
Коллекторный и бесколлекторный двигатели — Green-Battery
В ассортименте продукции Greenworks есть инструменты с коллекторным (щёточным) и бесколлекторным (бесщёточным) двигателями. Но везде делается акцент только на бесколлекторном электродвигателе. Почему только на нём, и для чего тогда устройства с щёточным? Расскажем в данной статье преимущества и недостатки каждого электродвигателя и ответим на эти два вопроса.
Коллекторный двигатель
Начнём с того, что двигатель — это устройство, которое преобразует какой-либо вид энергии в механический и наоборот. Эффективность данного процесса зависит от внутренней конструкции двигателя, которая в свою очередь зависит от источника тока (постоянного или переменного).
Устройство коллекторного двигателя
Якорь. Стержнем всей конструкции является якорь, он же металлический вал. Вал является движущимся элементом, от которого зависит крутящий момент. На нём также располагается ротор.
Ротор. Связан с ведущим валом. Его внешняя конструкция напоминает барабан, который вращается внутри статора. Задача ротора получать или отдавать напряжение рабочему телу.
Подшипники. Они расположены на противоположных концах якоря для его сбалансированного вращения.
Щётки. Выполнены обычно из графита. Их задача предавать напряжение через коллектор в обмотки.
Коллектор (коммутатор). Он выполнен в виде соединенных между собой медных контактов. Во время процесса вращения он принимает на себя энергию с щёток и направляет её в обмотки.
Обмотки. Расположены на роторе и статоре разных полярностей. Их функция в генерировании собственного магнитного поля под воздействием разных полярностей, за счёт чего якорь приходит в действие.
Сердечник статора. Выполнен из металлических пластин. Может иметь катушку возбуждения с полярным напряжением обмотки ротора.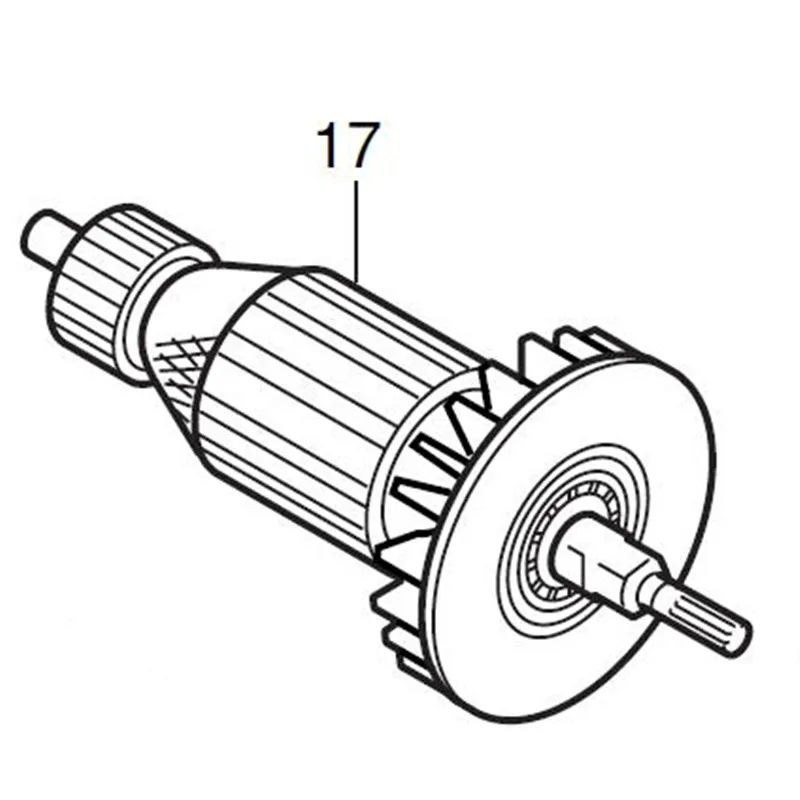 Или — постоянные магниты. Данная конструкция зависит от источника напряжения. Является статичным элементом всего механизма.
Или — постоянные магниты. Данная конструкция зависит от источника напряжения. Является статичным элементом всего механизма.
Плюсы:
- Стоимость меньше, чем у бесколлекторных двигателей (БД).
- Конструкция относительно проще конструкции БД.
- В виду этого, техническое обслуживание проще.
Минусы:
На высоких оборотах увеличивается трение щёток. Отсюда вытекает:
- Быстрый износ щёток.
- Снижение мощности инструмента.
- Появление искр.
- Задымление инструмента.
- Выход из строя инструмента раньше его «жизненного цикла».
Вывод: Если рассматривать бытовую сферу применения, то коллекторный двигатель является традиционным и бюджетным вариантом эксплуатации (и самым часто используемым). Инструменты на данном типе двигателя преданно и верно справятся с любой повседневной задачей в пределах своих возможностей.
Бесколлекторный двигатель
Если в коллекторном двигателе всё приходит в действие за счёт механики, то в бесщёточном — чистая электроника. Также позиции некоторых элементов в конструкции меняются местами. В коллекторном двигателе обмотки находились на роторе, а постоянные магниты — на статоре. У бесколлеторного — постоянные магниты переносятся на ротор, а катушки с обмоткой располагаются на статоре. Также ротор и статор могут менять свои позиции: есть модели двигателей с внешним ротором. Здесь отсутствуют щётки и коллектор, вместо них добавлен микропроцессор (контроллер) и кулер для охлаждения системы. Микропроцессор контролирует положение ротора, скорость вращения, равномерное распределение напряжения по катушкам обмотки.
Микропроцессор контролирует положение ротора, скорость вращения, равномерное распределение напряжения по катушкам обмотки.
Основные типы бесщёточного двигателя :
- Асинхронный — это двигатель, который преобразовывает электроэнергию переменного тока в механическую. Название происходит от разной скорости вращения магнитного поля и ротора. Частота вращения ротора меньше, чем у магнитного поля, создаваемого обмотками статора (Например, двигатель DigiPro, который используется в продукции Greenworks).
- Синхронный — это двигатель переменного тока, у которого частота вращений ротора равна частоте вращений магнитного поля.
Тип двигателя с внешним ротором
Расположение ротора и статора в бесщёточном двигателе DigiPro
Плюсы:
- Из-за отсутствия щёток меньше трения.
-
Меньше подвержены износу.

- Отсутствие искр и возможного возгорания.
- Упрощенная регулировка крутящего момента в больших пределах.
- Экономия расходуемой энергии.
- У инструментов с реверсом одинаковая мощность в обоих направлениях вращения.
- Быстрый запуск с больших скоростей.
- Могут разгоняться до предельных показателей.
- Некоторые модели при сильной нагрузке оснащены системой защиты двигателя.

Минусы:
- Значительно дороже в цене, чем коллекторные двигатели.
- Техническое обслуживание более узкоспециализированное.
Вывод: Несомненно бесколлекторные двигатели ориентированы на профессиональные работы с приличной нагрузкой. Несмотря на высокие показатели усовершенствованного типа двигателя, его единственный недостаток бьёт по кошельку. И перед тем, как приобретать инструмент на том или ином двигателе, прежде всего надо поставить перед собой вопрос: для каких целей он нужен.
Сколько людей — столько и мнений. Компания Greenworks старается делать качественную продукцию на разных типах двигателя, чтобы каждый мог подобрать себе инструмент по предпочтениям, функционалу и необходимой мощности под конкретные задачи, которые у каждого клиента свои. Именно поэтому, например, в разделе «Ручной инструмент» Вы можете наблюдать один тип агрегата на коллекторном и бесколлекторном двигателях. Какой лучше? Выбор за Вами!
Всегда интересные новости и статьи от команды сайта Green-Battery.ru
Копирование текстов возможно только со ссылкой на первоисточник.
В чем разница между щеточными и бесщеточными двигателями? — Worx Tools Russia
Все чаще на просторах интернет-магазинов можно найти инструменты с двумя типами двигателей. Инструменты и садовая техника WORX также не отстают от современных трендов при производстве техники, так что на нашем сайте вы тоже можете найти специальную характеристику двигателя — щеточный или бесщеточный.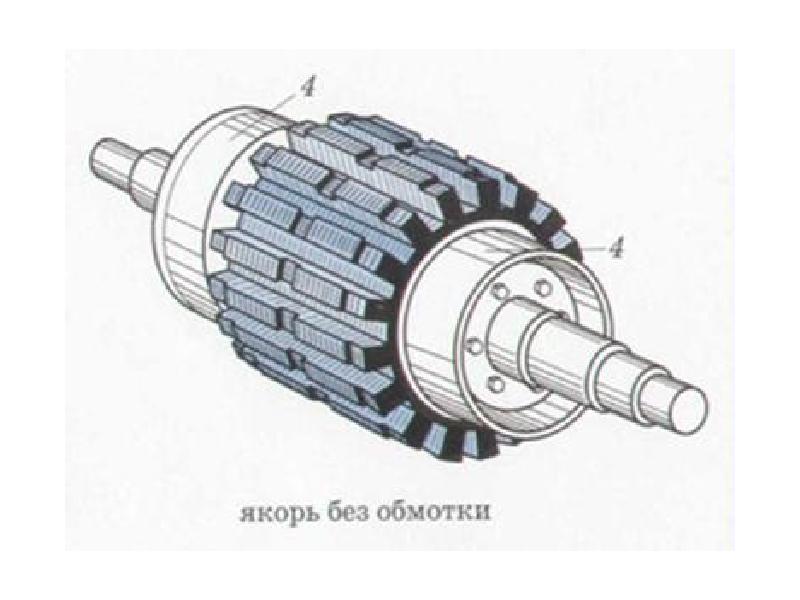 Так что же это за характеристика, на что она влияет и в чем принципиальные отличия инструментов с тем или иным двигателем? Давайте разбираться.
Так что же это за характеристика, на что она влияет и в чем принципиальные отличия инструментов с тем или иным двигателем? Давайте разбираться.
Устройство и принцип действия щеточного двигателя
Щеточный двигатель по-другому еще называется коллекторным. Состоит двигатель из нескольких важных частей.
Ротор — по-другому, якорь. Как раз он вращается внутри и преобразует электрическую энергию в механическую. Якорь обмотан медной проволокой (обмоткой) с разных сторон ротора. За счет прохождения тока через проволоку создается магнитное поле, которое в свою очередь и создает вращение элемента.
На обмотке в бесщеточном двигателе установлен коммутатор, который используется для переключения с одной обмотки на другую, что позволяет менять направление вращения ротора. Этот коммутатор и есть
Чтобы напряжение передалось на обмотки, а ток прошел через коллектор в двигатель устанавливаются специальные щетки. Щетки обычно состоят из графита; они всегда контактируют с коммутатором и обеспечивают подачу энергии к катушкам с обмоткой. Есть две щетки, и каждая из них подключается к противоположному полюсу батареи. Это гарантирует, что при вращении ротора ток, протекающий к катушкам, постоянно меняет направление. Это приводит к необходимому изменению магнитного поля, которое позволяет ротору продолжать вращаться.
Щетки обычно состоят из графита; они всегда контактируют с коммутатором и обеспечивают подачу энергии к катушкам с обмоткой. Есть две щетки, и каждая из них подключается к противоположному полюсу батареи. Это гарантирует, что при вращении ротора ток, протекающий к катушкам, постоянно меняет направление. Это приводит к необходимому изменению магнитного поля, которое позволяет ротору продолжать вращаться.
Все вышеописанные элементы установлены в статор. Статор — неподвижных элемент двигателя, в котором могут быть либо еще одна катушка с проволокой, либо постоянный магнит. За счет того или другого элемента и создается магнитное поле обратной полярности ротору, из-за чего тот вращается.
Коллекторные двигатели могут работать от переменного напряжения, так как при смене полярности ток в обмотках возбуждения и якоря также меняет направление, в результате чего вращательный момент не меняет своего направления.
Плюсы и минусы щеточного двигателя
Так мы с вами вкратце разобрались с устройством щеточного двигателя. Теперь в чем же его плюсы и минусы?
Теперь в чем же его плюсы и минусы?
Плюсы
- Первым плюсом инструментов со щеточными двигателями стоит отметить более низкую стоимость в отличие бесщеточных. Это связано с технологиями производства и более бюджетными материалами.
- Вторым плюсом специалисты отмечают упрощенную конструкцию двигателя, что влияет на стоимость ремонта. Проще поменять щетки, чем весь мотор в целом.
- Также к плюсам можно отнести относительно малый вес и размер инструментов.
Минусы
- На высоких оборотах увеличивается трение щёток. Отсюда вытекает проблема их быстрого износа. Помимо износа самих щеток, в процессе работы они стираются. Стертый графит может засорить коллектор и привести в полную негодность инструмент.
