
Двигатель постоянного тока
Двигатели постоянного тока предназначены для превращения энергии постоянного тока в механическую работу.
Электродвигатели постоянного тока, намного меньше распространены, нежели двигатели переменного тока. Это связано в первую очередь со сравнительной дороговизной, более сложным устройством, сложностями в обеспечении питания. Но, несмотря на все эти недостатки, ДПТ имеют немало плюсов. Например, двигатели переменного тока, сложно регулировать, ДПТ же отлично регулируются массой способов. Кроме того ДПТ имеют более жесткие механические характеристики и позволяют обеспечить большой пусковой момент.
Электродвигатели постоянного тока применяются в качестве тяговых двигателей, в электротранспорте, в качестве различных исполнительных устройств.
Устройство двигателей постоянного тока
Конструкция двигателя постоянного тока аналогична двигателю переменного тока, но все же имеются существенные различия.
Принцип действия
Принцип действия ДПТ основан на взаимодействии магнитных полей обмотки возбуждения и якоря. Можно представить, что вместо якоря у нас рамка, через которую протекает ток, а вместо обмотки возбуждения постоянный магнит с полюсами N и S. При протекании постоянного тока через рамку, на нее начинает действовать магнитное поле постоянного магнита, то есть рамка начинает вращаться, причем, так как направление тока не меняется, то и направление вращения рамки остается прежним.
При подаче напряжения на зажимы двигателя начинает протекать ток в обмотке якоря, на него, как мы уже знаем, начинает действовать магнитное поле машины, при этом якорь начинает вращаться, а так как якорь вращается в магнитном поле, начинает образовываться ЭДС. Эта ЭДС направлена против тока, в связи с этим её называют противоЭДС. Её можно найти по формуле
Где Ф – магнитный поток возбуждения, n – частота вращения, а Cе это конструктивный момент машины, который остается для нее постоянным.
Напряжение на зажимах больше чем противоЭДС на величину падения напряжение в якорной цепи.
А если домножить это выражение на ток, то получим уравнение баланса мощностей.
Левая часть уравнения UIя представляет собой мощность подаваемая электродвигателю, в правой части первое слагаемое EIя представляет собой электромагнитную мощность, а второе I
Рекомендуем прочесть статью — пуск двигателя постоянного тока.
Электродвигатели постоянного тока. Устройство и работа. Виды
Электрические двигатели, приводящиеся в движение путем воздействия постоянного тока, применяются значительно реже, по сравнению с двигателями, работающими от переменного тока. В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование. Питание для них подводится от мощных батарей аккумуляторов.
Устройство и принцип работыЭлектродвигатели постоянного тока по конструкции подобны синхронным двигателям переменного тока, с разницей в типе тока. В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера. Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность.
Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность.
Главной обмоткой двигателя служит якорь, на который подается питание через коллектор и щеточный механизм. Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом.
Статор может состоять из обмоток возбуждения или из постоянных магнитов. В маломощных двигателях используют постоянные магниты, а в двигателях с повышенной мощностью статор снабжен обмотками возбуждения. Статор с торцов закрыт крышками со встроенными в них подшипниками, служащими для вращения вала якоря. На одном конце этого вала закреплен охлаждающий вентилятор, который создает напор воздуха и прогоняет его по внутренней части двигателя во время работы.
Принцип действия такого двигателя основывается на законе Ампера. При размещении проволочной рамки в магнитном поле, она будет вращаться. Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками. На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение.
Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками. На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение.
Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди.
Выводы обмоток якоря объединены в один узел, называемый коллектором, выполненным в виде кольца из ламелей, закрепленных на валу якоря. При вращении вала щетки по очереди подают питание на обмотки якоря через ламели коллектора. В результате вал двигателя вращается с равномерной скоростью. Чем больше обмоток имеет якорь, тем равномернее будет работать двигатель.
Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему. В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять. Обычно удаление пыли выполняют воздухом под большим давлением.
В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять. Обычно удаление пыли выполняют воздухом под большим давлением.
Щетки требуют периодического их перемещения в пазах и продувки воздухом, так как от накопившейся пыли они могут застрять в направляющих пазах. Это приведет к зависанию щеток над коллектором и нарушению работы двигателя. Щетки периодически требуют замены из-за их износа. В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор. После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток.
ВидыЭлектродвигатели постоянного тока разделяют по характеру возбуждения:
Независимое возбуждениеПри таком характере возбуждения обмотка подключается к внешнему источнику питания. При этом параметры двигателя аналогичны двигателю на постоянных магнитах. Обороты вращения настраиваются сопротивлением обмоток якоря. Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения. При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин.
При этом параметры двигателя аналогичны двигателю на постоянных магнитах. Обороты вращения настраиваются сопротивлением обмоток якоря. Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения. При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин.
Электродвигатели с независимым возбуждением запрещается запускать без нагрузки или с небольшой нагрузкой, так как его скорость резко возрастет, и двигатель выйдет из строя.
Параллельное возбуждениеОбмотки возбуждения и ротора соединяются параллельно с одним источником тока. При такой схеме ток обмотки возбуждения значительно ниже тока ротора. Параметры двигателей становятся слишком жесткими, их можно применять для привода вентиляторов и станков.
Регулировка оборотов двигателя обеспечивается реостатом в последовательной цепи с обмотками возбуждения или в цепи ротора.
Последовательное возбуждениеВ этом случае возбуждающая обмотка подключается последовательно с якорем, в результате чего по этим обмоткам проходит одинаковый ток. Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Такая схема предусматривает применение двух обмоток возбуждения, находящихся парами на каждом полюсе двигателя. Эти обмотки можно соединять двумя способами: с суммированием потоков, либо с их вычитанием. В итоге электродвигатель может обладать такими же характеристиками, как у двигателей с параллельным или последовательным возбуждением.
Чтобы заставить двигатель вращаться в другую сторону, на одной из обмоток изменяют полярность. Для управления скоростью вращения мотора и его запуском используют ступенчатое переключение разных резисторов.
Особенности эксплуатацииЭлектродвигатели постоянного тока отличаются экологичностью и надежностью.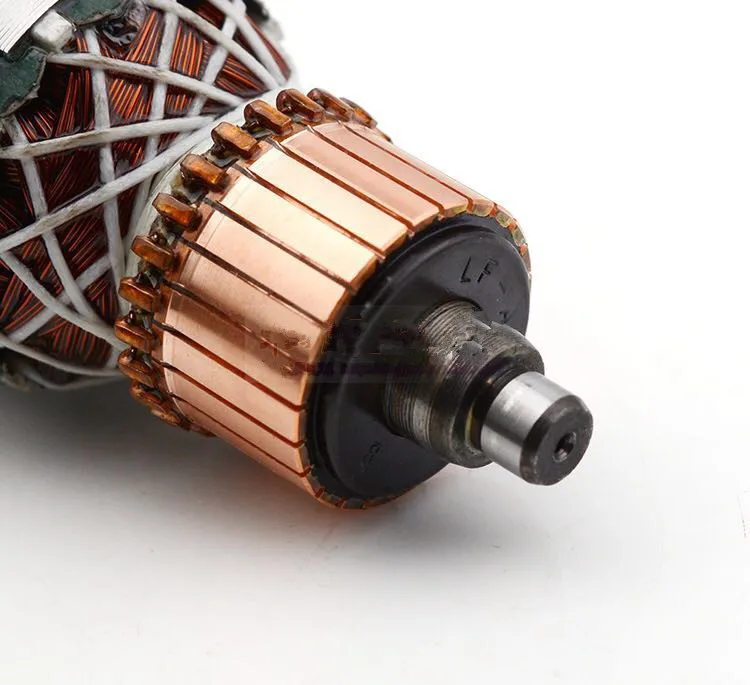 Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне.
Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне.
Такие электродвигатели постоянного тока можно также применять в качестве генератора. Изменив направление тока в обмотке возбуждения или в якоре, можно изменять направление вращения двигателя. Регулировка оборотов вала двигателя осуществляется с помощью переменного резистора. В двигателях с последовательной схемой возбуждения это сопротивление расположено в цепи якоря и позволяет уменьшить скорость вращения в 2-3 раза.
Этот вариант подходит для механизмов с длительным временем простоя, так как при работе реостат сильно нагревается. Повышение оборотов создается путем включения в цепь возбуждающей обмотки реостата.
Для моторов с параллельной схемой возбуждения в цепи якоря также применяются реостаты для уменьшения оборотов в два раза. Если в цепь обмотки возбуждения подключить сопротивление, то это позволит повышать обороты до 4 раз.
Применение реостата связано с выделением тепла. Поэтому в современных конструкциях двигателей реостаты заменяют электронными элементами, управляющими скоростью без сильного нагревания.
Поэтому в современных конструкциях двигателей реостаты заменяют электронными элементами, управляющими скоростью без сильного нагревания.
На коэффициент полезного действия мотора, работающего на постоянном токе, влияет его мощность. Слабые электродвигатели постоянного тока обладают малой эффективностью, и их КПД около 40%, в то время, как электродвигатели мощностью 1 МВт могут обладать коэффициентом полезного действия до 96%.
Преимущества электродвигателей постоянного тока- Небольшие габаритные размеры.
- Легкое управление.
- Простая конструкция.
- Возможность применения в качестве генераторов тока.
- Быстрый запуск, особенно характерный для моторов с последовательной схемой возбуждения.
- Возможность плавной регулировки скорости вращения вала.
- Для подключения и эксплуатации необходимо приобретать специальный блок питания постоянного тока.
- Высокая стоимость.

- Наличие расходных элементов в виде медно-графитных быстроизнашивающихся щеток, изнашивающегося коллектора, что значительно снижает срок эксплуатации, и требует периодического технического обслуживания.

Широко популярными двигатели постоянного тока стали в электрическом транспорте. Такие двигатели обычно входят в конструкции:
- Электромобилей.
- Электровозов.
- Трамваев.
- Электричек.
- Троллейбусов.
- Подъемно-транспортных механизмов.
- Детских игрушек.
- Промышленного оборудования с необходимостью управлением скорости вращения в большом диапазоне.
Похожие темы:
|
Электрический двигатель – неоценимое изобретение человека. Благодаря этому устройству наша цивилизация за последние сотни лет ушла далеко вперёд. Это настолько важно, что принцип работы электродвигателя изучают ещё со школьной скамьи. Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта). При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора. Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное. Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко. Что касается электрической то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления. • Скачать лекцию: двигатели постоянного тока
Свежие записи: |






Устройство электродвигателя постоянного тока
Электрический двигатель – это электрическая машина, предназначенная для преобразования электрической энергии, поступающей от источника тока в механическую энергию. Часть потребляемой электроэнергии расходуется на перемагничивание ферромагнетиков, преодоление электрического сопротивления и силы трения, что сопровождается образованием тепла.
Часть потребляемой электроэнергии расходуется на перемагничивание ферромагнетиков, преодоление электрического сопротивления и силы трения, что сопровождается образованием тепла.
Электродвигатель, работающий от источника постоянного тока, называют двигателем постоянного тока. В зависимости от особенностей конструкции электрические двигатели постоянного тока подразделяются на коллекторные и бесколлекторные. Рассмотрим устройство двигателя постоянного тока на примере изделия коллекторной конструкции. Основные элементы электродвигателя постоянного тока: статор, ротор, коллектор и токопроводящие щетки.
Статор, он же индуктор, – неподвижная часть машины, в большинстве вариантов исполнения – внешняя. Статор состоит из станины и магнитных полюсов. В зависимости от конструкции двигателя на статоре могут устанавливаться постоянные магниты, электромагниты с обмотками возбуждения или короткозамкнутые обмотки. Кроме основных магнитных полюсов на статоре могут устанавливаться дополнительные полюса. Статор необходим для создания магнитного потока в системе.
Статор необходим для создания магнитного потока в системе.
Подвижная вращающаяся часть машины, как правило, внутренняя – ротор или якорь. Ротор электродвигателя постоянного тока состоит из многочисленных катушек с токопроводящими обмотками, по которым проходит электрический ток. Количество катушек в конструкции ротора может достигать нескольких десятков. Таким образом частично устраняется неравномерность крутящего момента, уменьшается коммутируемый ток, обеспечивается оптимальное взаимодействие магнитных полей статора и ротора.
Щеточно-коллекторный узел представляет собой связующее звено между ротором и статором. В коллекторе объединены выводы всех катушек ротора. Этот узел служит переключателем тока со скользящими контактами и дополнительно выполняет функции датчика углового положения ротора.
Щетки – неподвижные контакты, подводящие ток к ротору. Чаще всего в двигателях применяются медно-графитовые и графитовые щетки. При вращении ротора происходит замыкание и размыкание контактов коллектора.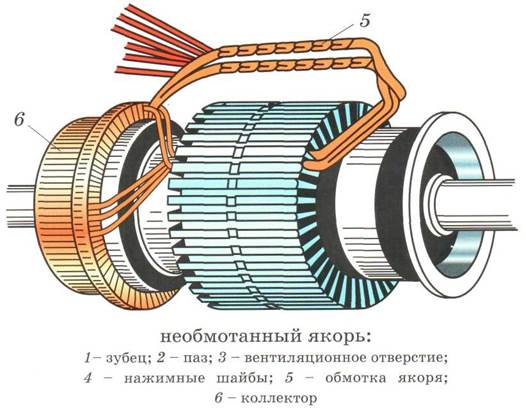 При этом в обмотках ротора происходят переходные процессы, приводящие к искрению. Искрение и трение при работе двигателя постоянного тока приводят к тому, что щеточно-коллекторный узел является самым уязвимым элементом конструкции. Для уменьшения искрения чаще всего используется установка дополнительных полюсов. Порядка 25% поломок электродвигателей происходит по причине неисправности щеточно-коллекторного узла. В некоторых областях применения электродвигателей постоянного тока поломки по причине износа щеточно-коллекторного узла составляют свыше 60% от общего количества.
При этом в обмотках ротора происходят переходные процессы, приводящие к искрению. Искрение и трение при работе двигателя постоянного тока приводят к тому, что щеточно-коллекторный узел является самым уязвимым элементом конструкции. Для уменьшения искрения чаще всего используется установка дополнительных полюсов. Порядка 25% поломок электродвигателей происходит по причине неисправности щеточно-коллекторного узла. В некоторых областях применения электродвигателей постоянного тока поломки по причине износа щеточно-коллекторного узла составляют свыше 60% от общего количества.
При подаче тока на ротор, помещенный в магнитное поле статора, в системе возникает момент силы, под действием которого ротор начинает вращаться. Направление вращения ротора зависит от направления тока. Чтобы ротор вращался в одном и том же направлении, направление тока в нем должно оставаться постоянным. Это условие выполняется с помощью коллекторного узла. Механическая энергия вращения ротора передается другим механизмам посредством присоединенного к ротору шкива и ременной передачи.
Двигатели постоянного тока — Устройство, принцип действия электродвигателя
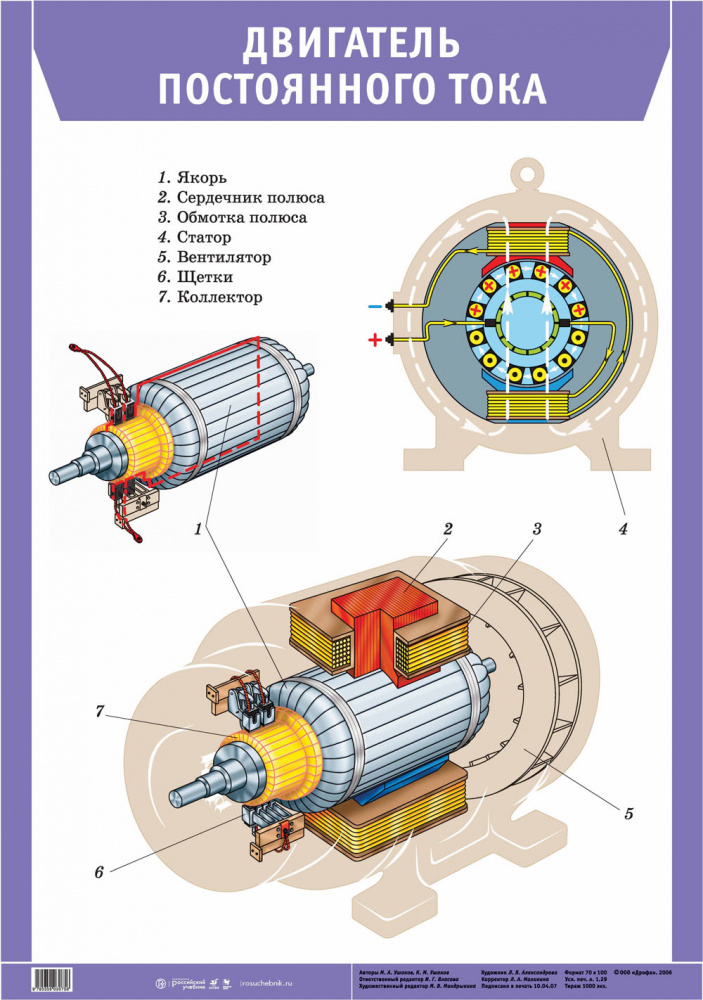
Электрическая машина постоянного тока состоит из статора, якоря, коллектора, щеткодержателя и подшипниковых щитов (рисунок 1). Статор состоит из станины (корпуса), главных и добавочных полюсов, которые имеют обмотки возбуждения. Эту неподвижную часть машины иногда называют индуктором. Главное его назначение — создание магнитного потока. Станина изготавливается из стали, к ней болтами крепятся главные и добавочные полюса, а также подшипниковые щиты. Сверху на станине имеются кольца для транспортирования, снизу — лапы для крепления машины к фундаменту. Главные полюса машины набираются из листов электротехнической стали толщиной 0,5 -1 мм с целью уменьшения потерь, которые возникают из-за пульсаций магнитного поля полюсов в воздушном зазоре под полюсами. Стальные листы сердечника полюса спрессованы и скреплены заклепками.
Рисунок 1 – Машина постоянного тока:
I — вал; 2 — передний подшипниковый щит; 3 — коллектор; 4 — щеткодержатель; 5 — сердечник якоря с обмоткой; б — сердечник главного полюса; 7 — полюсная катушка; 8 — станина; 9 — задний подшипниковый щит; 10 — вентилятор; 11 — лапы; 12 — подшипник
Рисунок 2 – Полюса машины постоянного тока:
а — главный полюс; б — дополнительный полюс; в — обмотка главного полюса; г — обмотка дополнительного полюса; 1 — полюсный наконечник; 2 — сердечник
В полюсах различают сердечник и наконечник (рисунок 2). На сердечник надевают обмотку возбуждения, по которой проходит ток, создавая магнитный поток. Обмотка возбуждения наматывается на металлический каркас, оклеенный электрокартоном (в больших машинах), или размещается на изолированном электрокартоном сердечнике (малые машины). Для лучшего охлаждения катушку делят на несколько частей, между которыми оставляют вентиляционные каналы. Добавочные полюса устанавливаются между главными. Они служат для улучшения коммутации. Их обмотки включаются последовательно в цепь якоря, поэтому проводники обмотки имеют большое сечение.
На сердечник надевают обмотку возбуждения, по которой проходит ток, создавая магнитный поток. Обмотка возбуждения наматывается на металлический каркас, оклеенный электрокартоном (в больших машинах), или размещается на изолированном электрокартоном сердечнике (малые машины). Для лучшего охлаждения катушку делят на несколько частей, между которыми оставляют вентиляционные каналы. Добавочные полюса устанавливаются между главными. Они служат для улучшения коммутации. Их обмотки включаются последовательно в цепь якоря, поэтому проводники обмотки имеют большое сечение.
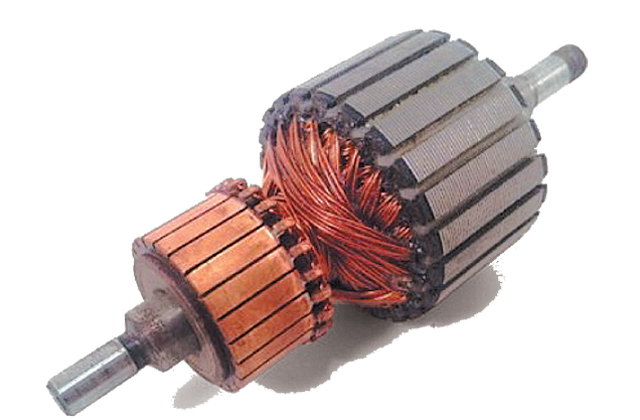
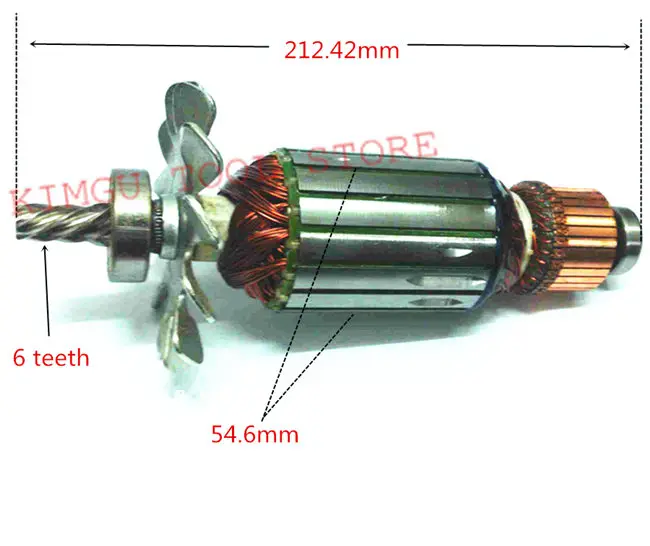
Якорь машины постоянного тока состоит из вала, сердечника, обмотки и коллектора. Сердечник якоря собирается из штампованных листов электротехнической стали толщиной 0,5 мм и спрессовывается с обеих сторон с помощью нажимных шайб. В машинах с радиальной системой вентиляции листы сердечника собираются в отдельные пакеты толщиной 6-8 см, между которыми делают вентиляционные каналы шириной 1 см. При осевой вентиляции в сердечнике выполняют отверстие для прохождения воздуха вдоль вала.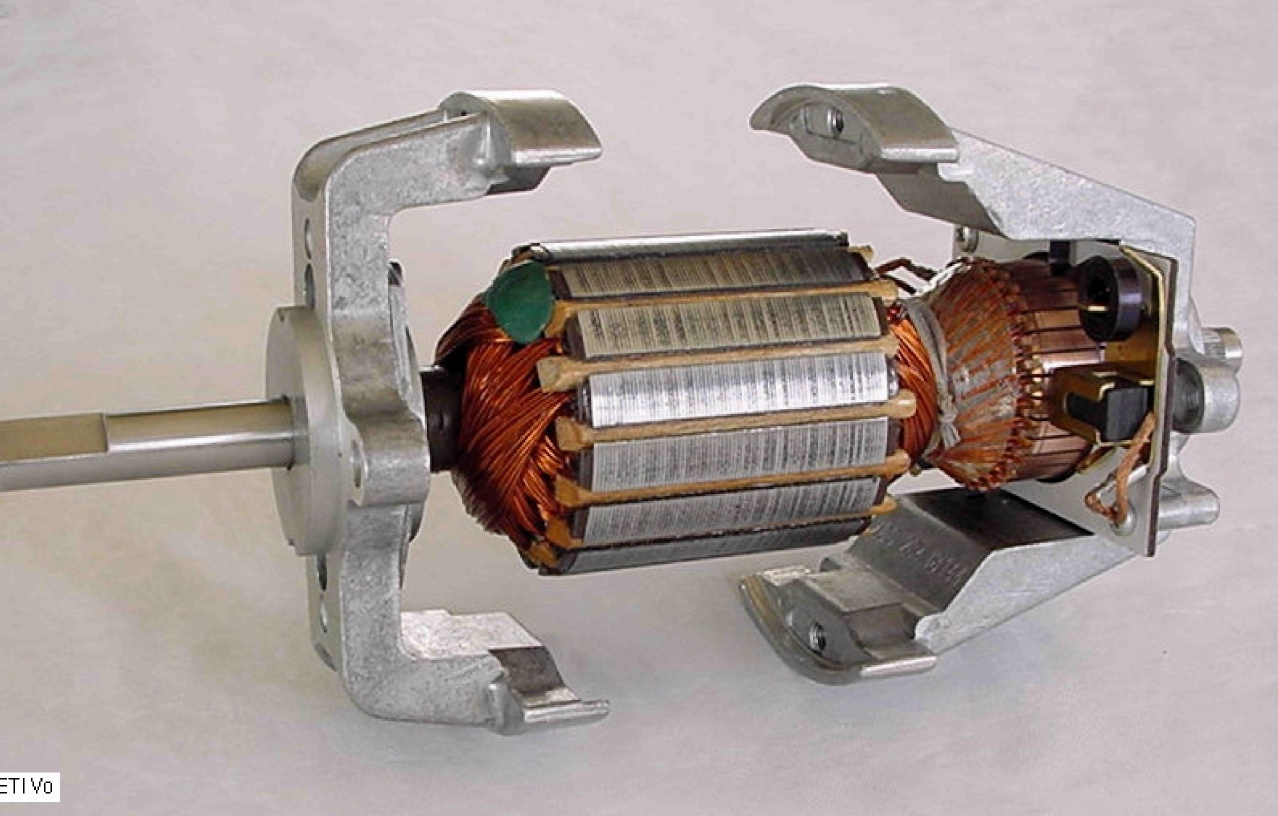 На внешней поверхности якоря имеются пазы для обмотки.
