображаемый неподвижный ротор проводит тот же ток, что и реальный вращающийся ротор. Это позволяет передавать полное сопротивление вторичного ротора на сторону первичного статора.
Примерная эквивалентная схема асинхронного двигателя
Эквивалентная схема дополнительно упрощается путем смещения ветвей полного сопротивления шунта R 0 и X 0 на входные клеммы, как показано на принципиальной схеме ниже.
Примерная схема основана на предположении, что V 1 = E 1 = E ’ 2 . В приведенной выше схеме единственный компонент, который зависит от скольжения, — это сопротивление. Все остальные количества постоянны. Следующие уравнения могут быть записаны на любом заданном бланке s следующим образом: —
В приведенной выше схеме единственный компонент, который зависит от скольжения, — это сопротивление. Все остальные количества постоянны. Следующие уравнения могут быть записаны на любом заданном бланке s следующим образом: —
Импеданс за пределами AA ’равен
Подставляя значение ZAA ’из уравнения (7) в уравнение (8), получаем
Следовательно,
Ток холостого хода I 0 —
Полный ток статора определяется уравнением, показанным ниже.
Общие потери в сердечнике рассчитываются по приведенному ниже уравнению.
Мощность воздушного зазора на фазу определяется как: развиваемый крутящий момент определяется уравнением, приведенным ниже.
Приведенное выше уравнение является уравнением крутящего момента асинхронного двигателя. Приблизительная модель эквивалентной схемы является стандартной для всех расчетов производительности асинхронного двигателя.
Схема, эквивалентнаядля асинхронного двигателя
Асинхронный двигатель — это хорошо известное устройство, которое работает по принципу трансформатора.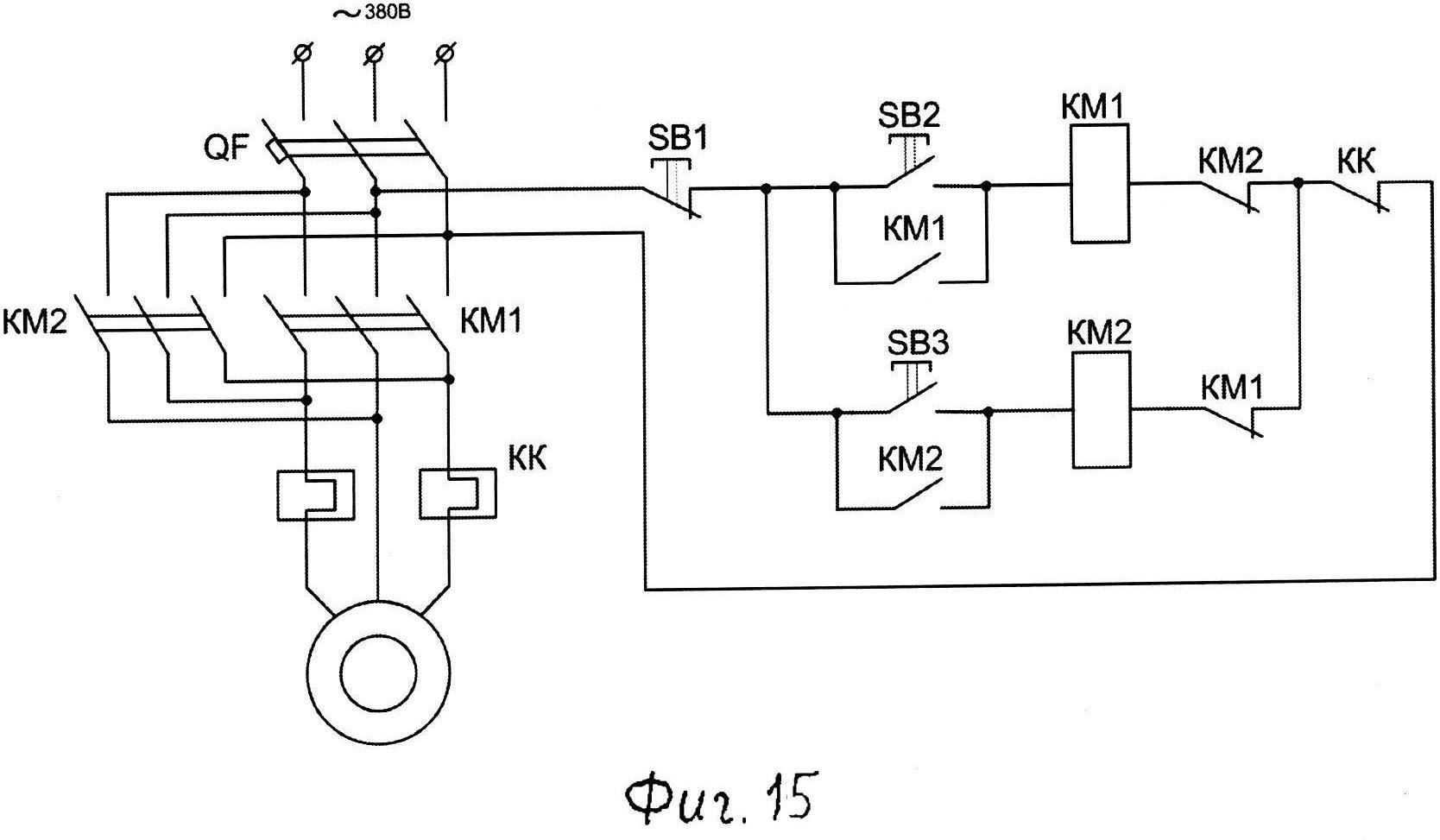 Так его еще называют вращающимся трансформатором. То есть, когда на его статор подается ЭДС, то в результате электромагнитной индукции в его роторе индуцируется напряжение. Таким образом, асинхронный двигатель называется трансформатором с вращающейся вторичной обмоткой. Здесь первичная обмотка трансформатора напоминает обмотку статора асинхронного двигателя, а вторичная — ротор.
Так его еще называют вращающимся трансформатором. То есть, когда на его статор подается ЭДС, то в результате электромагнитной индукции в его роторе индуцируется напряжение. Таким образом, асинхронный двигатель называется трансформатором с вращающейся вторичной обмоткой. Здесь первичная обмотка трансформатора напоминает обмотку статора асинхронного двигателя, а вторичная — ротор.
Асинхронный двигатель всегда работает со скоростью ниже синхронной или полной нагрузки, а относительная разница между синхронной скоростью и скоростью вращения называется скольжением, которое обозначается s.
Где, N с — синхронная скорость вращения, которая определяется по формуле —
Где, f — частота напряжения питания.
P — количество полюсов станка.
Эквивалентная схема асинхронного двигателя
Эквивалентная схема любой машины показывает различные параметры машины, такие как омические потери, а также другие потери.
Потери моделируются только индуктором и резистором. Потери в меди возникают в обмотках, поэтому принимается во внимание сопротивление обмотки.Кроме того, обмотка имеет индуктивность, для которой наблюдается падение напряжения из-за индуктивного сопротивления, и также используется термин, называемый коэффициентом мощности. В случае трехфазного асинхронного двигателя существует два типа эквивалентных схем:
Потери в меди возникают в обмотках, поэтому принимается во внимание сопротивление обмотки.Кроме того, обмотка имеет индуктивность, для которой наблюдается падение напряжения из-за индуктивного сопротивления, и также используется термин, называемый коэффициентом мощности. В случае трехфазного асинхронного двигателя существует два типа эквивалентных схем:
Точная эквивалентная схема
Здесь R 1 — сопротивление обмотки статора.