-
Также к минусам можно отнести более низкую мощность щеточных инструментов, в отличие от бесщеточных моделей. Это связано с тем, что щеточные двигатели физически не могут выдавать мощность выше 3 000 об./мин. Но такой мощности вполне достаточно для домашнего обихода.
- Еще одним минусом щеточных двигателей мы можем отметить наличие искрения во время работ. Обратите внимание, что при запуске инструмента щетки трутся о коллектор и создают видимые искры. Это значит, что работать щеточными инструментами нужно более аккуратно — убирать на расстояние все возможные легковоспламеняющиеся вещества и предметы, а также периодически делать перерывы в работе, во избежание перегрева двигателя.
- Последним минусом отметим не очень высокий КПД инструментов с коллекторным двигателем — всего 60%. Это значит, что инструменты несколько хуже справляются с прочными материалами (например, с металлом) и выполняют меньший объем работы за то же время, что бесщеточный инструмент.
 Это связано с тем, что щеточные двигатели физически не могут выдавать мощность выше 3 000 об./мин. Но такой мощности вполне достаточно для домашнего обихода.
Это связано с тем, что щеточные двигатели физически не могут выдавать мощность выше 3 000 об./мин. Но такой мощности вполне достаточно для домашнего обихода.
Устройство и принцип действия бесщеточного двигателя
Теперь давайте разберем принцип работы бесщеточного двигателя. Как понятно из названия, его принципиальное отличие в отсутствии щеток. Но как же он тогда работает? Как нужная энергия поступает в двигатель?
Как понятно из названия, его принципиальное отличие в отсутствии щеток. Но как же он тогда работает? Как нужная энергия поступает в двигатель?
В устройстве бесщеточного двигателя также присутствует ротор и статор — основные элементы любого мотора. Но при этом отсутствует коллектор, соответственно и двигатель по-другому называется бесколлекторным. Если у щеточного двигателя работа происходит за счет электро-механической смены полярности, то в бесщеточном двигателе все работает благодаря электромагнитной индукции. Также отличается местоположение обмотки — здесь она располагается на статоре, в отличие от предыдущего вида двигателя.
Вместо щеток и коллектора в бесщеточном двигателе установлены датчики Холла и контроллер, который контролирует подачу напряжения на катушки для создания индуктивности, а также положение ротора и скорость его вращения.
Когда плата подает на обмотку ток, создается тоже противоположное магнитное поле, и магниты на роторе начинают вращаться.
Еще одной особенностью бесщеточных двигателей нужно назвать их типы. Двигатели бывают двух типов — синхронный и асинхронный. В синхронном двигателе частота вращений ротора равна частоте вращений магнитного поля — то есть один оборот ротор совершает после одного полного прохождения тока через катушку. А в асинхронном двигателе обратная ситуация — частота вращений ротора меньше, чем частота вращения магнитного поля. То есть ток проходит через катушку быстрее.
Плюсы и минусы бесщеточного двигателя
Если с устройством бесщеточного двигателя мы разобрались, то теперь давайте рассмотрим положительные и отрицательные стороны инструментов с бесщеточными моторами.
Плюсы:
-
У инструментов с бесщеточным двигателем отсутствуют многие проблемы, которые встречаются у щеточных моделей. Так, первым плюсом специалисты отмечают бо́льшую износостойкость инструментов. Ввиду отсутствия щеток не создается трение внутри двигателя, соответственно нет внутренних загрязнений. Также отсутствие щеток снижает пожароопасность инструмента — при работе нет искрения, а значит можно работать практически в любых условиях.
- Вторым плюсом стоит отметить упрощенную регулировку крутящего момента — в отличие от щеточных моделей, у бесколлекторных инструментов достаточно просто нажать соответствующую кнопку на инструменте. Причем регулировка может иметь до 15 уровней и переключаться в одно мгновение.
-
Одним из ключевых преимуществ бесщеточных моделей нужно отметить экономию расходуемой энергии. Этот пункт особенно актуален для аккумуляторных инструментов. Благодаря экономии инструменты работают до 50% дольше, чем модели со щеточным двигателем. Также КПД бесколлекторных инструментов намного выше — инструмент выполняет 90% поставленных задач, против 60% у коллекторных моделей. Это значит, что бесщеточными инструментами можно работать практически с любым материалом без потери мощности.
- Помимо вышеуказанных преимуществ инструментов с бесщеточным двигателем, они еще могут разгоняться до максимальных показателей и имеют быстрый запуск сразу с больших скоростей, чем не могут похвастаться щеточные инструменты.
 Ввиду отсутствия щеток не создается трение внутри двигателя, соответственно нет внутренних загрязнений. Также отсутствие щеток снижает пожароопасность инструмента — при работе нет искрения, а значит можно работать практически в любых условиях.
Ввиду отсутствия щеток не создается трение внутри двигателя, соответственно нет внутренних загрязнений. Также отсутствие щеток снижает пожароопасность инструмента — при работе нет искрения, а значит можно работать практически в любых условиях.
 Это значит, что бесщеточными инструментами можно работать практически с любым материалом без потери мощности.
Это значит, что бесщеточными инструментами можно работать практически с любым материалом без потери мощности.
Минусы:
Но не бывает все настолько радужно. Даже у инструментов с бесщеточными двигателями есть и свои недостатки. Так сказать, ложка дегтя в бочке меда.
- К минусам, в первую очередь стоит отнести стоимость инструментов. Техника с бесщеточным мотором в цене дороже, чем упрощенные модели со щеточным двигателем.
-
Вторым недостатком бесколлекторных инструментов может быть сложное и дорогое техническое обслуживание. Бесщеточный двигатель — технологичное устройство, для работы с которым нужны знания в микроэлектронике. К счастью, в сотрудники наших сервисных центров знают и умеют обслуживать бесколлекторные двигатели.
 К счастью, в сотрудники наших сервисных центров знают и умеют обслуживать бесколлекторные двигатели.
К счастью, в сотрудники наших сервисных центров знают и умеют обслуживать бесколлекторные двигатели.
Итоги сравнения щеточного и бесщеточного двигателей
Если сравнивать инструменты с разными видами двигателей, то можно смело сказать, что техника с бесщеточным двигателем надежнее и мощнее. Но нужно учитывать тот факт, что ориентирована такая техника больше на профессиональные работы. В быту же и инструменты со щеточным двигателем отлично справятся со своими задачами. Потому перед покупкой инструмента заранее определите цели, для которых вы будете использовать инструменты.
В ассортименте компании WORX есть инструменты и со щеточными и с бесщеточными двигателями. Чтобы определить какой именно тип двигателя установлен в инструменте, обратите внимание на иллюстрацию в карточке товара — в бесщеточных моделях есть специальная пометка «BRUSHLESS MOTOR».
Устройство и принцип работы электроинструмента
Содержание:
- 1. Коллекторный электродвигатель постоянного тока
- 1.1. Принцип действия
- 1.2. Недостатки
- 2. Бесколлекторный двигатель
- 3. Редуктор
- 3.1. Особенности редукторов
- 4. Устройства управления
- 5. Для безопасной работы
 Коллекторный электродвигатель постоянного тока
Коллекторный электродвигатель постоянного токаДвигатель, редуктор, устройства управления и детали для безопасной работы — вот основные узлы каждого электроинструмента. Для ручной машины важно, что бы она была как можно легче и меньше. Кроме того, от нее требуется высокая скорость, которую можно регулировать. Этим условиям отвечают двигатели постоянного тока. Они подразделяются на коллекторные и вентильные.
Коллекторный электродвигатель постоянного тока
Что бы понять, как электрическая энергия превращается в механическую, познакомимся с устройством двигателя. Его основные узлы: статор (индуктор), ротор (якорь) и примыкающий к нему щеточноколлекторный узел.
Статор — неподвижная стальная деталь, к которой прикрепляются главные и добавочные полюсы. Обмотка главных полюсов создает магнитное поле, а добавочная улучшает работу коллектора.
Обмотка главных полюсов создает магнитное поле, а добавочная улучшает работу коллектора.
Вращающийся ротор устанавливается на валу. Он состоит из сердечника и обмотки. Ее концы соединяются с пластинами коллектора, к которому, в свою очередь, примыкают щетки — через них обмотка якоря соединяется с внешней цепью. Щетки занимают определенное положение по отношению к полюсам двигателя. В некоторых электроинструментах имеется поворотный щеткодержатель-траверса, благодаря ему положение щеток можно изменять. Это позволяет сохранить мощность при работе в режиме реверса. В остальных случаях вращение в обратном режиме включают электронные магнитные пускатели.
Принцип действия
Двигатель работает за счет электромагнитной индукции. При подаче напряжения на графитовые щетки, они замыкаются с ротором. По его обмотке проходит электрический ток. Так как ротор находится внутри магнитного поля статора, на него начинают действовать силы Ампера. На концах якоря они направлены в противоположные стороны, что создает крутящий момент. Ротор поворачивается на 180°. В этот момент крутящий момент становится равным нулю. Что бы вращение продолжалось необходимо переключить направление тока — провести коммутацию. По коллектору, который начал вращаться вместе с ротором, скользят щетки, в нужный момент они переходят с одной пластины на другую, меняя направление тока в обмотках ротора.
Ротор поворачивается на 180°. В этот момент крутящий момент становится равным нулю. Что бы вращение продолжалось необходимо переключить направление тока — провести коммутацию. По коллектору, который начал вращаться вместе с ротором, скользят щетки, в нужный момент они переходят с одной пластины на другую, меняя направление тока в обмотках ротора.
Частота вращения двигателя регулируется за счет изменения магнитного поля статора, которое в свою очередь генерируется током возбуждения двигателя. На этот ток можно повлиять реостатом, транзистором, т. е. любым устройством с активным сопротивлением. Таким образом, осуществляется электронная регулировка скорости.
Недостатки
Слабое место коллекторного двигателя — графитовые щетки, в процессе эксплуатации они истираются. При интенсивной нагрузке их приходится часто заменять. Кроме того, такой двигатель шумит и вибрирует во время работы, особенно на больших скоростях. Бороться с этими недостатками помогает использование в конструкциях качественных деталей и внешних антивибрационных элементов.
Бесколлекторный двигатель
Существует вид двигателей постоянного тока, в которых отсутствует щеточно-коллекторный узел. Ток в них изменяется с помощью электронных переключателей, что избавляет конструкцию от наличия щеток. Такие моторы называют вентильными. Принцип их работы аналогичен описанному выше. От коллекторных их отличает конструкция: магниты размещены на роторе, а обмотка на статоре.
Датчик углового положения ротора указывает электронному блоку, когда нужно менять направление тока. Единственный недостаток вентильного двигателя — дорогостоящие детали. По этой причине в ручных электроинструментах в основном используются коллекторные двигатели, с вентильным — лишь единичные модели: компании Makita и Hitachi предлагают аккумуляторные ударные шуруповерты, называя их инструментами будущего.
Редуктор
Механическую энергию, которую вырабатывает двигатель, нужно передать на рабочий орган машины (шпиндель). Эту функцию выполняет редуктор. Часто его называют понижающим. Скорость вращения входного вала высокая, механическая передача (одна или несколько) преобразует ее так, что на выходном валу получается меньшее число оборотов, но высокий крутящий момент.
Скорость вращения входного вала высокая, механическая передача (одна или несколько) преобразует ее так, что на выходном валу получается меньшее число оборотов, но высокий крутящий момент.
В ручных машинах применяют разнообразные виды механических передач: зубчатая, ременная, цепная, планетарная. В большинстве случаев на выходе получается вращение. Но есть инструменты, в которых этот вид движения преобразуется в другой.
Ударный механизм перфоратора работает следующим образом. На валу установлен «пьяный» подшипник — качающийся привод, которой преобразует вращательное движение от двигателя в поступательное — цилиндра. В пространстве между цилиндром, поршнем и бойком, находится воздух. Он сжимается и заставляет поршень перемещаться сначала вперед к бойку, а затем возвращает его в исходное положение.
Редуктор электролобзика преобразует вращение вала двигателя в возвратно-поступательное движение ползуна. Расположенный вертикально ползун перемещает пилку вниз и вверх. Пилка опирается на опорный ролик.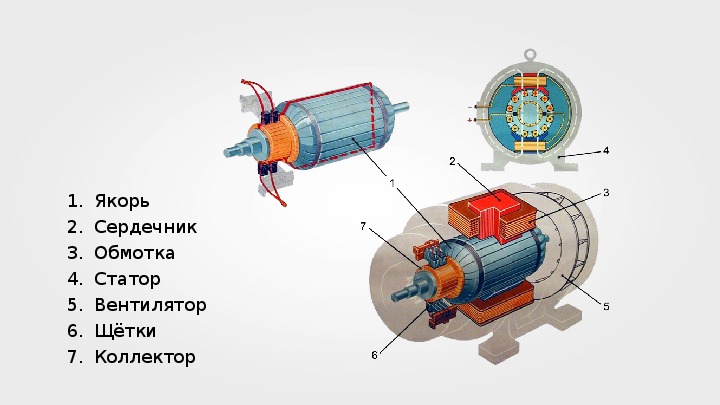 Наличие функции маятникового хода означает, что опорный ролик и вилка, на которой он держится, могут отклоняться назад. В результате пилка, кроме основного, совершает движение вперед и назад. Это увеличивает скорость прямолинейного реза. Ступени маятникового хода задаются степенью отклонения ролика.