На внешней поверхности якоря имеются пазы для обмотки.
Рисунок 3 – Расположение секции обмотки якоря в пазах сердечника
Обмотка якоря изготавливается из медных проводов круглого или прямоугольного сечения в виде заранее выполненных секций (рисунок 3). Они укладываются в пазы, где тщательно изолируются. Обмотку делают двухслойной: размещают в каждом пазу две стороны разных якорных катушек — одну над другой. Обмотку закрепляют в пазах клиньями (деревянными, гетинаксовыми или текстолитовыми), а лобовые части крепят специальным проволочным бандажом. В некоторых конструкциях клинья не применяют, а обмотку крепят бандажом. Бандаж изготовляют из немагнитной стальной проволоки, которая наматывается с предварительным натяжением. В современных машинах для бандажировки якорей используют стеклянную ленту.
Коллектор машины постоянного тока собирается из клиноподобных пластин холоднокатаной меди. Пластины изолируют одну от другой прокладками из коллекторного миканита толщиной 0,5 — 1 мм. Нижние (узкие) края пластин имеют вырезы в виде ‘ласточкина хвоста’, которые служат для крепления медных пластин и миканитовой изоляции. Коллекторы крепят нажимными конусами двумя способами: при одном из них усилие от зажима передается только на внутреннюю поверхность ‘ласточкина хвоста’, при втором — на ‘ласточкин хвост’ и конец пластины.
Нижние (узкие) края пластин имеют вырезы в виде ‘ласточкина хвоста’, которые служат для крепления медных пластин и миканитовой изоляции. Коллекторы крепят нажимными конусами двумя способами: при одном из них усилие от зажима передается только на внутреннюю поверхность ‘ласточкина хвоста’, при втором — на ‘ласточкин хвост’ и конец пластины.
Коллекторы с первым способом крепления называют арочными, со вторым — клиновыми. Наиболее распространены арочные коллекторы.
В коллекторных пластинах со стороны якоря при небольшой разнице в диаметрах коллектора и якоря делают выступы, в которых фрезеруют прорези (шлицы). В них укладывают концы обмотки якоря и припаивают оловянистым припоем. При большой разнице в диаметрах припайка к коллектору делается с помощью медных полосок, которые называются ‘петушками’.
В быстроходных машинах большой мощности для предотвращения выпучивания пластин под действием центробежных сил применяют внешние изолированные бандажные кольца.
Щеточный аппарат состоит из траверсы, щеточных пальцев (болтов), щеткодержателей и щеток.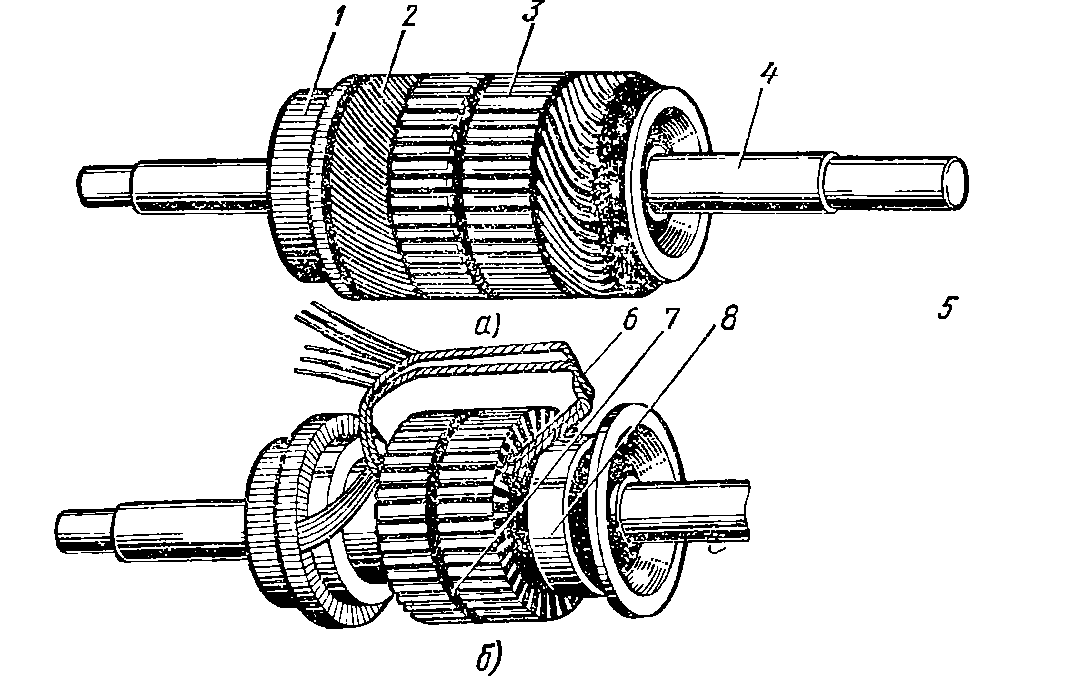 Траверса предназначена для крепления на ней щеточных пальцев щеткодержателей, образующих электрическую цепь.
Траверса предназначена для крепления на ней щеточных пальцев щеткодержателей, образующих электрическую цепь.
Щеткодержатель состоит из обоймы, в которую помещается щетка, рычага для прижима щетки к коллектору и пружины. Давление на щетку составляет 0,02 — 0,04 МПа.
Для соединения щетки с электрической цепью имеется гибкий медный тросик.
В машинах малой мощности применяют трубчатые щеткодержатели, которые крепят в подшипниковом щите. Все щеткодержатели одной полярности соединяются между собой сборными шинами, которые подключаются к выводам машины.
Щетки (рисунок 4) в зависимости от состава порошка, способа изготовления и физических свойств разделяют на шесть основных групп: угольно-графитовые, графитовые, электрографитовые, медно-графитовые, бронзографитовые и серебряно-графитовые.
Подшипниковые щиты электрической машины служат в качестве соединительных деталей между станиной и якорем, а также опорной конструкцией для якоря, вал которого вращается в подшипниках, установленных в щитах.
Рисунок 4 – Щетки:
а — для машин малой и средней мощности; б — для машин большой мощности; 1 — щеточный канатик; 2 — наконечник
Различают обычные и фланцевые подшипниковые щиты.
Подшипниковые щиты изготовляют из стали (реже из чугуна или алюминиевых сплавов) методом литья, а также сварки или штамповки. В центре щита делается расточка под подшипник качения: шариковый или роликовый. В машинах большой мощности в ряде случаев используют подшипники скольжения.
В последние годы статор двигателей постоянного тока собирают из отдельных листов электротехнической стали. В листе одновременно штампуются ярмо, пазы, главные и добавочные полюса.
Общие сведения о двигателях постоянного тока
Принцип действия (на примере двигателя параллельного возбуждения). Если к двигателю подведено напряжение U, то по цепи возбуждения протекает ток Iв, а по цепи якоря – ток Iя. Ток возбуждения создает МДС Fв = Iв Wв, которая возбуждает в машине магнитный поток Фв. Ток якоря, в свою очередь, создает магнитный поток реакции якоря Фя. Результирующий магнитный поток Фрез = Фв + Фя.
Ток якоря, в свою очередь, создает магнитный поток реакции якоря Фя. Результирующий магнитный поток Фрез = Фв + Фя.
Рис.1.23 Рис. 1.24
В цепи якоря ток Iя создает падение напряжения Rя Iя. В соответствии с законом электромагнитной силы ЭМС при взаимодействии тока Iя и магнитного потока Фрез создается вращающий момент Мвр. В установившемся режиме Мвр. = Мпр. Когда проводники якоря пересекают магнитное поле Фрез, в них в соответствии с законом электромагнитной индукции ЭМИ наводится ЭДС, которая направлена против напряжения сети U.
Классификация двигателей. По схеме включения обмоток возбуждения главных полюсов двигатели постоянного тока делятся на двигатели независимого, параллельного, последовательного и смешанного возбуждения.
В двигателях независимого возбуждения обмотка возбуждения питается от отдельного источника постоянного напряжения. В двигателях параллельного возбуждения обмотка возбуждения и обмотка якоря включены параллельно и питаются от одного источника. В двигателях последовательного и смешанного возбуждения есть обмотка возбуждения, включенная последовательно с обмоткой якоря. В двигателях малой мощности поток возбуждения может быть создан с помощью постоянных магнитов. Наибольшее применение находят двигатели параллельного и смешанного возбуждения.
Основные уравнения и величины, характеризующие двигатели. Такими величинами являются: механическая мощность на валу Р2, питающее напряжение U, ток, потребляемый из сети I, ток якоря Iя, ток возбуждения Iв, частота вращения n, электромагнитный момент Мэм. Зависимость между этими величинами описывается:
Ø уравнением электромагнитного момента:
Мэм = См Iя Ф;
Ø уравнением электрического состояния цепи якоря:
U = Епр + Rя Iя; (1. 4)
4)
Епр = СEnФ;
Ø уравнением моментов:
Мэм = Мс + Мпот + Мд,
где Мс – момент сопротивления на валу, создаваемый нагрузкой; Мпот – момент потерь, создаваемый всеми видами потерь в двигателе; Мд – динамический момент, создаваемый инерционными силами;
Характеристики двигателей. Важнейшей из характеристик является механическая n (Мс) – зависимость частоты вращения n от момента на валу (далее индекс «с» опускается) при U = const, Iв = const. Она показывает влияние механической нагрузки (момента) на валу двигателя на частоту вращения, что особенно важно знать при выборе и эксплуатации двигателей. Другие характеристики двигателей: регулировочная n (Iв), скоростная n (Iя), рабочие М, Р1, n , I, h(Р2) – здесь подробно не рассматриваются.
Механические характеристики могут быть естественными и искусственными. Под естественными характеристиками понимаются характеристики, снятые при отсутствии в схеме каких-либо дополнительных сопротивлений, например, реостатов в цепях якоря или возбуждения, искусственными– при наличии таких сопротивлений.
Уравнение механической характеристики двигателя. Оно может быть получено из (1.1). Подставим вместо Е ее значение в (1.4), тогда
n = (U – Rя Iя)/СЕФ. (1.5)
Заменяя Iя его значением из (1.2), получаем уравнение механической характеристики:
n = (1.6)
Вид механической характеристики определяется характером зависимости потока отнагрузки двигателя, что в свою очередь зависит от схемы включения обмотки возбуждения.
Реверсирование двигателя. Под реверсированием двигателя понимают изменение направления вращения его якоря. Возможные способы реверсирования вытекают из соотношения (1.2). Если изменить направление тока якоря или потока машины, то знак, а следовательно, и направление вращающего момента изменяется. Практически это достигается переключением выводов или обмотки якоря, или обмотки возбуждения. Однако одновременное переключение выводов обеих обмоток или изменение полярности питающего двигатель напряжения (кроме двигателя независимого возбуждения) к изменению знака вращающего момента и, следовательно, к изменению направления вращения не приводит.
Возможные способы реверсирования вытекают из соотношения (1.2). Если изменить направление тока якоря или потока машины, то знак, а следовательно, и направление вращающего момента изменяется. Практически это достигается переключением выводов или обмотки якоря, или обмотки возбуждения. Однако одновременное переключение выводов обеих обмоток или изменение полярности питающего двигатель напряжения (кроме двигателя независимого возбуждения) к изменению знака вращающего момента и, следовательно, к изменению направления вращения не приводит.
Пуск в ход двигателей постоянного тока. К пуску двигателей предъявляются два основных требования: обеспечить необходимый для трогания с места и разгона якоря вращающий момент и не допустить при пуске протекания через якорь чрезмерно большого тока, опасного для двигателя. Практически возможны три способа пуска: прямой пуск, пуск при включении реостата в цепь якоря и пуск при пониженном напряжении в цепи якоря.
При прямом пуске цепь якоря включается сразу на полное напряжение.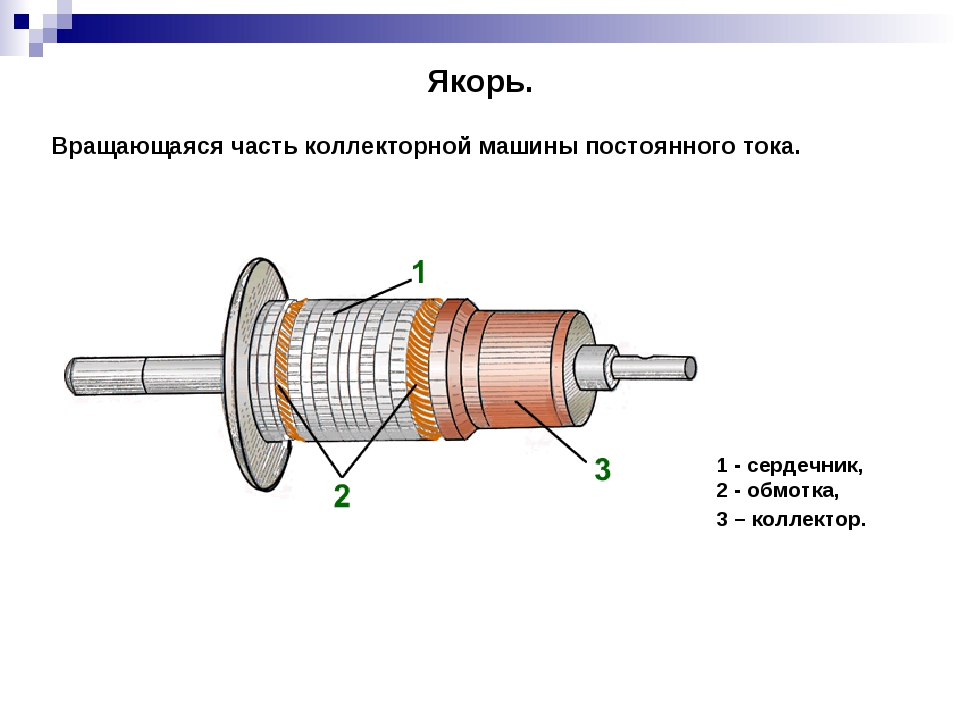 Так как в первый момент пуска якорь неподвижен (n = 0), то противо-ЭДС отсутствует (Епр = СЕ nФ). Тогда из (1.4) следует, что пусковой ток якоря Iя,п = U/Rя.
Так как в первый момент пуска якорь неподвижен (n = 0), то противо-ЭДС отсутствует (Епр = СЕ nФ). Тогда из (1.4) следует, что пусковой ток якоря Iя,п = U/Rя.
Так как Rя = 0,02 ¸ 1,10 Ом, то Iя,п = (50 ¸100) Iном, что недопустимо. Поэтому прямой пуск возможен только у двигателей малой мощности, где Iя,п (4¸6) Iном и разгон двигателя длится менее 1 с.
Пуск при включении пускового реостата Rп последовательно с якорем рассмотрим на примере схемы рис. 1.25. Пусковой ток в этом случае равен:
Iя,п = U/( Rя + Rп). (1.7)
Сопротивление Rп = U/ Iя,п – Rя выбирают таким, чтобы в начальный момент пуска, когда Епр = 0, Iя,п = (1,4¸2,5) Iном (большее число относится к двигателям меньшей мощности).
По мере разгона якоря возрастает Епр, которая снижает напряжение на якоре (т.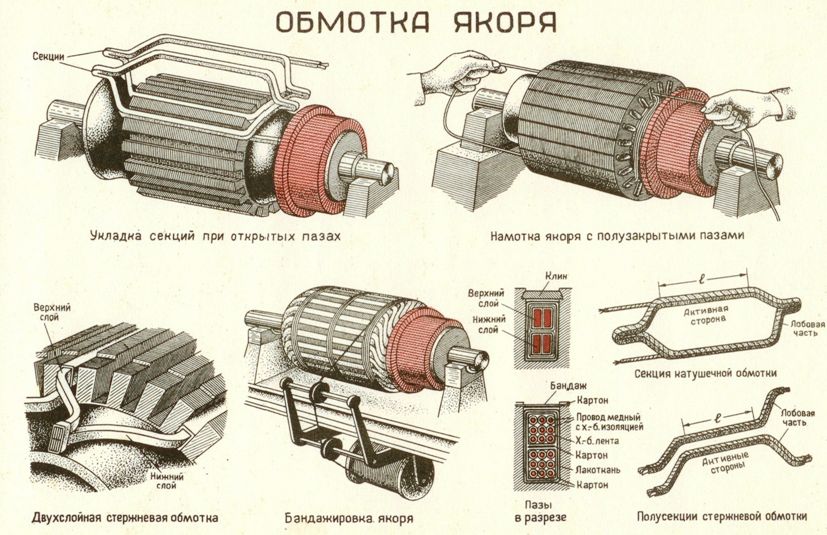 е. уменьшается числитель (1.7)), а сопротивление реостата Rп выводится.
е. уменьшается числитель (1.7)), а сопротивление реостата Rп выводится.
Перед пуском реостат Rр выводится, что необходимо для обеспечения максимального потока и, следовательно, момента при пуске (Мп = См Iя,п Ф). По мере разгона якоря реостат Rр вводится до достижения требуемой частоты вращения.
Пуск с ограниченным пусковым током возможен при питании якоря двигателя от отдельного источника (генератора, выпрямителя) с регулируемым напряжением. Ограничение пускового тока и плавный разгон двигателя обеспечиваются постепенным повышением напряжения на якоре от нуля до требуемого значения.
Рассматриваемый метод находит применение в системах управления и регулирования мощных двигателей постоянного тока (см. п.1.14.3).
Принцип Действия Двигателя Постоянного Тока: Что Нужно Знать
Мощный двигатель постоянного тока
Тема нашей сегодняшней статьи — принцип действия электродвигателя постоянного тока. Если вы бываете на нашем сайте, то наверняка уже знаете, что эту тему мы решили раскрыть более полно и понемногу разбираем все разновидности электромотором и электрогенераторов.
Если вы бываете на нашем сайте, то наверняка уже знаете, что эту тему мы решили раскрыть более полно и понемногу разбираем все разновидности электромотором и электрогенераторов.
Постоянный ток известен человечеству вот уже где-то 200 лет, эффективно применять его научились немного позже, а вот сегодня трудно себе представить деятельность человека, где бы энергия не применялась. Приблизительно таким же образом происходила и эволюция электрических двигателей.
Немного истории и теории
Первые электрические двигатели
Бурное развитие электротехники не прекращается с момента зарождения этого направления в физике. Первыми разработками, связанными с электрическими моторами, были работы многих ученых в 20-х годах 19-го столетия. Изобретали всяких мастей пытались соорудить механические машины, способные превращать электрическую энергию в кинетическую.
- Особую значимость имеют исследования М. Фарадея, который в 1821 году, проводя эксперименты по взаимодействию тока и разных проводников, выяснил, что проводник может вращаться внутри магнитного поля, ровно как вокруг проводника может вращаться и магнит.
- Второй этап развития занял более значительный отрезок времени от 1830-х до 1860-х годов. Теперь, кода основные принципы преобразования энергии человеку были известны, он пытался создать наиболее эффективную конструкцию двигателя с вращающимся якорем.
- В 1833 году американский изобретатель и по совместительству кузнец Томас Девенпорт смог построить первый роторный двигатель, работающий на постоянном токе, и сконструировать модель поезда, приводимую им в движение. На свою электрическую машину он получил патент спустя 4 года.
Б.С. Якоби
- В 1834 году Борис Семенович Якоби, русско-немецкий физик и изобретатель, создает первый в мире электродвигатель постоянного тока, в котором смог таки реализовать основной принцип работы таких машин, применяемый и сегодня – с постоянно вращающейся частью.
- В 1838 году, 13 сентября был произведен пуск настоящей лодки по Неве с 12-ю пассажирами на борту – так происходили полевые испытания двигателя Якоби. Лодка двигалась со скоростью 3 км\ч против течения. Привод двигателя был соединен с лопастными колесами по бокам, как на пароходах того времени. Электрический ток подавался к агрегату от батареи содержащей 320 гальванических элементов.
 Привод двигателя был соединен с лопастными колесами по бокам, как на пароходах того времени. Электрический ток подавался к агрегату от батареи содержащей 320 гальванических элементов.
Привод двигателя был соединен с лопастными колесами по бокам, как на пароходах того времени. Электрический ток подавался к агрегату от батареи содержащей 320 гальванических элементов.Лодка с лопастными колесами
Результатом проведенных испытаний стала возможность формирования основных принципов дальнейшего развития электромоторов:
- Во-первых, стало ясно, что расширение сферы их применения напрямую зависит от удешевления способов получения электрической энергии – требовался надежный и недорогой генератор, а не дорогостоящие на тот момент гальванические батареи.
- Во-вторых, требовалось создать достаточно компактные двигатели, которые бы, однако, обладали большим коэффициентом полезного действия.
- И в третьих – были очевидны преимущества двигателей с вращающимися неоднополюсными якорями, с постоянным вращающимся моментом.
Работа шунтового генератора
Затем наступает третий этап развития электромоторов, который ознаменован открытием явления самовозбуждения двигателя электрического тока, после чего был сформирован принцип обратимости таких машин, то есть двигатель может быть генератором, и наоборот. Теперь для того чтобы запитать двигатель начали применять недорогие генераторы тока, что в принципе делается и сегодня.
Теперь для того чтобы запитать двигатель начали применять недорогие генераторы тока, что в принципе делается и сегодня.
Интересно знать! Любая электрическая сеть подключена к электростанции, вырабатывающей ток. Сама станция, по сути, и есть набор мощнейших генераторов, приводимых в движение разными способами: течение реки, энергия ветра, ядерные реакции и прочее. Исключение составляют, разве что, фотоэлементы в солнечных батареях, но это уже другая, дорогая, пока не нашедшая достаточного распространения история.