X 1 — индуктивность обмотки статора.
R c — компонент потерь в сердечнике.
X M — реактивное сопротивление намагничивания обмотки.
R 2 / с — мощность ротора, которая включает в себя выходную механическую мощность и потери в меди ротора.
Если мы нарисуем схему, относящуюся к статору, то схема будет выглядеть так:
Здесь все остальные параметры такие же, за исключением:
R 2 ’- сопротивление обмотки ротора относительно обмотки статора.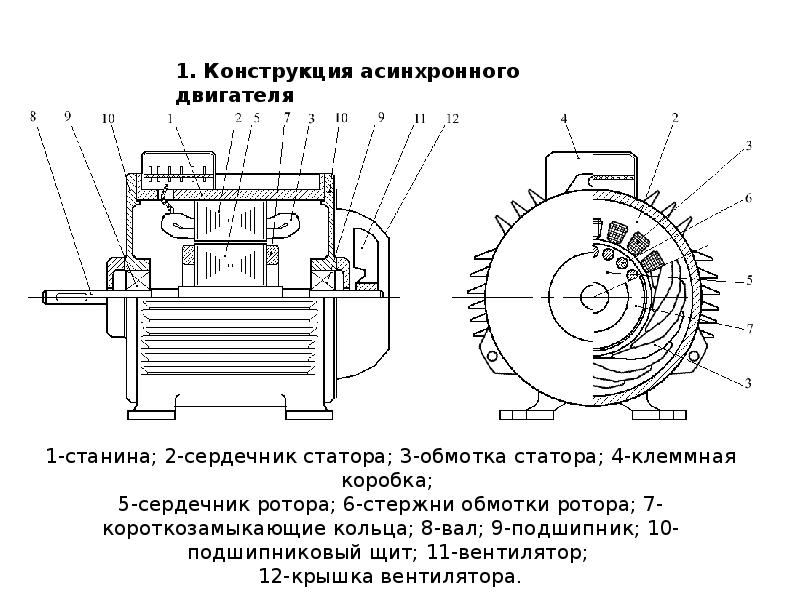
X 2 ’- индуктивность обмотки ротора относительно обмотки статора.
R 2 (1 — с) / с — это сопротивление, которое показывает мощность, которая преобразуется в механическую выходную мощность или полезную мощность.Мощность, рассеиваемая в этом резисторе, является полезной выходной мощностью или мощностью на валу.
Приблизительная эквивалентная схема
Приблизительная эквивалентная схема нарисована только для упрощения наших вычислений путем удаления одного узла. Ветвь шунта смещена в сторону первичного контура. Это было сделано, поскольку падение напряжения между сопротивлением статора и индуктивностью меньше, и нет большой разницы между напряжением питания и индуцированным напряжением. Однако это не подходит по следующим причинам:
- Магнитная цепь асинхронного двигателя имеет воздушный зазор, поэтому ток возбуждения больше по сравнению с трансформатором, поэтому следует использовать точную эквивалентную схему.
- Индуктивность ротора и статора у асинхронного двигателя больше.
- В асинхронных двигателях используются распределенные обмотки.

Эту модель можно использовать, если необходимо провести приблизительный анализ для больших двигателей. Для двигателей меньшего размера мы не можем использовать это.
Соотношение мощности эквивалентной цепи
- Входная мощность статора — 3 В 1 I 1 Cos ().
Где, В 1 — приложенное напряжение статора.
I 1 — ток, потребляемый обмоткой статора.
Cos (Ɵ) — статора силового статора. - Потребляемая мощность ротора =
Потребляемая мощность — потери в меди и стали статора. - Ротор Потери в меди = проскальзывание × мощность, подаваемая на ротор.
- Развиваемая мощность = (1 — с) × входная мощность ротора.
Эквивалентная схема однофазного асинхронного двигателя
Существует разница между однофазными и трехфазными эквивалентными схемами. Схема однофазного асинхронного двигателя описывается теорией двойного вращающегося поля, которая утверждает, что:
Стационарное пульсирующее магнитное поле может быть разделено на два вращающихся поля, оба имеют равную величину, но противоположны по направлению. Таким образом, индуцированный чистый крутящий момент равен нулю в состоянии покоя. Здесь прямое вращение называется вращением с проскальзыванием s, а обратное вращение — с проскальзыванием (2 — s). Эквивалентная схема —
Таким образом, индуцированный чистый крутящий момент равен нулю в состоянии покоя. Здесь прямое вращение называется вращением с проскальзыванием s, а обратное вращение — с проскальзыванием (2 — s). Эквивалентная схема —
В большинстве случаев компонентой потерь в сердечнике r 0 пренебрегают, так как это значение довольно велико и не сильно влияет на расчет.
Здесь Z f показывает прямое сопротивление, а Z b показывает обратное сопротивление.
Кроме того, сумма проскальзывания вперед и назад равна 2, поэтому в случае проскальзывания назад она заменяется на (2 — s).
R 1 = Сопротивление обмотки статора.
X 1 = Индуктивное реактивное сопротивление обмотки статора.
X м = Реактивное сопротивление намагничивания.
R 2 ’= Реактивное сопротивление ротора относительно статора.
X 2 ’= Индуктивное реактивное сопротивление ротора относительно статора.
Расчет мощности эквивалентной цепи
- Найдите Z f и Z b .
- Найдите ток статора, который определяется как напряжение статора / полное сопротивление цепи.
- Затем найдите входную мощность, которая определяется как
Напряжение статора × ток статора × Cos ()
Где Ɵ — угол между током статора и напряжением. - Развиваемая мощность (P g ) — это разница между мощностью прямого поля и мощностью обратного направления. Прямая и обратная мощность определяется мощностью, рассеиваемой на соответствующих резисторах.
- Потери меди в роторе даны из-за проскальзывания × P г .
- Выходная мощность определяется по формуле —
P г — s × P г — Потери вращения.
Потери вращения включают потери на трение, потери на ветер, потери в сердечнике. - Эффективность также можно рассчитать, разделив выходную мощность на входную.
Электрические машины — Схема эквивалента асинхронного двигателя
Входная мощность для трехфазной индукционной машины равна
.
\ [ P_ {in} = \ sqrt {3} V_ {LL} I_ {L} \ cos \ theta = 3V_1I_1 \ cos \ theta \]
Выходная мощность может быть найдена путем вычитания потерь из входной мощности
Убытки
- Потери меди в статоре.2R_2 \]
- Core Loss или Iron Loss. Потери из-за вихревых токов и гистерезисных потерь в пластинах. Это можно вычислить с помощью резистора \ (R_c \). Иногда потери в сердечнике объединяются с потерями на трение, ветер и паразитные потери. как вращательные потери.