Наличие функции маятникового хода означает, что опорный ролик и вилка, на которой он держится, могут отклоняться назад. В результате пилка, кроме основного, совершает движение вперед и назад. Это увеличивает скорость прямолинейного реза. Ступени маятникового хода задаются степенью отклонения ролика.
В вибрационных шлифмашинах эксцентрик, установленный на валу, так преобразует вращательное движение, что подошва всего лишь колеблется с маленькой амплитудой. В эксцентриковых шлифовальных машинах вращательное движение рабочего органа сохраняется, но эксцентрик добавляет ему колебания. Такие преобразования позволяют выполнять с помощью этих инструментов тонкую шлифовку.
Особенности редукторов
Для пользователя имеет значение, из каких деталей изготовлен редуктор, от этого зависит его надежность и срок службы всего электроинструмента. В моделях бытового класса часто используются шестерни из пластмассы, в профессиональных — редуктор полностью металлический. Преимуществом считается, если и корпус то же выполнен из металла. В этом случае инструмент лучше выдерживает большие нагрузки и удары.
В этом случае инструмент лучше выдерживает большие нагрузки и удары.
Важной функцией, которую может выполнять редуктор, является ступенчатое изменение частоты вращения выходного вала. Она доступна на отдельных моделях дрелей, шуруповертов. Механическое переключение скоростей позволяет работать с меньшей скоростью и большим крутящим моментом на первой передаче и с более высоким числом оборотов — на второй. Если сравнить технические характеристики в цифрах, то можно сразу заметить, что инструменты с двухскоростным (трехскоростные встречаются редко) редуктором отличаются большим числом оборотов по сравнению с обычными моделями, в которых обороты регулируются только электроникой. Эта особенность обеспечивает высокую производительность и оптимальный подбор режима работы.
Устройства управления
Для питания двигателя в электроинструментах используются различные схемы, в том числе микропроцессорные электроприводы. Обязательным элементом любой системы является выпрямитель.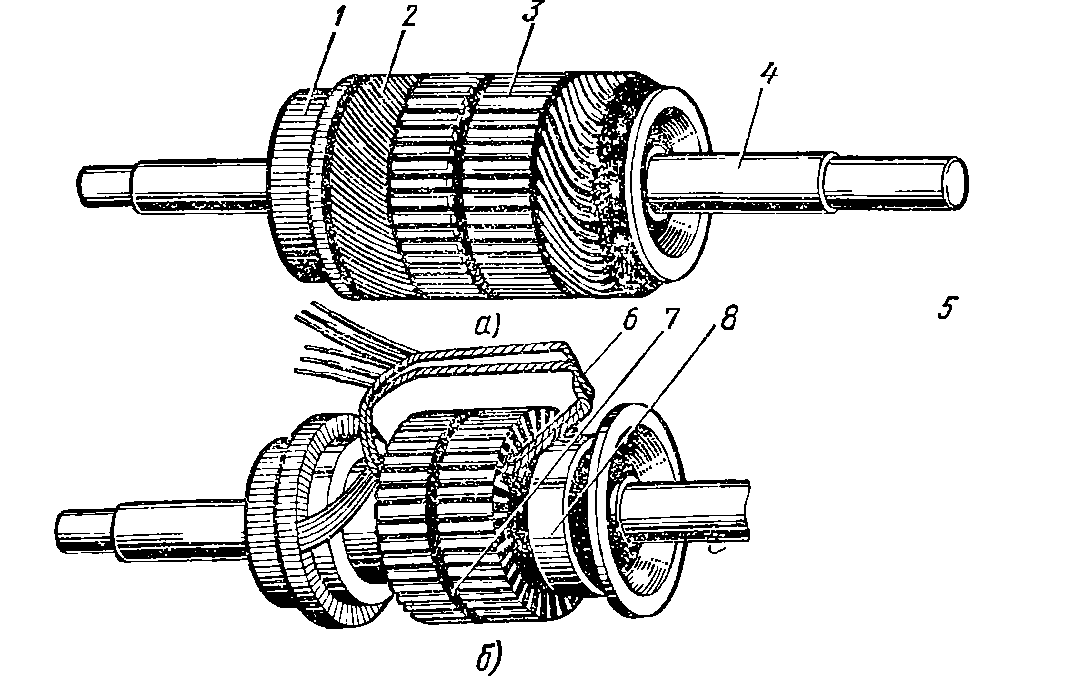 Он преобразует переменный ток сети в постоянный, который подается на электродвигатель. В аккумуляторных инструментах, которые питаются от батарей, выпрямитель не требуется.
Он преобразует переменный ток сети в постоянный, который подается на электродвигатель. В аккумуляторных инструментах, которые питаются от батарей, выпрямитель не требуется.
Скорость вращения регулирует преобразователь частоты. Самый простой его вариант — это несколько реле, с помощью которых число оборотов можно установить вручную. В систему так же могут входить магнитные пускатели с кнопкой для изменения направления вращения двигателя (функция реверса). Устройство управления двигателем размещают под рукояткой или вблизи нее, где на корпус выводятся курок-выключатель, колесико регулировки скорости, кнопка реверса.
Для безопасной работы
К ручным инструментам предъявляются особые требования, связанные с безопасностью работы. Электропроводящие детали покрывают специальным материалом для защиты пользователя от поражения током. Многие производители, кроме основной изоляции, на случай ее повреждения, применяют дополнительную, получая, таким образом, двойную. Остальные защитные устройства, такие как муфты, фиксаторы применяются в зависимости от вида инструмента.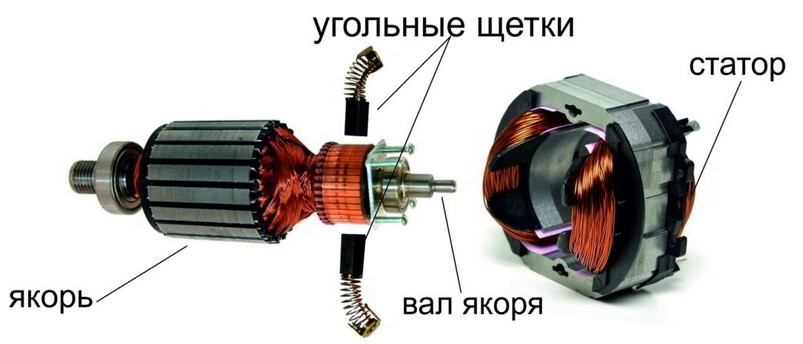
преимущества и недостатки разных видов
Коллекторные электродвигатели стоят в стиральных машинах (но не во всех моделях), пылесосах, электроинструменте, детских игрушках и т. д. Главной отличительно их особенностью является наличие неподвижных обмоток статора и обмоток на валу (якорь), на которые подается напряжение при помощи коллектора и графитных щеток.
Если у Вас сломался или барахлит мотор в электроинструменте и других устройствах, то не спешите его выкидывать, потому что в большинстве случаев его можно быстро и недорого отремонтировать своими руками. Как определить и устранить неисправность Вы узнаете далее из этой статьи.
Перед тем как начать искать причину в электродвигателях, сначала проверьте исправность шнура питания, кнопок включения и при наличии пуск-регулировочных устройств.
Как проверить коллекторный электродвигатель- наиболее частые поломки
Для определения и устранения неисправностей придется разбирать сам электроинструмент или электродвигатель других бытовых устройств по . Только перед тем как приступить к разборке, обратите внимание на искрение в контактно-щеточном механизме. Если оно будет повышенным (как на рисунке у нижней щетки), то это может свидетельствовать об износе или плохом контакте щеток, реже о межвитковом замыкании в коллекторе.
Только перед тем как приступить к разборке, обратите внимание на искрение в контактно-щеточном механизме. Если оно будет повышенным (как на рисунке у нижней щетки), то это может свидетельствовать об износе или плохом контакте щеток, реже о межвитковом замыкании в коллекторе.
В большинстве случаев причиной поломок коллекторных двигателей является износ щеток и почернение коллектора. Изношенные щетки необходимо заменить новыми одинаковыми по форме и размерам, лучше конечно оригинальными. Меняются они очень просто- либо нужно снять или сдвинуть фиксатор или открутить болт. В некоторых моделях меняются не сами щетки, а в сборе с щеткодержателем. Не забываем подключить к контакту медный поводок. Если же щетки целы, тогда растяните прижимающие их пружины.
Если контактная часть коллектора потемнела , тогда ее необходимо обязательно почистить мелкой наждачной бумагой (нулевкой).
Иногда вместе контакта щеток с коллектором образовывается канавка. Ее необходимо проточить на станке.
На втором месте по количеству неисправностей стоит износ подшипников. О необходимости их замены в электроинструменте свидетельствует биение патрона и повышенная вибрация корпуса при работе. Как проверить и заменить подшипники подробно рассказано в . В самых запущенных случаях начинают при вращении касаться якорь и статор- придется как минимум менять якорь.
Как проверить коллекторный электродвигатель- редкие поломки
Гораздо реже происходит обрыв или выгорание в обмотках или в местах их подключения, оплавление или замыкание графитовой пылью ламелей коллектора.
В большинстве случаев это удается определить внешним осмотром. При этом обращайте внимание на:
- Целостность обмоток.
- Почернение обмоток либо всей, либо ее части.
- Надежность контактов выводов проводов с ламелями коллектора. При необходимости перепаяйте.
- Забита ли графитовой пылью пространство между ламелями. Если да то почистите.
- Наличие характерного запаха горения изоляции проводов.

Если обнаружено визуально повреждение обмотки стартера или якоря, то их потребуется заменить на новые или сдать в перемотку.
Но не всегда визуально возможно определить повреждение обмоток, поэтому следует воспользоваться мультиметром для этих целей.
Как прозвонить электродвигатель мультиметром
Включите мультиметр в режим прозвонки или омметра с пределом измерения 50-100 Ом. Как это сделать читаем а .
Иногда возникает межвитковое замыкание в обмотке, тогда определить его возможно только при помощи специального устройства- прибора проверки якорей.
Похожие материалы.
Якорь электродвигателя относится к вращающейся части, на которой собирается грязь, образуется нагар. При неисправностях можно провести диагностику в домашних условиях визуально и при помощи мультиметра. На трущихся поверхностях не должно быть сколов, царапин и трещин. При обнаружении таковых проводят меры по их устранению.
Типичные неисправности
Якорь электродвигателя при нормальных режимах работы не подвергается износу. Заменяют только щетки, замеряя допустимую длину. Но при длительных нагрузках обмотки статора начинают нагреваться, что приводит к образованию нагара.
Заменяют только щетки, замеряя допустимую длину. Но при длительных нагрузках обмотки статора начинают нагреваться, что приводит к образованию нагара.
Из-за механических воздействий якорь электродвигателя может перекоситься при повреждении подшипниковых узлов. Двигатель будет работать, но постепенный износ ламелей или пластин приведет к окончательному выходу его из строя. Но для спасения недешевого оборудования часто достаточно провести профилактический ремонт и прибором можно будет пользоваться длительное время.
К негативным факторам, влияющим на якорь электродвигателя, относят попадание влаги на металлические поверхности. Критичным является длительное воздействие влажности и появление ржавчины. Из-за рыжих скоплений и грязи происходит повышение трения, это увеличивает токовую нагрузку. Контактные части греются, припой может отслаиваться, создавая периодическую искру.