Вид современной конструкции электродвигатель приобрел в далеком 1886 году, после чего в него вносились только доработки и усовершенствования.
Основные принципы функционирования
Двигатели постоянного тока и принцип действия: вспоминаем школьные уроки физики
В основу любого электрического двигателя положен принцип магнитного притягивания и отталкивания. В качестве эксперимента можете провести такой простейший опыт.
- Внутрь магнитного поля нужно поместить проводник, по которому нужно пропустить электрический ток.
- Для этого удобнее всего пользоваться магнитом в форме подковы, а в качестве проводника подойдет медная проволока подключенная концами к батарейке.
- В результате опыта вы увидите, что проволоку вытолкнет из области действия постоянного магнита. Почему это происходит?
- Дело в том, что при прохождении тока через проводник, вокруг последнего создается электромагнитное поле, которое вступает во взаимодействие с уже имеющимся, от постоянного магнита. Как результат этого взаимодействия, мы видим механическое движение проводника.
- Если говорить более подробно, то выглядит это так. Когда круговое поле проводника вступает во взаимодействие с постоянным от магнита, то сила магнитного поля с одной стороны возрастает, а с другой уменьшается, из-за чего провод выталкивает из области действия магнита под углом 90 градусов.

Занимательная физика
- Направление, в котором вытолкнет проводник можно установить по правилу левой руки, которое применимо только к электродвигателям. Правило гласит следующее – левую руку нужно поместить в магнитное поле так, чтобы его силовые линии входили в нее с ладони, а 4 пальца были направлены по ходу движения положительных зарядов, тогда отведенный в сторону большой палец покажет направление воздействующей на проводник движущей силы.
 Правило гласит следующее – левую руку нужно поместить в магнитное поле так, чтобы его силовые линии входили в нее с ладони, а 4 пальца были направлены по ходу движения положительных зарядов, тогда отведенный в сторону большой палец покажет направление воздействующей на проводник движущей силы.
Правило гласит следующее – левую руку нужно поместить в магнитное поле так, чтобы его силовые линии входили в нее с ладони, а 4 пальца были направлены по ходу движения положительных зарядов, тогда отведенный в сторону большой палец покажет направление воздействующей на проводник движущей силы.Эти простые принципы двигателя постоянного тока применяется и поныне. Однако в современных агрегатах вместо постоянных магнитов применяют электрические, а рамки заменяют сложные системы обмоток.
Строение двигателя
Двигатель постоянного тока и устройство
Давайте теперь более подробно разберем, как устроен двигатель постоянного тока, какие в нем имеются детали и как они взаимодействуют друг с другом.
Продолжение теории
Принцип и устройство двигателя постоянного тока
Сконструировать простейший двигатель постоянного тока вы легко сможете своими руками. Инструкция такова, что достаточно соорудить прямоугольную рамку из проводника, способную вращаться вокруг центральной оси.
- Рамка помещается в магнитное поле, после чего на ее концы подается постоянное напряжение, от той же батарейки.
- Так только по рамке начинает течь ток, она приходит в движение, пока не займет горизонтальное положение, называемое нейтральным или «мертвым», когда воздействие поля на проводник равно нулю.
- По идее, рамка должна остановиться, но этого не произойдет, так как она пройдет «мертвую» точку по инерции, а значит, электродвижущие силы снова начнут возрастать. Но из-за того, что ток теперь течет в обратном направлении относительно магнитного поля, будет наблюдать сильный эффект торможения, что несопоставимо с нормальной работой двигателя.
- Чтобы процесс протекал нормально нужно предусмотреть такую конструкцию подключения рамки к питанию, при которой в момент прохождения тока через нулевую точку будет происходить переключение полюсов, а значит, относительно магнитного поля ток потечет в прежнем направлении.
В качестве такого устройства применяется коллектор, состоящий их изолированных пластин, но давайте поговорим о нем чуть позже.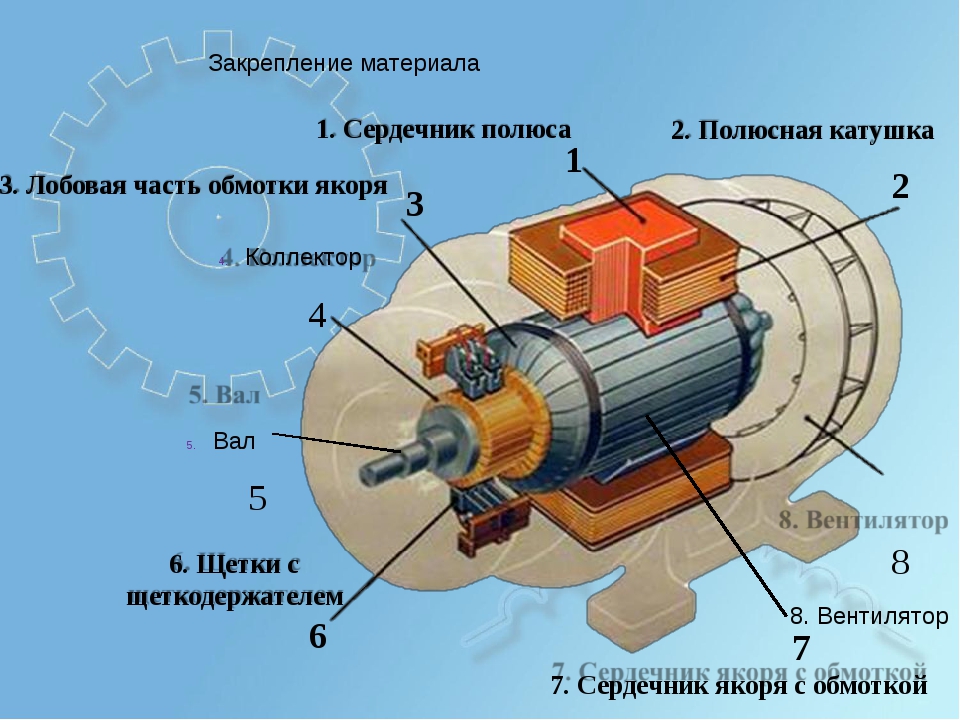
В виде альтернативы можно изготовить такую рамку, что показана на фото выше. Ее отличие в том, что по двум контурам рамки ток протекает в одном направлении, что позволяет избавиться от коллектора, однако такой электромотор крайне неэффективен, из-за постоянно воздействующих тормозящих сил.
Получив вращение ротора, к нему можно приладить привод и дать сопоставимую мощности двигателя нагрузку, получая тем самым работающую модель.
Строение электромотора постоянного тока
Каково устройство электродвигателя постоянного тока
Итак, переходим к строению двигателей:
- Статор или индуктор – неподвижная часть двигателя, представляющая собой деталь, создающую постоянное электромагнитное поле. Состоит статор из сердечника, выполненного из тонколистовой стали (из пластин определенного профиля набирается деталь нужного размера) и обмотки.
Принцип действия и устройство двигателя постоянного тока: статор
- Обмотка укладывается в пазы сердечника определенным образом, формируя основные и добавочные магнитные полюса, естественно, при включении в сеть.
- Обмотка возбуждения находится на главных полюсах, тогда как на добавочных она служит для улучшения коммутации – увеличивает эффективность мотора, его КПД.
Якорь двигателя постоянного тока
- Ротор двигателя, являющийся тут якорем, тоже имеет похожее строение, но отличает его, прежде всего то, то данный узел двигателя является подвижным. Именно он заменяет вращающуюся рамку из примеров, рассмотренных выше.
- Витки обмотки якоря изолированы друг от друга и соединяются с контактными пластинами коллектора, через которые и подается питание.
- Все части ротора закреплены на металлическом валу, который является центральной осью вращения двигателя. К нему же и подключается привод, передающий крутящий момент на внешние механизмы.
Вид коллектора
- Коллектор (полосатый цилиндр, насаженный на вал) соединен с питающей сетью через щетки, которые выполняются чаще всего из графита. Вообще строение коллектора таково, что контактные пластины также изолированы, что позволяет эффективно менять направление тока в цепи, чтобы избегать торможения двигателя.
- Сами щетки имеют скользящий контакт с пластинами коллектора, и удерживаются в одном положении при помощи щеткодержателей. Поддерживать постоянное напряжение контакта (а ведь мы знаем, что щетки истираются и истончаются) помогают пружины.
Графитовые щетки
- Щетки соединены медными проводами с питающей сетью. Дальше начинается внешняя схема электропитания и управления, о которой мы поговорим немного позже.
Валовый подшипник качения
- Следом за коллектором на валу располагается подшипник качения, обеспечивающий плавное вращение. Сверху он защищен специальным полимерным кольцом, защищающим его от пыли.
Совет! Одной из частых поломок электрических двигателей, является выход из строя подшипника. Если вовремя не заменить этот небольшой элемент конструкции, то запросто можно спалить весь двигатель.
- С обратной стороны обмотки, на том же валу, располагается крыльчатка, поток воздуха от которой эффективно охлаждает двигатель.
- Следом за крыльчаткой обычно крепится привод, отличающийся параметрами, в зависимости от назначения агрегата, в котором двигатель постоянного тока установлен.

В принципе, на этом все. Как видите, конструкция достаточно проста, и что немаловажно, очень эффективна.
Особенности коллекторных двигателей
Перфоратор в разрезе: такие двигатели универсальны и могут работать как от постоянного, так и от переменного тока, но только при соответствующем подключении
Вообще коллекторный двигатель – это действительно хорошее устройство. Такие агрегаты легчайшим образом поддаются регулировке. Повысить, опустить обороты – не проблема. Дать четкий крутящий момент или жесткую механическую характеристику – запросто.
Однако, несмотря на ряд неоспоримых преимуществ, двигатель имеет повышенную сложность сборки, относительно двигателей переменного тока с самовозбуждающимся ротором или других бесколлекторных агрегатов, а также меньшую надежность. И вся загвоздка состоит в этом самом коллекторе.
- Этот узел достаточно дорог, а цена его ремонта иной раз сопоставима с новой деталью, если вообще возможность восстановления имеется.
- Он забивается при работе токопроводящей пылью, что со временем может стать причиной выхода из строя всего двигателя.
- Коллектор искрит, создавая при этом помехи, а при высокой нагрузке так и вовсе может полыхнуть, создавая круговой огонь. В таком случае его закоротит дугой, что несовместимо с жизнью двигателя.
Выше мы уже сказали, что его задача менять направление тока в витках обмотки, а теперь хотим разобрать вопрос подробнее.
Все гениальное просто
- Итак, по сути, данная часть ротора служит выпрямителем тока, то есть переменный ток становится, проходя через него, постоянным, что справедливо для генераторов, или меняет направление тока, если речь идет о двигателях.
- В случае рассмотренного выше примера с вращающейся в магнитном поле рамкой, требовался коллектор, состоящий из двух изолированных полуколец.
- Концы рамки подключаются к разным полукольцам, что не позволяет цепи накоротко замкнуться.
- Как мы помним, коллектор контактирует с щетками, которые установлены таким образом, чтобы они одновременно не контактировали друг с другом и меняли полукольца при прохождении рамкой нулевой точки.
Работа коллектора
Все предельно просто, однако такие двигатели и генераторы не могут быть нормальной мощности в силу конструктива. В результате якорь стали делать с множеством витков, чтобы активные проводники всегда находились максимально близко к полюсам магнита, ведь, вспоминая закон электромагнитной индукции, становится ясно, что именно это положение самое эффективное.
Раз увеличивается количество витков, значит, требуется разбить коллектор на большее число частей, что собственно и является причиной сложности изготовления и дороговизны этого элемента.
Альтернатива коллекторному двигателю
Бесщеточный двигатель постоянного тока
В электронике уже давно царит век полупроводников, что позволяет изготавливать надежные и компактные микросхемы. Так зачем же мы до сих пор пользуемся коллекторными двигателями? А действительно?
Так зачем же мы до сих пор пользуемся коллекторными двигателями? А действительно?
- Инженеры тоже не оставили вопрос незамеченным. В результате коллектор сменили силовые ключи, дополнительно в конструкции появились датчики, регистрирующие текущее положение ротора, чтобы система автоматически определяла момент переключения обмотки.
- Как мы помним, нет никакой разницы, двигается ли магнит относительно проводника, либо же это происходит наоборот. Поэтому якорем становится статор, а на роторе располагается постоянный магнит или простейшая обмотка, соединенная с питанием через контактные кольца, который вращать внутри конструкции намного проще.
Контактные кольца в простейшем генераторе переменного тока
- Строение контактных колец чем-то напоминает коллектор, однако они намного надежнее и изготавливать их в условиях производства проще.
В итоге получился новый тип двигателя, а именно бесщеточный двигатель постоянного тока aka BLDC. Устройству доступны те же преимущества, что и коллекторному двигателю, но от надоедливого коллектора мы избавляется.
Однако такие двигатели применяются только в дорогих аппаратах, тогда как простая техника, например соковыжималка или тот же перфоратор будут рентабельнее в производстве, если ставить на них уже классические коллекторные модели двигателей.
Управление двигателем постоянного тока
Принципиальная электрическая схема управления электродвигателями постоянного тока с реверсом
Итак, как вы уже поняли, основной принцип работы двигателя постоянного тока заключается в инвертировании направления тока в якорной цепи, иначе бы возникало торможение, приводящее к стопорению мотора. Таким образом, реализуется вращение мотора в одну сторону, но такой режим не единственный, и двигатель можно заставить вращаться в обратном направлении.
Для этого достаточно поменять направление тока в возбуждающей обмотке, или сменить местами щетки, через которые подается питание на обмотку ротора.
Совет! Если сделать одновременно обе эти манипуляции, то с двигателем ничего не произойдет, и он продолжит вращаться в том же направлении, что и ранее.

Однако это не все моменты, которые требуется регулировать в таком двигателе. Когда вам требуется четко управлять оборотами такого агрегата, или организовать специальный режим управления оборотами, помимо тумблеров и переключателей в схему управления включаются более сложные элементы.
Система управления может быть по-настоящему сложной
- При этом следует учитывать следующие недостатки коллекторных двигателей: низкий момент на малых оборотах вращения двигателя, из-за чего приборам требуется редуктор, что удорожает и усложняет конструкцию; генерация сильных помех; ну и низкая надежность коллектора, про что мы писали выше.
- Также в расчет берется то, что потребление тока и скорость вращения вала зависят и от механической нагрузки на валу.
- Итак, основной параметр, определяющий скорость вращения вала – это подаваемое напряжение на обмотку, поэтому, следуя логике, для управления этим параметром применяются устройства, регулирующие выходное напряжение.
Схемы управления двигателем на базе интегральной микросхемы LM317
- Такими устройствами являются регулируемые стабилизаторы напряжения. На сегодняшний день целесообразнее использовать дешевые компенсационные интегральные стабилизаторы, типа LM Схема управления с таким устройством показана на схеме выше.
Компактный стабилизатор
- Схема довольно примитивная, но, кажется, достаточно простой, а главное эффективной и недорогой. Мы видим, что ограничение выходного напряжения регулируется дополнительным резистором, обозначенным как Rlim, расчет сопротивления которого имеется в спецификации. При этом стоит понимать, что он ухудшает характеристику всей схемы, как стабилизатора.
- Мы видим, что представлено два варианты схемы, какая из них будет показывать себя лучше? Вариант «а» выдает линейную характеристику удобного регулирования, благодаря чему очень популярен.
- Вариант «б», наоборот», характеристику имеет нелинейную. Фактическая разница будет заметна при выходе из строя переменного резистора: в первом случае мы получим максимальную скорость вращения, а во втором – наоборот, минимальную.

Не будем больше углубляться в дебри, так как статья у нас по большей части ознакомительная. Мы разобрали принципы действия двигателей постоянного тока, а это уже что-то. Если вопрос вас заинтересовал, то обязательно просмотрите следующее видео. А на этом мы прощаемся с вами! Всего хорошего!
Компоненты, работа и их применение
Первый якорь использовался хранителями магнитов в 19 веке. Связанные части оборудования выражаются как электрические, так и механические. Хотя эти два набора терминов определенно разделены, они обычно используются одинаково, включая один электрический термин, а также один механический термин. Это может быть причиной путаницы при работе со сложными машинами, такими как бесщеточные генераторы .В большинстве генераторов частью ротора является полевой магнит, который будет активен, что означает вращение, тогда как часть статора — это якорь, который будет неактивен. Как генераторы, так и двигатели могут быть спроектированы с неактивным якорем и активным (вращающимся) полем, в противном случае активный якорь является неактивным полем. Вал стабильного магнита, иначе электромагнита, а также подвижный металлический элемент соленоида, особенно если последний работает как переключатель или реле, можно называть якорями.В этой статье обсуждается обзор арматуры и ее работа с приложениями.
Как генераторы, так и двигатели могут быть спроектированы с неактивным якорем и активным (вращающимся) полем, в противном случае активный якорь является неактивным полем. Вал стабильного магнита, иначе электромагнита, а также подвижный металлический элемент соленоида, особенно если последний работает как переключатель или реле, можно называть якорями.В этой статье обсуждается обзор арматуры и ее работа с приложениями.
Что такое арматура?
Якорь можно определить как элемент, генерирующий энергию в электрической машине, где якорь может быть вращающейся частью, в противном случае — неподвижной частью машины. Взаимодействие якоря с магнитным потоком может осуществляться в воздушном зазоре, полевой элемент может включать в себя любые стабильные магниты, в противном случае электромагниты, которые имеют форму проводящей катушки, подобной другому якорю, который известен как электрическая машина с двойным питанием.Якорь всегда работает как проводник, наклоняясь перпендикулярно как к полю, так и к направлению движения, в противном случае — к силе. Схема якоря приведена ниже.
Схема якоря приведена ниже.
Арматура
Основная роль арматуры универсальна. Основная роль заключается в передаче тока через поле, таким образом создавая крутящий момент на валу в активной машине, иначе — в линейной машине. Вторая роль якоря заключается в создании ЭДС (электродвижущей силы) .При этом ЭДС может возникать как при относительном движении якоря, так и в поле. Поскольку машина используется в качестве двигателя, ЭДС будет противодействовать току якоря и преобразует электрическую энергию в механическую, которая имеет форму крутящего момента, и, наконец, передает ее через вал.
Всякий раз, когда машина используется как генератор, электродвижущая сила якоря управляет током якоря, а также движение вала будет изменено на электрическую энергию.В генераторе вырабатываемая мощность будет поступать от статора. Гроулер в основном используется для обеспечения арматуры, предназначенной для открытия, площадки, а также шорт.
Компоненты якоря
Якорь может быть спроектирован с таким количеством компонентов, как сердечник, обмотка, коммутатор и вал.
Сердечник
Сердечник якоря может быть спроектирован с использованием множества тонких металлических пластин, которые называются слоистыми. Толщина пластин примерно равна 0.5 мм, и это зависит от частоты, на которую будет рассчитана работа якоря. Металлические пластины штампуются при нажатии.
Они имеют круглую форму с отверстием, выбитым в сердечнике, когда вал запрессован, а также пазами, которые выбиты в области кромки, где катушки будут окончательно сидеть. Металлические пластины соединяются вместе, образуя сердечник. Сердечник может быть построен из уложенных друг на друга металлических пластин вместо использования стальной детали для получения суммы потерянной энергии при нагревании сердечника.
Потеря энергии известна как потери в железе из-за вихревых токов. Эти мельчайшие вращающиеся магнитные поля образуются в металле из-за вращающихся магнитных полей, которые могут быть обнаружены всякий раз, когда устройство работает. Если в металлических пластинах используются вихревые токи, они могут формироваться в одной плоскости, что значительно снижает потери.
Если в металлических пластинах используются вихревые токи, они могут формироваться в одной плоскости, что значительно снижает потери.
Обмотка
Перед тем, как начнется процесс намотки, прорези сердечника будут защищены от медного провода внутри прорезей, контактирующих с ламинированным сердечником.Катушки вставляются в пазы якоря, а также прикрепляются к коммутатору по-другому. Это можно сделать разными способами в зависимости от конструкции якоря.
Якоря подразделяются на два типа, а именно якорь с коленчатой обмоткой и якорь с волновой обмоткой . При намотке внахлест последний конец одной катушки прикреплен к сегменту коммутатора, а также к первичному концу соседней катушки. В волновой намотке два конца катушки будут связаны с сегментами коммутатора, которые разделены на некоторое расстояние между полюсами.
Это позволяет последовательно складывать напряжения внутри обмоток между щетками. для такой намотки нужна всего пара щеток. В первой арматуре количество дорожек равно количеству полюсов и щеток. В некоторых конструкциях якоря они будут иметь две или более разных катушек в одном слоте, прикрепленных к соседним сегментам коммутатора. Это можно сделать, если требуемое напряжение на катушке будет считаться высоким.
В первой арматуре количество дорожек равно количеству полюсов и щеток. В некоторых конструкциях якоря они будут иметь две или более разных катушек в одном слоте, прикрепленных к соседним сегментам коммутатора. Это можно сделать, если требуемое напряжение на катушке будет считаться высоким.
При распределении напряжения по трем отдельным сегментам, так как катушки будут в одном слоте, напряженность поля в слоте будет высокой, однако это уменьшит искрение на коммутаторе, а также сделает устройство более мощным. компетентный.В некоторых арматурах щели также перекручены, это достигается за счет того, что каждая пластина несколько не совпадает. Это может быть сделано для уменьшения зубчатого зацепления, а также для обеспечения перехода уровня от одного полюса к другому.
Коммутатор
Коммутатор надвигается на верхнюю часть вала и удерживается крупной накаткой, похожей на сердечник. Конструкция коммутатора может быть выполнена с использованием медных шин, а изоляционный материал будет разделять шины. Обычно этот материал представляет собой термореактивный пластик, однако в старых арматурах использовалась листовая слюда.
Обычно этот материал представляет собой термореактивный пластик, однако в старых арматурах использовалась листовая слюда.
Коммутатор должен быть точно соединен с пазами сердечника всякий раз, когда его нажимают на верхнюю часть вала, потому что провода от каждой катушки будут выходить из пазов, а также присоединяться к стержням коммутатора. Для эффективной работы магнитной цепи важно, чтобы катушка якоря имела точное угловое смещение от стержня коллектора, к которому она прикреплена.