Мощность ротора
Мощность, передаваемая на ротор, называется «мощностью воздушного зазора». Рассмотрим эквивалент Схема ниже (сопротивление потерь в сердечнике было удалено, а потери в сердечнике сгруппированы в потери при вращении).2R_2 \ frac {1-s} {s} \]
Из приведенных выше уравнений видно, что мощность, преобразуемая в механическую систему, является функцией мощности воздушного зазора и скольжения:
\ [ P_ {conv} = (1-s) P_ {gap} \]
Конечная выходная мощность может быть получена путем вычитания потерь на вращение из \ (P_ {conv} \).
\ [ P_ {out} = P_ {conv} -P_ {rotational} \]
Страница не найдена | MIT
Перейти к содержанию ↓- Образование
- Исследование
- Инновации
- Прием + помощь
- Студенческая жизнь
- Новости
- Выпускников
- О MIT
- Подробнее ↓
- Прием + помощь
- Студенческая жизнь
- Новости
- Выпускников
- О MIT
Попробуйте поискать что-нибудь еще! Что вы ищете? Увидеть больше результатов
Предложения или отзывы?
Эквивалентная схема трехфазного асинхронного двигателя Трехфазный асинхронный двигатель работает в некотором роде как трансформатор. В трансформаторе переменное напряжение подается на первичную обмотку, что создает поток переменного тока в сердечнике. Этот поток связывает вторичную обмотку и индуцирует напряжение той же частоты, но с напряжением, которое зависит от коэффициента трансформации трансформатора.
В трансформаторе переменное напряжение подается на первичную обмотку, что создает поток переменного тока в сердечнике. Этот поток связывает вторичную обмотку и индуцирует напряжение той же частоты, но с напряжением, которое зависит от коэффициента трансформации трансформатора.
Трехфазный асинхронный двигатель имеет напряжение, приложенное к статору, которое создает вращающуюся магнитную волну. Когда эта волна проходит по стержням ротора, индуцируются напряжения; однако частота напряжения определяется скольжением двигателя. Оказывается, сходство распространяется и на эквивалентные схемы двух устройств.
Получение эквивалентной схемы трехфазного асинхронного двигателя На рисунке 1 показана конструкция одной фазы обмотки якоря. Когда на катушку подается напряжение, в обмотке течет ток и устанавливается магнитный поток, как в трансформаторе. На рисунке 1 взаимный поток обозначен сплошными линиями, проходящими через середину ротора, а поток утечки обозначен пунктирными линиями, которые не пересекают воздушный зазор.
Воздушный зазор в двигателе намного больше, чем в трансформаторе, что означает, что сопротивление пути потока будет намного выше.Индуктивность, конечно, обратно пропорциональна сопротивлению, поэтому индуктивность и, следовательно, реактивное сопротивление будут меньше. В результате ток холостого хода (или ток возбуждения) будет значительно выше в процентном отношении для асинхронного двигателя. В то время как ток возбуждения трансформатора составляет всего несколько процентов от номинального тока, ток возбуждения для асинхронного двигателя может составлять 40% или более номинального тока.
РИСУНОК 1 Взаимный поток и поток утечки из-за обмотки статора.
При разработке эквивалентной схемы для асинхронного двигателя можно вспомнить эквивалентную схему трансформатора . Первичная цепь содержала индуктивности для учета утечки и взаимные потоки и сопротивления для учета сопротивления первичной обмотки и потерь в сердечнике. Статор асинхронного двигателя практически такой же; существуют взаимные потоки и потоки утечки, сопротивление обмоток и потери в сердечнике из-за гистерезиса и вихревых токов.
Статор асинхронного двигателя практически такой же; существуют взаимные потоки и потоки утечки, сопротивление обмоток и потери в сердечнике из-за гистерезиса и вихревых токов.
На рисунке 2 показана эквивалентная схема одной фазы статора асинхронного двигателя.Предполагается, что обмотки соединены звездой, поэтому напряжение, приложенное к цепи, представляет собой напряжение между фазой и нейтралью. Элементы R s и X s — это сопротивление обмотки статора и реактивное сопротивление утечки, а X m — реактивное сопротивление намагничивания. Эта схема по сути такая же, как первичная цепь трансформатора. Единственная разница в том, что мы не включили сопротивление потерь в сердечнике. Потери в сердечнике часто учитываются отдельно и поэтому не представлены в эквивалентной схеме.
Если посмотреть на схему статора на Рисунке 2, I 1 — это ток, входящий в обмотку. Как уже говорилось, для установления магнитного поля требуется значительный ток I m .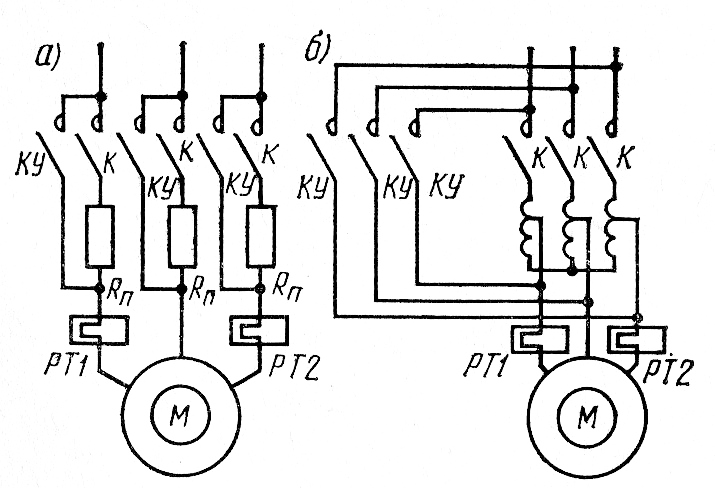 Оставшийся ток, I 2 , является нагрузочной частью тока статора. MMF I 2 точно отменяет MMF тока ротора. В векторной записи мы можем написать
Оставшийся ток, I 2 , является нагрузочной частью тока статора. MMF I 2 точно отменяет MMF тока ротора. В векторной записи мы можем написать
\ [\ begin {matrix} {{V} _ {1}} \ text {} = \ text {} {{E} _ {1}} \ text {} + \ текст {} {{I} _ {1}} ({{R} _ {s}} \ text {} + j {{X} _ {s}}) & {} & \ left (1 \ right) \ \\ end {matrix} \]
Где E 1 — ЭДС, индуцированная в обмотке статора взаимным потоком.Нам нужно добавить ротор в эквивалентную схему.
РИСУНОК 2 Эквивалентная схема статора асинхронного двигателя.
Глядя на рисунок 3, когда поток статора проходит через проводник ротора, будут индуцироваться напряжение и ток. Если ротор не может вращаться (заблокированный ротор), тогда напряжение и ток, индуцируемые в роторе, будут иметь ту же частоту, что и статор.
РИСУНОК 3 Индуцирование токов ротора вращающимся магнитным полем статора.
У нас есть трансформатор необычной формы, в котором магнитный поток вращается вокруг проводников ротора. В случае трансформатора мы относим величины с одной стороны к другой, используя коэффициент трансформации. Поскольку большинство асинхронных двигателей имеют ротор с короткозамкнутым ротором, определить количество оборотов ротора непросто. К счастью, мы можем избежать этой проблемы, всегда работая с величинами, относящимися к статору.