В сервисном центре могут помочь, но это потребует определённых затрат. С поломкой можно справиться и самостоятельно, ознакомившись с вопросом: как проверить якорь электродвигателя в домашних условиях.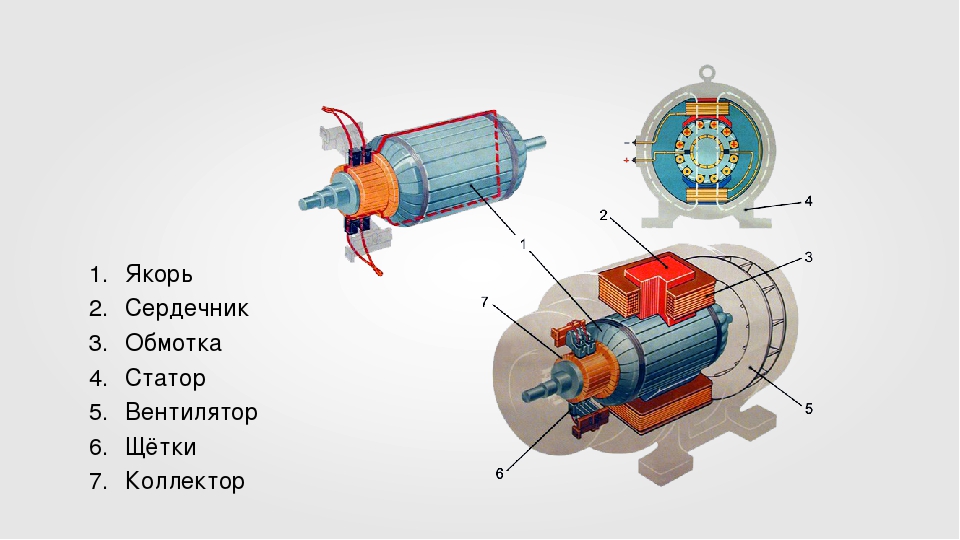 Для диагностики понадобится прибор, замеряющий сопротивление и инструменты.
Для диагностики понадобится прибор, замеряющий сопротивление и инструменты.
Как проводится диагностика неисправности?
Проверка якоря электродвигателя начинается с определения самой неисправности. Полный выход из строя этого узла происходит из-за рассыпавшихся щеток коллектора, разрушения слоя диэлектрика между пластинами, а также за счет короткого замыкания в электрической цепи. В случае искрения внутри прибора делают вывод об износе или повреждении токосъемников.
Искрение щеток начинается из-за появления зазора в месте контакта с коллектором. Этому предшествует падение прибора, высокая нагрузка на вал при заклинивании, а также нарушение целостности припоя на выводах обмоток.
Неисправность на работающем электродвигателе проявляется типичными состояниями:
- Искрение основной признак неисправности.
- Гул и трение при вращении якоря.
- Ощутимая вибрация при работе.
- Смена направления вращения при прохождении якорем траектории менее оборота.
- Появление запаха оплавляющейся пластмассы либо сильный нагрев корпуса.

Что делать при появлении перечисленных отклонений в работе?
Частота вращения якоря электродвигателя поддерживается постоянной. При холостых оборотах неисправность может не проявляться. Под нагрузкой трение компенсируется увеличением тока, протекающего через обмотки. Если стали заметны отклонения в работе болгарки, дрели, стартера, то нужно снять подачу напряжения.
Дальнейшая эксплуатация приборов может привести к пожару или к поражению человека электрическим током. Первым делом рекомендуется осмотреть корпус изделия, оценить проводку на целостность, отсутствие оплавленных частей и повреждения изоляции. На ощупь проверяют температуру всех частей прибора. Рукой пробуют вращать якорь, он должен перемещаться легко, без заеданий. Если механические части целые и нет загрязнений переходят к разборке.
Диагностика внутренних частей
Обмотка якоря электродвигателя не должна иметь нагара, тёмных пятен, похожих на последствия перегрева. Поверхность контактных частей и области зазора не должна быть зосоренной. Мелкие частицы снижают мощность двигателя и повышают ток. Не стоит производить разборку приборов с включенной в сеть вилкой в целях безопасности проведения работ.
Поверхность контактных частей и области зазора не должна быть зосоренной. Мелкие частицы снижают мощность двигателя и повышают ток. Не стоит производить разборку приборов с включенной в сеть вилкой в целях безопасности проведения работ.
Рекомендуется проводить съемку процесса разборки для исключения сложностей при обратном процессе. Либо можно записывать на листок каждый шаг своих действий. Допускается некоторый износ щеток, ламелей. Но при обнаружении царапин следует выяснить причину их происхождения. Возможно, этому поспособствовала трещина в корпусе, которую можно заметить только при нагрузке.
Работа омметром
Искренние могло происходить из-за пропадания электрического контакта в одной из ламелей. Для замера сопротивления рекомендуется ставить щупы со стороны токосъемников. Вращая вал двигателя, наблюдают за показаниями циферблата. На экране должны быть нулевые значения. Если проскакивают цифры даже в несколько Ом, то это говорит о нагаре. При появлении бесконечного значения судят об обрыве в цепи.
Независимо от результатов далее следует проверить сопротивление между каждыми соседними ламелями. Оно должно быть одинаковым для каждого замера. При отклонениях нужно осмотреть все соединения катушек и поверхность прилегания щёток. Сами щетки должны иметь равномерный износ. При сколах и трещинах они подлежат замене.
Катушки соединяются с сердечником проводкой, которая могла отслоиться. Припой часто не выдерживает ударов от падений. У стартера ток через контакты может достигать 50А, что приводит к прогоранию некачественных соединений. Внешним осмотром определяют места повреждений. Если не обнаружили неисправности, то проводят замер сопротивления между ламелью и самой катушкой.
Если нет омметра?
При отсутствии мультиметра потребуется источник питания 12 Вольт и лампочка на соответствующее напряжение. У любого автолюбителя с таким набором не возникнет проблем. На вилку электроприбора подключают плюсовую и минусовую клеммы. В разрыв ставится лампа накаливания. Результат наблюдают визуально.
Результат наблюдают визуально.
Вал якоря вращают рукой, лампа горит без скачков яркости. Если наблюдается затухание судят о неисправном двигателе. Скорее всего, произошло межвитковое замыкание. Полное пропадание свечения свидетельствует об обрыве в цепи. Причинами могут быть неконтакт щеток, обрыв в обмотке или отсутствие сопротивления в одной из ламелей.
Как «оживить» неисправный прибор?
Ремонт якоря электродвигателя начинают только после полной уверенности в неисправности узла. Царапины и сколы на ламелях убирают круговой проточкой поверхности. Нагар и копоть можно снять чистящими средствами для контактных электрических соединений. Разбитые подшипники перепрессовывают и меняют на новые. Важно соблюсти балансировку вала при сборке.
Вращение должно быть лёгким и без шума. Поврежденную изоляцию восстанавливают, можно использовать обычную изоленту. Соединения, вызывающие подозрения, лучше пропаять заново. При проблемах с катушками якоря рекомендуется прибегнуть к перемотке, которую можно выполнить самостоятельно.
Восстановление катушек
Перемотать якорь электродвигателя можно в условиях гаража, только требуется быть осторожным при нанесении каждого витка. Медная проводка подбирается аналогичной намотанной. Сечение нельзя менять, это приведёт к нарушению скоростных режимов работы двигателя. Бумага диэлектрическая потребуется для отделения обмоток. Катушки в конце заливают лаком.
Потребуется паяльник и навыки его использования. Места соединений обрабатывают кислотой, для нанесения оловянно-свинцового припоя пользуются канифолью. При демонтировании старой обмотки подсчитывают количество витков и наносят аналогичное количество новой намотки.
Корпус должен быть очищен от старого лака и других включений. Для этого подходит напильник, наждачка или горелка. Для якоря изготавливают гильзы, материалом служит электротехнический картон. Полученные заготовки укладывают в пазы. Намотанные катушки следует делать правыми витками. Выводы со стороны коллектора перематывают капроновой нитью.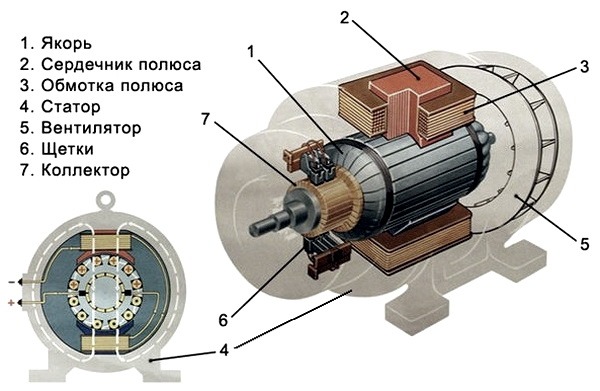
Каждый провод припаивается к соответствующей ламели. Сборка должна заканчиваться очередными замерами сопротивления контактных соединений. Если все в норме и нет можно проверять работу электродвигателя под напряжением.
Cтраница 1
Якорь электродвигателя состоит из вала, на который напрессовывается сердечник, набранный из лакированной электротехнической стали толщиной 0 5 мм, с пазами для обмотки, и коллектор. Обмотка якоря двухслойная с диаметральным шагом из провода марки ПЭЛШКО. Коллектор набирается из пластин красной меди, изолированных друг от друга миканитовыми прокладками. Армирование коллектора выполняется на пластмассе и осуществляется при помощи стальных колец, укладываемых перед опрессовкой коллектора в выточки, имеющие форму ласточкиного хвоста. Для предотвращения замыкания коллекторных пластин кольца перед укладкой изолируются лентой из стекловолокна. В результате армирования прочность коллектора увеличивается. Присоединение обмотки к коллектору производится так же, как и в двигателях постоянного тока.
Якорь электродвигателя разбирают в такой последовательности: отвертывают конусный ролик 4 (см. рис. 82) с вала якоря; при помощи съемника спрессовывают подшипник 5 и вентилятор 8; снимают маслоотбойные кольца 2; заменяют негодные подшипники, снимают обмотку, наматывают новую, собирают якорь и электродвигатель. Центровку якоря по горизонтали производят крышкой (заглушкой) 19 подшипника.
Якорь электродвигателя состоит из пакета пластин трансформаторной стали, якорной обмотки, вентилятора (крыльчатки) и коллектора. Коллектор якоря имеет медные пластины (ламели), между которыми положены прокладки из миканита.
| Схема вращения натирочных. |
Якорь электродвигателя состоит из пакета пластин трансфор-матерной стали, якорной обмотки, вентилятора (крыльчатки) и коллектора.
Якорь электродвигателя вращается на двух подшипниках, расположенных в подшипниковых щитах. На валу якоря для охлаждения электродвигателя имеется центробежный вентилятор. Воздух засасывается через жалюзи крышек подшипникового щита со стороны коллектора, проходит через машину и выбрасывается вентилятором через решетки верхнего подшипникового щита.
Воздух засасывается через жалюзи крышек подшипникового щита со стороны коллектора, проходит через машину и выбрасывается вентилятором через решетки верхнего подшипникового щита.
Якорь электродвигателя вращается в двух самоустанавливающихся бронзографитовых втулках, пропитанных турбинным маслом.
Якорь электродвигателя собран из листов 7 такой же формы, как и якорь двигателя ДП-4. Катушки 6 обмотки якоря намотаны на зубцы сердечника и изолированы от них полосками электрокартона. Три выводных конца катушек якоря соединены между собой, а три другие припаяны к трем коллекторным пластинам, запрессованным в пластмассу.
Электрические двигатели предназначены для преобразования электрической энергии в механическую. Первые их прототипы были созданы в 19 веке, а сегодня эти устройства максимально интегрированы в жизнь современного человечества. Примеры их использования можно встретить в любой сфере жизнедеятельности: от общественного транспорта до домашней кофемолки.
Электрический двигатель: вид в разрезе
Принцип преобразования энергии
Принцип работы электродвигателя любого типа заключается в использовании электромагнитной индукции, возникающей внутри устройства после подключения в сеть. Для того чтобы понять, как эта индукция создается и приводит элементы двигателя в движение, следует обратиться к школьному курсу физики, объясняющему поведение проводников в электромагнитном поле.
Для того чтобы понять, как эта индукция создается и приводит элементы двигателя в движение, следует обратиться к школьному курсу физики, объясняющему поведение проводников в электромагнитном поле.
Итак, если мы погрузим проводник в виде обмотки, по которому движутся электрические заряды, в магнитное поле, он начнет вращаться вокруг своей оси. Это связано с тем, что заряды находятся под влиянием механической силы, изменяющей их положение на перпендикулярной магнитным силовым линиям плоскости. Можно сказать, что эта же сила действует на весь проводник.
Схема, представленная ниже, показывает токопроводящую рамку, находящуюся под напряжением, и два магнитных полюса, придающие ей вращательное движение.
Именно эта закономерность взаимодействия магнитного поля и токопроводящего контура с созданием электродвижущей силы лежит в основе функционирования электродвигателей всех типов. Для создания аналогичных условий в конструкцию устройства включают:
- Ротор (обмотка) – подвижная часть машины, закрепленная на сердечнике и подшипниках вращения. Она исполняет роль токопроводящего вращательного контура.
- Статор – неподвижный элемент, создающий магнитное поле, воздействующее на электрические заряды ротора.
- Корпус статора. Оснащен посадочными гнездами с обоймами для подшипников ротора. Ротор размещается внутри статора.