Вал
Вал якоря представляет собой твердый стержень одного типа, установленный между двумя подшипниками, которые описывают оси компонентов, размещенных на нем. Он должен быть достаточно широким, чтобы передавать крутящий момент, необходимым для двигателя, и жестким, чтобы контролировать некоторые силы, которые не сбалансированы. Для гармонических искажений выбираются длина, скорость и точки опоры. Якорь может быть спроектирован с рядом основных компонентов , а именно сердечником, обмоткой, валом и коммутатором.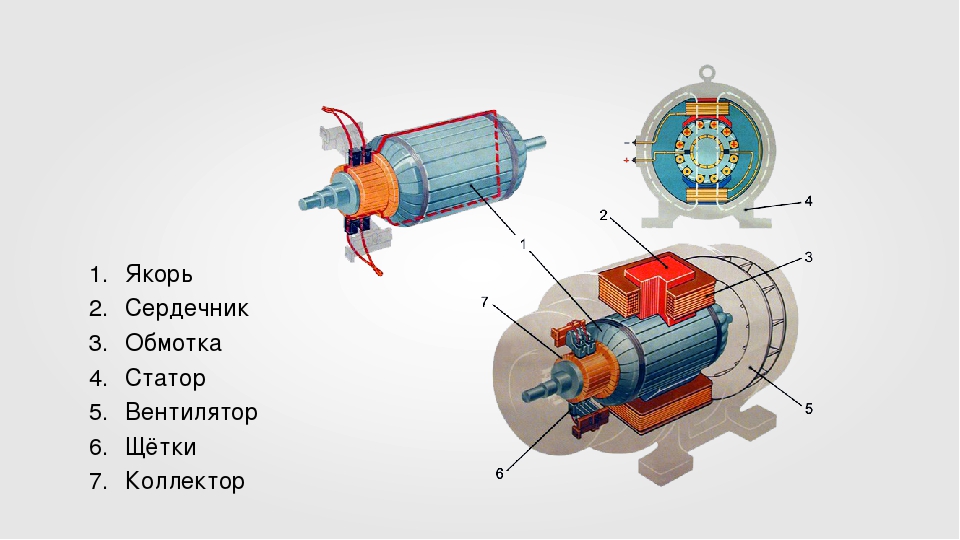
Функция якоря или работа якоря
Вращение якоря может быть вызвано взаимодействием двух магнитных полей . Одно магнитное поле может быть создано обмоткой возбуждения, а второе может быть создано с помощью якоря, в то время как напряжение прикладывается к щеткам, чтобы войти в контакт с коммутатором. Когда ток проходит через обмотку якоря, он создает магнитное поле. Это не соответствует полю, создаваемому катушкой возбуждения.
Это вызовет силу притяжения к одному полюсу, а также отвращение к другому. Когда коммутатор подключен к валу, он также будет перемещаться с такой же степенью, а также активирует полюс. Якорь будет продолжать преследовать полюс, чтобы вращаться.
Если на щетки не подается напряжение, то поле будет возбуждено, а якорь будет приводиться в движение механически. Приложенное напряжение переменное, поскольку оно приближается и течет от полюса.Однако коммутатор связан с валом и часто активирует полярность, потому что он вращается, подобно тому, как реальный выходной сигнал может наблюдаться через щетки в постоянном токе.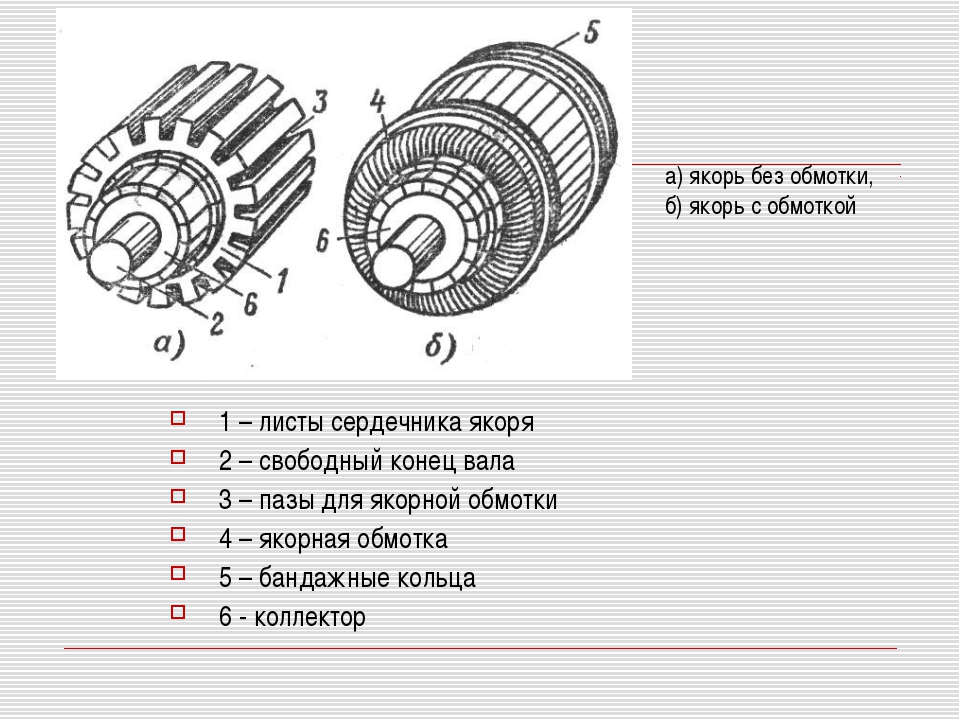
Обмотка якоря и реакция якоря
Обмотка якоря — это обмотка, в которой может индуцироваться напряжение. Точно так же обмотка возбуждения — это обмотка, в которой основной поток поля может генерироваться всякий раз, когда через обмотку протекает ток. Обмотка якоря имеет некоторые из основных терминов, а именно виток, катушку и обмотку.
Реакция якоря является результатом потока якоря поверх основного потока поля. Обычно двигатель постоянного тока включает в себя две обмотки, такие как обмотка якоря, а также обмотка возбуждения. Всякий раз, когда мы стимулируем обмотку возбуждения, она генерирует поток, который соединяется через якорь, и это вызывает ЭДС и, следовательно, ток в якоре.
Области применения арматуры
Области применения арматуры включают следующее.
- Якорь используется в электрической машине для выработки энергии.
- Якорь можно использовать как ротор, иначе статор.
- Используется для контроля тока в двигателях постоянного тока.

Таким образом, это все о обзоре якоря , который включает в себя то, что такое якорь, компоненты, работа и приложения. Наконец, исходя из приведенной выше информации, мы можем сделать вывод, что якорь является важным компонентом, используемым в электрической машине для выработки энергии. Он может быть как на вращающейся части, так и на неподвижной части машины.Вот вам вопрос, как работает арматура ?
Что такое арматура? (В электродвигателе и генераторе) | Electrical4U
Что такое якорь?
Якорь определяется как компонент электрической машины (т. Е. Двигателя или генератора), который проводит переменный ток (AC). Якорь проводит переменный ток даже в машинах с постоянным током через коммутатор (который периодически меняет направление тока) или за счет электронной коммутации (например, в бесщеточном двигателе постоянного тока).
Якорь обеспечивает корпус и поддержку обмотки якоря. В электрических машинах магнитное поле создается постоянным магнитом или электромагнитом.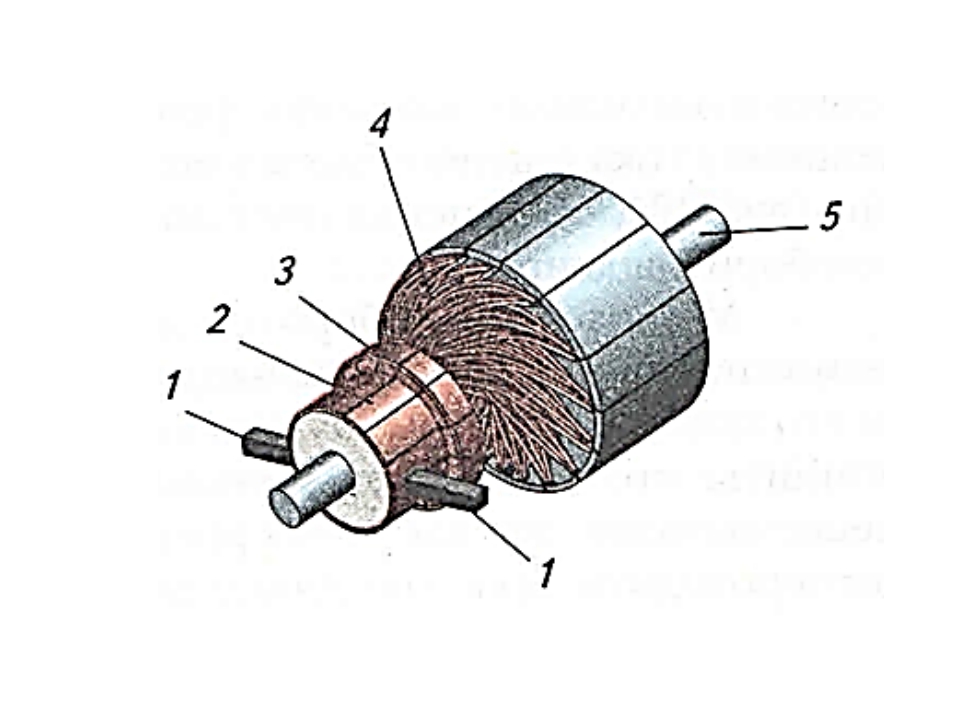 Обмотка якоря взаимодействует с магнитным полем, создаваемым в воздушном зазоре. Статор может быть вращающейся частью (ротор) или неподвижной частью (статор).
Обмотка якоря взаимодействует с магнитным полем, создаваемым в воздушном зазоре. Статор может быть вращающейся частью (ротор) или неподвижной частью (статор).
В 19, -м, веке слово «арматура» было введено как технический аспект и означало « хранитель магнита ».
Как работает арматура?
Якорь используется как электродвигатель или генератор. Якорь используется для связи между двумя магнитными потоками.
Когда якорь используется в качестве электродвигателя, из-за относительного движения между потоком, создаваемым обмоткой возбуждения, и потоком, создаваемым обмоткой якоря, индуцируется ЭДС.
Эта ЭДС противодействует току якоря и крутящему моменту, создаваемому в роторе. Таким образом, электрическая энергия преобразуется в механическую.Крутящий момент, возникающий в роторе, передается для вращения других устройств через вал.
Когда якорь используется как электрогенератор, в большинстве случаев якорь используется как ротор. А якорь приводился в движение механически с помощью дизельного двигателя или тягача.
А якорь приводился в движение механически с помощью дизельного двигателя или тягача.
Обмотка возбуждения возбуждается для создания магнитного поля. ЭДС якоря управляет током якоря и, следовательно, механическая мощность вала преобразуется в электрическую.
Детали и схема якоря
Якорь состоит из сердечника, обмотки, коллектора и вала.Схема якоря представлена ниже.
Схема, иллюстрирующая части якоря.Части якоря подробно обсуждаются ниже.
Сердечник якоря
Сердечник якоря состоит из ламинированных тонких металлических пластин, а не из цельной детали. Толщина пластин зависит от частоты питания. Его толщина составляет примерно 0,5 мм. Для сердечника якоря используется многослойная кремнистая сталь, чтобы уменьшить вихревые токи и гистерезисные потери.
Сердечник якоря обычно имеет полую цилиндрическую форму.А вал помещен внутрь сердечника якоря.
Ядро состоит из количества слотов. Обмотка якоря размещается в пазах на внешней поверхности сердечника якоря. Прорези в сердечнике якоря наклонены под некоторым углом, чтобы избежать магнитного запирания и обеспечить плавное вращение.
Прорези в сердечнике якоря наклонены под некоторым углом, чтобы избежать магнитного запирания и обеспечить плавное вращение.
Обмотка якоря
Обмотка якоря вставляется в пазы сердечника якоря. Обмотка якоря изолирована, чтобы избежать прямого контакта катушки с сердечником.Как правило, обмотка состоит из меди. Но в некоторых случаях он сделан из алюминия, чтобы снизить стоимость машины. По конструкции обмотки якоря она может быть намотанной внахлест или волной.
В схеме намотки внахлест количество путей тока равно количеству полюсов и щеток. В этом типе обмотки конечный конец одной катушки подключается к сегменту коммутатора, а начальный конец следующей катушки подключается к тому же полюсу и сегменту коммутатора.
В схеме волновой обмотки количество путей тока всего два. В этом типе обмотки оба конца каждой катушки подключены к сегменту коммутатора с расстоянием между полюсами. Это обеспечивает последовательное соединение катушек и добавление напряжений в обмотке между щетками.
Чтобы узнать больше об этих схемах обмотки якоря, узнайте больше о шаге полюсов и размахе катушки.
Вал
Вал машины используется для передачи механической энергии.Это жесткий стержень, установленный между двумя подшипниками. Длина, скорость и точки опоры решены для минимизации гармонических искажений. Толщина вала выбрана достаточной для передачи крутящего момента, необходимого машине. и он должен быть достаточно жестким, чтобы контролировать любые дисбалансные силы.
Коммутатор
Коммутатор состоит из медных шин, каждая из которых отделена друг от друга с помощью изоляционных материалов, таких как слюда или пластик.
Он прижимается к валу, и провода от каждой катушки выходят из пазов и подключаются к стержням коммутатора.Когда коммутатор прижимается к валу, он должен быть точно совмещен с пазом.
Якорь должен быть размещен с точным угловым смещением от стержня коллектора для эффективной работы магнитной цепи.
Что заставляет якорь электродвигателя вращаться?
Электродвигатели используются для преобразования электрической энергии в механическую. Обычно якорь — это вращающаяся часть машины.
Обычно якорь — это вращающаяся часть машины.
Проводник с током испытывает силу, когда он помещен в магнитное поле, а направление силы задается правилом левой руки Флеминга.
Когда питание подается на статор, в двигателе индуцируется вращающееся магнитное поле. Это вращающееся магнитное поле оказывает давление на якорь (ротор), и якорь вращается. Иногда это называют реакцией якоря синхронного двигателя.
Как проверить якорь?
Если якорь поврежден, двигатель не запустится. Итак, нам нужно протестировать арматуру. Для проверки якоря снимите его с двигателя.
Тест якоря 1
Сначала проверим обмотку якоря.С помощью этого теста мы можем определить, разомкнута ли обмотка якоря или короткозамкнута.
В этом тесте мы измерим сопротивление двух стержней коммутатора каждой катушки под углом 180 ° друг к другу с помощью омметра. Показания омметра зависят от размера двигателя. Но в этом состоянии нас не интересуют точные показания.
После проверки одного показания поверните якорь и проверьте сопротивление между каждой парой стержней на коммутаторе.
Если показания одинаковы для всех пар, обмотка якоря в порядке.А если показание падает до нуля, обмотка якоря закорочена. Точно так же, если показание увеличивается в сторону бесконечности, обмотка якоря разорвана или разомкнута.
Тест арматуры 2
Нам нужно найти; какая обмотка повреждена. Итак, для этого нам нужно измерить сопротивление каждого бара. Как и в тесте-1, если показания одинаковые для всех стержней, обмотка в порядке. А если вы обнаружите резкое изменение сопротивления, обмотка будет повреждена.
Тест якоря 3
В этом тесте мы измеряем сопротивление каждого стержня коммутатора с блоком якоря. В этом испытании штанги коммутатора не должны иметь электрического соединения с блоком якоря.
Основы электродвигателя постоянного тока | EC&M
Двигатель первого типа до сих пор широко используется
В конце 1800-х годов несколько изобретателей построили первые работающие двигатели, в которых использовалась мощность постоянного тока (DC).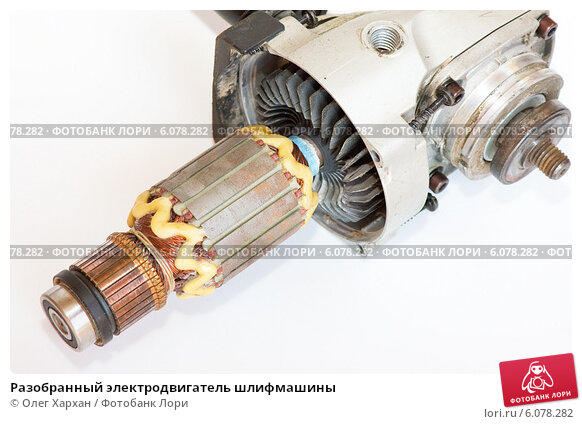 После изобретения асинхронного двигателя машины переменного тока в большинстве случаев заменили машины постоянного тока.Однако двигатели постоянного тока все еще находят множество применений.
После изобретения асинхронного двигателя машины переменного тока в большинстве случаев заменили машины постоянного тока.Однако двигатели постоянного тока все еще находят множество применений.
Принцип работы двигателя постоянного тока. Двигатели постоянного тока состоят из обмоток на роторе (якорь) и неподвижных обмоток (полюсов возбуждения). Во всех двигателях постоянного тока, за исключением двигателей с постоянными магнитами, ток должен подводиться к обмоткам якоря, пропуская ток через угольные щетки, которые скользят по медным поверхностям, называемым коммутатором, который установлен на роторе. Шины коммутатора припаяны к катушкам якоря. Комбинация щетка / коммутатор образует ползунковый переключатель, который активирует определенные части якоря в зависимости от положения ротора.Этот процесс создает северный и южный магнитные полюса на роторе, которые притягиваются или отталкиваются северным и южным полюсами статора, которые формируются путем пропускания постоянного тока через обмотки возбуждения. Именно это магнитное притяжение и отталкивание заставляет ротор вращаться.
Преимущества.
Самым большим преимуществом двигателей постоянного тока может быть регулирование скорости. Поскольку скорость прямо пропорциональна напряжению якоря и обратно пропорциональна магнитному потоку, создаваемому полюсами, регулировка напряжения якоря и / или тока возбуждения изменит скорость ротора.Сегодня преобразователи частоты могут обеспечить точное управление скоростью для двигателей переменного тока, но они делают это за счет качества электроэнергии, поскольку твердотельные переключающие устройства в приводах генерируют богатый спектр гармоник. Двигатель постоянного тока не оказывает отрицательного воздействия на качество электроэнергии.
Недостатки.
Электропитание, начальная стоимость и требования к техническому обслуживанию — это все минусы двигателей постоянного тока.
Выпрямители должны быть предусмотрены для любых двигателей постоянного тока, питаемых от сети.
Это также может вызвать проблемы с качеством электроэнергии.Конструкция двигателя постоянного тока значительно сложнее и дороже, чем двигатель переменного тока, в первую очередь из-за коммутатора, щеток и обмоток якоря. Асинхронный двигатель не требует переключателя или щеток, и в большинстве случаев вместо настоящих обмоток используются литые стержни ротора с короткозамкнутым ротором — два огромных упрощения.
Техническое обслуживание узла щетка / коммутатор требует значительных усилий по сравнению с конструкциями асинхронных двигателей.
 Это также может вызвать проблемы с качеством электроэнергии.
Это также может вызвать проблемы с качеством электроэнергии.Несмотря на недостатки, двигатели постоянного тока находят широкое применение, особенно в нишевых приложениях, таких как автомобили и небольшая бытовая техника.
Двигатели с постоянными магнитами.
Здесь на роторе вместо обмоток якоря установлены постоянные магниты. Поскольку магнитное поле, создаваемое на роторе, имеет ограниченную силу и не поддается контролю, двигатели с постоянными магнитами обычно имеют небольшие размеры и вырабатывают небольшую мощность.
Моторы серии .
Двигатели сериисоединяют обмотки возбуждения последовательно с якорем. У серийных двигателей отсутствует хорошее регулирование скорости, но они хорошо подходят для нагрузок с высоким крутящим моментом, таких как электроинструменты и автомобильные стартеры, из-за их высокого крутящего момента и компактных размеров.
Двигатели параллельные.
В параллельных двигателяхиспользуются обмотки возбуждения с высоким сопротивлением, включенные параллельно якорю. Изменение сопротивления поля изменяет скорость двигателя. Шунтирующие двигатели подвержены реакции якоря, искажению и ослаблению магнитного потока, создаваемого полюсами, что приводит к проблемам коммутации, о чем свидетельствует искрение на щетках.Установка дополнительных полюсов, называемых межполюсниками, на статоре между основными полюсами, соединенными последовательно с якорем, снижает реакцию якоря.
Составные двигатели.
Здесь объединены концепция серии и конструкции шунта. На рисунке выше показан один из способов подключения составного двигателя с промежуточными полюсами. Синие линии обозначают поле шунта, красные линии обозначают последовательное поле, а зеленые линии показывают межполюсные обмотки, включенные последовательно с якорем.
На рисунке выше показан один из способов подключения составного двигателя с промежуточными полюсами. Синие линии обозначают поле шунта, красные линии обозначают последовательное поле, а зеленые линии показывают межполюсные обмотки, включенные последовательно с якорем.
Спустя более века двигатели постоянного тока все еще широко используются, и благодаря нишевым приложениям, которые не показывают никаких признаков исчезновения, они будут существовать в течение многих лет.
Электродвигатель — Двигатель постоянного тока — Якорь, ток, полюс и полюса
Работа двигателя постоянного тока зависит от работы полюсов статора с частью ротора или якоря. Статор содержит четное число полюсов с переменной магнитной полярностью, каждый полюс состоит из электромагнита, образованного из обмотки полюса, намотанной на сердечник полюса.Когда через обмотку протекает постоянный ток, создается магнитное поле. Арматура Поперечное сечение простого электродвигателя постоянного тока. В его центре находится ротор, катушка, намотанная на железный якорь, который вращается внутри полюсов магнита, которые можно увидеть на внутренней стороне корпуса. Фотография Брюса Айверсона. Библиотека научных фотографий, Коллекция Национального общества Одубона / Photo Researchers, Inc. Воспроизведено с разрешения. также содержит обмотку, в которой ток течет в указанном направлении.Этот ток якоря взаимодействует с магнитным полем в соответствии с законом Ампера, создавая крутящий момент, который поворачивает якорь.
В его центре находится ротор, катушка, намотанная на железный якорь, который вращается внутри полюсов магнита, которые можно увидеть на внутренней стороне корпуса. Фотография Брюса Айверсона. Библиотека научных фотографий, Коллекция Национального общества Одубона / Photo Researchers, Inc. Воспроизведено с разрешения. также содержит обмотку, в которой ток течет в указанном направлении.Этот ток якоря взаимодействует с магнитным полем в соответствии с законом Ампера, создавая крутящий момент, который поворачивает якорь.
Если бы обмотки якоря вращались вокруг следующего полюса противоположной полярности, крутящий момент действовал бы в противоположном направлении, останавливая якорь. Чтобы предотвратить это, ротор содержит коммутатор, который изменяет направление тока якоря для каждого полюсного наконечника, мимо которого вращается якорь, таким образом гарантируя, что все обмотки, проходящие, например, через полюс северной полярности, будут иметь ток, текущий в в том же направлении, в то время как обмотки, проходящие через южные полюса, будут иметь противоположный ток, чтобы создать крутящий момент в том же направлении, что и крутящий момент, создаваемый северными полюсами. Коммутатор обычно состоит из разъемного контактного кольца, по которому движутся щетки, пропускающие постоянный ток.
Коммутатор обычно состоит из разъемного контактного кольца, по которому движутся щетки, пропускающие постоянный ток.
Вращение на обмоток якоря через поле статора создает напряжение на якоре, известное как противо-ЭДС (электродвижущая сила , ), поскольку оно противодействует приложенному напряжению: это следствие закона Фарадея. Величина противо-ЭДС зависит от напряженности магнитного поля и скорости вращения якоря.При первоначальном включении двигателя постоянного тока нет противодействия ЭДС, и якорь начинает вращаться. Счетчик ЭДС увеличивается с вращением. Действующее напряжение на обмотках якоря — это приложенное напряжение за вычетом противо-ЭДС.
Все о шунтовых двигателях постоянного тока
Электродвигатели принесли нам почти все современные удобства, позволив нам преобразовывать электрическую энергию в физическое движение. Эти машины помогли нам создать такие чудеса, как автомобили, компьютеры, кондиционеры и многие другие, и все это благодаря разнообразию электродвигателей, доступных в промышленности. Электродвигатель постоянного тока — электродвигатель, который использует источник постоянного тока, такой как аккумулятор, — является одной из наших старейших, но наиболее широко используемых разработок, и в этой статье мы рассмотрим один конкретный двигатель постоянного тока, шунтирующий двигатель постоянного тока. На первый взгляд может быть сложно увидеть уникальные свойства этого двигателя, но эта статья призвана помочь выделить эти различия и показать, почему инженеры могут предпочесть эту конструкцию другим моделям. Мы надеемся, что эта статья, исследуя настройку, работу и технические характеристики параллельных двигателей постоянного тока, поможет разработчикам сделать более осознанный выбор при реализации правильной машины для своего приложения.
