
Строение ротора асинхронного двигателя — Морской флот
Немало техники — бытовой, строительной, производственной имеют двигатели. Если задаться целью и проверить тип мотора, в 90% окажется, что стоит асинхронный двигатель. Это обусловлено простотой конструкции, высоким КПД, отсутствием электрического контакта с движущейся частью (в моделях с короткозамкнутым ротором). В общем, причин достаточно.
Что такое асинхронный двигатель и принцип его действия
Любой электродвигатель — устройство для преобразования электрической энергии в механическую. Электрический двигатель состоит из неподвижной (статор) и подвижной части (ротор). Строение статора таково, что он имеет вид полого цилиндра, внутри которого имеется обмотка. В это цилиндрическое отверстие вставляется подвижная часть — ротор. Он также имеет вид цилиндра, но меньшего размера. Между статором и ротором имеется воздушный зазор, позволяющий ротору свободно вращаться. Ротор вращается из-за наводимых магнитным полем статора токов. По способу вращения двигатели делят на синхронные и асинхронные.

Так выглядит разобранный асинхронный двигатель с короткозамкнутым ротором
Асинхронный электродвигатель отличается тем, что частота вращения ротора и магнитного поля, создаваемого статором, у него неравны. То есть, ротор вращается несинхронно с полем, что и дало название этому типу машин. Характерно, в рабочем режиме скорость его вращения меньше. Второе название этого типа двигателей — индукционные. Это название связано с тем, что движение происходит за счёт наводимых на нём токов индукции.

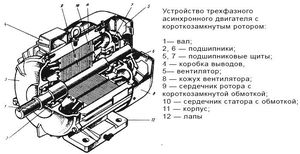
Асинхронный двигатель в разобранном виде: основные узлы и части
Коротко описать принцип работы асинхронного двигателя можно так. При включении мотора на обмотки статора подаётся ток, из-за чего возникает переменное магнитное поле. В область действия силовых линий этого попадает ротор, который начинает вращаться вслед за переменным полем статора.
Статор
Статор асинхронного двигателя состоит из трёх частей: корпуса, сердечника и обмотки. Корпус статора служит в качестве опоры для электродвигателя. Изготавливают его из стали или чугуна, сваркой или литьём. К прочности корпуса предъявляются высокие требования, так как при работе возникают вибрации в результате которых может сместиться ротор, что приведёт к заклиниванию мотора и выходу его из строя.

Статор асинхронного двигателя
Есть и ещё одно требование — геометрия корпуса должна быть идеальной. Между обмоткой статора и ротором зазор делают в несколько миллиметров, так что малейшие отклонения могут быть критичны.
Сердечник статора
Сердечник статора асинхронного электродвигателя изготавливают из наборных металлических пластин. Так как сердечник является магнитопроводом, металл используется магнитная электротехническая сталь. Для уменьшения потерь из-за вихревых потоков сердечник набирается из пластин, покрытых слоем диэлектрика (лак).

Сердечник статора набирается из тонких металлических изолированных пластин
Толщина одной пластины — 0,35-0,5 мм. Они собираются в единый пакет, так чтобы пазы всех пластин совпадали. В эти пазы затем укладываются витки обмотки.
Обмотка статора и количество оборотов электродвигателя
Статор асинхронного электромотора чаще всего имеет трёхфазную обмотку возбуждения. Она называется так, потому что является причиной движения ротора. Обмотка статора состоит из катушек, навитых из медной проволоки которые укладываются в пазы сердечника. Каждая обмотка может состоять из нескольких витков проволоки или из одного витка. Провод используется специальный, с лаковым покрытием, которое изолирует витки друг от друга и от стенок сердечника.
Как уже говорили, чаще всего обмотка статора асинхронного двигателя имеет три фазы. В этом случае оси катушек расположены со сдвигом 120°. При таком строении магнитное поле имеет два полюса и делает один полный оборот за один цикл трёхфазного питания. При частоте в электросети равной 50 Гц, скорость вращения поля (и ротора) 50 об/сек или 3000 об/мин.

Укладка катушек обмотки статора асинхронного двигателя
Для уменьшения скорости вращения ротора в асинхронном двигателе обмотку делают с большим количеством полюсов. Так с четырехполюсным стартером скорость вращения будет вдвое меньше — 1500 об/мин. Обмотка с шестью полюсами статора даёт втрое меньшую скорость — 1000 об/мин. С восемью полюсами — в четыре раза меньше, т. е. 750 об/мин. Ещё более «медленные» электромоторы делают очень редко.
Концы обмоток статора выводятся на клеммную коробку корпуса. Тут они могут соединяться по принципу «звезда» или «треугольник» в зависимости от типа подаваемого питания (220 В или 380 В).
Ротор
Ротор асинхронного электродвигателя бывает двух видов: короткозамкнутым и фазным. Чаще всего встречаются машины с короткозамкнутым ротором. Их преимущество в простоте конструкция и несложной технологии изготовления. Что еще важно, в таких моторах отсутствует контакт с динамической конструкцией. Это повышает долговечность, делает обслуживание более редким и простым.

Асинхронный двигатель может быть с короткозамкнутым и фазным
Асинхронные электромоторы с фазным ротором имеют более сложную конструкцию. Но они позволяют плавно регулировать скорость без дополнительных устройств, со старта имеют высокий крутящий момент. Так что приходится выбирать: более простая конструкция или возможность регулировки скорости вращения.
Устройство короткозамкнутого ротора
Ротор состоит из вала и цилиндрической конструкции из короткозамкнутых стержней. Внешне эта конструкция очень напоминает беличье колесо, поэтому так часто называют короткозамкнутую обмотку ротора.

Устройство короткозамкнутого ротора
Изначально и стержни, и замыкающие кольца изготавливались из меди. Роторы современных асинхронных двигателей мощностью до 100 кВт делают из алюминиевых стержней, с алюминиевыми же замыкающими дисками. Расстояние между стержнями заливается снова-таки алюминиевым сплавом. Получается короткозамкнутый ротор, но уже со сплошным покрытием.
Так как при работе выделяется значительное количество тепла, для охлаждения перемычки «беличьего колеса» делают с дополнительными вентиляционными лопатками. Так во время работы происходит самоохлаждение. Оно работает тем эффективнее, чем выше скорость вращения.

Как устроен асинхронный двигатель: устройство и компоновка деталей
Ротор устанавливается в статор, концы вала фиксируются при помощи крышек с вмонтированными подшипниками. Это двигатель без щеток (безщеточный). Никаких дополнительных контактов и электрических соединений. Подвижная часть мотора начинает вращаться при наличии магнитного поля на статоре. Оно возникает после подачи питания. Это поле вращается, заставляя вращаться и предметы, которые находятся в его поле. Простая и надёжная конструкция, которая обусловила популярность электрических двигателей этого типа.
Как сделан фазный ротор
Устройство фазного ротора мало чем отличается от обмотки статора. Те же наборные кольца с пазами под укладку медных катушек. Количество обмоток ротора три, соединены они обычно «звездой».

Так выглядит фазный ротор асинхронного двигателя
Концы роторных обмоток крепят к контактным кольцам из меди. Эти кольца жёстко закреплены на валу. Кроме того, они обязательно изолированы между собой, не имеют электрического контакта со стальным валом (крепятся к стержню через диэлектрические прокладки). Так как наличие колец отличительная черта этого типа движков, иногда их называют кольцевыми.