 Она исполняет роль токопроводящего вращательного контура.
Она исполняет роль токопроводящего вращательного контура.Для представления конструкции электродвигателя можно создать принципиальную схему на основе предыдущей иллюстрации:
После включения данного устройства в сеть, по обмоткам ротора начинает идти ток, который под воздействием магнитного поля, возникающего на статоре, придает ротору вращение, передаваемое на крутящийся вал. Скорость вращения, мощность и другие рабочие показатели зависят от конструкции конкретного двигателя и параметров электрической сети.
Классификация электрических двигателей
Все электродвигатели между собой классифицируют в первую очередь по типу тока, протекающему через них. В свою очередь, каждая из этих групп тоже делить на несколько видов, в зависимости от технологических особенностей.
Двигатели постоянного тока
На маломощных двигателях постоянного тока магнитное поле создается постоянным магнитом, устанавливаемым в корпусе устройства, а обмотка якоря закрепляется на вращающемся валу. Принципиальная схема ДПТ выглядит следующим образом:
Обмотка, расположенная на сердечнике, изготавливается из ферромагнитных материалов и состоит из двух частей, последовательно соединенных между собой. Своими концами они подсоединяются к коллекторным пластинам, к которым прижимаются графитовые щетки. На одну из них подается положительный потенциал от источника постоянного тока, а на другую – отрицательный.
После подачи питания на двигатель происходит следующее:
- Ток от нижней «плюсовой» щетки подается на ту коллекторную пластину, к контактной платформе которой она подключена.
- Прохождение тока по обмотке на коллекторную пластину (обозначено пунктирной красной стрелкой), подключенную к верхней «отрицательной» щетке создает электромагнитное поле.
- Согласно правилу буравчика, в правой верхней части якоря возникает магнитное поле южного, а в левой нижней — северного магнитного полюса.
- Магнитные поля с одинаковым потенциалом отталкиваются друг от друга и приводят ротор во вращательное движение, обозначенное на схеме красной стрелкой.
- Устройство коллекторных пластин приводит к смене направления протекания тока по обмотке во время инерционного вращения, и рабочий цикл повторяется вновь.

Самый простой электрический двигатель
При очевидной простоте конструкции существенным недостатком таких двигателей является низкий КПД, обусловленный большими потерями энергии. Сегодня ДПТ с постоянными магнитами используются в простых бытовых приборах и детских игрушках.
Устройство двигателей постоянного тока большой мощности, используемых в производственных целях, не предусматривает использование постоянных магнитов (они занимали бы слишком много места). В этих машинах используется следующая конструкция:
- обмотка состоит из большего количества секций, представляющих собой металлический стержень;
- каждая обмотка отдельно подключается к положительному и отрицательному полюсу;
- количество контактных площадок на коллекторном устройстве соответствует количеству обмоток.

Таким образом, снижение потерь электроэнергии обеспечивается плавным подключением каждой обмотки к щеткам и источнику питания. На следующей картинке представлена конструкция якоря такого двигателя:
Устройство электрических двигателей постоянного тока позволяет легко обратить направление вращения ротора с помощью простой смены полярности на источнике питания.
Функциональные особенности электродвигателей определяются наличием некоторых «хитростей», к которым относится сдвиг токосъемных щеток и несколько схем подключения.
Сдвиг узла токосъемных щеток относительно вращения вала происходит после запуска двигателя и изменения подаваемой нагрузки. Это позволяет компенсировать «реакцию якоря» — эффект, снижающий эффективность машины за счет торможения вала.
Есть три способа подключения ДПТ:
- Схема с параллельным возбуждением предусматривает параллельное подключение независимой обмотки, как правило, регулируемой реостатом. Так обеспечивается максимальная стабильность скорости вращения и её плавная регулировка. Именно благодаря этому двигатели с параллельным возбуждением находят широкое применение в грузоподъемном оборудовании, на электрическом транспорте и станках.
- Схема с последовательным возбуждением тоже предусматривает использование дополнительной обмотки, но подключается она последовательно с основной. Это позволяет при необходимости резко увеличить крутящий момент двигателя, к примеру, на старте движения железнодорожного состава.
- Смешанная схема использует преимущества обоих способов подключения, описанных выше.
Биполярный электрический двигатель
Двигатели переменного тока
Главным отличием этих двигателей от описанных ранее моделей заключается в токе, протекающем по их обмотке. Он описывает по синусоидальному закону и постоянно меняет свое направление. Соответственно и питание этих двигателей осуществляется от генераторов со знакопеременной величиной.
Одним из главных конструктивных отличий является устройство статора, представляющего собой магнитопровод со специальными пазами для расположения витков обмотки.
Двигатели переменного тока классифицируют по принципу работы на синхронные и асинхронные. Коротко говоря, это означает, что в первых частота вращения ротора совпадает с частотой вращения магнитного поля в статоре, а во вторых – нет.
Синхронные двигатели
В основе работы синхронных электродвигателей переменного тока тоже лежит принцип взаимодействия полей, возникающих внутри устройства, однако в их конструкции постоянные магниты закрепляются на роторе, а по статору проводится обмотка. Принцип их действия демонстрирует следующая схема:
Проводники обмотки, по которой проходит ток, показанные на рисунке в виде рамки. Вращение ротора происходит следующим образом:
- На определенный момент времени ротор с закрепленным на нем постоянным магнитом находится в свободном вращении.
- На обмотке в момент прохождения через нее положительной полуволны формируется магнитное поле с диаметрально противоположными полюсами Sст и Nст. Оно показано на левой части приведенной схемы.
- Одноименные полюса постоянного магнита и магнитного поля статора отталкиваются друг от друга и приводят двигатель в положение, показанное на правой части схемы.
В реальных условиях для создания постоянного плавного вращения двигателя используется не одна катушка обмотки, а несколько. Они поочередно пропускают через себя ток, благодаря чему создается вращающееся магнитное поле.
Асинхронные двигатели
А асинхронном двигателе переменного тока вращающееся магнитное поле создается тремя (для сети 380 В) обмотками статора. Их подключение к источнику питания осуществляется через клеммную коробку, а охлаждение — вмонтированным в двигатель вентилятором.
Ротор, собранный из нескольких замкнутых между собой металлических стержней, жестко соединен с валом, составляя с ним одно целое. Именно из-за соединения стержней межу собой этот тип ротора называется короткозамкнутым. Благодаря отсутствию токопроводящих щеток в данной конструкции значительно упрощается техническое обслуживание двигателя, увеличивается срок службы и надежность. Главной причиной выхода из строя двигателей этого типа является износ подшипников вала.
Принцип работы асинхронного двигателя основывается на законе электромагнитной индукции – если частота вращения электромагнитного поля обмоток статора превышает частоту вращения ротора, в нем наводится электродвижущая сила. Это важно, поскольку при одинаковой частоте ЭДС не возникает и, соответственно, не возникает вращения. В действительности нагрузка на вал и сопротивление от трения подшипников всегда замедляет ротор и создает достаточные для работы условия.
Главным недостатком двигателей данного типа является невозможность получения постоянной частоты вращения вала. Дело в том, что рабочие характеристики устройства изменяются в зависимости от различных факторов. К примеру, без нагрузки на вал циркулярная пила вращается с максимальной скоростью. Когда мы подводим к пильному полотну доску и начинаем её резать, частота вращения диска заметно снижается. Соответственно, снижается и скорость вращения ротора относительно электромагнитного поля, что приводит к наведению еще большей ЭДС. Это увеличивает потребляемый ток и рабочая мощность мотора увеличивается до максимальной.
Принцип работы электрического мотора
Важно подбирать двигатель подходящей мощности – слишком низкая приведет к повреждению короткозамкнутого ротора из-за превышения расчетного максимума ЭДС, а слишком высокая приводит к необоснованным энергозатратам.
Асинхронные двигатели переменного тока рассчитаны на работу от трехфазной электрической сети, однако могут быть подключены и в однофазную сеть. Так, например, они используются в стиральных машинах и станках для домашних мастерских. Однофазный двигатель имеет примерно на 30% более низкую мощность, по сравнению с трехфазным – от 5 до 10 кВт.
Ввиду простоты исполнения и надежности асинхронные двигатели переменного тока наиболее распространены не только в производственном оборудовании, но и в бытовой технике.
Универсальные коллекторные двигатели
Во многих бытовых электроприборах необходимо наличие высокой скорости вращения двигателя и крутящего момента при малых пусковых токах и плавной регулировке. Всем этим требования удовлетворяют коллекторные двигатели, называемые универсальными. По своему устройству они очень похожи на двигатели постоянного тока с последовательным возбуждением.
Главным отличием от ДПТ является магнитная система, комплектуемая несколькими изолированными друг от друга листами электротехнической стали, к полюсам которых подсоединены по две секции обмотки. Такая конструкция снижает нагрев элементов токами Фуко и перемагничивание.
Высокая синхронность магнитных полей в универсальных коллекторных двигателях сохраняет высокую скорость вращения даже под большой нагрузкой на вал. Поэтому их используют в маломощном быстроходном оборудовании и домашней технике. При подключении в цепь регулируемого трансформатора появляется возможность плавной настройки частоты вращения.
Главный недостаток таких электромоторов заключается в низком моторесурсе, обусловленном быстрым стиранием графитовых щеток.
Асинхронный электродвигатель переменного тока
Электродвигатель предназначен для преобразования электрической энергии в механическую энергию. Это – одно из самых важных электротехнических устройств, без которого немыслима жизнь современного человечества.
Электродвигатель постоянного тока: принцип работы
Если проводник с током поместить в магнитное поле, то он придет в движение. Это продемонстрировал в 1821 году Майкл Фарадей, потом этот принцип был положен в основу работы электродвигателя.
Если поместить рамку с током в поле постоянного магнита, то на нее будет действовать сила, поворачивая вокруг оси вращения. Движение будет осуществляться до тех пор, пока система не придет в равновесие. В этот момент нужно изменить полярность тока в рамке, и движение продолжится. Постоянно меняя полярность тока в рамке, можно получить ее непрерывное вращение. Для этого ток в нее подается через контактные пластины на валу, называемые коллектором, соединенный с источником питания через подпружиненные щетки. При вращении пластины коллектора получают питание то от положительного полюса источника, то от отрицательного.
Коллекторы современных двигателей постоянного тока имеют большое число выводов (ламелей), что позволяет им работать устойчивее и достигать больших скоростей вращения. Питание к ним подводится через графитовые или медно-графитовые щетки.
Якорь с коллекторомПостоянные магниты, в силу непостоянства их магнитного потока, заменяют электромагнитами, обмотки которых располагают в неподвижной части двигателя, называемой статором. Вращающуюся же часть электродвигателя с обмоткой постоянного тока называют якорем.
Статор и якорь имеют сердечники для усиления электромагнитных свойств. Их изготавливают наборными из тонких металлических пластин, изолированных друг от друга специальным термостойким лаком. Это снижает потери на вихревые токи, нагревающие сердечники и снижающие коэффициент полезного действия двигателя. Сердечники имеют сложную форму. В них сделаны пазы, в которые укладываются обмотки.
Принцип работы асинхронного электродвигателя переменного тока
Переменный ток для электродвигателей удобен тем, что можно отказаться от коллекторных схем, изменяющих фазу тока в обмотке на валу двигателя, называемой уже не якорем, а ротором. На переменном токе она сама изменяется по синусоидальному закону. Но есть и сложность: магнитное поле статора тоже изменяется по синусоидальному закону. Поэтому обмотки статора разных фаз разделяется на несколько частей и располагаются в пространстве в определенном порядке.
Принцип работы двигателя переменного тока немного отличается от постоянного. Вращающееся по кругу магнитное поле статора создает магнитный поток, за счет которого в обмотке ротора создается ЭДС. Проводники обмотки замкнуты накоротко, поэтому по ним течет ток. Взаимодействие вращающегося магнитного поля статора с током в короткозамкнутом роторе приводит к его вращению.
При этом скорость, с которой вращается ротор меньше скорости вращения магнитного поля в статоре. Поэтому эти двигатели и называют асинхронными.
Асинхронный электродвигатель с короткозамкнутым роторомЕсли обмотки ротора выполнить не короткозамкнутыми, а вывести их концы на контактные кольца, то получится электродвигатель с фазным ротором. Включая в цепь ротора резисторы, можно регулировать скорость вращения. Это позволяет применять такие двигатели на кранах и экскаваторах. Все мощные асинхронные электродвигатели тоже имеют фазный ротор. Плавное или ступенчатое изменение величины сопротивления в цепи ротора во время пуска позволяет снизить пусковые токи и плавно разгонять приводимый во вращение агрегат.