Электродвигатель постоянного тока — электродвигатель, который использует источник постоянного тока, такой как аккумулятор, — является одной из наших старейших, но наиболее широко используемых разработок, и в этой статье мы рассмотрим один конкретный двигатель постоянного тока, шунтирующий двигатель постоянного тока. На первый взгляд может быть сложно увидеть уникальные свойства этого двигателя, но эта статья призвана помочь выделить эти различия и показать, почему инженеры могут предпочесть эту конструкцию другим моделям. Мы надеемся, что эта статья, исследуя настройку, работу и технические характеристики параллельных двигателей постоянного тока, поможет разработчикам сделать более осознанный выбор при реализации правильной машины для своего приложения.
Что такое щеточный двигатель постоянного тока и как они работают?
Шунтирующий двигатель постоянного тока — это просто особый тип щеточного двигателя постоянного тока, поэтому сначала будет полезно объяснить основные принципы, общие для всех этих конструкций (аналогичное объяснение можно найти в нашей статье о двигателях постоянного тока с последовательной обмоткой).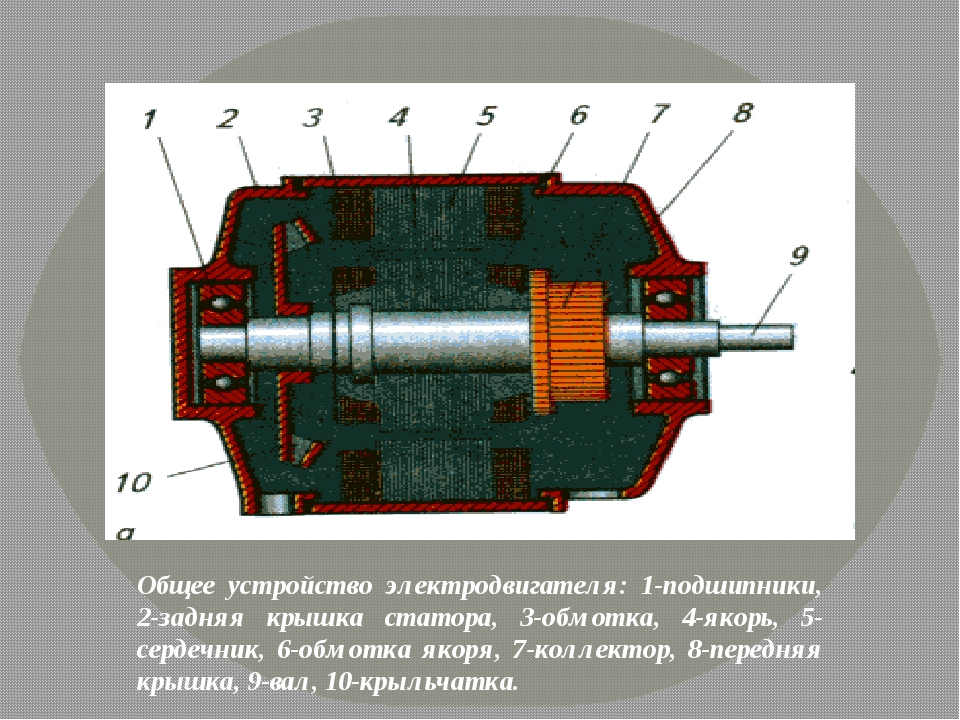 Рисунок 1 дает упрощенное представление о том, как работают двигатели постоянного тока, и показан ниже:
Рисунок 1 дает упрощенное представление о том, как работают двигатели постоянного тока, и показан ниже:
Рисунок 1: Упрощенная принципиальная схема для двигателей постоянного тока. Обратите внимание, что поле статора не входит в схему, так как его размещение зависит от того, как работает двигатель постоянного тока.
Все двигатели постоянного тока состоят из двух основных частей: статора — внешнего корпуса, содержащего поле статора — и ротора — вращающегося компонента, подключенного к источнику постоянного тока. Поле статора может быть создано либо из реальных постоянных магнитов, либо из обмотки провода (или «обмотки возбуждения», показанной на рисунке 1), которые создают постоянное магнитное поле через роторный узел. Ротор состоит из якоря, обмоток якоря, выходного вала, коммутаторов и щеток. Обмотка якоря представляет собой катушку с проволокой, которая проходит через якорь или через пластинки металла, которые направляют обмотки якоря вокруг выходного вала.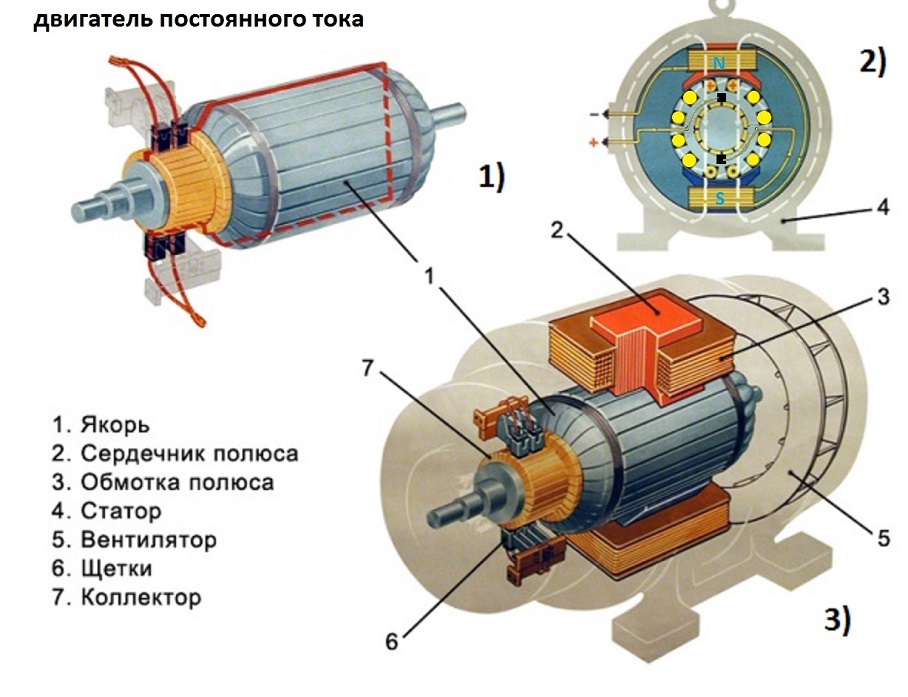 Эти обмотки якоря оканчиваются кольцами коммутатора, которые механически отделены от источника постоянного тока (другими словами, они «парят» над выходным валом, ожидая, когда их толкнут щетки). Когда оператор запускает двигатель, щетки сцепляются с кольцами коммутатора и замыкают цепь, показанную на Рисунке 1, заставляя ток течь через щетки, кольца коммутатора и обмотки якоря. Когда это происходит, в якоре создается электромагнитное поле, которое противодействует постоянному полю статора.Поскольку ротор может свободно вращаться, взаимодействие между этими двумя полями вызывает вращение выходного вала и, в конечном итоге, полезную скорость / крутящий момент.
Эти обмотки якоря оканчиваются кольцами коммутатора, которые механически отделены от источника постоянного тока (другими словами, они «парят» над выходным валом, ожидая, когда их толкнут щетки). Когда оператор запускает двигатель, щетки сцепляются с кольцами коммутатора и замыкают цепь, показанную на Рисунке 1, заставляя ток течь через щетки, кольца коммутатора и обмотки якоря. Когда это происходит, в якоре создается электромагнитное поле, которое противодействует постоянному полю статора.Поскольку ротор может свободно вращаться, взаимодействие между этими двумя полями вызывает вращение выходного вала и, в конечном итоге, полезную скорость / крутящий момент.
Что такое параллельные двигатели постоянного тока и как они работают?
Теперь, когда мы продемонстрировали общие принципы для всех двигателей постоянного тока, давайте взглянем на конкретную конструкцию шунтирующего двигателя постоянного тока, показанную ниже на рисунке 2:
Рис.
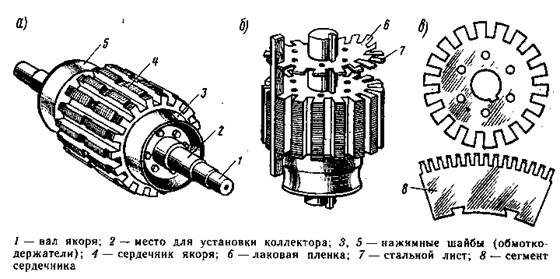 2: Принципиальная схема параллельных двигателей постоянного тока. Обратите внимание, как обмотка возбуждения подключена параллельно ротору — это определяющая особенность шунтирующих двигателей постоянного тока.
2: Принципиальная схема параллельных двигателей постоянного тока. Обратите внимание, как обмотка возбуждения подключена параллельно ротору — это определяющая особенность шунтирующих двигателей постоянного тока.Обмотка возбуждения, которая создает постоянное магнитное поле в статоре, подключается параллельно или шунтируется с обмотками якоря в шунтирующих двигателях постоянного тока. Таким образом, для питания якоря и обмоток возбуждения используется один и тот же источник питания, а общий ток разделяется на два «параллельных» пути.
Обмотка возбуждения в шунтирующих двигателях постоянного тока состоит из множества обмоток из тонкой проволоки для увеличения напряженности магнитного поля и ограничения тока через катушку. Таким образом, ток через катушку возбуждения уменьшается и, таким образом, увеличивается в якоре (помните, что ток распределяется при параллельном подключении).Больший ток в якоре вызывает явление, известное как обратная ЭДС — электродвижущая сила, создаваемая магнитным полем якоря, вращающимся через поле статора, — а обратная ЭДС служит для уменьшения тока через обмотку якоря.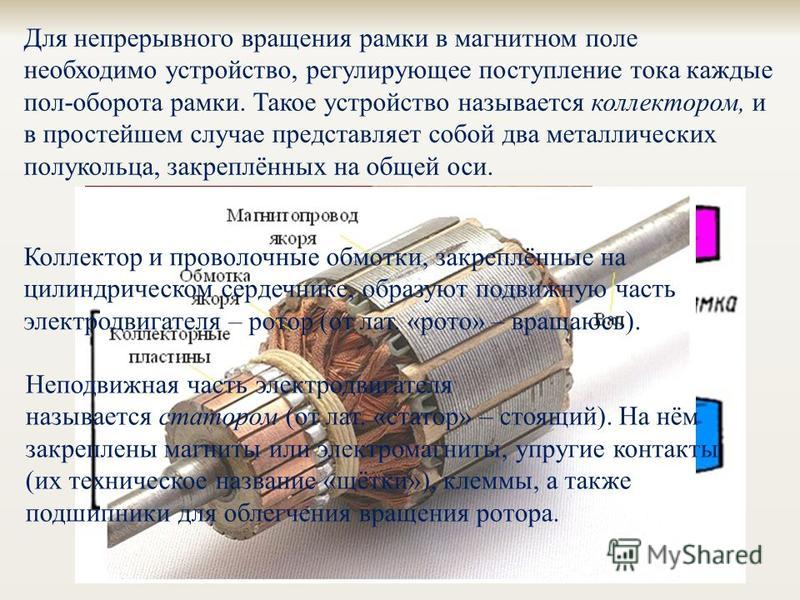
По мере увеличения скорости двигателя эта обратная ЭДС увеличивается (так как она пропорциональна скорости) и аналогичным образом уменьшается, если вращение якоря замедляется из-за увеличения нагрузки на вал. Это дает шунтирующим двигателям постоянного тока уникальную способность саморегулировать свою скорость, особенно когда на вал передается большая нагрузка, и поэтому они в просторечии известны как двигатели с постоянной скоростью.Таким образом, параллельные двигатели имеют низкий пусковой момент, но постоянную скорость; это противоположно последовательным двигателям постоянного тока, у которых их пусковой момент высок, но практически отсутствует регулирование скорости (для получения дополнительной информации ознакомьтесь с нашей статьей, посвященной двигателям постоянного тока с последовательной обмоткой). Они также обратимы, просто изменяя полярность катушки якоря или катушки возбуждения.
Характеристики параллельного двигателя постоянного тока
Полезно знать, на какие значения следует обращать внимание при выборе шунтирующего двигателя постоянного тока. В этой статье будут кратко рассмотрены некоторые общие спецификации, на которые следует обратить внимание, но знайте, что в большинстве спецификаций содержится гораздо больше информации, чем здесь.
В этой статье будут кратко рассмотрены некоторые общие спецификации, на которые следует обратить внимание, но знайте, что в большинстве спецификаций содержится гораздо больше информации, чем здесь.
Напряжение якоря / возбуждения
Из-за того, что якорь и обмотки возбуждения соединены параллельно, на каждый компонент подается два отдельных напряжения (но не на всю схему; помните, что они используют один и тот же источник питания). В результате в большинстве спецификаций указаны два номинальных напряжения для шунтирующего двигателя постоянного тока, по одному для каждой катушки, часто с диапазонами.Например, шунтирующий двигатель может иметь напряжение возбуждения 220 В при максимальном напряжении до 500 В и напряжение якоря 440 В при максимальном напряжении до 600 В. Обратите внимание, что эти значения зависят от размера корпуса и конструкции двигателя. Также обратите внимание, что двигатель постоянного тока никогда не следует использовать с источником питания, напряжение которого меньше его номинального, так как это снижает производительность и может перегреться.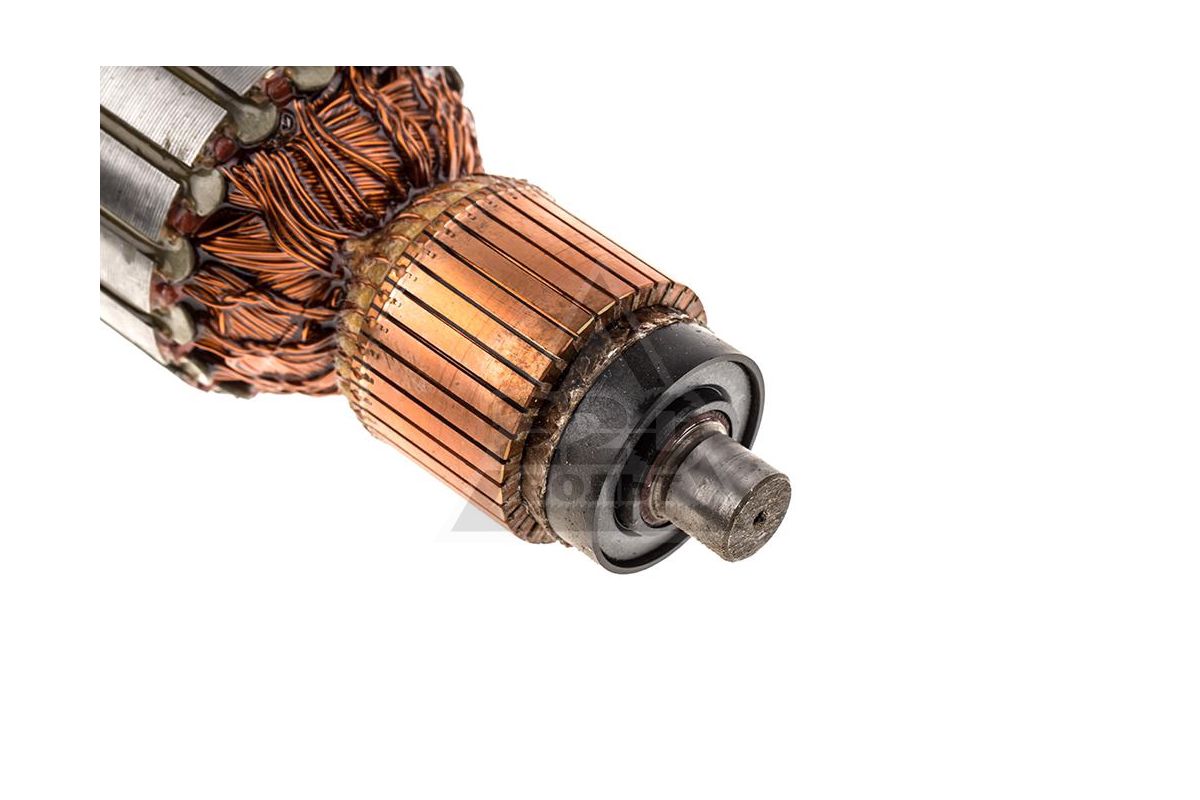
Мощность и базовая скорость
Поскольку эти двигатели считаются с постоянной скоростью, в спецификации обычно указывается базовая скорость и соответствующая мощность (в л.с. или кВт).Эти значения показывают, что двигатель может двигаться и с какой скоростью он может его перемещать, хотя параллельные двигатели постоянного тока могут регулировать свою скорость даже при изменяющейся нагрузке (в пределах безопасных допусков).
Размер рамы / размеры
NEMA устанавливает стандартные размеры рамы, чтобы покупатель мог легко заменять моторы между продавцами, но обычно размеры мотора всегда указываются, если он не стандартизирован. Размер корпуса даст разработчику представление о том, как двигатель впишется в любое конкретное приложение, и даст приблизительное представление о том, насколько мощным будет двигатель (хотя размер может вводить в заблуждение для электродвигателей, поэтому будьте осторожны).
Срок службы кисти
Поскольку шунтирующий двигатель постоянного тока использует щетки для подключения источника питания к вращающемуся якорю, они, естественно, со временем ухудшатся. Большинство двигателей постоянного тока имеют срок службы щеток (в часах), поэтому операторы могут записывать, как долго щетки использовались и когда их заменять. Очень важно поддерживать эти двигатели, заменяя при необходимости щетки, иначе они могут выйти из строя или выйти из строя.
Большинство двигателей постоянного тока имеют срок службы щеток (в часах), поэтому операторы могут записывать, как долго щетки использовались и когда их заменять. Очень важно поддерживать эти двигатели, заменяя при необходимости щетки, иначе они могут выйти из строя или выйти из строя.
Заявки и критерии выбора
В отличие от серийных двигателей постоянного тока, параллельные двигатели постоянного тока превосходны в приложениях с постоянной скоростью благодаря конструкции с обратной связью.Они могут поддерживать точные обороты и крутящий момент даже при различных условиях нагрузки, что делает их полезными для деревообрабатывающего оборудования, шлифовальных машин или любого другого вращающегося электроинструмента, где пользователь будет давить против вращения. Обратите внимание, что эти двигатели имеют низкий пусковой крутящий момент, поэтому эти двигатели не могут быть подключены к большой нагрузке при запуске и должны подождать до использования на номинальной скорости.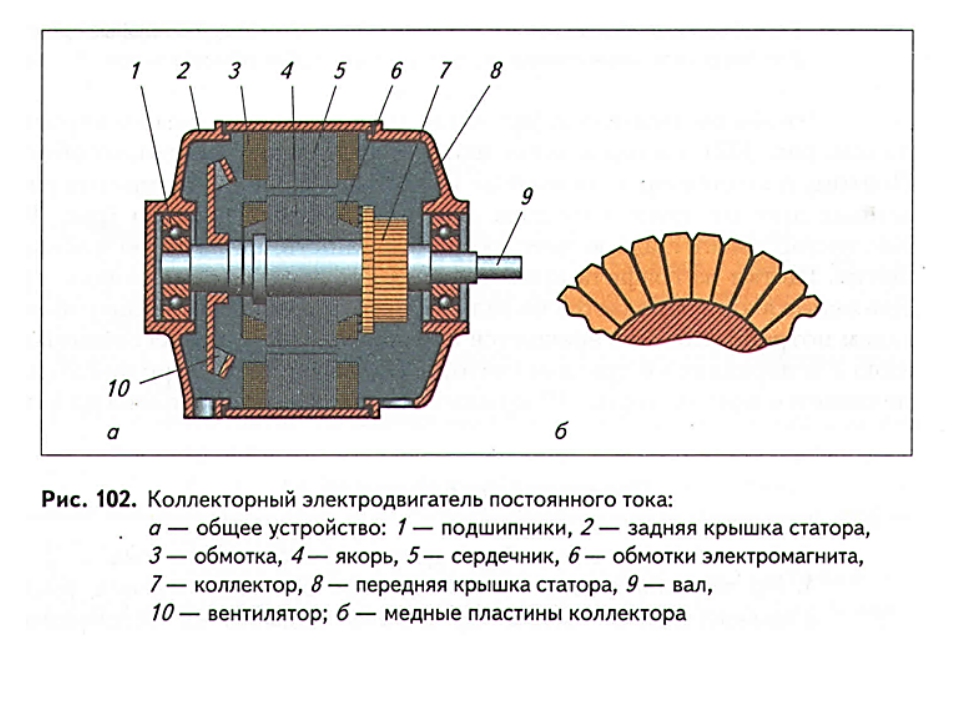 Они также немного падают в скорости при большой нагрузке, поскольку ни один электродвигатель не работает в идеальных условиях, и все испытывают потери.
Они также немного падают в скорости при большой нагрузке, поскольку ни один электродвигатель не работает в идеальных условиях, и все испытывают потери.
Эти двигатели очень просты в установке, с возможностью работы с регуляторами скорости.Чаще всего они используются в вышеупомянутых электроинструментах, а также в дворниках, автомобильных окнах, компьютерных вентиляторах и т. Д. Хотя изначально шунтирующие двигатели постоянного тока не такие мощные, как их собратья с последовательной обмоткой, они не дают сбоев при выдаче механической выходной мощности, обеспечивая пользователям постоянство исходной выходной мощности.
Сводка
В этой статье представлено понимание того, что такое шунтирующие двигатели постоянного тока и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- http://www.ece.uah.edu/courses/material/EE410-Wms2/Electric%20motors.pdf
- http://www2.mae.ufl.edu/designlab/Class%20Projects/Background%20Information/Electric%20DC%20motors.htm
Прочие изделия для двигателей
Больше от Machinery, Tools & Supplies
Общие принципы работы (двигатели и приводы)
Основные компоненты В любом двигателе постоянного тока есть две основные цепи: якорь (устройство, которое вращается, иногда называемое ротором) и поле (неподвижная часть, иногда называемая статором).Два компонента магнитно взаимодействуют друг с другом, вызывая вращение якоря. Мы более подробно рассмотрим каждую из частей и то, как они взаимодействуют.
На рис. 3-1 показан очень упрощенный вид основных частей двигателя постоянного тока.
Как видно на рисунке 3-1, якорь и поле представляют собой две отдельные цепи и физически расположены рядом друг с другом, чтобы способствовать магнитному взаимодействию.
Рисунок 3-1. Основные части двигателя постоянного тока
Якорь имеет составную часть, называемую коммутатором.Коммутатор действует как электрический выключатель, всегда меняя полярность магнитного потока, чтобы обеспечить «отталкивающую» силу. Якорь вращается в результате отталкивающего движения, создаваемого магнитным потоком якоря, в противоположность магнитному потоку, создаваемому обмоткой возбуждения.
Физическое подключение напряжения к якорю осуществляется с помощью устройства, называемого щетками. Щетки изготовлены из углеродного материала, который постоянно контактирует с пластинами коллектора якоря.Щетки обычно подпружинены, чтобы обеспечить постоянное давление щетки на пластины коллектора. На рис. 3-2 показано электрическое соединение якоря и обмотки возбуждения.