Асинхронный двигатель с фазным ротором
Для фиксации ротора к корпусу статора делают две крышки с подшипниками. На одной из крышек закрепляются щетки, которые прижимаются к кольцам на валу, за счёт чего имеют с ними хороший контакт. Для регулировки скорости вращения щетки соединены с реостатом. Изменяя его сопротивление, меняем напряжение, а с ним и скорость вращения.
Что лучше короткозамкнутый или фазный?
Несмотря на то что двигатели с фазовым ротором лучше стартуют, позволяют в процессе работы плавно менять скорость при помощи обычного реостата, чаще применяется моторы короткозамкнутого типа. В этой конструкции отсутствуют щетки, которые выходят из строя первыми. Кроме того, более простое устройство подвижной части снижает стоимость двигателя, агрегат служит дольше, уход и техобслуживание проще.

Какой лучше: короткозамкнутый ротор или фазный
Тем не менее стоит более подробно ознакомиться с достоинствами и недостатками обоих типов асинхронных двигателей. Итак, достоинства короткозамкнутого асинхронного двигателя:
- Простая конструкция.
- Лёгкое обслуживание.
- Более высокий КПД.
- Нет искрообразования.
- Малый пусковой крутящий момент.
- Высокий пусковой ток (в 4-7 раз выше номинального).
- Нет возможности регулировать скорость.

Магнитное поле трехфазного статора толкает ротор
Из-за высокого пускового тока прямое включение допускается для двигателей мощностью до 200 кВт. Более мощные требуют пускорегулирующей аппаратуры. Обычно используют частотный преобразователь, который плавно увеличивает ток, обеспечивая плавный старт без перегрузок.
Преимущество асинхронного фазного двигателя:
- Быстрый и беспроблемный старт.
- Позволяет менять скорость в процессе работы.
- Прямое подключение возможно, практически без ограничения мощности.
Недостатки тоже есть: наличие щёток, возможность искрения, сложное и частое обслуживание.
Как регулируется частота вращения
Как уже писали, частота вращения ротора зависит от количества полюсов статора. Чем больше количество полюсов, тем меньше скорость. Но это не только так можно регулировать скорость вращения. Она еще зависит от напряжения и частоты питания.

Способы регулирования частоты асинхронного двигателя
Напряжение можно регулировать, установив потенциометр на входе. Частоту регулируют поставив частотный преобразователь. Частотник — более выгодное решение, так как он ещё и снижает стартовые токи и может быть программируемым.
Однофазный асинхронный двигатель
Выше рассматривался трехфазный асинхронный двигатель, в однофазном асинхронном двигателе их две. Одна рабочая, вторая вспомогательная. Вспомогательная нужна для того, чтобы придать первоначальное вращение ротору. Потому может называться ещё пусковой или стартовой.

Однофазный асинхронный двигатель имеет две обмотки: рабочую и вспомогательную (стартовую или пусковую)
Когда в статоре включена одна обмотка, она создаёт два равных магнитных поля, вращающихся в разные стороны. Если ввести в это поле ротор, который уже имеет какое-то начальное вращение, магнитное поле будет поддерживать это вращение. Но как запустить ротор на старте? Как придать ему вращение, ведь от одной обмотки возникают два равноценных магнитных поля, направленные в разные стороны. Так что с их помощью заставить вращаться ротор невозможно. В простейшем варианте вращение задаётся вручную — механически. Затем вращение подхватывает поле.
Чтобы автоматизировать запуск однофазного асинхронного двигателя и сделана вспомогательная обмотка. Она сконструирована так, что подавляет одну из составляющих магнитного поля основной обмотки и усиливает вторую. Соответственно, одна из составляющих перевешивает, задавая вращение ротора. Затем стартовая обмотка отключается, вращение поддерживает основная.

Широкое распространение асинхронного электродвигателя (АД) вызвано его надежностью и простотой конструкции. Статор такого двигателя стандартный, представляет собой изготовленный из пластин электростатической стали полый цилиндр с трехфазной обмоткой. Ротор же может быть короткозамкнутым и фазным. Последний вариант получил более широкое распространение по ряду причин, хотя его конструкция намного сложнее, чем у короткозамкнутого ротора.