Фазный ротор асинхронного электродвигателяПринцип действия синхронного электродвигателя переменного тока
Как видно из названия, ротор этого электродвигателя вращается с той же скоростью, что и магнитное поле статора, подключенного к сети переменного тока. В ротор же через контактные кольца и щетки подается постоянный ток, называемый током возбуждения. Регулируя величину тока в роторе, можно менять режим работы электродвигателя.
При определенных параметрах возбуждения получается режим, когда синхронный двигатель начинает отдавать в сеть реактивную мощность. Это – полезное свойство, позволяющее отказаться от применения установок компенсации реактивной мощности на предприятиях, где работают такие двигатели.
Однофазные электродвигатели переменного тока
Самая распространенная конструкция однофазного электродвигателя включает в себя обмотку на статоре и последовательно соединенную с ней обмотку якоря. Соединение происходит через щетки и коллектор якоря с большим количеством ламелей. Обмотки расположены так, что при взаимодействии подключенной в данный момент к цепи обмотки якоря с магнитным полем статора создается вращающий момент. Якорь поворачивается, и подключенной оказывается следующая обмотка. За счет этого момент вращения всегда остается постоянным.
Другая конструкция использует ротор с короткозамкнутыми обмотками и две обмотки на статоре. Одна из них включается через конденсатор, создающий при работе электродвигателя сдвиг фаз между токами и напряжениями в обмотках. Получается некоторое подобие асинхронного электродвигателя, но работающего не на трех, а на двух «фазах».
Оцените качество статьи:
какие они бывают / Блог компании НПФ ВЕКТОР / Хабр
В прошлых статьях был рассмотрен принцип работы синхронного и асинхронного электродвигателей, а также рассказано, как ими управлять. Но видов электродвигателей существует гораздо больше! И у каждого из них свои свойства, область применения и особенности.
В этой статье будет небольшой обзор по разным типам электродвигателей с фотографиями и примерами применений. Почему в пылесос ставятся одни двигатели, а в вентилятор вытяжки другие? Какие двигатели стоят в сегвее? А какие двигают поезд метро?
Каждый электродвигатель обладает некоторыми отличительными свойствами, которые обуславливают его область применения, в которой он наиболее выгоден. Синхронные, асинхронные, постоянного тока, коллекторные, бесколлекторные, вентильно-индукторные, шаговые… Почему бы, как в случае с двигателями внутреннего сгорания, не изобрести пару типов, довести их до совершенства и ставить их и только их во все применения? Давайте пройдемся по всем типам электродвигателей, а в конце обсудим, зачем же их столько и какой двигатель «самый лучший».
С этим двигателем все должны быть знакомы с детства, потому что именно этот тип двигателя стоит в большинстве старых игрушек. Батарейка, два проводка на контакты и звук знакомого жужжания, вдохновляющего на дальнейшие конструкторские подвиги. Все ведь так делали? Надеюсь. Иначе эта статья, скорее всего, не будет вам интересна. Внутри такого двигателя на валу установлен контактный узел – коллектор, переключающий обмотки на роторе в зависимости от положения ротора. Постоянный ток, подводимый к двигателю, протекает то по одним, то по другим частям обмотки, создавая вращающий момент. Кстати, не уходя далеко, всех ведь, наверное, интересовало – что за желтые штучки стояли на некоторых ДПТ из игрушек, прямо на контактах (как на фото сверху)? Это конденсаторы – при работе коллектора из-за коммутаций потребление тока импульсное, напряжение может также меняться скачками, из-за чего двигатель создает много помех. Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке. Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.
Двигатели постоянного тока бывают как очень маленького размера («вибра» в телефоне), так и довольно большого – обычно до мегаватта. Например, на фото ниже показан тяговый электродвигатель электровоза мощностью 810кВт и напряжением 1500В.
Почему ДПТ не делают мощнее? Главная проблема всех ДПТ, а в особенности ДПТ большой мощности – это коллекторный узел. Скользящий контакт сам по себе является не очень хорошей затеей, а скользящий контакт на киловольты и килоамперы – и подавно. Поэтому конструирование коллекторного узла для мощных ДПТ – целое искусство, а на мощности выше мегаватта сделать надежный коллектор становится слишком сложно (рекорд — 12,5МВт).
В потребительском качестве ДПТ хорош своей простотой с точки зрения управляемости. Его момент прямо пропорционален току якоря, а частота вращения (по крайней мере холостой ход) прямо пропорциональна приложенному напряжению. Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Также нужно упомянуть, как именно в ДПТ формируется магнитный поток возбуждения, с которым взаимодействует якорь (ротор) и за счет этого возникает вращающий момент. Этот поток может делаться двумя способами: постоянными магнитами и обмоткой возбуждения. В небольших двигателях чаще всего ставят постоянные магниты, в больших – обмотку возбуждения. Обмотка возбуждения – это еще один канал регулирования. При увеличении тока обмотки возбуждения увеличивается её магнитный поток. Этот магнитный поток входит как в формулу момента двигателя, так и в формулу ЭДС. Чем выше магнитный поток возбуждения, тем выше развиваемый момент при том же токе якоря. Но тем выше и ЭДС машины, а значит при том же самом напряжении питания частота вращения холостого хода двигателя будет ниже. Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.
Как ни странно, это самый распространенный в быту электродвигатель, название которого наименее известно. Почему так получилось? Его конструкция и характеристики такие же, как у двигателя постоянного тока, поэтому упоминание о нем в учебниках по приводу обычно помещается в самый конец главы про ДПТ. При этом ассоциация коллектор = ДПТ так прочно заседает в голове, что не всем приходит на ум, что двигатель постоянного тока, в названии которого присутствует «постоянный ток», теоретически можно включать в сеть переменного тока. Давайте разберемся.
Как изменить направление вращения двигателя постоянного тока? Это знают все, надо сменить полярность питания якоря. А ещё? А еще можно сменить полярность питания обмотки возбуждения, если возбуждение сделано обмоткой, а не магнитами. А если полярность сменить и у якоря, и у обмотки возбуждения? Правильно, направление вращения не изменится. Так что же мы ждем? Соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и там и там, после чего вставляем в однофазную сеть переменного тока! Готово, двигатель будет крутиться. Есть один только маленький штрих, который надо сделать: так как по обмотке возбуждения протекает переменный ток, её магнитопровод, в отличие от истинного ДПТ, надо изготовить шихтованным, чтобы снизить потери от вихревых токов. И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
Этот тип двигателей наиболее широко распространен в бытовой технике, где требуется регулировать частоту вращения: дрели, стиральные машины (не с «прямым приводом»), пылесосы и т.п. Почему именно он так популярен? Из-за простоты регулирования. Как и в ДПТ, его можно регулировать уровнем напряжения, что для сети переменного тока делается симистором (двунаправленным тиристором). Схема регулирования может быть так проста, что помещается, например, прямо в «курке» электроинструмента и не требует ни микроконтроллера, ни ШИМ, ни датчика положения ротора.
Еще более распространенным, чем коллекторные двигатели, является асинхронный двигатель. Только распространен он в основном в промышленности – где присутствует трехфазная сеть. Про принцип его работы написана
отдельная статья. Если кратко, то его статор – это распределенная двухфазная или трехфазная (реже многофазная) обмотка. Она подключается к источнику переменного напряжения и создает вращающееся магнитное поле. Ротор можно представлять себе в виде медного или алюминиевого цилиндра, внутри которого находится железо магнитопровода. К ротору в явном виде напряжение не подводится, но оно индуцируется там за счет переменного поля статора (поэтому двигатель на английском языке называют индукционным). Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.
Почему асинхронный двигатель так популярен? У него нет скользящего контакта, как у коллекторного двигателя, а поэтому он более надежен и требует меньше обслуживания. Кроме того, такой двигатель может пускаться от сети переменного тока «прямым пуском» – его можно включить коммутатором «на сеть», в результате чего двигатель запустится (с большим пусковым током 5-7 крат, но допустимым). ДПТ относительно большой мощности так включать нельзя, от пускового тока погорит коллектор. Также асинхронные привода, в отличие от ДПТ, можно делать гораздо большей мощности – десятки мегаватт, тоже благодаря отсутствию коллектора. При этом асинхронный двигатель относительно прост и дешев.
Асинхронный двигатель применяется и в быту: в тех устройствах, где не нужно регулировать частоту вращения. Чаще всего это так называемые «конденсаторные» двигатели, или, что тоже самое, «однофазные» асинхронники. Хотя на самом деле с точки зрения электродвигателя правильнее говорить «двухфазные», просто одна фаза двигателя подключается в сеть напрямую, а вторая через конденсатор. Конденсатор делает фазовый сдвиг напряжения во второй обмотке, что позволяет создать вращающееся эллиптическое магнитное поле. Обычно такие двигатели применяются в вытяжных вентиляторах, холодильниках, небольших насосах и т.п.
Минус асинхронного двигателя по сравнению с ДПТ в том, что его сложно регулировать. Асинхронный электродвигатель – это двигатель переменного тока. Если асинхронному двигателю просто понизить напряжение, не понизив частоту, то он несколько снизит скорость, да. Но у него увеличится так называемое скольжение (отставание частоты вращения от частоты поля статора), увеличатся потери в роторе, из-за чего он может перегреться и сгореть. Можно представлять это себе как регулирование скорости движения легкового автомобиля исключительно сцеплением, подав полный газ и включив четвертую передачу. Чтобы правильно регулировать частоту вращения асинхронного двигателя нужно пропорционально регулировать и частоту, и напряжение. А лучше и вовсе организовать векторное управление, как более подробно было описано в прошлой статье. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.
Про принцип работы синхронного двигателя также
была отдельная статья. Синхронных приводов бывает несколько подвидов – с магнитами (PMSM) и без (с обмоткой возбуждения и контактными кольцами), с синусоидальной ЭДС или с трапецеидальной (бесколлекторные двигатели постоянного тока, BLDC). Сюда же можно отнести некоторые шаговые двигатели. До эры силовой полупроводниковой электроники уделом синхронных машин было применение в качестве генераторов (почти все генераторы всех электростанций – синхронные машины), а также в качестве мощных приводов для какой-либо серьезной нагрузки в промышленности.
Все эти машины выполнялись с контактными кольцами (можно увидеть на фото), о возбуждении от постоянных магнитов при таких мощностях речи, конечно же, не идет. При этом у синхронного двигателя, в отличие от асинхронного, большие проблемы с пуском. Если включить мощную синхронную машину напрямую на трехфазную сеть, то всё будет плохо. Так как машина синхронная, она должна вращаться строго с частотой сети. Но за время 1/50 секунды ротор, конечно же, разогнаться с нуля до частоты сети не успеет, а поэтому он будет просто дергаться туда-сюда, так как момент получится знакопеременный. Это называется «синхронный двигатель не вошел в синхронизм». Поэтому в реальных синхронных машинах применяют асинхронный пуск – делают внутри синхронной машины небольшую асинхронную пусковую обмотку и закорачивают обмотку возбуждения, имитируя «беличью клетку» асинхронника, чтобы разогнать машину до частоты, примерно равной частоте вращения поля, а уже после этого включается возбуждение постоянным током и машина втягивается в синхронизм.
И если у асинхронного двигателя регулировать частоту ротора без изменения частоты поля хоть как-то можно, то у синхронного двигателя нельзя никак. Он или крутится с частой поля, или выпадает из синхронизма и с отвратительными переходными процессами останавливается. Кроме того, у синхронного двигателя без магнитов есть контактные кольца – скользящий контакт, чтобы передавать энергию на обмотку возбуждения в роторе. С точки зрения сложности, это, конечно, не коллектор ДПТ, но всё равно лучше бы было без скользящего контакта. Именно поэтому в промышленности для нерегулируемой нагрузки применяют в основном менее капризные асинхронные привода.
Но все изменилось с появлением силовой полупроводниковой электроники и микроконтроллеров. Они позволили сформировать для синхронной машины любую нужную частоту поля, привязанную через датчик положения к ротору двигателя: организовать вентильный режим работы двигателя (автокоммутацию) или векторное управление. При этом характеристики привода целиком (синхронная машина + инвертор) получились такими, какими они получаются у двигателя постоянного тока: синхронные двигатели заиграли совсем другими красками. Поэтому начиная где-то с 2000 года начался «бум» синхронных двигателей с постоянными магнитами. Сначала они робко вылезали в вентиляторах кулеров как маленькие BLDC двигатели, потом добрались до авиамоделей, потом забрались в стиральные машины как прямой привод, в электротягу (сегвей, Тойота приус и т.п.), всё больше вытесняя классический в таких задачах коллекторный двигатель. Сегодня синхронные двигатели с постоянными магнитами захватывают всё больше применений и идут семимильными шагами. И все это – благодаря электронике. Но чем же лучше синхронный двигатель асинхронного, если сравнивать комплект преобразователь+двигатель? И чем хуже? Этот вопрос будет рассматриваться в конце статьи, а сейчас давайте пройдемся еще по нескольким типам электродвигателей.