Рисунок 3-2. Якорь и полевые соединения
Как видно на Рисунке 3-2, выводы выведены от обмоток и обычно заканчиваются в распределительной коробке. IF указывает на соединение обмотки возбуждения, а IA указывает на соединение якоря.(Примечание: «I» обозначает ток, означающий «силу тока».)
IF указывает на соединение обмотки возбуждения, а IA указывает на соединение якоря.(Примечание: «I» обозначает ток, означающий «силу тока».)
Рисунок 3-3. Конструкция якоря
Устройство якоря будет выглядеть, как показано на Рисунке 3-3.
Обмотки вставлены в пазы якоря. Эти прорези образованы серией железных «пластин», соединенных эпоксидной смолой в длинный узкий блок. Эти прорези фактически наклонены, чтобы обеспечить плавное вращение на очень низких скоростях. (Магнитный поток имеет тенденцию «прыгать» от поля к полю.Когда это происходит, результатом является подергивание. Если обмотки расположены под углом, магнитное взаимодействие между якорем и обмоткой возбуждения ослабляется, и рывки значительно уменьшаются.)
Многие производители на самом деле имеют продольные отверстия вокруг внутреннего центра якоря. Это позволяет дополнительному охлаждающему воздуху проходить через якорь, уменьшая перегрев. Щетки контактируют с коммутатором, диаметр которого немного меньше по сравнению с основным корпусом устройства (правая часть фото).
Якорь имеет множество катушек (обмоток), обеспечивающих максимальный крутящий момент. Полярность катушек якоря должна быть изменена в точное время, чтобы гарантировать, что отталкивающее действие продолжается. Это действие называется коммутацией и происходит, когда правильно выровненные щетки контактируют с коммутатором.
Специальные обмотки, называемые коммутационными обмотками, устанавливаются между полюсами магнитного поля для выравнивания магнитного поля, протекающего через якорь. Если бы эти обмотки не были установлены, возникло бы искажение или изгиб магнитного потока, что привело бы к снижению крутящего момента двигателя.На рисунке 3-4 показано расположение коммутационных обмоток.
Рисунок 3-4. Коммутационные обмотки
По мере износа щеток от постоянного контакта с пластинами коммутатора возникает дуга. Образование дуги можно уменьшить, используя коммутационные обмотки, но некоторая дуга все же возникает. Чтобы уменьшить искрение, которое приводит к снижению производительности, требуется замена щеток. Замена является частью любой программы планового профилактического обслуживания (PM).
Замена является частью любой программы планового профилактического обслуживания (PM).
Блок обмотки возбуждения устроен почти так же, с металлическими пластинами, составляющими основную часть устройства.Обмотки вставляются вдоль обмоток. Пластины железа имеют тенденцию увеличивать силу магнитного потока. На Рис. 3-5 показана типовая конструкция обмотки возбуждения двигателя.
Есть дополнительные обмотки, которые устанавливаются на магнитные полюса обмоток возбуждения. Эти обмотки называются компенсационными обмотками и стремятся сглаживать поток поля через полюс. Без компенсационных обмоток левая сторона северного полюса стала бы насыщенной из-за дополнительных магнитных полей, создаваемых якорем.На Рисунке 3-6 показано расположение этих обмоток.
Здесь следует отметить, что существует другой тип двигателя постоянного тока, в котором вместо обмоток возбуждения используются постоянные магниты. Эти типы двигателей, обозначенные как двигатели постоянного тока с постоянным магнитом, не нуждаются в отдельном возбудителе или источнике питания для создания магнитного потока поля. Нужен только источник питания для якоря. Если имеется напряжение питания якоря, двигатель постоянного тока с постоянными магнитами имеет все необходимые магнитные элементы для вращения вала.
Нужен только источник питания для якоря. Если имеется напряжение питания якоря, двигатель постоянного тока с постоянными магнитами имеет все необходимые магнитные элементы для вращения вала.
На Рисунке 3-7 показано соотношение основных частей двигателя постоянного тока.Эти детали могут немного отличаться в зависимости от производителя, но все двигатели постоянного тока будут иметь эти компоненты.
Контроль скорости и крутящего момента
Скорость двигателя постоянного тока напрямую зависит от приложенного напряжения. Как указывалось ранее, двигателю постоянного тока требуются две отдельные цепи для создания крутящего момента двигателя.
Рисунок 3-5. Конструкция обмотки возбуждения двигателя
Рисунок 3-6. Компенсационные обмотки
Поле получает напряжение от отдельного источника питания, иногда называемого возбудителем поля. Этот возбудитель обеспечивает питание поля, которое, в свою очередь, генерирует ток и магнитный поток. В нормальном рабочем состоянии поле поддерживается на максимальном уровне, что позволяет обмотке возбуждения развивать максимальный ток и магнитный поток. Это состояние известно как опера-
Этот возбудитель обеспечивает питание поля, которое, в свою очередь, генерирует ток и магнитный поток. В нормальном рабочем состоянии поле поддерживается на максимальном уровне, что позволяет обмотке возбуждения развивать максимальный ток и магнитный поток. Это состояние известно как опера-
Рисунок 3-7. Основные узлы двигателя постоянного тока
т в ряду якоря. (Единственный способ контролировать скорость — это изменять напряжение якоря.)
Источник питания якоря подает напряжение на якорь через щетки и коммутатор.В основном, чем больше приложенное напряжение, тем выше скорость двигателя. Мы можем увидеть это соотношение в формуле ниже:
Как видно из формулы, если нагрузка на двигатель остается постоянной, ток якоря останется постоянным, как и сопротивление якоря. Кроме того, останется неизменной конструктивная константа двигателя и сила магнитного поля. Когда все эти компоненты остаются постоянными
, единственным определяющим фактором скорости является величина приложенного напряжения якоря.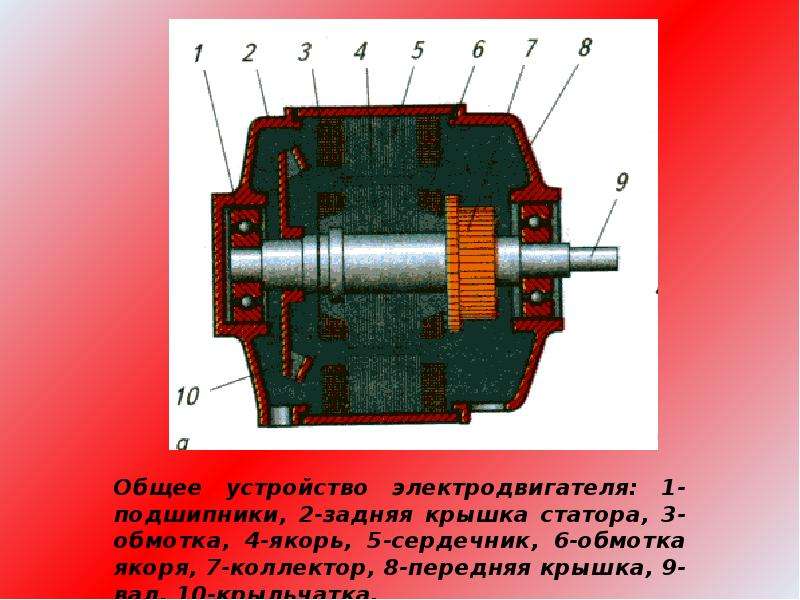
Вышеупомянутая формула будет работать для определения скорости, когда она равна или ниже базовой скорости двигателя. Формула также укажет скорость при работе со скоростью выше базовой. Можно работать в расширенном диапазоне скоростей, если производитель двигателя консультируется по поводу максимальной безопасной рабочей скорости.
Как показано в формуле, если напряжение якоря максимальное, а все другие компоненты остаются постоянными, скорость можно увеличить, уменьшив магнитный поток (Q). Однако необходимо отметить, что это нужно делать с осторожностью.
Пониженный поток поля является результатом снижения напряжения возбудителя поля. Если напряжение снижается почти до нуля, скорость якоря может увеличиться до точки саморазрушения двигателя. Эта операция, превышающая базовую скорость, по очевидным причинам известна как диапазон скорости ослабления поля. Возбудитель возбуждения будет иметь защитные приспособления для предотвращения чрезмерной скорости. Большинство систем приводов постоянного тока допускают диапазон ослабления поля не менее 1/3 нормального напряжения. Если напряжение падает ниже этого значения, запрограммированные цепи безопасности в приводе отключают питание якоря и переводят двигатель в безопасное состояние.
Если напряжение падает ниже этого значения, запрограммированные цепи безопасности в приводе отключают питание якоря и переводят двигатель в безопасное состояние.
Повышенная скорость стала возможной благодаря уменьшенному потоку поля при работе со скоростью выше базовой. По сути, меньше ЭДС доступно, чтобы действовать как сдерживающий магнитный поток. Крутящий момент двигателя также является функцией скорости.
Типичное номинальное напряжение якоря в США составляет 90, 180, 240 или 500 В постоянного тока. Типичное номинальное напряжение поля в США составляет 100, 200, 150 или 300 В постоянного тока. Как указывалось ранее, величина напряжения, приложенного к якорю, будет определять скорость выходного вала. Например, если к двигателю со скоростью 1750 об / мин с якорем 240 В постоянного тока приложено 120 В постоянного тока (1/2 напряжения), скорость вала будет примерно 875 об / мин (1/2 скорости).
При определенных условиях крутящий момент двигателя остается постоянным при работе со скоростью ниже базовой. Однако при работе в диапазоне ослабления поля крутящий момент падает обратно пропорционально 1 / скорость2. Величину крутящего момента двигателя также можно определить по формуле. В двигателе постоянного тока существует следующее соотношение, которое помогает определить имеющийся крутящий момент двигателя:
где:
T = крутящий момент, развиваемый двигателем K1 = расчетная постоянная двигателя
Как видно из формулы, если магнитный поток поля поддерживается постоянным , а также расчетная постоянная двигателя, то крутящий момент пропорционален току якоря.Чем большую нагрузку воспринимает двигатель, тем больше тока потребляет якорь.
Преимуществом двигателей постоянного тока является их способность обеспечивать полный крутящий момент при нулевой скорости. Это достигается двумя источниками питания, питающими их силовые структуры для подачи напряжения на якорь и поле. Когда на якорь падает дополнительная нагрузка, магнитный поток якоря прорезает поток поля.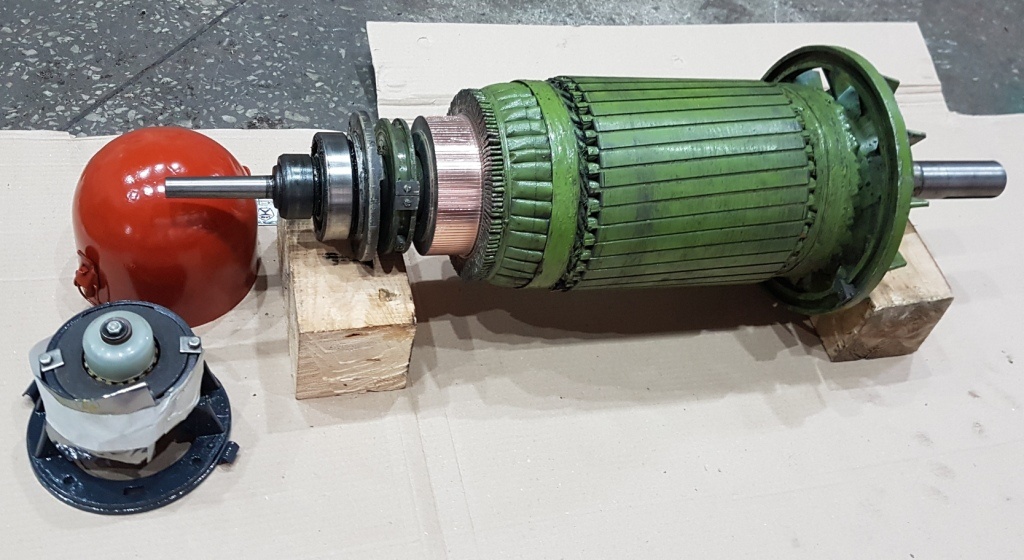 Как только это происходит, через якорь проходит больше тока, и силовая структура привода проводит необходимое количество тока для удовлетворения потребности.Это явление возникает, когда двигатель работает на любой скорости, включая нулевую.
Как только это происходит, через якорь проходит больше тока, и силовая структура привода проводит необходимое количество тока для удовлетворения потребности.Это явление возникает, когда двигатель работает на любой скорости, включая нулевую.
Существуют различные типы корпусов, связанных с двигателями постоянного тока. Ниже приведены наиболее распространенные конфигурации, встречающиеся в промышленности. Система охлаждения или вентиляции заложена в конструкции корпуса. В большинстве случаев, чтобы двигатель развивал полный крутящий момент при скорости менее 50%, требуется дополнительный вентилятор для охлаждения двигателя.
DPFG (полная защита от капель) Каплезащищенный корпус с полной защитой (DPFG) является самовентилируемым и не имеет внешних средств охлаждения.Во многих случаях эти типы двигателей могут быть модифицированы для приема дополнительного наружного воздуха. Большинство конструкций DPFG могут создавать 100% номинальный крутящий момент до 50% от базовой скорости.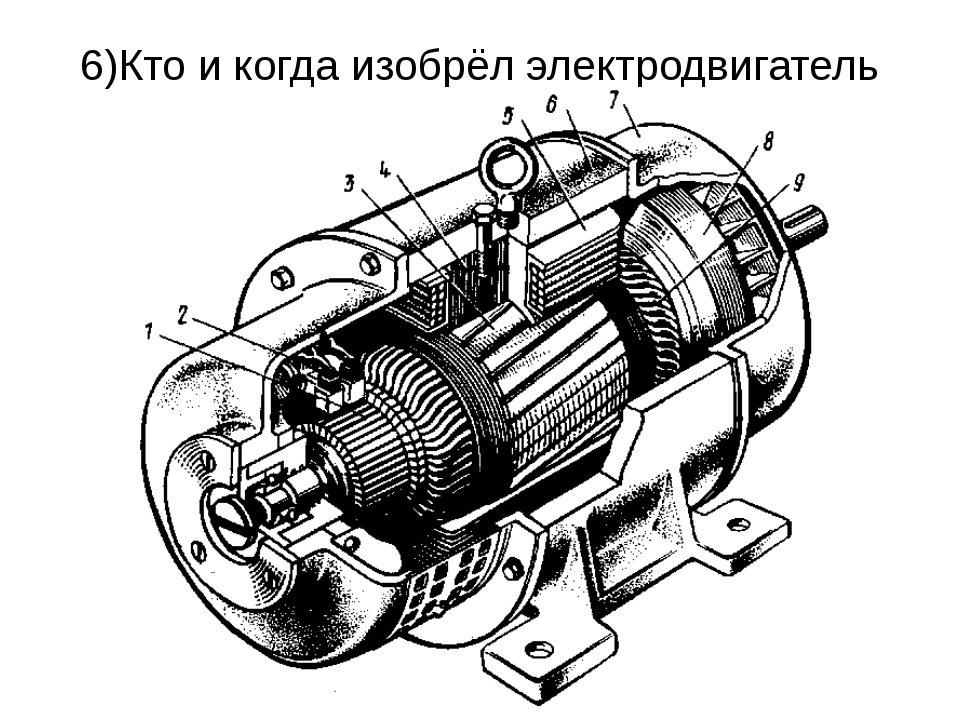 На Рисунке 3-8 показан двигатель DPFG.
На Рисунке 3-8 показан двигатель DPFG.
Рисунок 3-8. Двигатель DPFG
Кожух с каплезащищенной вентиляцией (DPBV) имеет встроенный вентилятор, который может включать или не включать фильтр. Воздуходувка обычно устанавливается на стороне коллектора для обеспечения постоянного потока охлаждающего воздуха.Двигатели с вентилятором
нередко обеспечивают 100% номинальный крутящий момент до 10 или 5% базовой скорости. На рисунке 3-9 показан двигатель DPBV.
Рисунок 3-9. Двигатель DPBV
Каплезащищенный корпус с отдельной вентиляцией (DPSV) использует воздуховод в объеме, необходимом для охлаждения двигателя. Этот тип двигателя способен передавать 100% крутящего момента при снижении до 10 или 5% базовой скорости. Во многих случаях этот тип подходит для использования в опасных или загрязненных средах. На рисунке 3-10 показан двигатель DPSV.
На рисунке 3-10 показан двигатель DPSV.
Рисунок 3-10. Двигатель ДПСВ
В полностью закрытом корпусе с раздельной вентиляцией (TESV) воздух поступает в двигатель и выходит из него в количестве кубических футов в минуту, необходимом для охлаждения. Этот тип двигателя способен передавать 100% крутящего момента при снижении до 10 или 5% базовой скорости. Во многих случаях этот тип подходит для использования в опасных или загрязненных средах.На рисунке 3-11 показан двигатель TESV.
Рисунок 3-11. Двигатель TESV (любезно предоставлен Emerson Motors Technologies ™)
Корпус полностью закрытого типа без вентиляции (TENV) не имеет внешнего охлаждения, но использует внутренний вентилятор для циркуляции воздуха внутри двигателя. Этот тип двигателя способен передавать 100% крутящего момента при снижении до 10 или 5% базовой скорости.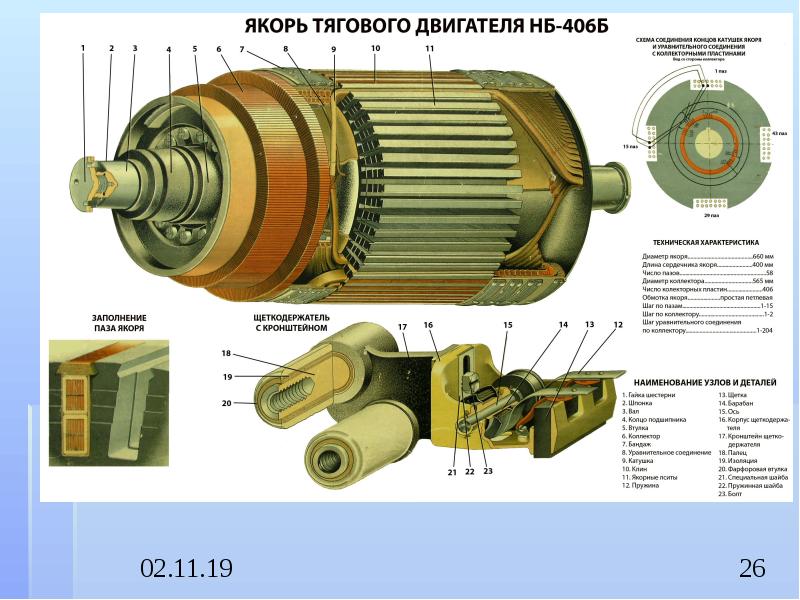 Из-за эффекта охлаждения эти типы кожухов не подходят для работы с большой мощностью.Для сравнения: открытый капельный двигатель мощностью 100 л.с. будет примерно таким же размером, как двигатель TENV мощностью 30 л.с. Рисунок 3-12 показывает двигатель TENV.
Из-за эффекта охлаждения эти типы кожухов не подходят для работы с большой мощностью.Для сравнения: открытый капельный двигатель мощностью 100 л.с. будет примерно таким же размером, как двигатель TENV мощностью 30 л.с. Рисунок 3-12 показывает двигатель TENV.
Рисунок 3-12. Двигатель ТЭНВ
Кожух полностью закрытого типа (TEAO) имеет вентилятор, установленный непосредственно на верхней части двигателя. Это обеспечивает постоянный поток воздуха над внешней поверхностью корпуса двигателя. Эффект внутреннего охлаждения отсутствует, только вокруг внешней части устройства.Двигатели этого типа способны передавать 100% крутящего момента примерно до 10% от базовой скорости. На рисунке 3-13 показан двигатель TEAO.
TEFC (полностью закрытое вентиляторное охлаждение) Корпус полностью закрытого типа с вентиляторным охлаждением (TEFC) имеет установленный снаружи вентилятор на торцевом валу коллектора. Воздушный поток является прямым результатом
Воздушный поток является прямым результатом
Рисунок 3-13. Мотор ТЭАО
скорость мотора. По этой причине этот тип корпуса не подходит для низкоскоростных приложений.Эти типы двигателей могут обеспечивать 100% крутящий момент при снижении до 60% базовой скорости. На Рисунке 3-14 показан двигатель TEFC.
Рисунок 3-14. Двигатель TEFC
В корпусе полностью закрытого типа с блочным охлаждением (TEUC) используется воздухо-воздушный теплообменник, а охлаждение осуществляется через внешний вентилятор. Воздуходувка всасывает воздух в теплообменник через воздухозаборник. Внутренний вентилятор обеспечивает циркуляцию охлаждающего воздуха внутри двигателя.Внешний и внутренний нагнетатели находятся в двух отдельных камерах, чтобы ограничить смешивание внешнего и внутреннего воздуха.
Эти типы двигателей могут обеспечивать 100% номинальный крутящий момент до 3 или 2% базовой скорости (приложения с постоянным крутящим моментом 20: 1). На рисунке 3-15 показан двигатель TEUC.
На рисунке 3-15 показан двигатель TEUC.
Рисунок 3-15. Двигатель TEUC
Как и любое электрическое устройство, двигатели должны быть защищены от вредных элементов, иначе их производительность и срок службы будут снижены.Такие элементы, как частицы углерода или металлической пыли, кислоты и соли, являются отличными проводниками. Эти материалы, влажные или сухие, могут проводить ток при очень низких напряжениях и через очень маленькие промежутки. Кроме того, вода или конденсат могут серьезно повредить изоляционную систему двигателя. Вода с химическими или минеральными добавками является проводником и может способствовать токам утечки, вызывая преждевременный выход из строя.
Во многих промышленных средах присутствуют маслянистые соединения, которые откладываются на всех поверхностях с течением времени.На этих поверхностях начинают накапливаться загрязнения, которые могут вызвать короткое замыкание в коммутаторах двигателей или щеточной оснастке. Здесь также могут возникать токи утечки, вызывающие длительное ухудшение изоляции двигателя и, в конечном итоге, выход двигателя из строя.
Здесь также могут возникать токи утечки, вызывающие длительное ухудшение изоляции двигателя и, в конечном итоге, выход двигателя из строя.
Следующие элементы необходимо периодически проверять для обеспечения безотказной работы.
Перегрузка двигателя — одна из причин перегрева. Высокая температура окружающей среды и грязные или забитые воздушные фильтры на воздуходувках машины или двигателя также способствуют отказам из-за перегрева.Высокая температура внутри двигателя вызывает напряжение расширения в изоляции провода, что приводит к трещинам, которые, в свою очередь, могут вызвать загрязнение и, в конечном итоге, выход провода из строя. Усадка и затвердевание лаковой изоляции проводов является причиной потери прочности изоляции.