Конструкция фазного ротора
Фазный ротор АД конструктивно напоминает его статор. Основа ротора набирается из пластин электростатической стали, которые насаживаются на вал. Конструкция имеет продольные пазы, в которые укладываются витки катушек фазной обмотки. Количество фаз ротора строго соответствует количеству фаз статора. Для подключения обмотки ротора к цепи, на валу последнего устанавливаются 3 контактных кольца, к которым подведены концы обмотки, находящиеся в соприкосновении с токопроводящими щетками. В свою очередь щетки имеют выходы в коробку корпуса, что позволят подключать внешнее дополнительное сопротивление.
В зависимости от напряжения сети, фазы обмотки соединяются “треугольником” или “звездой”. Оси катушек двухполюсного электродвигателя смещены на 120 градусов относительно друг друга.
Контактные кольца изготавливаются из латуни или стали. На вал они посажены с обязательной изоляцией между собой. Щетки расположены на щеткодержатле, изготовлены из металлографита, к кольцам прижимаются посредством пружин.
Зачем нужно добавочное сопротивление?
Добавочное сопротивление служит для запуска двигателя с нагрузкой на его валу. Как только достигаются номинальные обороты вала, сопротивление отключается за ненадобность, а кольца закорачиваются. В противном случае работа электродвигателя будет нестабильной, возникнут потери КПД.
Роль добавочного внешнего сопротивления, как правило, выполняет ступенчатый реостат. В этом случае двигатель будет разгонятся тоже ступенчато. Часто используются устройства, способные поднять КПД двигателя, при этом избавляя щетки от излишнего трения о кольца. После разгона устройство поднимает щетки и замыкает кольца.
Для реализации автоматического пуска электродвигателя используется подключенная индуктивность к обмотке ротора. Дело в том, что в тот момент, когда осуществляется пуск, в роторе показатели индуктивности и частоты тока максимальны. При разгоне двигателя эти показатели падают, а в конечном итоге двигатель выходит на нормальный рабочий режим.
Отличие короткозамкнутого ротора от фазного
В короткозамкнутом роторе электродвигателя, в отличие от фазного варианта, нет обмоток. Их заменяют замкнутые с торцов между собой кольцами стержни, изготовленные из алюминия или меди. Визуально конструкция такого ротора напоминает беличье колесо, от чего он и получил свое название — “беличья клетка”.
Короткозамкнутый ротор приводится во вращение за счет наведения тока магнитным полем статора. Чтобы исключить пульсирование магнитного поля в роторе, стержни “беличьей клетки” располагаются параллельно между собой, но под наклоном относительно оси вращения. АД с короткозамкнутым ротором обладают высокой надежностью за счет отсутствия щеток, которые со временем перетираются. Кроме того, их стоимость меньше, чем у вариантов с фазным ротором.
Преимущества и недостатки электродвигателя с фазным ротором
Широкое распространение АД с фазным ротором получил за счет ряда серьезных преимуществ перед другими машинами подобного рода. Среди них следует отметить большой вращающий момент при запуске, а также относительно постоянную скорость вращения даже при высоких нагрузках. Такие электродвигатели для запуска требуют меньший пусковой ток, а конструкция позволяет использовать автоматические пусковые устройства. Кроме того, эти электрические машины хорошо переносят продолжительные перегрузки.
Как и любой электрический механизм, электродвигатели с фазным ротором имеют ряд недостатков:
- Чувствительность к перепадам напряжения;
- Большие габаритные размеры
- Высокая стоимость;;
- Более сложная конструкция за счет цепи ротора с добавочным сопротивлением;
- Меньшие показатели коэффициента мощности и КПД (относительно АД с короткозамкнутым ротором).
Область применения электродвигателей с фазным ротором
Ад с фазным ротором, за счет высокого крутящего момента, низких пусковых токов и способности долговременно работать при повышенных нагрузках, используются там, где необходима большая мощность электродвигателя, но нет необходимости плавно регулировать скорость вращения в широких диапазонах. Кроме того, эти машины отлично приспособлены под пуск с нагрузкой на валу.
За счет высокой производительности, наиболее часто АД с фазным ротором используются на различном серьезном, тяжелом силовом оборудовании, например, подъемных кранах, лифтовых приводах, станках, различных подъемниках. Иными словами, эти двигатели используются там, где есть необходимость запуска под нагрузкой, а не на холостом ходу.
Проверка электродвигателя с фазным ротором
Для проверки обмоток статора трехфазного АД на целостность, необходимо добраться до клемм их подключения. Затем нужно произвести замеры сопротивлений между фазными клеммами по отдельности, предварительно сняв перемычки. Если сопротивление какой-либо обмотки меньше, чем у других, это свидетельствует о замыкании между ее витками. В этом случае двигатель отдается на перемотку.
Для проверки обмоток ротора, необходимо отыскать выводы от контактных колец. Затем нужно убедиться, что сопротивления обмоток совпадают. Если конструкция электродвигателя предусматривает наличие системы отключения обмоток ротора, отсутствие контакта может быть обусловлено именно поломкой данного механизма, а не обрывом витков.
О наличие какой-либо неисправности АД могут свидетельствовать следующие факторы:
- Снижение скорости вращения при нагрузке. Характерно для высокого сопротивления в цепи ротора, слабого контакта в его обмотке, низкого напряжения электросети
- Разворачивание АД, когда цепь ротора разомкнута – КЗ в обмотке ротора
- Чрезмерное равномерное повышение температуры двигателя – длительная перегрузка АД или его недостаточное охлаждение
- Нагрев статорной обмотки местного характера – двойное замыкание катушек статора на корпус или между фазами, КЗ между витками, неверное подключение катушек в фазе между собой
- Нагрев стали статора местного характера – нарушение изоляции между листами стали, их оплавление и выгорание, замыкание
- Посторонний шум при работе АД. Может быть вызван как выходом из строя подшипников, так и недостаточной запрессовкой активной стали. Определяется на слух по характеру постороннего шума
- Перегорание в обмотке якоря предохранителей, отсутствие контакта в подводящей проводке, выход из строя реостата
Для самостоятельной диагностики и исправления неисправностей электродвигателя необходимыми являются хотя-бы минимальные познания в устройстве АД и электрических цепях в целом. Все же крайне не рекомендуется самостоятельно заниматься ремонтом электродвигателя с фазным ротором, так как это может привести к поражению электрическим током.
 Асинхронный двигатель представляет собой мотор переменного тока, скорость вращения которого не равна частоте напряжения в обмотках статора. Эти электродвигатели получили широкое распространение, потому что являются достаточно выносливыми. Асинхронный однофазный, трехфазный моторы могут работать при значительной нагрузке продолжительное время, не перегреваясь, держать свой крутящий момент. Работа асинхронного двигателя проста, но при этом его характеристики напрямую зависят от параметров обмоток и технологии их укладки.
Асинхронный двигатель представляет собой мотор переменного тока, скорость вращения которого не равна частоте напряжения в обмотках статора. Эти электродвигатели получили широкое распространение, потому что являются достаточно выносливыми. Асинхронный однофазный, трехфазный моторы могут работать при значительной нагрузке продолжительное время, не перегреваясь, держать свой крутящий момент. Работа асинхронного двигателя проста, но при этом его характеристики напрямую зависят от параметров обмоток и технологии их укладки.
Область применения
Асинхронный двигатель получил широкое распространение в качестве тягового, второстепенного и прочих видов силовых компонентов. Учитывая особенности его конструкции, отсутствие скользящих контактов, эксплуатация такого мотора намного проще. Также, схема подключения не требует сложных устройств управления, если говорить о простом режиме работы с постоянной частотой. Плюс ко всему и срок службы до сервисного обслуживания намного дольше, так как внутреннее пространство и обмотки не загрязняются графитом.
Применяется асинхронный электродвигатель во многих сферах:
 Системы вентиляции – благодаря выносливости и неприхотливости при эксплуатации моторы с короткозамкнутыми роторами достаточно часто используются в качестве вентиляторов. Они хорошо переживают продолжительную работу на максимальных оборотах, обеспечивая пользователей или технологическое оборудование интенсивным воздушным потоком.
Системы вентиляции – благодаря выносливости и неприхотливости при эксплуатации моторы с короткозамкнутыми роторами достаточно часто используются в качестве вентиляторов. Они хорошо переживают продолжительную работу на максимальных оборотах, обеспечивая пользователей или технологическое оборудование интенсивным воздушным потоком.- Конвейеры – благодаря высокому моменту, способности его поддерживать при нагрузках моторы асинхронного типа стали идеальным вариантом для реализации управления подвижными производственными линиями.
- Следящие системы и приводные устройства – особо часто применяют асинхронные двигатели в приводных системах на технологическом оборудовании. Но для организации управления таким типом двигателя потребуется особая схема подключения и частотный блок управления, а ротор асинхронного двигателя оснащается неодимовыми магнитами. Такие моторы рассчитаны на работы с частотой до 400 Гц.
- Бытовая сфера. Из такого мотора можно сделать различные рабочие агрегаты бытового назначения или для небольшой мастерской: вентилятор, управляемые заслонки, циркулярная пила, фуганок, прочее оборудование.
 Системы вентиляции – благодаря выносливости и неприхотливости при эксплуатации моторы с короткозамкнутыми роторами достаточно часто используются в качестве вентиляторов. Они хорошо переживают продолжительную работу на максимальных оборотах, обеспечивая пользователей или технологическое оборудование интенсивным воздушным потоком.
Системы вентиляции – благодаря выносливости и неприхотливости при эксплуатации моторы с короткозамкнутыми роторами достаточно часто используются в качестве вентиляторов. Они хорошо переживают продолжительную работу на максимальных оборотах, обеспечивая пользователей или технологическое оборудование интенсивным воздушным потоком.Разновидности моторов
От типа питающей сети асинхронные электродвигатели подразделяются на:
- Трехфазные. Обмотки асинхронных двигателей такого типа состоят из 3 катушек, специальным образом уложенных в пазах статора. Они предназначены для работы в промышленности, так как имеют высокий КПД и cosφ приближенный к 1, а для обеспечения дополнительной экономии работают с системой рекуперации энергии при торможении, выступая генератором.