В случае трансформатора мы относим величины с одной стороны к другой, используя коэффициент трансформации. Поскольку большинство асинхронных двигателей имеют ротор с короткозамкнутым ротором, определить количество оборотов ротора непросто. К счастью, мы можем избежать этой проблемы, всегда работая с величинами, относящимися к статору.
На рисунке 4 показано, что происходит, когда ротор заблокирован. Когда поле статора перемещается проводниками ротора, индуцируется напряжение заблокированного ротора E BR (равное E 1 ).Поскольку катушки закорочены, ток протекает через сопротивление и реактивное сопротивление утечки катушек ротора. На рисунке 4 R r — это сопротивление одной фазы обмотки ротора, а X r — реактивное сопротивление утечки ротора, когда в роторе протекают частотные токи статора, что происходит только тогда, когда ротор неподвижен (скольжение = 1.0). Конечно, как R r , так и X r относятся к статору с помощью соответствующего передаточного числа.
РИСУНОК 4 Эквивалентная схема ротора в состоянии заблокированного ротора.
Чтобы асинхронный двигатель был нам полезен, он должен вращаться, что означает, что скольжение меньше 1.0. Если ротор движется, происходят две вещи:
- Относительная скорость поля статора и обмотки ротора равна sn s вместо n s . Напомним, что E = Blv. Таким образом, индуцированное в роторе напряжение будет sE
- . Поскольку частота токов ротора равна sf s , реактивное сопротивление рассеяния будет иметь значение sX r .
Замена E 1 на sE 1 и X r на sX r на рисунке 4 дает схему, показанную на рисунке 5, которая действительна при любом значении скольжения.Чтобы подключить схему ротора на рис. 5 к схеме статора на рис. 2, мы должны учитывать разные частоты.
РИСУНОК 5 Цепь ротора на частоте скольжения.
Так же, как мы относили импедансы к соотношению витков, мы можем относить их к частоте.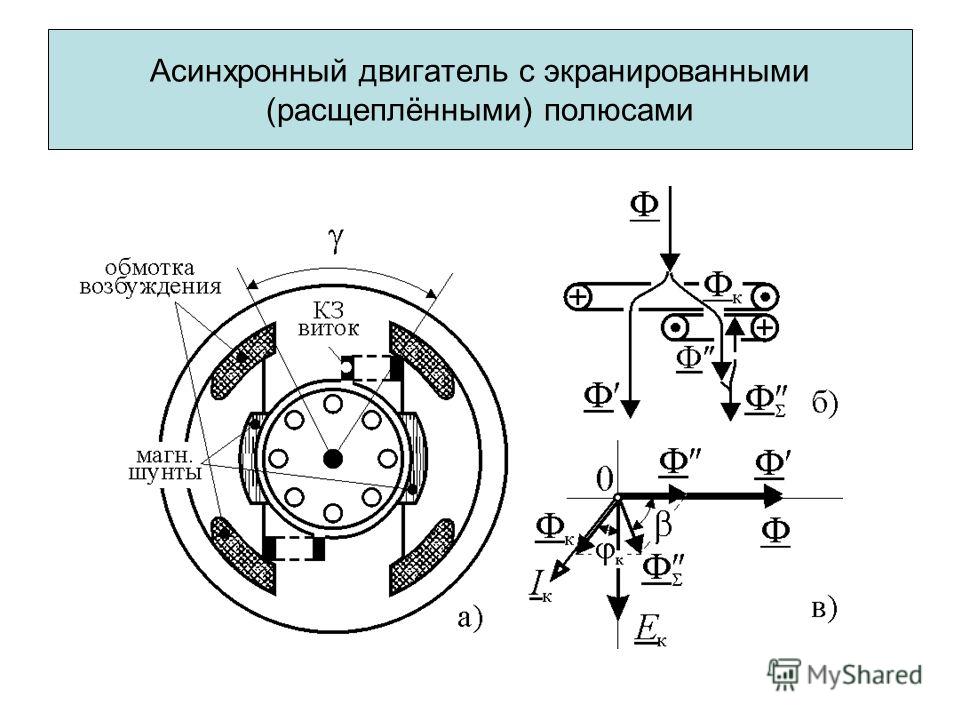 Из схемы на рисунке 5 мы можем записать
Из схемы на рисунке 5 мы можем записать
\ [\ begin {matrix} \ text {s} {{\ text {E}} _ {\ text {1}}} \ text {+} {{\ text {I}} _ {\ text {2}}} \ text {(} {{\ text {R}} _ {\ text {r}}} \ text {+ js} {{\ text {X}} _ {\ text {r}}} \ text {)} & {} & \ left (2 \ right) \\\ end {matrix} \]
Разделив уравнение 7-8 на s, получим
$ \ begin {matrix } {{E} _ {1}} + {{I} _ {2}} \ left (\ frac {{{R} _ {r}}} {s} + j {{X} _ {r}} \ right) & {} & \ left (3 \ right) \\\ end {matrix} $
Уравнение 3 может быть представлено схемой на Рисунке 6, которая представляет собой эквивалентную схему ротора, относящуюся к статору по отношению к статору. и по частоте.
РИСУНОК 6 Эквивалентная схема ротора относительно частоты статора.
Эту схему можно подключить к эквивалентной схеме статора, но рекомендуется разделить сопротивление на два отдельных компонента. Для удобства мы можем написать:
\ [\ begin {matrix} \ frac {{{R} _ {r}}} {s} = {{R} _ {r}} + \ frac {{{R} _ {r}}} {s} — {{R} _ {r}} & {} & \ left (4 \ right) \\\ end {matrix} \]
Объединение двух последних членов справа уравнения 4 дает
\ [\ begin {matrix} \ frac {{{R} _ {r}}} {s} = {{R} _ {r}} + {{R} _ {r}} \ left (\ frac {1-s} {s} \ right) & {} & \ left (5 \ right) \\\ end {matrix} \]
Замена резистивного элемента на Рисунке 6 двумя резистивными элементами на правая часть уравнения 5 дает эквивалентную схему ротора, показанную на рисунке 7. О причинах этой манипуляции мы поговорим чуть позже.
О причинах этой манипуляции мы поговорим чуть позже.
РИСУНОК 7 Цепь ротора, относящаяся к статору, с сопротивлением ротора, разделенным на две составляющие.
Наконец, комбинируя эквивалентную схему ротора на Рисунке 7 с эквивалентной схемой статора на Рисунке 2, мы получаем установившуюся эквивалентную схему для одной фазы асинхронного двигателя, соединенного звездой, как показано на Рисунке 8.
РИСУНОК 8 Эквивалентная схема пофазного асинхронного двигателя.