Температура окружающей среды Типичные рекомендации: условия окружающей среды двигателя не должны превышать 40 ° C (104 ° F). Большинство двигателей рассчитаны на продолжительную работу при этой температуре окружающей среды.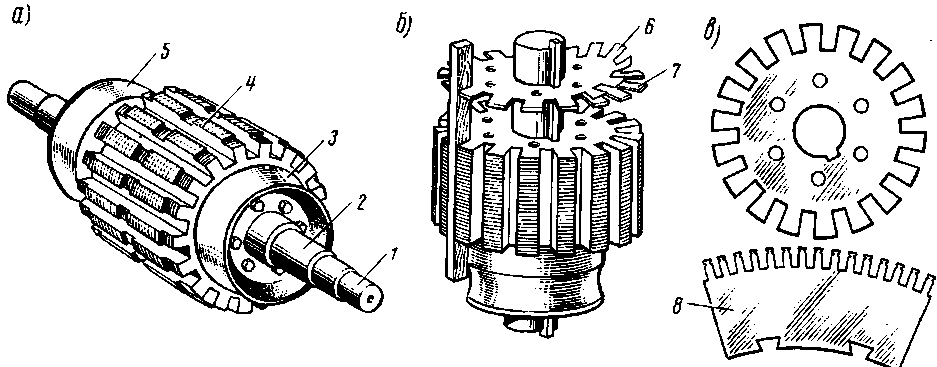 Однако двигатели, которые будут постоянно использоваться при более высоких температурах, обычно будут проектироваться с изоляцией с более низким классом превышения температуры.Изоляция двигателя постоянного тока
Однако двигатели, которые будут постоянно использоваться при более высоких температурах, обычно будут проектироваться с изоляцией с более низким классом превышения температуры.Изоляция двигателя постоянного тока
должна иметь механическую и диэлектрическую прочность. Он должен выдерживать обычное обращение, необходимое при сборке двигателя, а также его эксплуатацию после этого. Основными классами изоляции являются A, B, F и H, а краткое описание приводится ниже:
• Класс A — это самый низкий класс, подходящий для типичных бытовых приборов, но не для промышленного применения.
• Класс B — универсальный, используется во многих промышленных приложениях. Для более сложных условий эксплуатации требуется класс F или класс H.
• Класс H — это изоляция для тяжелых условий эксплуатации, способная выдерживать высокие температуры окружающей среды и внутренние температуры двигателя.
Нормальный срок службы изоляционной системы составляет от 10 000 до 15 000 часов работы в зависимости от температуры. Снижение температуры обмотки двигателя на 10 ° C удвоит срок службы изоляции. И наоборот, повышение температуры на 10 ° C сократит продолжительность жизни вдвое.
Снижение температуры обмотки двигателя на 10 ° C удвоит срок службы изоляции. И наоборот, повышение температуры на 10 ° C сократит продолжительность жизни вдвое.
Если вам нужна дополнительная информация, обратитесь к местному дистрибьютору двигателей, NEMA (Национальная ассоциация производителей электрооборудования) или к местному представителю EASA (Ассоциация по обслуживанию электрических устройств).
Если температура окружающей среды выше 50 ° C, особое внимание следует уделять смазочным материалам для подшипников и вала. При постоянном повышении температуры выше этого значения всегда следует консультироваться с производителем двигателя.
Вибрация вызывает такие проблемы, как напряжение вала и возможное короткое замыкание проводников между витками обмотки или между слоями обмоток. Сильная вибрация может вызвать трещины в лаковой изоляции, что приведет к загрязнению проводов.Проблемы с коммутацией могут также развиться из-за «подпрыгивания» щеток на коммутаторе. Продолжительные вибрации вызывают усталость металла, что может стать причиной преждевременного литья (рамы) или выхода подшипников из строя.
Продолжительные вибрации вызывают усталость металла, что может стать причиной преждевременного литья (рамы) или выхода подшипников из строя.
Стандартные характеристики двигателя основаны на работе на высоте до 3300 футов (1000 м) над уровнем моря. Многие производители рекомендуют пользователю снижать номинальную мощность двигателя на 1% на каждые 330 футов выше 3300 футов над уровнем моря. Причина в том, что на больших высотах воздух менее плотный (меньше молекул воздуха, отводящих тепло от корпуса двигателя).Чтобы уменьшить потребность
для понижения номинала, обычно достаточно установленного на двигателе вентилятора для охлаждения двигателя и предотвращения перегрева.
Большинство производителей двигателей поощряют покупку и использование термостата двигателя. Это устройство обычно представляет собой биметаллический диск или полосу, чувствительную к повышению температуры. Когда температура достигает заданного уровня, термостат действует как переключатель и размыкает цепь управления, которая, в свою очередь, отключает двигатель. (Когда привод подключен к двигателю, этот термостат подключается к вспомогательной цепи, которая отключает привод при возникновении условий перегрева.)
(Когда привод подключен к двигателю, этот термостат подключается к вспомогательной цепи, которая отключает привод при возникновении условий перегрева.)
Термостат установлен на коммутирующей катушке внутри двигателя, что означает, что устройству необходимо быть установленным во время производства. Стандартная конфигурация — нормально замкнутый контакт. Однако также доступны нормально открытые конфигурации.
Этот тип устройства обычно продается по цене около 150 долларов и является очень разумной страховкой от перегрева двигателя.При перегреве двигателя может произойти повреждение изоляции, что приведет к затратам на ремонт в тысячи долларов и дополнительным затратам в связи с простоями.
Типовые двигатели постоянного тока имеют номинальные характеристики, указанные на паспортной табличке. На рисунке 316 показана типовая паспортная табличка двигателя постоянного тока.
Рисунок 3-16. Паспортная табличка двигателя постоянного тока
• Рама: с указанием номинальной мощности рамы с учетом конкретной мощности и крутящего момента.
• HP: доступная мощность при указанных номинальных значениях напряжения и тока якоря и возбуждения.
• Усилители / полевые усилители: обозначения для усилителей якоря и полевых обмоток соответственно. Эти характеристики необходимы при программировании функций защиты в контроллере привода.
• База / макс. скорость: указывает номинальную скорость в об / мин при работе с номинальным током якоря и возбуждения, а также номинальную нагрузку. Индикация максимальной скорости представляет собой максимально возможную безопасную рабочую скорость, оставаясь в пределах ограничений двигателя.
Дополнительные характеристики включают тип корпуса, тип термостата, номинальную температуру окружающей среды, каталожный и серийный номер, а также тип и номинал тахометра.Эти рейтинги уже обсуждались. См. Раздел 5 «Устройства управления приводом и обратной связи» для получения дополнительной информации о тахометрах.
• Непрерывный режим: номинальные характеристики даны двигателям, которые будут непрерывно рассеивать все тепло, выделяемое внутренними потерями, без превышения номинального повышения температуры.
• Прерывистый режим (определенное время): номинальная мощность, присвоенная двигателю, который выдерживает номинальную нагрузку в течение определенного времени без превышения номинального повышения температуры.
• Прерывистый режим (неопределенное время): номинальные характеристики двигателя, которые обычно связаны с некоторой среднеквадратичной нагрузкой рабочего цикла.
• Пиковый крутящий момент: максимальный крутящий момент, который могут обеспечить двигатели постоянного тока, ограничен точкой нагрузки, в которой начинается разрушающая коммутация. Повреждение щетки и коллектора зависит от силы и продолжительности искрения. Пиковый крутящий момент ограничен максимальным током, который может выдать блок питания.
• Расчет крутящего момента: простой способ рассчитать доступный крутящий момент от двигателя постоянного тока — использовать следующую формулу:
, где:
Крутящий момент = крутящий момент, доступный от двигателя в фунт-футах, л.с. = паспортная мощность в лошадиных силах при базовой скорости Скорость = об / мин
В качестве примера предположим, что двигатель постоянного тока мощностью 10 л. с. имеет якорь на 240 В, 39.2 ампера со скоростью 1775/2750. Мы вставим необходимые числа в формулу и определим базовую скорость (1775) крутящий момент:
с. имеет якорь на 240 В, 39.2 ампера со скоростью 1775/2750. Мы вставим необходимые числа в формулу и определим базовую скорость (1775) крутящий момент:
Вышеупомянутая формула будет работать для определения крутящего момента на любой скорости вплоть до базовой. (Опять же, помните, что базовая скорость выражается в номинальных значениях: напряжение якоря, ток возбуждения и нагрузка.)
Чтобы определить коэффициент крутящего момента на ампер, просто разделите 29,5 на 39,2, что равно 0,75 фунт-фут крутящего момента на ампер. Определение отношения крутящего момента на ампер выше базовой скорости также возможно путем расчета крутящего момента, используя приведенную выше формулу для скорости по сравнению с базовой, а затем используя соотношение рассчитанного крутящего момента и показания амперметра на этой скорости.Как и ожидалось, развиваемый крутящий момент меньше базовой скорости по сравнению с базовой скоростью.
В основном, в промышленных приложениях используются четыре различных типа двигателей постоянного тока: с последовательной обмоткой, шунтирующей обмоткой, составной обмоткой и постоянным магнитом.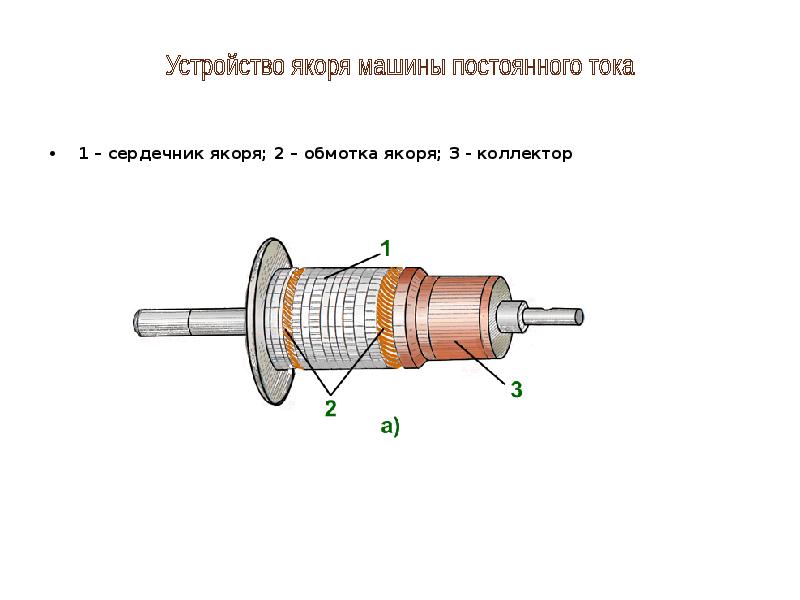 При выборе двигателя постоянного тока для конкретного применения необходимо учитывать несколько факторов.
При выборе двигателя постоянного тока для конкретного применения необходимо учитывать несколько факторов.
Во-первых, решите, какие допустимые изменения скорости и крутящего момента могут быть для данного изменения нагрузки.Каждый тип двигателя имеет преимущества, которые являются выгодными для определенных приложений. Следующий обзор поможет вам решить, какой двигатель может обеспечить лучшую производительность в данном приложении. Всегда следует консультироваться со спецификациями двигателя постоянного тока и привода, чтобы определить конкретную скорость и крутящий момент системы. Кривые скорости / крутящего момента, перечисленные ниже, предназначены для иллюстративных целей.
Двигатели постоянного тока серии
Двигатель постоянного тока с последовательной обмоткой имеет якорь и обмотки возбуждения, соединенные последовательно.На рис. 3-17 показан двигатель постоянного тока с последовательной обмоткой и соответствующая кривая скорости / момента.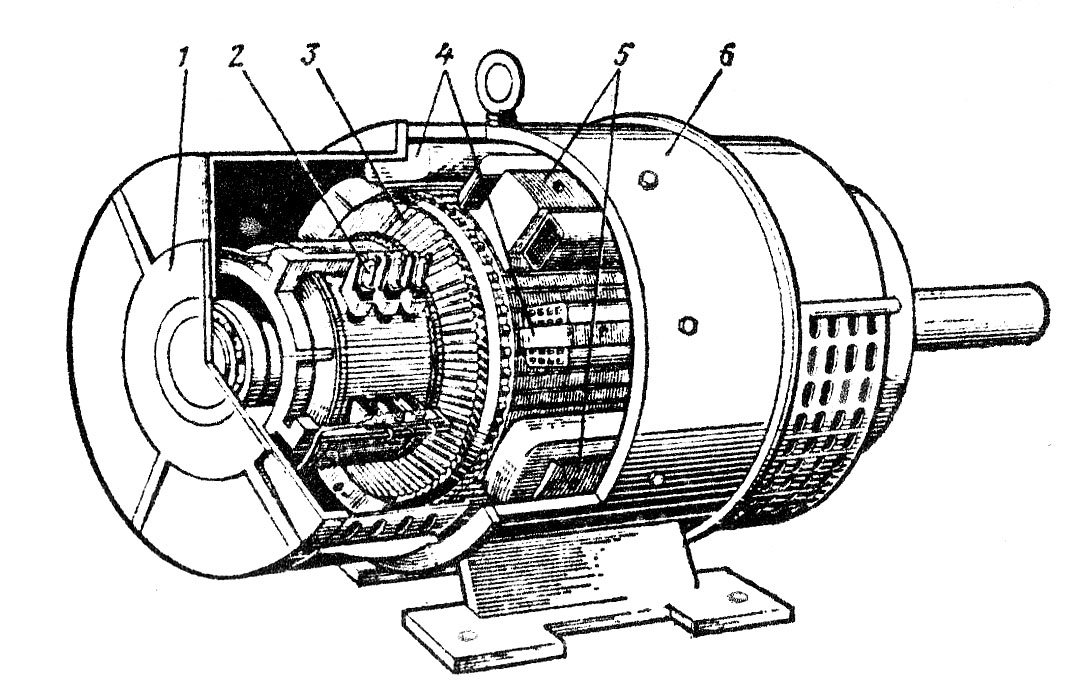
Как видно на Рисунке 3-17, этот тип конфигурации двигателя отличается очень высоким пусковым моментом. Типичные области применения этого двигателя — печатные станки, горнолыжные подъемники, электровозы, краны и буровые работы.
Развиваемый пусковой крутящий момент может достигать 500% от номинальной полной нагрузки. Высокий пусковой крутящий момент является результатом того, что обмотка возбуждения работает ниже точки насыщения.
Увеличение нагрузки вызовет соответствующее увеличение как якоря, так и тока обмотки возбуждения, что означает, что поток якоря и обмотки возбуждения увеличивается вместе.Как вы помните, крутящий момент, развиваемый в двигателе постоянного тока, является результатом взаимодействия потоков якоря и обмотки возбуждения. Крутящий момент в двигателе постоянного тока увеличивается как квадрат текущего значения.
Рисунок 3-17. Схема и кривая двигателя постоянного тока с последовательной обмоткой
Двигатель постоянного тока с последовательной обмоткой будет генерировать большее увеличение крутящего момента по сравнению с двигателем постоянного тока с параллельной обмоткой при заданном увеличении тока.
И наоборот, регулирование скорости двигателя постоянного тока с последовательной обмоткой хуже, чем у двигателя с параллельной обмоткой.Как указывалось выше, при увеличении нагрузки увеличивается ток якоря и обмотки возбуждения. Когда нагрузка уменьшается, уменьшается и ток, что вызывает соответствующее уменьшение плотности потока. Как напоминание об основах двигателя постоянного тока, когда магнитный поток поля уменьшается во время работы двигателя, происходит уменьшение «сдерживающей» электродвижущей силы (ЭДС). Следовательно, при уменьшении нагрузки скорость увеличивается. Если бы нагрузка была полностью снята, скорость двигателя увеличилась бы до бесконечности — в основном до тех пор, пока двигатель не разрушился бы сам.В качестве меры безопасности двигатели постоянного тока с последовательной обмоткой всегда следует подключать к нагрузке.
Двигатель постоянного тока с параллельной обмоткой имеет якорь и обмотки возбуждения, соединенные параллельно. На Рис. 3-18 показан двигатель постоянного тока с параллельной обмоткой и соответствующая кривая скорость / крутящий момент.
На Рис. 3-18 показан двигатель постоянного тока с параллельной обмоткой и соответствующая кривая скорость / крутящий момент.
Рисунок 3-18. Двигатель постоянного тока с параллельной обмоткой и кривая
Этот тип двигателя постоянного тока, вероятно, является наиболее широко используемым в промышленности. Как показано на рисунке, для этого типа двигателя требуются два источника питания — один для якоря и один для обмотки возбуждения.
Типичные области применения этого двигателя — печатные машины, лыжные подъемники, экструдеры для пластика, конвейеры и практически любое другое применение, где используются двигатели постоянного тока. Из-за необходимости в двух источниках питания этот тип двигателя является основным кандидатом для привода постоянного тока (преобразователя), который обычно включает в себя слаботочный возбудитель обмотки возбуждения (источник питания).
Этот тип двигателя с постоянным напряжением якоря и возбуждением обмотки возбуждения обеспечивает относительно стабильные характеристики скорости / момента. Развиваемый пусковой крутящий момент может составлять 250-300% номинального крутящего момента при полной нагрузке в течение короткого периода времени.Регулирование скорости (колебание скорости из-за нагрузки) допустимо во многих случаях в пределах 5-10% максимальной скорости при работе от привода постоянного тока. Регулирование этой величины было бы типичным при управлении от контроллера привода с разомкнутым контуром (без электронного устройства обратной связи, подключенного к валу двигателя). Как обсуждалось в разделе 5, устройства обратной связи по скорости, такие как тахометр-генератор, могут значительно улучшить регулирование (до менее 1%).
Развиваемый пусковой крутящий момент может составлять 250-300% номинального крутящего момента при полной нагрузке в течение короткого периода времени.Регулирование скорости (колебание скорости из-за нагрузки) допустимо во многих случаях в пределах 5-10% максимальной скорости при работе от привода постоянного тока. Регулирование этой величины было бы типичным при управлении от контроллера привода с разомкнутым контуром (без электронного устройства обратной связи, подключенного к валу двигателя). Как обсуждалось в разделе 5, устройства обратной связи по скорости, такие как тахометр-генератор, могут значительно улучшить регулирование (до менее 1%).
Из-за необходимости использования двух источников питания двигатель постоянного тока с параллельной обмоткой позволяет использовать упрощенное управление для требований реверсирования.Направление любого двигателя с шунтирующей обмоткой можно изменить, просто изменив направление тока на обратное, в обмотке якоря или шунтирующего возбуждения. Возможность реверсирования якоря или поля является стандартной для многих модулей привода постоянного тока. (Во многих случаях реверсирование потока и направления осуществляется в управлении обмоткой возбуждения. Обмотка возбуждения потребляет менее одной десятой тока по сравнению со схемой якоря. Меньшие компоненты и меньшая нагрузка на схему являются результатом, когда «реверсирование поля» ”Используется для управления двигателем постоянного тока.)
Возможность реверсирования якоря или поля является стандартной для многих модулей привода постоянного тока. (Во многих случаях реверсирование потока и направления осуществляется в управлении обмоткой возбуждения. Обмотка возбуждения потребляет менее одной десятой тока по сравнению со схемой якоря. Меньшие компоненты и меньшая нагрузка на схему являются результатом, когда «реверсирование поля» ”Используется для управления двигателем постоянного тока.)
Двигатель постоянного тока с комбинированной обмоткой в основном представляет собой комбинацию конфигураций с параллельной обмоткой и последовательной обмоткой. Этот тип двигателя обеспечивает высокий пусковой момент двигателя с последовательным заводом. Кроме того, он предлагает постоянное регулирование скорости (стабильность скорости) при заданной нагрузке. Этот тип двигателя используется в тех случаях, когда невозможно регулирование скорости ни от последовательного, ни от параллельного двигателя. На Рис. 3-19 показан двигатель постоянного тока с составной обмоткой и соответствующая кривая скорости / крутящего момента.
На Рис. 3-19 показан двигатель постоянного тока с составной обмоткой и соответствующая кривая скорости / крутящего момента.
Характеристики крутящего момента и скорости являются результатом включения части цепи обмотки возбуждения последовательно с цепью якоря. Эту дополнительную цепь обмотки якоря не следует путать с коммутирующей обмоткой или промежуточными полюсами. Коммутационные обмотки также имеют несколько витков, но призваны нейтрализовать реакцию якоря.
При приложении нагрузки происходит соответствующее увеличение тока через последовательную обмотку, что также увеличивает магнитный поток. Это, в свою очередь, увеличивает выходной крутящий момент двигателя.
Рисунок 3-19. Электродвигатель постоянного тока с комбинированной обмоткой и кривая
Двигатель с постоянными магнитами построен со стандартным якорем и щетками, но имеет постоянные магниты вместо обмотки шунтирующего поля. Характеристики скорости близки к характеристикам двигателя постоянного тока с параллельной обмоткой. Если добавить стоимость двигателя постоянного тока и системы управления, этот тип двигателя дешевле в эксплуатации, поскольку нет необходимости в шунтирующем питании возбудителя обмотки возбуждения.На рисунке 3-20 показан двигатель постоянного тока с постоянными магнитами и соответствующая кривая скорости / момента.
Характеристики скорости близки к характеристикам двигателя постоянного тока с параллельной обмоткой. Если добавить стоимость двигателя постоянного тока и системы управления, этот тип двигателя дешевле в эксплуатации, поскольку нет необходимости в шунтирующем питании возбудителя обмотки возбуждения.На рисунке 3-20 показан двигатель постоянного тока с постоянными магнитами и соответствующая кривая скорости / момента.
Рисунок 3-20. Электродвигатель постоянного тока с постоянными магнитами и кривая
Этот тип электродвигателя, помимо менее затратной эксплуатации, проще в установке, поскольку требуется только два соединения якоря. Этот тип двигателя также проще реверсировать — просто поменяйте местами соединения с якорем.
Полюса постоянных магнитов обычно изготавливаются из таких материалов, как керамика или альнико (алюминий, никель и кобальт).Керамические магниты используются для маломощных и низкоскоростных приложений из-за низкого уровня магнитного потока
. Хотя этот тип двигателя имеет хорошие эксплуатационные характеристики и более низкую стоимость, у этого типа двигателя есть несколько недостатков по сравнению с другими.
Хотя этот тип двигателя имеет хорошие эксплуатационные характеристики и более низкую стоимость, у этого типа двигателя есть несколько недостатков по сравнению с другими.
Такие материалы, как керамика, обладают высокой устойчивостью к размагничиванию. Однако постоянные магниты имеют тенденцию терять часть своей магнитной силы с течением времени и использования. Это уменьшение напряженности магнитного поля вызывает соответствующее уменьшение выходного крутящего момента.Чтобы противодействовать этой возможности, некоторые более дорогие двигатели с постоянными магнитами включают обмотки, встроенные в полевые магниты с целью «намагничивания» магнитов.
Помимо керамических или алнико-магнитов, редкоземельные магниты также являются экономичным средством создания потока магнитного поля. Этот тип магнитной группы включает «встроенный» магнит, который является только одним из девяти различных доступных магнитных материалов.
Хотя этот тип двигателя имеет очень хороший пусковой момент, скорость регулирования немного меньше, чем у двигателя с комбинированной обмоткой. Общий выходной крутящий момент делает этот двигатель лучшим кандидатом для приложений с низким крутящим моментом. Пиковый крутящий момент ограничен примерно 150%. Это ограничение основано на том факте, что дополнительное «размагничивание» полюсов поля могло произойти, если бы был развит больший крутящий момент.
Общий выходной крутящий момент делает этот двигатель лучшим кандидатом для приложений с низким крутящим моментом. Пиковый крутящий момент ограничен примерно 150%. Это ограничение основано на том факте, что дополнительное «размагничивание» полюсов поля могло произойти, если бы был развит больший крутящий момент.
считаются «специальными» в том смысле, что они используются в приложениях, требующих очень быстрого отклика по скорости и точности. Во многих случаях частота вращения вала увеличивается с нуля до 6000 об / мин за сотые доли секунды.Такой же профиль скорости может потребоваться в режиме замедления, а также при немедленном изменении направления движения.