- Однофазный асинхронный двигатель. Применяется в быту и промышленности: старые стиральные машины, бытовые вентиляторы, холодильное и прочие виды оборудования. Имеют меньший КПД, мощность, по сравнению с трехфазными, что объясняется потерями в статоре из-за отсутствия дополнительной фазы.
 Трехфазные. Обмотки асинхронных двигателей такого типа состоят из 3 катушек, специальным образом уложенных в пазах статора. Они предназначены для работы в промышленности, так как имеют высокий КПД и cosφ приближенный к 1, а для обеспечения дополнительной экономии работают с системой рекуперации энергии при торможении, выступая генератором.
Трехфазные. Обмотки асинхронных двигателей такого типа состоят из 3 катушек, специальным образом уложенных в пазах статора. Они предназначены для работы в промышленности, так как имеют высокий КПД и cosφ приближенный к 1, а для обеспечения дополнительной экономии работают с системой рекуперации энергии при торможении, выступая генератором.Устройство асинхронного двигателя
Устройство асинхронного двигателя является достаточно простым:
- Статор – является неподвижной частью электрического двигателя, который снабжен обмотками возбуждения.
- Ротор – вращающийся элемент мотора, который крутится под действием магнитного поля, создаваемым обмотками возбуждения, расположенными на статоре. Различают 2 типа двигателя от конструкции ротора: короткозамкнутые и фазные.
- Фланцы – статическая часть электрического двигателя, в которой находятся опорные подшипники, удерживающие ротор и являющиеся своего рода крепежом для статора. Он зажимается между двумя фланцами-крышками стяжными болтами. Либо они прикручены к корпусу статора.
- Клеммная коробка – часть статической конструкции двигателя, в которую выводятся концы обмоток со статора. Посредством его осуществляется подключение двигателя к схеме управления.
- Крыльчатка и защитный кожух – используется для обеспечения принудительной вентиляции, а кожух предохранит обслуживающий персонал от травматизма.
- Дополнительные сервисные обмотки – при необходимости совместно с обмоткой возбуждения на статоре может быть дополнительная, предназначенная для контроля и измерения рабочих параметров мотора во время его работы.
- Термодатчики – промышленные асинхронные двигателя, кроме обмоток, также имеются датчики температуры, контролирующие перегрев на случай резкого возрастания тока потребления.
Также двигателя могут быть оборудованными планарными редукторами и изготовленными в едином корпусе. Это преимущественно промышленные типы агрегатов, применяемые на станках, конвейерах и прочих видах оборудования.
Особенности устройства каждого из элементов
 Статор асинхронного электродвигателя представляет собой цилиндр, изготовленный из листов специальной электротехнической стали толщиной до 0.5 мм, покрытых лаком. Этот цилиндр является сердечником, с внутренней стороны имеются пазы, куда укладываются обмотки. В трехфазных, соответственно, сдвинутые на 120 градусов, в однофазных – на 90. Обмотки могут быть уложены несколькими способами в зависимости от схемы их подключения и эксплуатационных требований. Именно от этого зависит такой показатель, как момент и мощность на валу. А при наличии количества полюсов более, чем 2 пары, то он может использоваться в следящих системах управления приводными механизмами.
Статор асинхронного электродвигателя представляет собой цилиндр, изготовленный из листов специальной электротехнической стали толщиной до 0.5 мм, покрытых лаком. Этот цилиндр является сердечником, с внутренней стороны имеются пазы, куда укладываются обмотки. В трехфазных, соответственно, сдвинутые на 120 градусов, в однофазных – на 90. Обмотки могут быть уложены несколькими способами в зависимости от схемы их подключения и эксплуатационных требований. Именно от этого зависит такой показатель, как момент и мощность на валу. А при наличии количества полюсов более, чем 2 пары, то он может использоваться в следящих системах управления приводными механизмами.
Статор запрессован в корпус либо же расположен между фланцами. Корпус и боковые крышки изготовлены из чугуна или сплава алюминия. На них имеются ребра для увеличения площади и повышения эффективности отведения тепла при работе. Такое устройство позволяет лучше охлаждать двигатель, обеспечивая продолжительную работу при предельных нагрузках.
Однополюсная обмотка такого электродвигателя наматывается из 3-х катушек. Каждая из них называется фазой. Для достижения требуемых параметров работы мотора обмотка укладывается в противоположных пазах сердечника. Катушки соединяются между собой специальным образом в соответствии со схемой подключения и ожидаемых характеристик, обеспечивая возбуждение магнитного поля и необходимый момент при вращении.
Все концы датчиков выводятся в клеммную коробку, что позволяет их соединять в звезду или треугольник, что зависит от схемы подключения системы управления, величины питания. 3-фазный электродвигатель является универсальным, при необходимости его можно подключать к однофазному питанию с линейным напряжением. При соединении обмоток треугольником напряжение обмоток равно линейному Uф, а при подключении по схеме звезды – √3Uф.
Ротор
 Ротор в асинхронном электродвигателе представляет собой вал, на котором закрепляется сердечник, набранный из листов электротехнической стали. Что трехфазный, что однофазный мотор, ротор имеет практически одинаковую конструкцию. В качестве обмотки в обычных асинхронных моторах на рабочую частоту 50Гц используются куски медного или алюминиевого провода большой толщины или стержни, соединенные между собой торцевыми замыкающими кольцами.
Ротор в асинхронном электродвигателе представляет собой вал, на котором закрепляется сердечник, набранный из листов электротехнической стали. Что трехфазный, что однофазный мотор, ротор имеет практически одинаковую конструкцию. В качестве обмотки в обычных асинхронных моторах на рабочую частоту 50Гц используются куски медного или алюминиевого провода большой толщины или стержни, соединенные между собой торцевыми замыкающими кольцами.
Для того чтобы обмотка надежно удерживалась в сердечнике, имеются специальные пазы, куда она запрессована. Торцевые кольца могут быть снабжены вентиляционными лопатками, предназначенными для улучшения интенсивности охлаждения внутреннего пространства. Вал закреплен на подшипниках, впрессованных во фланцы или плитах, закрепленных к станине в зависимости от устройства.
Между валом и статором имеется зазор, величина которого зависит от пусковых параметров мотора. Если необходимо увеличить мощность и момент, то он должен быть как можно меньше. Одновременно с ростом мощности увеличиваются и добавочные потери в верхних слоях статора и ротора.
Принцип работы
Асинхронный двигатель принцип работы имеет достаточно простой. Он основан на двух физических явлениях:
- При подаче напряжения на статорные обмотки в двигателе возникает вращающееся магнитное поле.
- Поле оказывает воздействие на ток, индуцируемый в роторе. А это создает крутящий момент, поворачивающий вал двигателя относительно полюсов.
За каждый поворот вала полюса меняются полярностью с частотой сети. Поэтому напряжение обмотки статора имеет стандартную частоту, а скорость вращения зависит от:
- нагрузки на валу;
- количества пар полюсов;
- особенностей намотки статора.
Маркировка электродвигателя
Для упрощения процесса подключения и выбора схемы асинхронного 3-фазного ЭД на каждом из них имеется соответствующая маркировка. В ней указываются такие характеристики, как:
- крутящий момент;
- мощность;
- максимальная скорость вращения;
- cosφ.
Также в зашифрованной маркировке имеется указание типа двигателя, количества полюсов. Их необходимо учитывать при выборе мотора для тех или для других нужд. А для облегчения процесса подключения все концы сводятся в клеммную коробку, где подписаны следующим образом:
Если мотор подключается к сети 380 В с линейным напряжением обмоток 220В, то его схема обмоток должна быть треугольником. Но если двигатель подключается к стандартной сети 380В, то схема включения обмоток должна быть звездой.
Скольжение
 При рассмотрении принципа работы асинхронного электрического двигателя применяют такое понятие, как скольжение, и обозначается параметр буквой «s». Оно возникает из-за разницы в скоростях вращения магнитного поля статора и реальной частоты вращения ротора. При этом первый показатель на порядок больше. Следовательно, чем выше разница, тем сильнее скольжение.
При рассмотрении принципа работы асинхронного электрического двигателя применяют такое понятие, как скольжение, и обозначается параметр буквой «s». Оно возникает из-за разницы в скоростях вращения магнитного поля статора и реальной частоты вращения ротора. При этом первый показатель на порядок больше. Следовательно, чем выше разница, тем сильнее скольжение.
Скольжение позволяет объяснить принцип работы. За счет отставания частоты вращения ротора от магнитного поля статора и обеспечивается наведение ЭДС в короткозамкнутом роторе. Но если бы поле вращалось со скоростью частоты ЭДС в роторе, то собственно вращения не происходило.
Скольжение, являясь относительной величиной, измеряется в %. И становится больше при увеличении нагрузки на валу двигателя.
Двигателя с фазным ротором
Когда речь идет о моторах с фазным ротором, то он имеет немного иное устройство. Также имеется 3 обмотки, которые соединены в звезду, а их начала выведены на подводящие кольца. Сравнивая два типа двигателя с короткозамкнутым и фазным роторами, то у второго развивается момент сразу же под высокой нагрузкой. Такие моторы получили применение в системах, где требуется сделать мощный приводной агрегат с высокой тягой. Также такие моторы являются более удобными для регулируемого управления посредством регулятора частоты.
Недостатки асинхронных электродвигателей
В стандартном исполнении без магнитов на роторе асинхронные электродвигатели являются маломощными. Они неспособны сразу обеспечить высокий крутящий момент. А также для их запуска требуется большое количество электрической мощности, которая может превышать предельно допустимые показатели системы питания. Поэтому их пуск должен выполняться без нагрузки. Кроме этого, асинхронные электродвигатели являются мощными источниками электромагнитных помех, сопровождающимися сбоями в работе различных других устройств, находящихся вблизи. Для снижения их влияния необходимо предусматривать качественное заземление и обязательное экранирование.
morflot.su
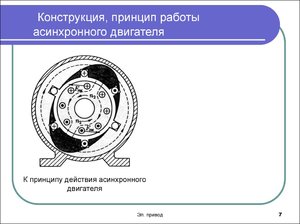
Принцип работы асинхронного двигателя | Заметки электрика
Здравствуйте, уважаемые посетители сайта http://zametkielectrika.ru.
Электрические машины переменного тока нашли широкое распространение, как в сфере промышленности (шаровые мельницы, дробилки, вентиляторы, компрессоры), так и в домашних условиях (сверлильный и наждачный станки, циркулярная пила).
Основная их часть является бесколлекторными машинами, которые в свою очередь разделяются на асинхронные и синхронные.
Асинхронные и синхронные электрические машины обладают одним замечательным свойством под названием обратимость, т.е. они могут работать как в двигательном режиме, так и в генераторном.