Снова запираясь на роторной части эквивалентной схемы на Рисунке 8, резистор R r представляет сопротивление обмотки ротора. Используемая им мощность — это мощность, теряемая при резистивном нагреве обмотки ротора. Дополнительный резистивный элемент на правом конце зависит от скольжения и сопротивления ротора. Это связано с необходимостью трансформировать схему ротора не только по соотношению витков, но и по частоте. Мощность, потребляемая в этом элементе, и есть развиваемая мощность машины.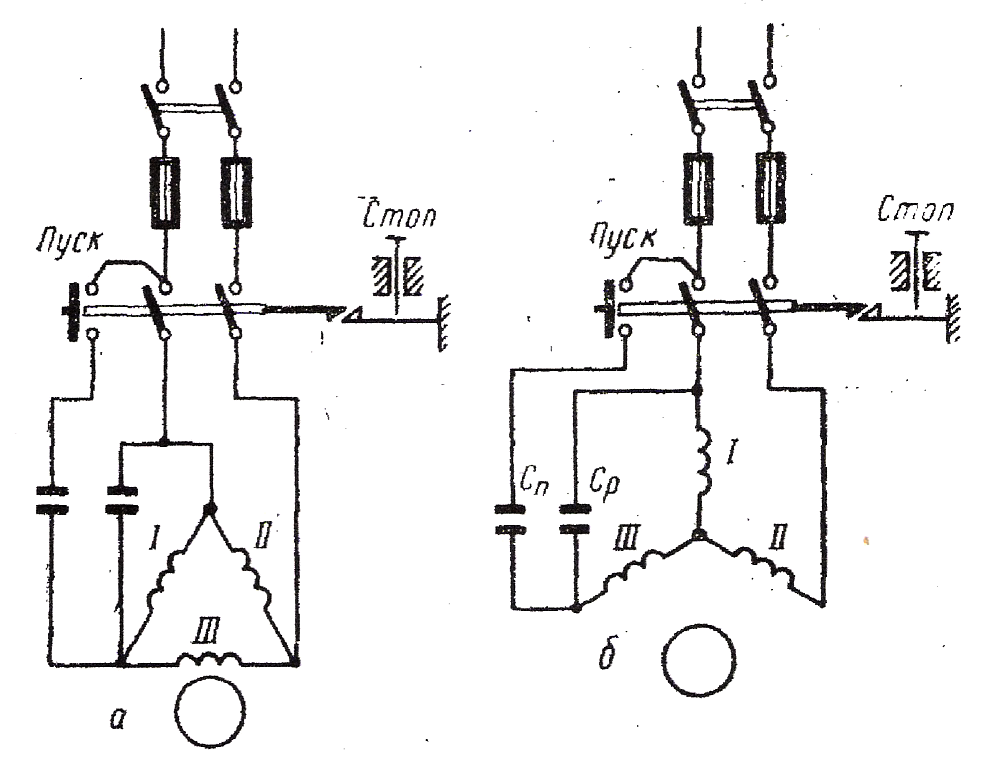
Развиваемая мощность — это мощность, преобразованная из электрической формы в механическую, и включает мощность нагрузки плюс механические потери, такие как трение и сопротивление воздуха.
Вычитание механических потерь из развиваемой мощности даст мощность на валу, которая представляет собой фактическую мощность, передаваемую нагрузке. Развиваемый крутящий момент и крутящий момент на валу можно рассчитать исходя из развиваемой мощности и мощности на валу соответственно.
Пример эквивалентной схемы асинхронного двигателя
Четырехполюсный асинхронный двигатель, 60 Гц, 460 В, 5 л.с. имеет следующие параметры эквивалентной схемы:
$ \ begin {matrix} \ begin {matrix} {{R} _ {s}} = 1.21 \ Omega & {{R} _ {r}} = 0,742 \ Omega \\\ end {matrix} & {{X} _ {s}} = 3.10 \ Omega \\ {{X} _ {r}} = 2.41 \ Omega & {{X} _ {m}} = 65.6 \ Omega \\\ end {matrix} $
Найдите пусковой ток и ток холостого хода для этой машины.
Решение
При запуске скольжение составляет 1,0, что означает, что нагрузочный резистор в эквивалентной схеме имеет короткое замыкание (1-с = 0). Сила тока будет равна напряжению, разделенному на полное сопротивление цепи. Входное сопротивление можно найти как:
Сила тока будет равна напряжению, разделенному на полное сопротивление цепи. Входное сопротивление можно найти как:
\ [{{Z} _ {in}} = \ left ({{R} _ {s}} + j {{X} _ {s}} \ right) + \ гидроразрыв {j {{X} _ {m}} \ left ({{R} _ {r}} + j {{X} _ {r}} \ right)} {{{R} _ {r}} + j {{X} _ {r}} + j {{X} _ {m}}} \]
\ [{{Z} _ {in}} = \ left (1.{o}} \]
Эквивалентная схема асинхронного двигателя
Эквивалентная цепь статора:
Модель статора асинхронного двигателя состоит из сопротивления фазной обмотки статора R 1 , реактивного сопротивления утечки фазной обмотки статора X 1 . Эти два компонента отображаются справа от модели машины. Ток холостого хода I 0 моделируется чисто индуктивным реактором X 0 с намагничивающей составляющей I µ и неиндуктивным резистором R 0 , несущим ток потерь в сердечнике I ω .
Таким образом,
Ток намагничивания в случае асинхронного двигателя выше, чем у трансформатора, потому что воздушный зазор асинхронного двигателя вызывает более высокое сопротивление.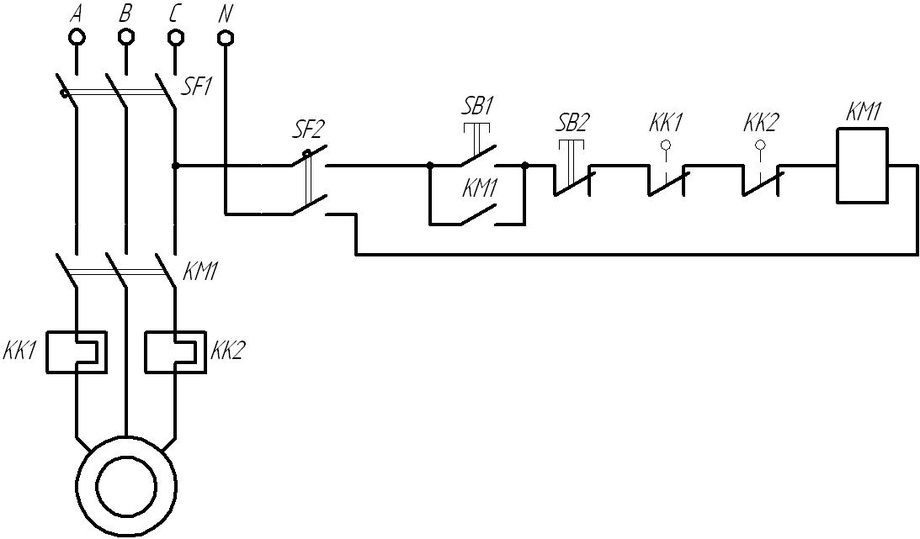
Реактивное сопротивление намагничивания X 0 в асинхронном двигателе будет иметь гораздо меньшее значение. В трансформаторе I 0 составляет от 2 до 5% номинального тока, а в асинхронном двигателе — примерно от 25 до 40% номинального тока в зависимости от размера двигателя.
Эквивалентная схема ротора:
В случае асинхронного двигателя, когда на обмотки статора подается питание 3φ, в обмотках ротора машины индуцируется напряжение. В общем, чем выше относительное движение ротора и магнитных полей статора, тем выше результирующее напряжение на роторе. Максимальное относительное движение происходит, когда ротор неподвижен, это состояние называется состоянием покоя. Это также известно как состояние заблокированного ротора или заблокированного ротора.