Эти типы двигателей должны быть спроектированы так, чтобы выдерживать нагрузку от ускорения, а также не колебаться в скорости после достижения желаемой скорости. Особое внимание уделяется отводу тепла, поскольку эти двигатели должны быть небольшими, но при этом генерировать достаточный крутящий момент для работы машины. Небольшой размер позволяет двигателю этого типа помещаться в небольших упаковочных, паллетоупаковочных и перерабатывающих машинах.Обычно эти двигатели длинные и узкие, в отличие от стандартных двигателей постоянного тока с шунтирующей обмоткой. Длинная и узкая конструкция позволяет создавать узлы якоря с низким моментом инерции, которые можно быстро разогнать. Конструкция серводвигателя с постоянными магнитами обеспечивает минимально возможное пространство. Для сравнения, обмотки шунтирующего поля должны иметь достаточно широкие пластинки, чтобы генерировать необходимый магнитный поток поля, который увеличивает общую ширину машины. На Рис. 3-21 показан внешний вид типичного серводвигателя постоянного тока.
Небольшой размер позволяет двигателю этого типа помещаться в небольших упаковочных, паллетоупаковочных и перерабатывающих машинах.Обычно эти двигатели длинные и узкие, в отличие от стандартных двигателей постоянного тока с шунтирующей обмоткой. Длинная и узкая конструкция позволяет создавать узлы якоря с низким моментом инерции, которые можно быстро разогнать. Конструкция серводвигателя с постоянными магнитами обеспечивает минимально возможное пространство. Для сравнения, обмотки шунтирующего поля должны иметь достаточно широкие пластинки, чтобы генерировать необходимый магнитный поток поля, который увеличивает общую ширину машины. На Рис. 3-21 показан внешний вид типичного серводвигателя постоянного тока.
Как видно на Рис. 3-21, этот тип двигателя обычно имеет полностью закрытую конструкцию, чтобы изолировать большую часть влаги, пыли и умеренных загрязнений. Физическая рама двигателя действует как теплоотвод для отвода выделяемого тепла.
Рисунок 3-21. Серводвигатель постоянного тока с C-торцевой установкой
Многие серводвигатели используются специально для позиционирования.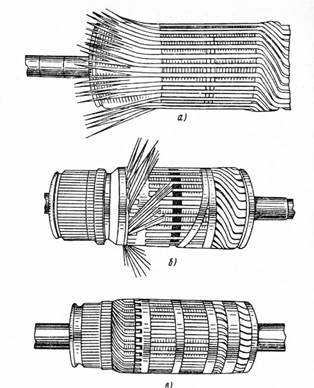 Поэтому конструкция двигателя позволяет использовать устройство обратной связи по положению, такое как энкодер или резольвер. Монтаж серводвигателя может быть легко выполнен с помощью торца «C» (без фланца, но с резьбовыми отверстиями для установки монтажных болтов) или фланца «D» (внешний фланец со сквозными отверстиями).
Поэтому конструкция двигателя позволяет использовать устройство обратной связи по положению, такое как энкодер или резольвер. Монтаж серводвигателя может быть легко выполнен с помощью торца «C» (без фланца, но с резьбовыми отверстиями для установки монтажных болтов) или фланца «D» (внешний фланец со сквозными отверстиями).
Принцип работы серводвигателя с постоянными магнитами точно такой же, как и у стандартного двигателя постоянного тока с постоянными магнитами. Он имеет якорь, коммутатор и поле ФЭУ для магнитного взаимодействия. Разница заключается в физических размерах и форме серводвигателя, а также в характеристиках производительности и скорости.
Другой тип серводвигателя постоянного тока использует характеристики высокого крутящего момента и ускорения, но без использования коммутатора или щеток.Этот тип, называемый бесщеточным серводвигателем постоянного тока, принимает входную трехфазную или однофазную входную мощность и преобразует ее в постоянный ток, используемый обмотками двигателя. Обмотки создают магнитный поток, который взаимодействует с полем PM для создания скорости и крутящего момента двигателя. На рис. 3-22 показана конструкция бесщеточного серводвигателя постоянного тока.
Обмотки создают магнитный поток, который взаимодействует с полем PM для создания скорости и крутящего момента двигателя. На рис. 3-22 показана конструкция бесщеточного серводвигателя постоянного тока.
Как видно на рис. 3-22, вместо постоянных магнитов, установленных в качестве поля, магниты фактически являются частью ротора. (Примечание: поскольку нет щеток или коммутатора, термин «ротор» используется вместо якоря, указывая на конструкцию машины переменного тока.) Типичный бесщеточный серводвигатель постоянного тока может иметь несколько полюсов, например, три N и три S. В статоре также должны быть соответствующие обмотки для создания магнитного взаимодействия. (Примечание. Поскольку это машина переменного тока, термин «статор» используется вместо «возбуждение» или «обмотки возбуждения».)
Рисунок 3-22. Бесщеточный серводвигатель постоянного тока (конструкция и управление)
Ротор серводвигателя обычно представляет собой ламинированное железо со вставленными магнитами, запрессованными или закрепленными эпоксидной смолой. Специальные высокоскоростные подшипники поддерживают ротор на месте. Вместо стандартной распределительной коробки серводвигатели обычно включают в себя разъем в стиле милитари. В этом стиле все соединения выполнены на одной вилке или розетке с навинчивающимся кольцом для обеспечения положительного контакта. Этот тип разъема устойчив к вибрации машины и электрическим помехам.
Специальные высокоскоростные подшипники поддерживают ротор на месте. Вместо стандартной распределительной коробки серводвигатели обычно включают в себя разъем в стиле милитари. В этом стиле все соединения выполнены на одной вилке или розетке с навинчивающимся кольцом для обеспечения положительного контакта. Этот тип разъема устойчив к вибрации машины и электрическим помехам.
Серводвигатель принимает входную мощность и преобразует ее в постоянный ток для основных обмоток статора. В зависимости от конструкции серводвигателя в блок управления могут входить транзисторы, которые включаются или выключаются для генерации напряжения.В случае трехфазного серводвигателя подключается внешний сервоусилитель для генерирования управляющего напряжения для обмоток статора.
Основным недостатком этого мотора является невозможность развивать высокий пусковой момент. В случае однофазного серводвигателя половина основных обмоток используется в любой момент времени. Это приводит к несколько высоким потерям в меди.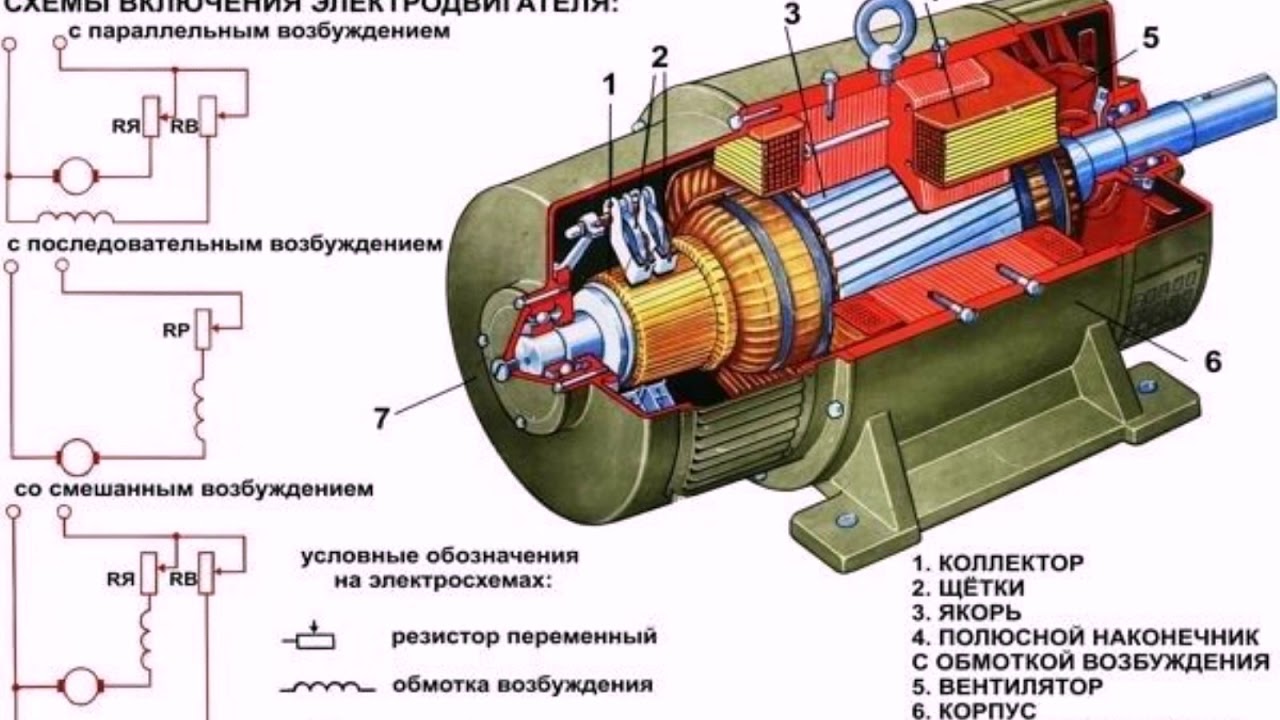 Однако, поскольку для управления бесщеточным серводвигателем постоянного тока используется переключение транзисторов, срок службы двигателя в основном ограничивается подшипниками, так как нет сегментов коммутатора или щеток, которые могли бы изнашиваться.
Однако, поскольку для управления бесщеточным серводвигателем постоянного тока используется переключение транзисторов, срок службы двигателя в основном ограничивается подшипниками, так как нет сегментов коммутатора или щеток, которые могли бы изнашиваться.
Как рассчитать новые параметры двигателя постоянного тока для модифицированной обмотки
Все чаще разработчики оборудования, использующие серводвигатели постоянного тока, обнаруживают, что им нужны индивидуальные обмотки двигателя, соответствующие конкретным приложениям. Например, при модернизации габариты и площадь основания двигателя могут уже существовать, но его рабочие характеристики больше не подходят. Или, из-за экономии на оборудовании, OEM-разработчик малосерийного или единичного оборудования по индивидуальному заказу может предпочесть не изменять физические характеристики двигателя, а необходимо изменить рабочие характеристики в соответствии с индивидуальными приложениями.
Изменение якоря и обмотки влияет на многие параметры, включая постоянную крутящего момента K t , постоянную напряжения K e , сопротивление якоря Ra и индуктивность якоря L, a .
Пользователям двигателей было бы очень полезно иметь способ быстро вычислять новые параметры двигателя и оценивать их влияние на сервосистему. Смена обмотки — это не что иное, как новая комбинация количества витков катушки и калибра провода магнита.Процедура проста, если вы определите «точки нагрузки». В зависимости от приложений каждая точка нагрузки определяется крутящим моментом и скоростью, которые необходимы серводвигателю для выполнения своих задач.
Мощность двигателя
Мы должны пересмотреть некоторые показатели качества, которые доминируют в конструкции двигателей постоянного тока; определение параметров двигателя, на которые влияют изменения обмоток; и их внутренняя взаимосвязь. Для начала давайте определим выходную мощность двигателя как произведение крутящего момента и скорости, измеренных на валу двигателя для определенной точки нагрузки, то есть:
P выход = Ts (1)
где
P out = Выходная мощность, Вт
T = крутящий момент, Нм
с = Скорость вала, рад / с
или
P выход = Tn /7. 04 (1а)
04 (1а)
где
P out = Выходная мощность, Вт
T = крутящий момент, фунт-фут
n = частота вращения вала, об / мин
Уравнение (1) показывает, что для получения такой же продолжительной выходной мощности при более высоком крутящем моменте необходимо только пропорциональное снижение скорости. И наоборот, более высокая скорость при той же выходной мощности означает изменение крутящего момента, обратно пропорциональное увеличению скорости.
Из-за неэффективности не вся входная мощность, P в , к двигателю становится выходной мощностью.Разница между P в и P из составляет потери двигателя. Параметры двигателя постоянного тока зависят от способности двигателя рассеивать тепло, создаваемое потерями, без превышения максимальной рабочей температуры. Существуют ограничения на выходную мощность с точки зрения крутящего момента, скорости или того и другого.
Новая обмотка не должна снижать максимальную безопасную температуру для данного типоразмера двигателя. Поскольку первоначальный нагрев обычно происходит от тока якоря, это автоматически устанавливает максимально допустимый ток в обмотках якоря в течение заданного времени.Максимальный ток также ограничивает величину крутящего момента на выходном валу, который может создать двигатель. Разработчик также определяет максимальную безопасную скорость для двигателя, обычно в зависимости от диаметра его ротора или, если это щеточный двигатель, от количества сегментов коллектора. Другими словами, будут пределы способности двигателя соответствовать желаемым точкам нагрузки.
Постоянные двигателя
Крутящий момент двигателя прямо пропорционален развиваемому току в обмотках якоря, таким образом:
T = K т I (2)
где
T = крутящий момент, Нм
K t = постоянный крутящий момент двигателя, Нм / А
I = Ток обмотки якоря, А или
T = [2.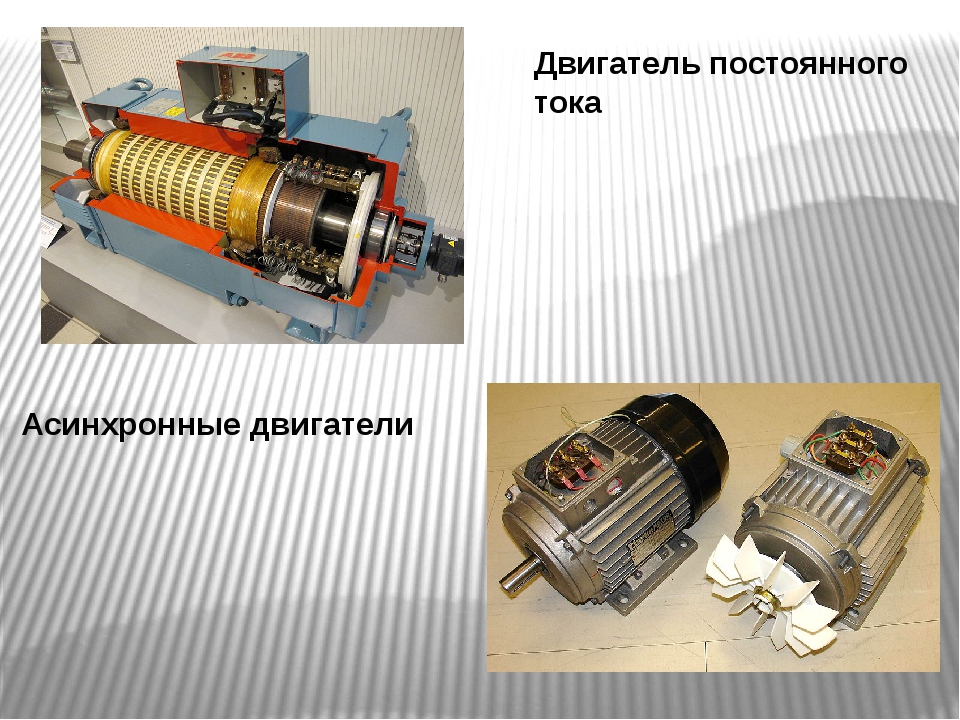 254310 -7 ( zΦp / a )] I (2a)
254310 -7 ( zΦp / a )] I (2a)
где
T = крутящий момент, унция-дюйм.
z = эффективное количество последовательных проводников на катушку
Φ = Магнитный поток в полотнах, wb
p = Количество полюсов
a = Частота вращения вала, об / мин
I = ток, А
Продолжить на странице 2
В уравнении (2) ток I может иметь максимальное пиковое значение Ipeak , которое дает максимальный крутящий момент Tpeak .Продолжительное использование Ipeak вредит двигателю, поскольку он нагревается до высоких температур. Кроме того, превышение значения Ipeak приводит к размагничиванию магнитов двигателя.
Скорость двигателя прямо пропорциональна входному напряжению E , приложенному к клеммам двигателя, таким образом:
с = E / Ke (3)
где
с = Скорость вала, рад / с
E = Входное напряжение, приложенное к клеммам двигателя, В
Ke = постоянное напряжение двигателя, В / (рад в секунду)
Постоянная напряжения, Ke , иногда также называется постоянной обратной ЭДС. Кроме того, если оно дано в единицах В / (krpm) (вольт на тысячу об / мин), тогда скорость вала s будет в krpm. Ke полностью зависит от конструкции двигателя. Константы Kt и Ke имеют одинаковое числовое значение в Международной системе единиц (СИ). В английской системе они соотносятся так:
Кроме того, если оно дано в единицах В / (krpm) (вольт на тысячу об / мин), тогда скорость вала s будет в krpm. Ke полностью зависит от конструкции двигателя. Константы Kt и Ke имеют одинаковое числовое значение в Международной системе единиц (СИ). В английской системе они соотносятся так:
Kt = 1,3524 Ke (4)
когда
Kt в унциях-дюймах / A
и
Ke в В / (оборотах в минуту)
Уравнение (4) показывает, что постоянная напряжения также прямо пропорциональна эффективному количеству последовательных проводников на катушку, магнитному потоку и количеству полюсов.Здесь мы сосредоточимся на том, как быстро рассчитать новые Kt и Ke , вызванные сменой обмотки.
Константы обмотки
Помимо влияния на Kt и Ke , новая обмотка влияет на другие параметры, такие как сопротивление и индуктивность. Сопротивление якоря изменяется, поскольку оно зависит от удельного сопротивления, длины и площади провода:
R = Qcul / A (5)
где
Qcu = Удельное сопротивление меди, Ом-м
l = Длина провода, м
А = Площадь сечения провода, м2
Изменение обмотки также вызывает изменение индуктивности, потому что индуктивность зависит от общего магнитного потока, проходящего через катушку с заданным числом витков, и тока, связанного с катушкой:
L = NΦ / I (6)
где
L = Индуктивность в генри, H
N = Количество витков в катушке
Φ = Полный магнитный поток в сетках, wb
А = Площадь сечения провода, м2
Таким образом, можно написать:
Φ = NIA / л
где
l = Длина провода в бухте, м
Это значение f в уравнении (6) дает
L = N 2 A / l (6a)
Уравнение (6a) показывает, что индуктивность якоря пропорциональна квадрату числа витков.
Сопротивление и индуктивность якоря — важные показатели для пользователей серводвигателей. Постоянные времени двигателя изменяются при изменении сопротивления или индуктивности — или и того, и другого. Электрическая постоянная времени — это соотношение индуктивности и сопротивления обмотки:
te = левая / правая (7)
где
te = электрическая постоянная времени, сек Механическая постоянная времени
tm = RJ / KtKe (8)
где
J = Момент инерции ротора, кг-м2, и все уравнение выражено в единицах СИ.
Продолжить на странице 3
Метод
Уравнения (2) — (8) показывают, что многие постоянные двигателя и другие показатели качества зависят от конфигурации обмотки. Следовательно, изменение этих параметров повлияет на источники питания пользователя, а также на сервоуправление. Разработчик сервосистемы извлекает выгоду из поиска точных значений этих констант и параметров двигателя, не дожидаясь, пока разработчик двигателя спроектирует новую обмотку.
Следуют два простых и понятных предположения без потери общности:
• Имеющийся двигатель, который подвергнется замене обмотки, удовлетворительно работает в желаемой точке полной нагрузки.
• Достаточное заполнение паза обмотки двигателя.
Если первое предположение верно, то двигатель работает с приемлемым КПД, а потери в обмотке не влияют на допустимую максимальную температуру двигателя.
Если верно второе предположение, то новые расчеты обмотки гарантируют адекватное заполнение пазов, то есть хорошее использование меди и железа.
Предположим, что пользователь серводвигателя хочет изменить обмотку двигателя, чтобы двигатель работал на более высокой новой скорости без изменения напряжения источника питания.Это немедленно требует уменьшения постоянной напряжения и, следовательно, постоянного крутящего момента.
Взгляд на уравнения (2) и (3) показывает, что для новой обмотки требуется меньше витков, поскольку, как было показано ранее, Ke и Kt прямо пропорциональны эффективному числу витков.
Прямое уменьшение количества витков оставило бы некоторое пустое место в слотах. Ради эффективности, область прорези должна быть заполнена хорошим процентным содержанием меди, обычно около 60%, но, возможно, почти на 100%.Магнитный провод большего диаметра необходим, чтобы избежать «низкого заполнения щели». Проволока большего размера заполняет пустую область слота.
Магнитный провод бывает только определенного калибра или диаметра, поэтому разработчик двигателя может выбрать только фиксированное количество вариантов. В системе American Wire Gage соотношение площадей поперечного сечения проводов между любыми двумя последовательными калибрами всегда составляет около 1,26. Кроме того, номер калибра увеличивается с уменьшением диаметра проволоки. Например, площадь калибра магнитной проволоки 20 AWG удваивается при замене калибра трех проводов на калибр 17 AWG, потому что ее площадь увеличивается во столько же раз, 1.26, для каждой последующей смены манометра, как в таблице 1.
Пример
Рассмотрим, например, что у вас есть новая потребность в двигателе, требующая увеличения скорости в 2,5 раза без изменения входного напряжения от источника питания. Кроме того, двигатель должен работать с той же выходной мощностью и эффективностью, что и раньше. Кроме того, нынешняя обмотка имеет 45 витков 25 AWG на катушку.
Уравнение (1) показывает, что требуемый крутящий момент должен быть в 2,5 раза меньше. Согласно уравнению (3) постоянная напряжения двигателя Ke также должна быть уменьшена в 2 раза.5. Отсюда следует, что для уменьшения Ke в 2,5 раза достаточно уменьшить количество витков в 2,5 раза. Но от этого слот становится меньше в 2,5 раза. Чтобы лучше заполнить прорези, вы должны найти новый калибр.
Проблема сводится к необходимости решить количество сечений, на которое необходимо увеличить исходный провод, чтобы новое меньшее количество витков заняло ту же площадь слота. Другими словами, найдите значение r в этом соотношении:
кт (1. 26) r = уз / 2,5
26) r = уз / 2,5
где
r = Количество изменений размера AWG
из которых
1,26 r = 1 / 2,5
или
r журнал (1,26) = журнал (0,4)
Решение для r ,
r = -4
, то есть на четыре сечения провода меньше, что на четыре сечения больше.
Таким образом, новая обмотка будет иметь
45/2.5 = 18 витков провода
25-4 = размер 21 AWG.
Поскольку сопротивление якоря зависит как от длины, так и от площади проводника, новое сопротивление якоря будет:
Rновый = Rold /( 1.262) R
с
r = 4
из которых
Rновый = Rold / 6,35
Поскольку индуктивность якоря пропорциональна квадрату числа витков, новая индуктивность якоря будет равна
.Lnew = Lold / (1.262) р
с
r = 4
, что означает, что новая индуктивность также уменьшена в 6,35 раза.
Поскольку площадь провода в новой обмотке увеличивается, проводник может выдерживать более высокий ток. Увеличение пропорционально новой площади провода. Из уравнений (1) и (2) вы можете сделать вывод, что новый пиковый ток может быть
1,26 r = 1,264
Враза больше, чем прежний пиковый ток. Кроме того, новое максимальное напряжение постоянного тока (для сохранения той же максимальной потребляемой мощности) уменьшается на пропорционально 1.264.
Предыдущие вычисления показывают, что изменения между старыми и новыми константами включают только коэффициент 1,26 и количество изменений шага калибра r . Основная часть работы заключается в том, чтобы просто найти значение r и использовать его для нахождения новых значений параметров двигателя.
Предупреждение: хотя этот простой метод применим к щеточным и бесщеточным двигателям постоянного тока, имейте в виду, что сопротивление щетки не учитывалось в уравнениях.