Но чтобы дальше перейти к более подробному их рассмотрению и изучению, необходимо знать принцип их работы. Поэтому в сегодняшней статье я расскажу Вам про принцип работы асинхронного двигателя. После прочтения данного материала Вы узнаете про электромагнитные процессы, протекающие в электродвигателях.
Итак, поехали.
Принцип работы трехфазного асинхронного двигателя
С устройством асинхронного двигателя мы уже знакомились, поэтому повторяться второй раз не будем. Кому интересно, то переходите по ссылочке и читайте.
При подключении асинхронного двигателя в сеть необходимо его обмотки соединить звездой или треугольником. Если вдруг на выводах в клеммнике отсутствует маркировка, то необходимо самостоятельно определить начала и концы обмоток электродвигателя.
При включении обмоток статора асинхронного двигателя в сеть трехфазного переменного напряжения образуется вращающееся магнитное поле статора, которое имеет частоту вращения n1. Частота его вращения определяется по следующей формуле:
- f — частота питающей сети, Гц
- р — число пар полюсов
Это вращающееся магнитное поле статора пронизывает, как обмотку статора, так и обмотку ротора, и индуцирует (наводит) в них ЭДС (Е1 и Е2). В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
Как Вы уже знаете, обмотка ротора замкнута накоротко, у электродвигателей с короткозамкнутым ротором, или через сопротивление, у электродвигателей с фазным ротором, поэтому под действием ЭДС ротора (Е2) в ней появляется ток. Так вот взаимодействие индуцируемого тока в обмотке ротора с вращающимся магнитным полем статора создает электромагнитную силу Fэм.
Направление электромагнитной силы Fэм можно легко найти по правилу левой руки.
Правило левой руки для определения направления электромагнитной силы
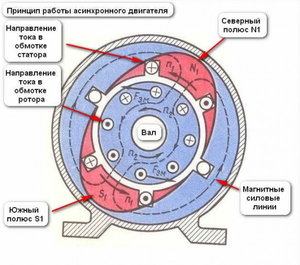
На рисунке ниже показан принцип работы асинхронного двигателя. Полюса вращающегося магнитного поля статора в определенный период обозначены N1 и S1. Эти полюса в нашем случае вращаются против часовой стрелки. И в другой момент времени они будут находится в другом пространственном положении. Т.е. мы как бы зафиксировали (остановили) время и видим следующую картину.
Токи в обмотках статора и ротора изображены в виде крестиков и точек. Поясню. Если стоит крестик, то значит ток в этой обмотке направлен от нас. И наоборот, если точка, то ток в этой обмотке направлен к нам. Пунктирными линиями показаны силовые магнитные линии вращающегося магнитного поля статора.
Устанавливаем ладонь руки так, чтобы силовые магнитные линии входили в нашу ладонь. Вытянутые 4 пальца нужно направить вдоль направления тока в обмотке. Отведенный большой палец покажет нам направление электромагнитной силы Fэм для конкретного проводника с током.
На рисунке показаны только две силы Fэм, которые создаются от проводников ротора с током, направленным от нас (крестик) и к нам (точка). И как мы видим, электромагнитные силы Fэм пытаются повернуть ротор в сторону вращения вращающегося магнитного поля статора.
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен от нас (крестик).
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен к нам (точка).
Совокупность этих электромагнитных сил от каждого проводника с током создает общий электромагнитный момент М, который приводит во вращение вал электродвигателя с частотой n.
Эта частота называется, асинхронной.
Отсюда и произошло название асинхронный двигатель. Частота вращения ротора n всегда меньше частоты вращающегося магнитного поля статора n1, т.е. отстает от нее. Для определения величины отставания введен термин «скольжение», который определяется по следующей формуле:
Выразим из этой формулы частоту вращения ротора:
Пример расчета частоты вращения двигателя
Например, у меня есть двигатель типа АИР71А4У2 мощностью 0,55 (кВт):
- число пар полюсов у него равно 4 (2р=4, р=2)
- частота вращения ротора составляет 1360 (об/мин)
Вот его бирка.
Определим частоту вращения поля статора этого двигателя при частоте питающей сети 50 (Гц):
Найдем величину скольжения для этого двигателя:
Кстати, направление движения вращающегося магнитного поля статора, а следовательно, и направление вращения вала электродвигателя, можно изменить. Для этого необходимо поменять местами любые два вывода источника питающего трехфазного напряжения. Об этом я упоминал Вам в статьях про реверс электродвигателя и чередование фаз.
Принцип работы асинхронного двигателя. Выводы
Зная принцип работы асинхронного двигателя, можно сделать вывод, что электрическая энергия преобразуется в механическую энергию вращения вала электродвигателя.
Частота вращения магнитного поля статора, а следовательно и ротора, напрямую зависит от числа пар полюсов и частоты питающей сети. Если число пар полюсов ограничивается типом двигателя (р = 1, 2, 3 и 4), то частоту питающей сети можно изменить в большем диапазоне, например, с помощью частотного преобразователя.
Если в нашем примере частоту питающей сети увеличить всего на 10 (Гц), то частота вращения магнитного поля статора увеличится на 300 (об/мин).
Опыт по установке и монтажу частотных преобразователей у меня есть, но не большой. Несколько лет назад на городском водоканале мы проводили замену двух высоковольтных двигателей насосов холодной воды на низковольтные двигатели с частотными преобразователями. Но это уже отдельная тема для разговора. Сейчас покажу Вам несколько фотографий.
Вот фотография старого высоковольтного двигателя напряжением 6 (кВ).
А это новые двигатели напряжением 400 (В), установленные вместо старых высоковольтных.
Вот шкафы частотных преобразователей. На каждый двигатель свой шкаф. К сожалению, изнутри сфотографировать не успел.
Подписывайтесь на рассылку новостей с моего сайта, чтобы не пропустить самое интересное. В ближайшее время я расскажу Вам про пуск и способы регулирования частоты вращения трехфазных асинхронных двигателей двигателей, схемы их подключения и многое другое.
P.S. На этом статью про принцип работы асинхронного двигателя я завершаю. Спасибо за внимание.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
Векторное управление для асинхронного электродвигателя «на пальцах»
В предыдущей статье «Векторное управление электродвигателем «на пальцах» рассматривалась векторная система управления для синхронных электродвигателей. Статья получилась большой, поэтому вопрос про асинхронные электродвигатели (induction motors) был вынесен в отдельную публикацию. Данная статья является продолжением предыдущей и опирается на приведенные там объяснения принципов работы электродвигателей. Она расскажет об особенностях работы асинхронного двигателя применительно к векторному управлению, а также покажет отличия в структуре векторной системы управления между синхронной и асинхронной машиной.
Как работает асинхронный электродвигатель? Наиболее популярное объяснение говорит что-то типа «статор создает вращающееся магнитное поле, которое наводит ЭДС в роторе, из-за чего там начинают течь токи, в результате ротор увлекается полем статора и начинает вращаться». Лично я от такого объяснения всю физику процесса понимать не начинаю, поэтому давайте объясню по-другому, «на пальцах».
Все же видели видео, как магнит взаимодействует с медным цилиндром? Особенно обратите внимание на диапазон времени с 0:49 до 1:03 – это уже самый настоящий асинхронный двигатель:
Эффект происходит из-за появления в цилиндре вихревых токов. Согласно закону электромагнитной индукции, открытого Майклом Фарадеем, при изменении магнитного потока замкнутого контура в нем возникает ЭДС (по-простому считайте, что напряжение). Эта ЭДС, применительно к медному цилиндру, тут же вызывает появление в цилиндре тока. При этом этот ток тоже создает свой, ответный магнитный поток, направленный ровно в противоположную сторону от изменения потока магнита, который мы подносим:
Индукционный ток, возникающий в замкнутом проводящем контуре, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток.
Это можно понимать так, что замкнутый контур сопротивляется изменению магнитного потока внутри себя. Если вы резко поднесёте магнит к медному цилиндру, т.е. сделаете резкое изменение магнитного потока, то в цилиндре потекут такие ответные токи, что магнитное поле внутри цилиндра в первый момент времени будет равно нулю: магнитное поле поднесенного магнита будет полностью скомпенсировано магнитным полем токов цилиндра (с допущениями, конечно). Если магнит поднести и держать, то токи в цилиндре из-за наличия активного сопротивления меди постепенно спадут, а поле цилиндра, создаваемое его токами, пропадет: магнитный поток постоянного магнита «прорвется» внутрь цилиндра, как будто никакого цилиндра и нет. Но стоит попытаться убрать магнит, как цилиндр отреагирует снова – теперь он будет пытаться сам «воссоздать» внутри себя пропадающий магнитный поток, т.е. будет опять сопротивляться изменению магнитного потока, в данном случае его исчезновению. Но что значит «воссоздать магнитный поток»? Это значит, что на какое-то время медный цилиндр можно считать условно «постоянным магнитом» – в нем циркулирует вихревой ток, создающий магнитное поле (на этом же принципе «висят» сверхпроводники в магнитном поле, но это совсем другая история).
Давайте теперь обратимся к конструкции асинхронного двигателя. Ротор асинхронного двигателя условно можно представлять себе также в виде медного цилиндра. Но в реальных конструкциях это некая решётка в виде «беличьей клетки» (рисунок 1) из меди или алюминия, совмещенная с магнитопроводом (шихтованное железо).
Рисунок 1. Ротор асинхронного двигателя типа «беличья клетка» с током в одной из «рамок» беличьей клетки, реагирующей на нарастание внешнего магнитного поля.
На рисунке схематично показано протекание тока в одной из «рамок», т.е. в некоторых прутьях беличьей клетки, если сверху поднести магнит (создать ток в статоре). На самом деле ток в этом случае протекает во всех прутьях, кроме, условно, верхнего и нижнего, для которых изменения потока нет (но они бы среагировали на горизонтально поднесенный магнит).
Помните ещё из начала прошлой статьи картинку со схематическим изображением двухфазной синхронной машины, где ротором был магнит? Давайте теперь сделаем из неё асинхронный двигатель: вместо магнита поставим две перпендикулярные короткозамкнутые катушки, символизирующие медный цилиндр ротора (рисунок 2).
Рисунок 2. Схематическое изображение двухфазного асинхронного двигателя с короткозамкнутым ротором.
Замена цилиндра на две катушки для пояснения принципа работы (или моделирования) корректна, точно также как корректна замена трехфазной обмотки на двухфазную. Только в этом случае мы заменяем… «бесконечнофазную обмотку» цилиндра (бесконечное число рамок) на две катушки с эквивалентной индуктивностью и сопротивлением. Ведь двумя катушками можно создать точно такой же вектор тока и магнитного потока, как и цилиндром.