У него много названий. Обычно его коротко называют вентильно-индукторный двигатель (ВИД) или вентильно-индукторная машина (ВИМ) или привод (ВИП). В английской терминологии это switched reluctance drive (SRD) или motor (SRM), что переводится как машина с переключаемым магнитным сопротивлением. Но чуть ниже будет рассматриваться другой подвид этого двигателя, отличающийся по принципу действия. Чтобы не путать их друг с другом, «обычный» ВИД, который рассмотрен в этом разделе, мы на кафедре электропривода в МЭИ, а также на фирме ООО «НПФ ВЕКТОР» называем «вентильно-индукторный двигатель с самовозбуждением» или коротко ВИД СВ, что подчеркивает принцип возбуждения и отличает его от машины, рассмотренной далее. Но другие исследователи его также называют ВИД с самоподмагничиванием, иногда реактивный ВИД (что отражает суть образования вращающего момента).
Конструктивно это самый простой двигатель и по принципу действия похож на некоторые шаговые двигатели. Ротор – зубчатая железка. Статор – тоже зубчатый, но с другим числом зубцов. Проще всего принцип работы поясняет вот эта анимация:
Подавая постоянный ток в фазы в соответствии с текущим положением ротора можно заставить двигатель вращаться. Фаз может быть разное количество. Форма тока реального привода для трех фаз показа на рисунке (токоограничение 600А):
Однако за простоту двигателя приходится платить. Так как двигатель питается однополярными импульсами тока, напрямую «на сеть» его включать нельзя. Обязательно требуется преобразователь и датчик положения ротора. Причем преобразователь не классический (типа шестиключевой инвертор): для каждой фазы у преобразователя для SRD должны быть полумосты, как на фото в начале этого раздела. Проблема в том, что для удешевления комплектующих и улучшения компоновки преобразователей силовые ключи и диоды часто не изготавливаются отдельно: обычно применяются готовые модули, содержащие одновременно два ключа и два диода – так называемые стойки. И именно их чаще всего и приходится ставить в преобразователь для ВИД СВ, половину силовых ключей просто оставляя незадействованной: получается избыточный преобразователь. Хотя в последние годы некоторые производители IGBT модулей выпустили изделия, предназначенные именно для SRD.
Следующая проблема – это пульсации вращающего момента. В силу зубчатой структуры и импульсного тока момент редко получается стабильным – чаще всего он пульсирует. Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Однако даже при этих недостатках двигатели остаются перспективными в качестве регулируемого привода. Благодаря их простоте сам двигатель получается дешевле классического асинхронного двигателя. Кроме того, двигатель легко сделать многофазным и многосекционным, разделив управление одним двигателем на несколько независимых преобразователей, которые работают параллельно. Это позволяет повысить надежность привода – отключение, скажем, одного из четырех преобразователей не приведет к остановке привода в целом – трое соседей будут какое-то время работать с небольшой перегрузкой. Для асинхронного двигателя такой фокус выполнить так просто не получается, так как невозможно сделать несвязанные друг с другом фазы статора, которые бы управлялись отдельным преобразователем полностью независимо от других. Кроме того, ВИД очень хорошо регулируются «вверх» от основной частоты. Железку ротора можно раскручивать без проблем до очень высоких частот.
Мы на фирме ООО «НПФ ВЕКТОР» выполнили несколько проектов на базе этого двигателя. Например, делали небольшой привод для насосов горячего водоснабжения, а также недавно закончили разработку и отладку системы управления для мощных (1,6 МВт) многофазных резервируемых приводов для обогатительных фабрик АК «АЛРОСА». Вот машинка на 1,25 МВт:
Вся система управления, контроллеры и алгоритмы были сделаны у нас в ООО «НПФ ВЕКТОР», силовые преобразователи спроектировала и изготовила фирма ООО «НПП «ЦИКЛ+». Заказчиком работы и проектировщиком самих двигателей являлась фирма ООО «МИП «Мехатроника» ЮРГТУ (НПИ)».
Это совсем другой тип двигателя, отличающийся по принципу действия от обычного ВИД. Исторически известны и широко используются вентильно-индукторные генераторы такого типа, применяемые на самолетах, кораблях, железнодорожном транспорте, а вот именно двигателями такого типа почему-то занимаются мало.
На рисунке схематично показана геометрия ротора и магнитный поток обмотки возбуждения, а также изображено взаимодействие магнитных потоков статора и ротора, при этом ротор на рисунке установлен в согласованное положение (момент равен нулю).
Ротор собран из двух пакетов (из двух половинок), между которыми установлена обмотка возбуждения (на рисунке показана как четыре витка медного провода). Несмотря на то, что обмотка висит «посередине» между половинками ротора, крепится она к статору и не вращается. Ротор и статор выполнены из шихтованного железа, постоянные магниты отсутствуют. Обмотка статора распределенная трехфазная – как у обычного асинхронного или синхронного двигателя. Хотя существуют варианты такого типа машин с сосредоточенной обмоткой: зубцами на статоре, как у SRD или BLDC двигателя. Витки обмотки статора охватывают сразу оба пакета ротора.
Упрощенно принцип работы можно описать следующим образом: ротор стремится повернуться в такое положение, при котором направления магнитного потока в статоре (от токов статора) и роторе (от тока возбуждения) совпадут. При этом половина электромагнитного момента образуется в одном пакете, а половина – в другом. Со стороны статора машина подразумевает разнополярное синусоидальное питание (ЭДС синусоидальна), электромагнитный момент активный (полярность зависит от знака тока) и образован за счет взаимодействия поля, созданного током обмотки возбуждения с полем, созданного обмотками статора. По принципу работы эта машина отлична от классических шаговых и SRD двигателей, в которых момент реактивный (когда металлическая болванка притягивается к электромагниту и знак усилия не зависит от знака тока электромагнита).
С точки зрения управления ВИД НВ оказывается эквивалентен синхронной машине с контактными кольцами. То есть, если вы не знаете конструкцию этой машины и используете её как «черный ящик», то она ведет себя практически неотличимо от синхронной машины с обмоткой возбуждения. Можно сделать векторное управление или автокоммутацию, можно ослаблять поток возбуждения для повышения частоты вращения, можно усиливать его для создания большего момента – всё так, как будто это классическая синхронная машина с регулируемым возбуждением. Только ВИД НВ не имеет скользящего контакта. И не имеет магнитов. И ротор в виде дешевой железной болванки. И момент не пульсирует, в отличие от SRD. Вот, например, синусоидальные токи ВИД НВ при работе векторного управления:
Кроме того, ВИД НВ можно создавать многофазным и многосекционным, аналогично тому, как это делается в ВИД СВ. При этом фазы оказываются несвязанными друг с другом магнитными потоками и могут работать независимо. Т.е. получается как будто бы несколько трехфазных машин в одной, к каждой из которых присоединяется свой независимый инвертор с векторным управлением, а результирующая мощность просто суммируется. Координации между преобразователями при этом не требуется никакой – только общее задание частоты вращения.
Минусы этого двигателя тоже есть: напрямую от сети он крутиться не может, так как, в отличие от классических синхронных машин, ВИД НВ не имеет асинхронной пусковой обмотки на роторе. Кроме того, он сложнее по конструкции, чем обычный ВИД СВ (SRD).
На основе данного двигателя мы также сделали несколько успешных проектов. Например, один из них – это серия приводов насосов и вентиляторов для районных теплостанций г. Москвы мощностью 315-1200кВт (ссылка на проект). Это низковольтные (380В) ВИД НВ с резервированием, где одна машина «разбита» на 2, 4 или 6 независимых трехфазных секций. На каждую секцию ставится свой однотипный преобразователь с векторным бездатчиковым управлением. Таким образом можно легко наращивать мощность на базе однотипной конструкции преобразователя и двигателя. При этом часть преобразователей подключено к одному вводу питания районной теплостанции, а часть к другому. Поэтому если происходит «моргушка питания» по одному из вводов питания, то привод не встает: половина секций кратковременно работают в перегрузке, пока питание не восстановится. Как только оно восстанавливается, на ходу в работу автоматически вводятся отдыхавшие секции. Вообще, наверное, этот проект заслуживал бы отдельной статьи, поэтому пока про него закончу, вставив фото двигателя и преобразователей:
К сожалению, двумя словами здесь не обойтись. И общими выводами про то, что у каждого двигателя свои достоинства и недостатки – тоже. Потому что не рассмотрены самые главные качества – массогабаритные показатели каждого и типов машин, цена, а также их механические характеристики и перегрузочная способность. Оставим нерегулируемый асинхронный привод крутить свои насосы напрямую от сети, тут ему конкурентов нет. Оставим коллекторные машины крутить дрели и пылесосы, тут с ними в простоте регулирования тоже потягаться сложно.
Давайте рассмотрим регулируемый электропривод, режим работы которого – длительный. Коллекторные машины здесь сразу исключаются из конкуренции по причине ненадежности коллекторного узла. Но остались еще четыре – синхронный, асинхронный, и два типа вентильно-индукторных. Если мы говорим о приводе насоса, вентилятора и чего-то похожего, что используется в промышленности и где масса и габариты особо не важны, то здесь из конкуренции выпадают синхронные машины. Для обмотки возбуждения требуются контактные кольца, что является капризным элементом, а постоянные магниты очень дороги. Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Как показывает опыт, все три типа машин успешно применяются. Но – асинхронный привод невозможно (или очень сложно) секционировать, т.е. разбить мощную машину на несколько маломощных. Поэтому для обеспечения большой мощности асинхронного преобразователя требуется делать его высоковольтным: ведь мощность – это, если грубо, произведение напряжения на ток. Если для секционируемого привода мы можем взять низковольтный преобразователь и наставить их несколько, каждый на небольшой ток, то для асинхронного привода преобразователь должен быть один. Но не делать же преобразователь на 500В и ток 3 килоампера? Это провода нужны с руку толщиной. Поэтому для увеличения мощности повышают напряжение и снижают ток. А высоковольтный преобразователь – это совсем другой класс задачи. Нельзя просто так взять силовые ключи на 10кВ и сделать из них классический инвертор на 6 ключей, как раньше: и нет таких ключей, а если есть, они очень дороги. Инвертор делают многоуровневым, на низковольтных ключах, соединенных последовательно в сложных комбинациях. Такой инвертор иногда тянет за собой специализированный трансформатор, оптические каналы управления ключами, сложную распределенную систему управления, работающую как одно целое… В общем, сложно всё у мощного асинхронного привода. При этом вентильно-индукторный привод за счет секционирования может «отсрочить» переход на высоковольтный инвертор, позволяя сделать привода до единиц мегаватт от низковольтного питания, выполненные по классической схеме. В этом плане ВИПы становятся интереснее асинхронного привода, да еще и обеспечивают резервирование. С другой стороны, асинхронные привода работают уже сотни лет, двигатели доказали свою надежность. ВИПы же только пробивают себе дорогу. Так что здесь надо взвесить много факторов, чтобы выбрать для конкретной задачи наиболее оптимальный привод.
Но всё становится еще интереснее, когда речь заходит о транспорте или о малогабаритных устройствах. Там уже нельзя беспечно относиться к массе и габаритам электропривода. И вот там уже нужно смотреть на синхронные машины с постоянными магнитами. Если посмотреть только на параметр мощности деленной на массу (или размер), то синхронные машины с постоянными магнитами вне конкуренции. Отдельные экземпляры могут быть в разы меньше и легче, чем любой другой «безмагнитный» привод переменного тока. Но здесь есть одно опасное заблуждение, которое я сейчас постараюсь развеять.
Если синхронная машина в три раза меньше и легче – это не значит, что для электротяги она подходит лучше. Всё дело в отсутствии регулировки потока постоянных магнитов. Поток магнитов определяет ЭДС машины. На определенной частоте вращения ЭДС машины достигает напряжения питания инвертора и дальнейшее повышение частоты вращения становится затруднительно. Тоже самое касается и повышения момента. Если нужно реализовать больший момент, в синхронной машине нужно повышать ток статора – момент возрастет пропорционально. Но более эффективно было бы повысить и поток возбуждения – тогда и магнитное насыщение железа было бы более гармоничным, а потери были бы ниже. Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):
На рисунке по горизонтальной оси отложен момент двигателя, по вертикальной – частота вращения. Звездочкой отмечена точка номинального режима, например, пусть это будет 60кВт. Заштрихованный прямоугольник – это диапазон, где возможно регулирование синхронной машины без проблем – т.е. «вниз» по моменту и «вниз» по частоте от номинала. Красной линией отмечено, что можно выжать из синхронной машины сверх номинала – небольшое повышение частоты вращения за счет так называемого ослабления поля (на самом деле это создание лишнего реактивного тока по оси d двигателя в векторном управлении), а также показана некоторая возможная форсировка по моменту, чтобы было безопасно для магнитов. Всё. А теперь давайте поставим эту машину в легковое транспортное средство без коробки передач, где батарея рассчитана на отдачу 60кВт. Желаемая тяговая характеристика изображена синим. Т.е. начиная с самой низкой скорости, скажем, с 10км/ч привод должен развивать свои 60кВт и продолжать их развивать вплоть до максимальной скорости, скажем 150км/ч. Синхронная машина и близко не лежала: её момента не хватит даже чтобы заехать на бордюр у подъезда (или на поребрик у парадной, для полит. корректности), а разогнаться машина сможет лишь до 50-60км/ч.