Если индуцированное напряжение ротора равно E 20 , то индуцированное напряжение при любом скольжении определяется выражением,
Сопротивление ротора R 2 постоянно. Это не зависит от скольжения.
Это не зависит от скольжения.
Реактивное сопротивление ротора асинхронного двигателя зависит от индуктивности ротора, частоты напряжения и тока ротора.
Если L 2 = индуктивность ротора, реактивное сопротивление ротора равно
X 2 = 2πf 2 L 2 Но f 2 = SF 1 ∴ X 2 = 2π sf 1 L 2 = s (2π f 1 L 2 ) Или X 2 = sX 20
В приведенном выше уравнении X 20 — реактивное сопротивление ротора в состоянии покоя.
Импеданс ротора равен
.Z 2s = R 2 + jX 2s Или Z 2s = R2 + jsX 20
Ток ротора на фазу равен
. В схеме, показанной выше, I 2 представляет собой ток частоты скольжения, создаваемый индуцированным напряжением sE20 частоты скольжения, действующим в цепи ротора, имеющим полное сопротивление на фазу (R 2 + jsX 20 ).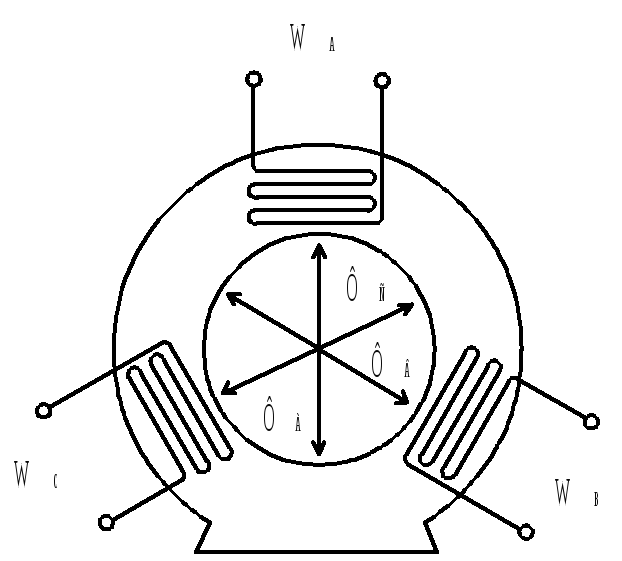
Разделив числитель и знаменатель приведенного выше уравнения на промах s, мы получим
Следует отметить, что величина и фазовый угол I2s остаются неизменными при этой операции.
Это уравнение описывает вторичную цепь фиктивного трансформатора с постоянным соотношением напряжений и одинаковой частотой на обеих сторонах. Этот фиктивный неподвижный ротор проводит тот же ток, что и реальный вращающийся ротор, и, таким образом, производит такую же волну m.m.f. Эта концепция фиктивного неподвижного ротора позволяет передавать вторичное сопротивление первичной стороне.
Однофазный асинхронный двигатель: схема работы и применение
Поскольку потребности в мощности систем с одной нагрузкой обычно невелики, все наши дома, офисы снабжены однофазным двигателем А.Только поставка. Чтобы обеспечить надлежащие условия работы при использовании этого однофазного источника питания, необходимо использовать совместимые двигатели. Помимо совместимости, двигатели должны быть экономичными, надежными и простыми в ремонте.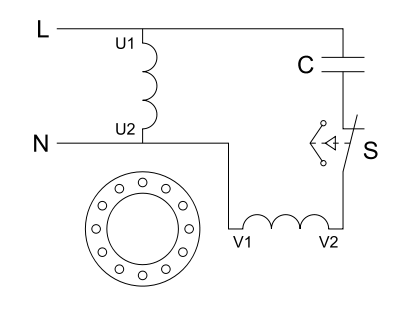 Все эти характеристики легко найти в однофазном асинхронном двигателе. Подобно трехфазным двигателям, но с некоторыми модификациями, однофазные асинхронные двигатели являются отличным выбором для бытовой техники. Их простой дизайн и низкая стоимость привлекли множество приложений.
Все эти характеристики легко найти в однофазном асинхронном двигателе. Подобно трехфазным двигателям, но с некоторыми модификациями, однофазные асинхронные двигатели являются отличным выбором для бытовой техники. Их простой дизайн и низкая стоимость привлекли множество приложений.
Однофазный асинхронный двигатель Определение
Однофазный асинхронный двигатель — это простые двигатели, которые работают от однофазного А.C. и в котором крутящий момент создается из-за индукции электричества, вызванного переменными магнитными полями. Однофазные асинхронные двигатели бывают разных типов в зависимости от условий запуска и различных факторов. Это-
1). Двигатели с расщепленной фазой.
- Двигатели с резистивным пуском.
- Двигатели емкостные пусковые.
- Двигатель с постоянным разделенным конденсатором.
- Двухзначный конденсаторный двигатель.
2). Асинхронные двигатели с расщепленными полюсами.
3).Асинхронный двигатель с резистивным пуском.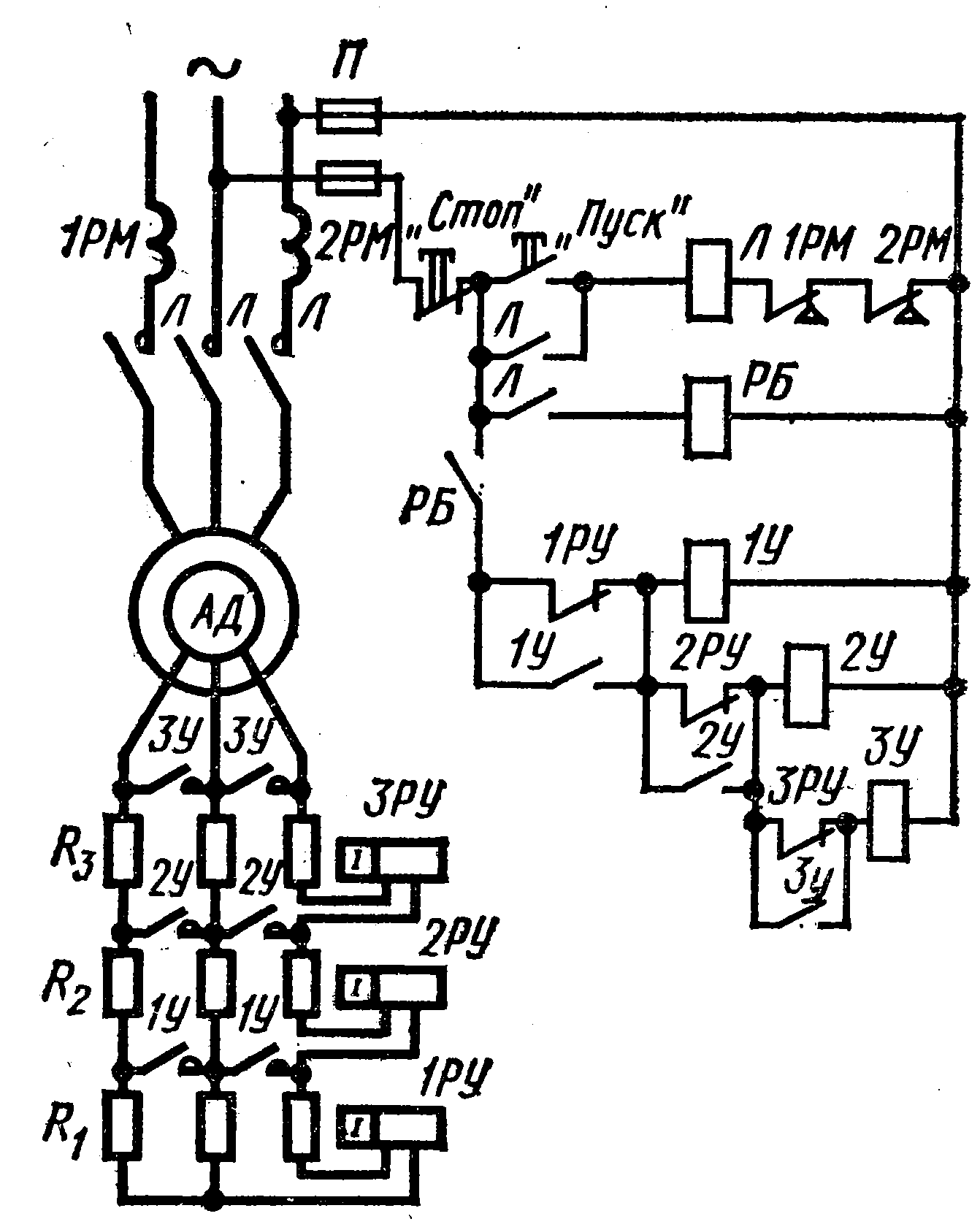
4). Отталкивание — пуск асинхронного двигателя.