А теперь давайте сделаем на короткое время из асинхронной машины синхронную. Подадим в катушку оси β постоянный ток и подождем секунды две-три, пока в роторе перестанут течь ответные токи: «поднесем внешний магнит». То есть дождемся спадания токов в роторе, чтобы магнитное поле статора «пронзило ротор» и никто ему не мешал. Что теперь будет, если выключить ток в статоре? Правильно, на те же две-три секунды, пока ток ротора этому противится, мы из ротора получим «обычный магнит» (рисунок 3).
Рисунок 3. Асинхронный двигатель, когда только что выключили постоянный ток по фазе β – течет ток в роторе ird.
Что же мы ждем? Быстрее, пока магнит не пропал, рисуем вдоль него привычную ось d (как в синхронной машине) и перпендикулярную ей ось q, привязанные к ротору. Включаем структуру векторного управления синхронной машиной, подаем ток по оси q, создавая момент, поехали!
Так можно даже действительно сделать несколько оборотов, пока наш сахарный магнит не растаял, а ось d не ушла в небытие. Что же делать? Давайте не будем выключать ток по оси d, подпитывая наш магнит! И опять же сохраним структуру векторного управления синхронной машиной, просто подав задание по оси d (раньше там был ноль). Итак, смотрим на рисунок 4: оси d, q по датчику положения «приделаны» к ротору, двигатель стоит, подан ток по оси d в статоре, что в данном случае для стоячей машины совпадает с осью β. Тока по оси q пока нет: ждем, пока ротор «намагнитится». И вот подаем ток isq (s – статор)! Поехали!
Рисунок 4. Подадим ток в ось d, намагнитив машину, подготовив всё для подачи тока в ось q статора.
Далеко ли мы уедем таким методом барона Мюнхгаузена? К сожалению, нет. Смотрите, что произошло (рисунок 5):
Рисунок 5. А магнит-то сполз!
Двигатель начал крутиться, но через некоторое время после того, как мы подали ток в ось q, образовав суммарный ток is и «прибив» этот вектор к положению ротора, магнит в роторе «съехал»! И встал ровно вдоль вектора is. Ротор же не понимает, где мы нарисовали ему оси d, q… Ему все равно, крутился он или нет. Важно, что его внутренний «наведенный магнит» в конечном счете хочет стать сонаправленным с магнитным потоком статора, «подчиниться» внешнему потоку. Из-за съехавшего магнита двигатель перестанет крутиться: мало того, что между магнитом ротора и током iq нет желаемых 90 градусов, так еще и ток оси d теперь его тянет в противоположную сторону, компенсируя момент, создаваемый током iq. Метод барона Мюнхгаузена не удался.
Что же делать с ускользающим магнитом ротора? А давайте сделаем структуру векторного управления асинхронного двигателя не в осях d,q, приделанных к ротору, а в других осях, приделанных именно к текущему положению «магнита ротора» – назовем их оси x,y, чтобы отличать от d,q. По «научному» – это оси, ориентированные по потокосцеплению ротора. Но как же узнать, где конкретно сейчас это потокосцепление ротора, т.е. куда повернут магнит в роторе? Его положение зависит… во-первых, от положения самого ротора (датчик положения у нас есть, хорошо), во-вторых, от токов статора (создающих поток статора, по которому и собирается в конечном счете повернуться магнит ротора), а в-третьих от параметров роторной цепи – индуктивности и сопротивления «медного цилиндра» (он же беличья клетка, он же роторная обмотка, он же цепь ротора). Поэтому… зная всё это, положение «магнита» ротора можно просто вычислять по нескольким дифференциальным уравнениям. Делает это так называемый наблюдатель потокосцепления ротора, выделенный цветом на итоговой структурной схеме векторного управления асинхронным двигателем (рисунок 6).
Рисунок 6. Векторная датчиковая структура управления асинхронным двигателем
В наблюдатель заводятся показания с датчика положения ротора, а также текущие токи статора в осях α, β. На выходе наблюдателя – положение «магнита» ротора, а именно угол наблюдаемого потокосцепления ротора . В остальном структура полностью аналогична таковой для синхронной машины, только оси d,q переименованы в x,y, а на ось x подано задание тока, который будет поддерживать наш «магнит» в роторе. Также на многих обозначениях добавлен индекс “s”, чтобы показать, что данная величина имеет отношение к статору, а не к ротору. Также надо отметить, что в западной литературе не используют оси x,y: у них ось d всегда направлена по полю ротора, что для асинхронного двигателя, что для синхронного. Наши ученые еще в советское время разделили оси d,q и x,y, чтобы исключить путаницу: d,q прикреплены к ротору, а x,y к полю ротора.
Что же получается? Магнит ротора всё время скользит, сползает от текущего положения на роторе в сторону тока оси y. Чем больше этот ток, тем сильнее скольжение. Наблюдатель в реальном времени вычисляет положение этого магнита и «подкручивает» оси x,y всё время вперед по отношению к осям d,q (положению ротора). Ось x всегда соответствует текущему положению потокосцепления в роторе – положению «магнита». Т.е. оси x,y бегут всегда (в двигательном режиме) немного быстрее вращения ротора, компенсируя скольжение в нем. Токи в роторе, если их измерить или промоделировать, получаются синусоидальными. Только изменяются они не с частотой статорных токов, а с частотой этого скольжения, т.е. очень медленно. Если в статоре промышленного асинхронника 50Гц, то при работе под нагрузкой частота тока в роторе – единицы герц. Вот, собственно, и весь секрет векторного управления для асинхронного двигателя.
Чем векторное управление асинхронным двигателем лучше, чем скалярное? Скалярное управление это такое, когда к двигателю прикладывается напряжение заданной частоты и амплитуды – например, 380В 50Гц. И от нагрузки на роторе оно не зависит – никаких регуляторов токов, векторов… Просто задается частота напряжения и его амплитуда – скалярные величины, а токи и потоки в двигателе пусть сами себе удобное место находят, как хотят. В установившемся режиме работы двигателя векторное управление неотличимо от скалярного – векторное точно также будет прикладывать при номинальной нагрузке те же, скажем, 380В, 50Гц. Но в переходных режимах… если нужно быстро запустить двигатель с заданным моментом, если нужно отрабатывать диаграмму движения, если есть импульсная нагрузка, если нужно сделать генераторный режим с определенным уровнем мощности – всё это скалярное управление или не может сделать, или делает это с отвратительными, медленными переходными процессами, которые могут к тому же «выбить защиту» преобразователя частоты по превышению тока или напряжения звена постоянного тока (двигатель колеблется и может запрыгивать в генераторный режим, к которому преобразователь частоты не всегда приспособлен).
В векторной же структуре «всё под контролем». Момент вы задаете сами, поток тоже. Можно ограничить их на нужном уровне, чтобы не превысить уставок защиты. Можно контролируемо форсировать токи, если кратковременно нужно сделать в несколько раз больший момент. Можно регулировать не только момент двигателя, но и поток (ток оси x): если нагрузка на двигателе мала, то нет никакого смысла держать полный поток в роторе (делать магнит «номинального режима») – можно ослабить его, уменьшив потери. Можно стабилизировать скорость регулятором скорости с высокой точностью и быстродействием. Можно использовать асинхронный привод в качестве тягового (в транспорте), задавая требуемый момент тяги. В общем, для сложных применений с динамичной работой двигателя векторное управление асинхронным двигателем незаменимо.
Также есть отличительные особенности векторного управления асинхронного двигателя от синхронного. Первая – это датчик положения. Если для синхронного привода нам нужно знать абсолютное положение ротора, чтобы понять, где магнит, то в асинхронном приводе этого не требуется. Ротор не имеет какой-то выраженной полюсной структуры, «магнит» в нем постоянно скользит, а если посмотреть в формулы наблюдателя потокосцепления ротора, то там не требуется знания положения: в формулы входит только частота вращения ротора (на самом деле есть разные формулы, но в общем случае так). Поэтому на датчике можно сэкономить: достаточно обычного инкрементального энкодера для отслеживания частоты вращения (или даже тахогенератора), абсолютные датчики положения не требуются. Вторая особенность – управление потоком в асинхронном электродвигателе. В синхронной машине с постоянными магнитами поток не регулируется, что ограничивает максимальную частоту вращения двигателя: перестает хватать напряжения на инверторе. В асинхронном двигателе, когда это случается… просто уменьшаете задание по оси x и едете дальше! Максимальная частота не ограничена! Да, от этого будет снижаться момент двигателя, но, главное, ехать «вверх» можно, в отличие от синхронной машины (по-правде там тоже можно, но недалеко, не для всех двигателей и с кучей проблем).
Точно также существуют бездатчиковые алгоритмы векторного управления асинхронным двигателем, которые оценивают угол потокосцепления ротора не используя сигнал датчика положения (или скорости) вала ротора. Точно также, как и для синхронных машин, в работе таких систем есть проблемы на низкой частоте вращения ротора, где ЭДС двигателя мала.
Также следует сказать пару слов о роторе. Если для промышленных асинхронных двигателей его удешевляют, используя алюминиевую беличью клетку, то в тяге, где массогабаритные показатели важнее, наоборот, могут использовать медный цилиндр. Так, во всеми любимом электромобиле Tesla стоит именно асинхронный электродвигатель с медным ротором (рисунок 7)
Рисунок 7. Ротор асинхронного электродвигателя Tesla Model S в стальной обшивке (фото из разных источников за разные годы)
Вот, собственно, и всё, что я хотел сказать про асинхронный двигатель. В данной обзорной статье не рассмотрены многие тонкости, такие как регулятор потока ротора, возможное построение векторной структуры в других осях координат, математика наблюдателя потокосцепления ротора и многое другое. Как и в конце прошлой статьи, за дальнейшими подробностями отсылаю читателя к современным книгам по приводу, например к «Анучин А. С. Системы управления электроприводов. МЭИ, 2015».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в статье «Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье «Способы отладки ПО микроконтроллеров в электроприводе». Также наша фирма ООО «НПФ Вектор» предлагает разработку на заказ систем управления электродвигателями и другим электрооборудованием, примеры выполненных проектов можно посмотреть на нашем сайте.
P.S.
У специалистов прошу прощения за не совсем корректное обращение с некоторыми терминами, в частности с терминами «поток», «потокосцепление», «магнитное поле» и другими – простота требует жертв…
habr.com
Синхронный электродвигатель с обмоткой возбуждения
Дмитрий Левкин
Синхронный электродвигатель с обмоткой возбуждения, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть. Статор обычно имеет стандартную трехфазную обмотку, а ротор выполнен с обмоткой возбуждения. Обмотка возбуждения соединена с контактными кольцами к которым через щетки подходит питание.

Синхронный электродвигатель с обмоткой возбуждения (щетки не показаны)
Постоянная скорость вращения синхронного электродвигателя достигается за счет взаимодействия между постоянным и вращающимся магнитным полем. Ротор синхронного электродвигателя создает постоянное магнитное поле, а статор – вращающееся магнитное поле.
Работа синхронного электродвигателя основана на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора
Статор: вращающееся магнитное поле
На обмотки катушек статора подается трехфазное переменное напряжение. В результате создается вращающееся магнитное поле, которое вращается со скоростью пропорциональной частоте питающего напряжения. Подробнее о том, как посредством трехфазного напряжения питания образуется вращающееся магнитное поле можно прочитать в статье «Трехфазный асинхронный электродвигатель».

Взаимодействие между вращающимся (у статора) и постоянным (у ротора) магнитными полями
Ротор: постоянное магнитное поле
Обмотка ротора возбуждается источником постоянного тока через контактные кольца. Магнитное поле создаваемое вокруг ротора возбуждаемое постоянным током показано ниже. Очевидно, что ротор ведет себя как постоянный магнит, так как имеет такое же магнитное поле (в качестве альтернативы можно представить, что ротор сделан из постоянных магнитов). Рассмотрим взаимодействие ротора и вращающегося магнитного поля. Предположим вы придали ротору начальное вращение в том же направлении как у вращающегося магнитного поля. Противоположные полюса вращающегося магнитного поля и ротора будут притягиваться друг к другу и они будут сцепляться с помощью магнитных сил. Это значит, что ротор будет вращаться с той же скоростью, что и вращающееся магнитное поле, то есть ротор будет вращаться с синхронной скоростью.