Конструкция однофазного асинхронного двигателя
Основными частями однофазного асинхронного двигателя являются статор, ротор и обмотки. Статор — это неподвижная часть двигателя, на которую подается переменный ток. Статор содержит два типа обмоток. Одна — основная обмотка, другая — вспомогательная. Эти обмотки размещены перпендикулярно друг другу. К вспомогательной обмотке параллельно подключен конденсатор.
Поскольку источник переменного тока используется для работы однофазного асинхронного двигателя, необходимо учитывать определенные потери, такие как — потери на вихревые токи, потери на гистерезис. Для устранения потерь на вихревые токи статор имеет пластинчатую штамповку. Для уменьшения потерь на гистерезис эти штамповки обычно изготавливают из кремнистой стали.
Ротор — это вращающаяся часть двигателя. Здесь ротор похож на ротор с короткозамкнутым ротором. Ротор не только цилиндрический, но и имеет по всей поверхности прорези. Чтобы обеспечить плавную и стабильную работу двигателя, предотвращая магнитную блокировку статора и ротора, пазы скошены, а не параллельны.
Чтобы обеспечить плавную и стабильную работу двигателя, предотвращая магнитную блокировку статора и ротора, пазы скошены, а не параллельны.
Жилы ротора — алюминиевые или медные стержни, вставляются в пазы ротора. Торцевые кольца, изготовленные из алюминия или меди, замыкают проводники ротора. В этом однофазном асинхронном двигателе не используются контактные кольца и коммутаторы, поэтому их конструкция становится очень простой и легкой.
Эквивалентная схема однофазного асинхронного двигателя
На основе теории двойного вращающегося поля можно нарисовать эквивалентную схему однофазного асинхронного двигателя.Схема изображена в двух положениях — состояние покоя ротора состояние заблокированного ротора.
Двигатель с заблокированным ротором работает как трансформатор с короткозамкнутой вторичной обмоткой.
Эквивалентная схема однофазного асинхронного двигателя В состоянии покоя ротора два вращающихся магнитных поля имеют противоположное направление с одинаково разделенными величинами и кажутся соединенными последовательно друг с другом.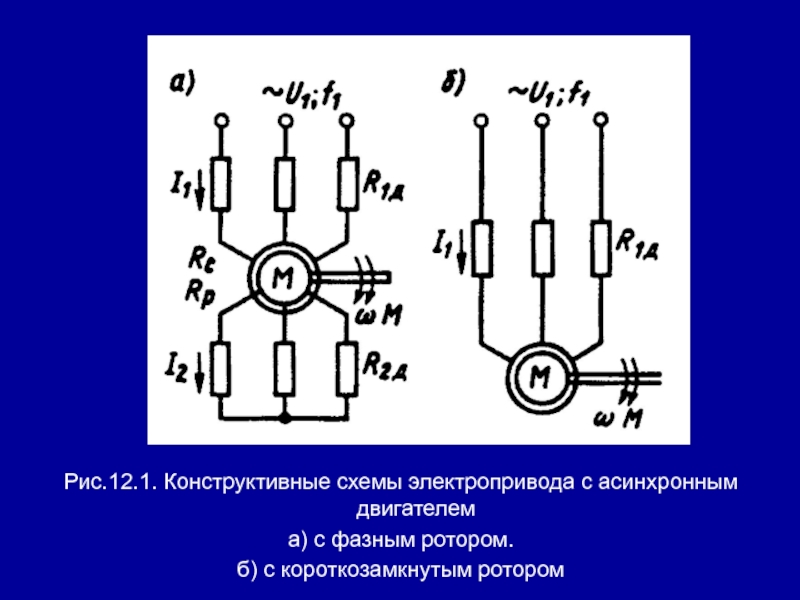 Цепь однофазного асинхронного двигателя
Цепь однофазного асинхронного двигателя
Принцип работы однофазного асинхронного двигателя
Основная обмотка однофазного асинхронного двигателя питается от однофазного А.C. ток. Это создает флуктуирующий магнитный поток вокруг ротора. Это означает, что при изменении направления переменного тока изменяется направление генерируемого магнитного поля. Этого условия недостаточно, чтобы ротор вращался. Здесь применяется принцип теории двойного вращающегося поля.
Согласно теории двойного вращающегося поля, одиночное переменное поле возникает из-за комбинации двух полей равной величины, но вращающихся в противоположном направлении. Величина этих двух полей равна половине величины переменного поля.Это означает, что при приложении переменного тока создаются два поля половинной величины с равными величинами, но вращающимися в противоположных направлениях.
Итак, теперь в статоре течет ток, а на роторе вращается магнитное поле, таким образом, закон электромагнитной индукции Фарадея действует на ротор. Согласно этому закону вращающиеся магнитные поля производят электричество в роторе, которое создает силу «F», которая может вращать ротор.
Согласно этому закону вращающиеся магнитные поля производят электричество в роторе, которое создает силу «F», которая может вращать ротор.
Почему однофазный асинхронный двигатель не запускается автоматически?
Когда к ротору применяется закон электромагнитной индукции Фарадея, индуцируется электричество и создается сила на стержнях ротора.Но согласно теории двойного вращающегося поля, существуют два магнитных поля с одинаковой величиной, но вращающиеся в противоположном направлении. Таким образом, создаются два вектора силы с одинаковой величиной, но противоположными по направлению.