Магнитные поля ротора и статора сцепленные друг с другом
Скорость с которой вращается магнитное поле может быть вычислена по следующему уравнению:
 ,
,
- где Ns – частота вращения магнитного поля, об/мин,
- f – частота тока статора, Гц,
- p – количество пар полюсов.
Это значит, что скорость синхронного электродвигателя может очень точно контролироваться изменением частоты питающего тока. Таким образом эти электродвигатели подходят для высокоточных приложений.
Почему синхронные электродвигатели не запускаются от электрической сети?
Если ротор не имеет начального вращения, ситуация отличается от описанной выше. Северный полюс магнитного поля ротора будет притягиваться к южному полюсу вращающегося магнитного поля, и начнет двигаться в том же направлении. Но так как ротор имеет определенный момент инерции, его стартовая скорость будет очень низкой. За это время южный полюс вращающегося магнитного поля будет замещен северным полюсом. Таким образом появятся отталкивающие силы. В результате чего ротор начнет вращаться в обратную сторону. Таким образом ротор не сможет запуститься.
Демпферная обмотка — прямой запуск синхронного двигателя от электрической сети
Чтобы реализовать самозапуск синхронного электродвигателя без системы управления между наконечниками ротора размещается «беличья клетка», которая также называется демпферной обмоткой. При запуске электродвигателя катушки ротора не возбуждаются. Под действием вращающегося магнитного поля, индуцируется ток в витках «беличьей клетки» и ротор начинает вращаться подобно тому, как запускаются асинхронные двигатели.
Когда ротор достигает своей максимальной скорости, подается питание на обмотку возбуждения ротора. В результате, как говорилось ранее, полюса ротора сцепляются с полюсами вращающегося магнитного поля и ротор начинает вращаться с синхронной скоростью. При вращении ротора с синхронной скоростью, относительное движение между белечьей клеткой и вращающимся магнитным полем равно нулю. Это значит, что отсутствует ток в короткозамкнутых витках, а следовательно «беличья клетка» не оказывает воздействия на синхронную работу электродвигателя.
Синхронные электродвигатели имеют постоянную скорость независящую от нагрузки (при условии что нагрузка не превышает макимально допустимую). Если момент нагрузки больше, чем момент создаваемый самим электродвигателем, то он выйдет из синхронизма и остановиться. Низкое напряжение питания и низкое напряжение возбуждения также могут быть причинами выхода двигателя из синхронизма.
Синхронные электродвигатели могут также использоваться для улучшения коэффициента мощности системы. Когда единственной целью использования синхронных электродвигателей является улучшение коэффициента мощности их называют синхронными компенсаторами. В таком случае вал электродвигателя не соединяется с механической нагрузкой и вращается свободно.
engineering-solutions.ru