Таким образом, эти векторы силы, поскольку они имеют одинаковую величину, но противоположны по направлению, не вызывают вращения ротора. Итак, однофазные асинхронные двигатели не запускаются автоматически. Мотор в таком состоянии просто гудит. Для предотвращения этой ситуации и вращения ротора необходимо приложить пусковое усилие для однофазного двигателя.Когда сила в одном направлении становится больше, чем сила в другом направлении, ротор начинает вращаться.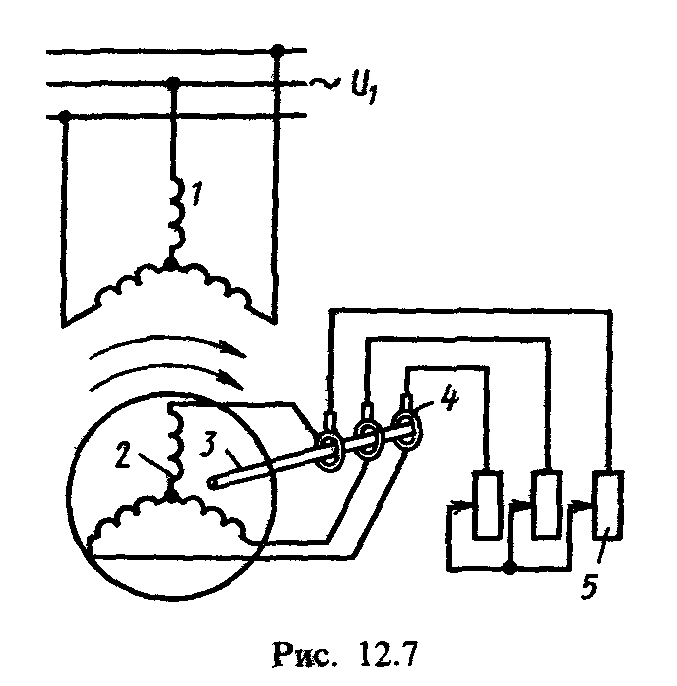 В однофазных асинхронных двигателях для этой цели используются вспомогательные обмотки.
В однофазных асинхронных двигателях для этой цели используются вспомогательные обмотки.
Способы пуска однофазного асинхронного двигателя
Однофазный асинхронный двигатель не имеет пускового момента, поэтому для обеспечения этого пускового момента требуется внешняя схема. Для этого в статоре этих двигателей имеется вспомогательная обмотка. Вспомогательная обмотка подключена параллельно конденсатору.Когда конденсатор включен, аналогично основной обмотке, на вспомогательной обмотке наблюдаются вращающиеся два магнитных поля одинаковой величины, но в противоположном направлении.
Из этих двух магнитных полей вспомогательной обмотки одно компенсирует одно из магнитных полей основной обмотки, а другое складывается с другим магнитным полем основной обмотки. Таким образом, в результате получается одно вращающееся магнитное поле большой величины. Это создает силу в одном направлении, следовательно, вращает ротор.Когда ротор начинает вращаться, он вращается, даже если конденсатор выключен.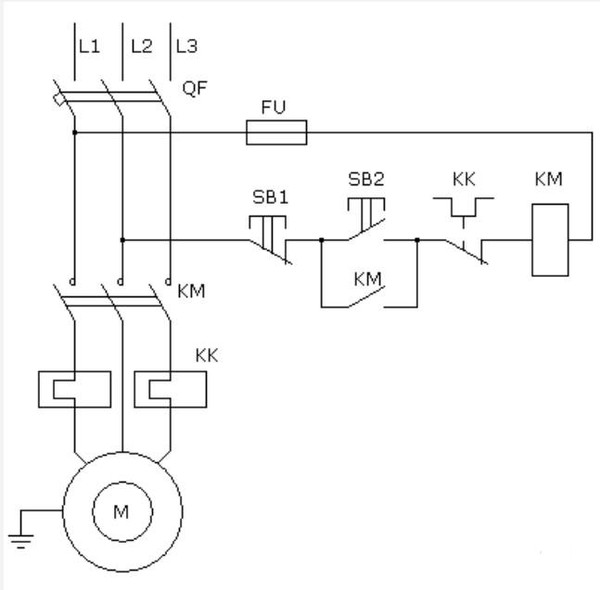
Существуют различные способы определения однофазных асинхронных двигателей. Обычно эти двигатели выбираются в зависимости от способа их запуска. Эти методы можно классифицировать как
- Пуск с расщепленной фазой.
- Запуск с расщепленными полюсами.
- Пуск отталкивающего двигателя
- Пуск с противодействием.
При двухфазном пуске статор имеет два типа обмоток — основную обмотку и вспомогательную обмотку, соединенные параллельно.Двигатели с этим типом пуска:
- Резисторные двухфазные двигатели.
- Электродвигатели с конденсаторной фазой.
- Конденсаторы запускают и запускают двигатели.
- Двигатель с конденсаторным питанием.
Однофазный индукционный двигатель с конденсаторным пуском
Его также называют конденсаторным электродвигателем с разделенной фазой. Здесь количество витков вспомогательной обмотки равно количеству витков основной обмотки. Конденсатор включен последовательно со вспомогательной обмоткой.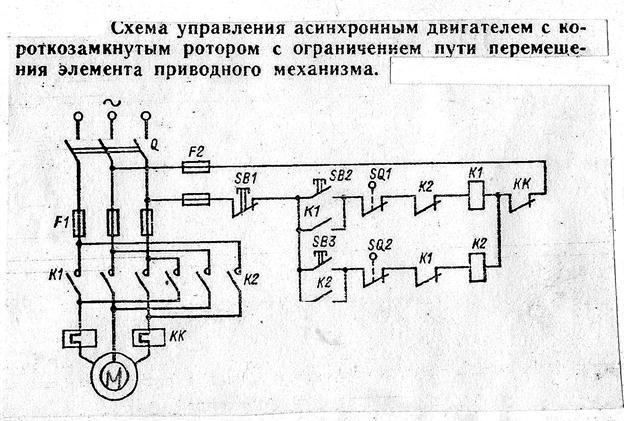 Вспомогательная обмотка отключается с помощью центробежного переключателя, когда ротор достигает 75% синхронной скорости.Двигатель продолжает ускоряться, пока не достигнет нормальной скорости.
Вспомогательная обмотка отключается с помощью центробежного переключателя, когда ротор достигает 75% синхронной скорости.Двигатель продолжает ускоряться, пока не достигнет нормальной скорости.
Номинальная мощность двигателей с конденсаторным пуском составляет от 120 до 750 Вт. Эти двигатели обычно выбирают для таких применений, как холодильники, кондиционеры и т. Д. Из-за их высокого пускового момента.
Применение однофазных асинхронных двигателей
Эти двигатели находят применение в вентиляторах, холодильниках, кондиционерах, пылесосах, стиральных машинах, центробежных насосах, инструментах, мелкой сельскохозяйственной технике, воздуходувках и т. Д.Они в основном используются для маломощных устройств с постоянной скоростью, таких как сельскохозяйственные инструменты и оборудование, где трехфазное питание недоступно. Двигатели от 1/400 кВт до 1/25 кВт используются в игрушках, фенах и т. Д.…
Таким образом, мы часто используем однофазные асинхронные двигатели в повседневной жизни.