Что же это значит? Синхронная машина не подходит для электротяги без коробки передач? Подходит, конечно же, просто надо по-другому её выбрать. Вот так:
Надо выбрать такую синхронную машину, чтобы требуемый тяговый диапазон регулирования был весь внутри её механической характеристики. Т.е. чтобы машина одновременно могла развить и большой момент, и работать на большой частоте вращения. Как вы видите из рисунка… установленная мощность такой машины будет уже не 60кВт, а 540кВт (можно посчитать по делениям). Т.е. в электромобиль с батареей на 60кВт придется установить синхронную машину и инвертор на 540кВт, просто чтобы «пройти» по требуемому моменту и частоте вращения.
Конечно же, так как описано, никто не делает. Никто не ставит машину на 540кВт вместо 60кВт. Синхронную машину модернизируют, пытаясь «размазать» её механическую характеристику из оптимума в одной точке вверх по скорости и вниз по моменту. Например, прячут магниты в железо ротора (делают инкорпорированными), это позволяет не бояться размагнитить магниты и ослаблять поле смелее, а также перегружать по току побольше. Но от таких модификаций синхронная машина набирает вес, габариты и становится уже не такой легкой и красивой, какой она была раньше. Появляются новые проблемы, такие как «что делать, если в режиме ослабления поля инвертор отключился». ЭДС машины может «накачать» звено постоянного тока инвертора и выжечь всё. Или что делать, если инвертор на ходу пробился — синхронная машина замкнется и может токами короткого замыкания убить и себя, и водителя, и всю оставшуюся живой электронику — нужны схемы защиты и т.п.
Поэтому синхронная машина хороша там, где большого диапазона регулирования не требуется. Например, в сегвее, где скорость с точки зрения безопасности может быть ограничена на 30км/ч (или сколько там у него?). А еще синхронная машина идеальна для вентиляторов: у вентилятора сравнительно мало изменяется частота вращения, от силы раза в два – больше особо нет смысла, так как воздушный поток ослабевает пропорционально квадрату скорости (примерно). Поэтому для небольших пропеллеров и вентиляторов синхронная машина – это то, что нужно. И как раз она туда, собственно, успешно ставится.
Тяговую кривую, изображенную на рисунке синим цветом, испокон веков реализуют двигатели постоянного тока с регулируемым возбуждением: когда ток обмотки возбуждения изменяют в зависимости от тока статора и частоты вращения. При увеличении частоты вращения уменьшается и ток возбуждения, позволяя машине разгоняться выше и выше. Поэтому ДПТ с независимым (или смешанным) управлением возбуждением классически стоял и до сих пор стоит в большинстве тяговых применений (метро, трамваи и т.п.). Какая же электрическая машина переменного тока может с ним поспорить?
К такой характеристике (постоянства мощности) могут лучше приблизиться двигатели, у которых регулируется возбуждение. Это асинхронный двигатель и оба типа ВИПов. Но у асинхронного двигателя есть две проблемы: во-первых, его естественная механическая характеристика – это не кривая постоянства мощности. Потому что возбуждение асинхронного двигателя осуществляется через статор. А поэтому в зоне ослабления поля при постоянстве напряжения (когда на инверторе оно закончилось) подъем частоты в два раза приводит к падению тока возбуждения в два раза и моментоообразующего тока тоже в два раза. А так как момент на двигателе – это произведение тока на поток, то момент падает в 4 раза, а мощность, соответственно, в два. Вторая проблема – это потери в роторе при перегрузке с большим моментом. В асинхронном двигателе половина потерь выделяется в роторе, половина в статоре. Для уменьшения массогабаритных показателей на транспорте часто применяется жидкостное охлаждение. Но водяная рубашка эффективно охладит лишь статор, за счет явления теплопроводности. От вращающегося ротора тепло отвести значительно сложнее – путь отвода тепла через «теплопроводность» отрезан, ротор не касается статора (подшипники не в счет). Остается воздушное охлаждение путем перемешивая воздуха внутри пространства двигателя или излучение тепла ротором. Поэтому ротор асинхронного двигателя получается своеобразным «термосом» — единожды перегрузив его (сделав динамичный разгон на машине), требуется долгое время ждать остывания ротора. А ведь его температуру еще и не измерить… приходится только предсказывать по модели.
Здесь нужно отметить, как мастерски обе проблемы асинхронного двигателя обошли в Тесла в своей Model S. Проблему с отводом тепла из ротора они решили… заведя во вращающийся ротор жидкость (у них есть соответствующий патент, где вал ротора полый и он омывается внутри жидкостью, но достоверно я не знаю, применяют ли они это). А вторую проблему с резким уменьшением момента при ослаблении поля… они не решали. Они поставили двигатель с тяговой характеристикой, почти как у меня нарисована для «избыточного» синхронного двигателя на рисунке выше, только у них не 540кВт, а 300кВт. Зона ослабления поля в тесле очень маленькая, где-то два крата. Т.е. они поставили «избыточный» для легкового автомобиля двигатель, сделав вместо бюджетного седана по сути спорт-кар с огромной мощностью. Недостаток асинхронного двигателя обратили в достоинство. Но если бы они попытались сделать менее «производительный» седан, мощностью 100кВт или меньше, то асинхронный двигатель, скорее всего, был бы точно таким же (на 300кВт), просто его искусственно задушили электроникой бы под возможности батареи.
А теперь ВИПы. Что могут они? Какая тяговая характеристика у них? Про ВИД СВ я точно сказать не могу – это по своему принципу работы нелинейный двигатель, и от проекта к проекту его механическая характеристика может сильно меняться. Но в целом он скорее всего лучше асинхронного двигателя в плане приближения к желаемой тяговой характеристике с постоянством мощности. А вот про ВИД НВ я могу сказать подробнее, так как мы на фирме им очень плотно занимаемся. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую мы по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
Так что же? ВИД НВ – идеальная машина для тяги без единой проблемы? На самом деле нет. Проблем у него тоже куча. Например, его обмотка возбуждения, которая «висит» между пакетами статора. Хоть она и не вращается, от неё тоже сложно отводить тепло – получается ситуация почти как ротором асинхронника, лишь немного получше. Можно, в случае надобности, «кинуть» трубку охлаждения со статора. Вторая проблема – это завышенные массогабаритные показатели. Глядя на рисунок ротора ВИД НВ, можно видеть, что пространство внутри двигателя используется не очень эффективно – «работают» только начало и конец ротора, а середина занята обмоткой возбуждения. В асинхронном двигателе, например, вся длина ротора, всё железо «работает». Сложность сборки – засунуть обмотку возбуждения внутрь пакетов ротора надо еще суметь (ротор делается разборным, соответственно, есть проблемы с балансировкой). Ну и просто массогабаритные характеристики пока получаются не очень-то выдающимися по сравнению с теми же асинхронными двигателями Тесла, если накладывать тяговые характеристики друг на друга.
А также есть еще общая проблема обоих типов ВИД. Их ротор – пароходное колесо. И на высоких частотах вращения (а высокая частота нужна, так высокочастотные машины при той же мощности меньше тихоходных) потери от перемешивания воздуха внутри становятся очень значительными. Если до 5000-7000 об/мин ВИД еще можно сделать, то на 20000 об/мин это получится большой миксер. А вот асинхронный двигатель на такие частоты и гораздо выше сделать вполне можно за счет гладкого статора.
Так что же лучше всего в итоге для электротяги? Какой двигатель самый лучший?
Понятия не имею. Все плохие. Надо изобретать дальше. Но мораль статьи такова – если вы хотите сравнить между собой разные типы регулируемого электропривода, то нужно сравнивать на конкретной задаче с конкретной требуемой механической характеристикой по всем-всем параметрам, а не просто по мощности. Также в этой статье не рассмотрены еще куча нюансов сравнения. Например, такой параметр как длительность работы в каждой из точек механической характеристики. На максимальном моменте обычно ни одна машина не может работать долго – это режим перегрузки, а на максимальной скорости очень плохо себя чувствуют синхронные машины с магнитами – там у них огромные потери в стали. А еще интересный параметр для электротяги – потери при движении выбегом, когда водитель отпустил газ. Если ВИПы и асинхронные двигатели будут крутиться как болванки, то у синхронной машины с постоянными магнитами останутся почти номинальные потери в стали из-за магнитов. И так далее, и так далее…
Поэтому нельзя вот так просто взять и выбрать лучший электропривод.
UPD:
Обобщая замечания в комментариях, необходимо дополнить некоторые важные, как оказалось, вещи, которые я изначально опустил как маловажные.
1. Асинхронные двигатели до эры преобразователей частоты регулировали за счет применения так называемого фазного ротора — когда ротор делался в виде обмотки, а не беличьей клетки, а через контактные кольца (как у синхронной машины) фазы ротора выводились наружу. Включая в цепь ротора резисторы можно было мягко пускать АД и безопасно регулировать частоту вращения, изменяя сопротивление. Проблема в том, что очень много энергии при этом терялось в резисторах — иногда до половины от подводимой к приводу мощности.
2. В статье не упомянуты синхронные реактивные машины и их совмещение с синхронными машинами с постоянными магнитами. Если сделать ротор синхронной машины с магнитами явнополюсным — например таким, как нарисован ротор SRD двигателя на gif анимации, то развиваемый момент может быть не только активным, но и реактивным — как у SRD. Подбирая оптимальное сочетание активного и реактивного момента можно частично исключить проблемы классической синхронной машины с магнитами, значительно расширив диапазон работы с постоянством мощности. Получается некий гибрид реактивной машины и синхронной с магнитами.
3. Шаговые двигатели не рассмотрены, потому что по принципу действия они в первом приближении схожи либо с синхронными машинами с постоянными магнитами, либо с SRD двигателями — зависит от конкретного типа шаговика. Только шаговые двигатели, в отличие от «силовых» приводов, имеют гораздо большее количество пар полюсов (зубцов) для увеличения коэффициента электрической редукции: чтобы одному периоду тока соответствовало меньшее угловое перемещение вала. Управление шаговиками обычно тривиальное — последовательный перебор фаз друг за другом (шаги). Более продвинутые системы дробят шаг, подавая в двигатель «микрошаги» — по сути приближая управление к синусоидальному. Еще более продвинутые используют датчик положения ротора и применяют полноценное векторное управление. Но в таком случае и машину нужно делать более качественную, а называться в сумме это будет уже настоящим сервоприводом.
Устройство и принцип работы электродвигателя переменного тока
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов. В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы.
В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской.
Как работает электродвигатель
Двигатель работает на основе эффекта, обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положения, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
В быту же постоянные магниты используются в детских игрушках на батарейках.
В других же более мощных двигателях используются только электромагниты или обмотки. Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания:
- Переменного тока, работающие напрямую от электросети.
- Постоянного тока, которые работают от батареек, АКБ, блоков питания или других источников постоянного тока.
По принципу работы:
- Синхронные, в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
- Асинхронные, самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре .
Принцип работы и устройство асинхронного электродвигателя
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.
Ротор, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым.
Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе. Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.
Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром.
Например, как работает циркулярная пила. Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС. Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы и устройство синхронного электродвигателя переменного тока
Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
Наиболее частыми поломками коллекторных двигателей является:
- Износ щеток или их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора. Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
Регулировка скорости вращения меняется методом изменения величины подаваемого напряжения. В дрелях и пылесосах для этого используется реостат или переменное сопротивление.
Изменение направления вращения происходит также как и у двигателей постоянного тока, о которых Я расскажу в следующей статье.
Самое главное о синхронных двигателях Я постарался изложить, более подробно Вы можете прочитать на них на Википедии.
Режимы работы электродвигателя в следующей статье.
SEC.gov | Превышен порог скорости запросов
Чтобы обеспечить равный доступ для всех пользователей, SEC оставляет за собой право ограничивать запросы, исходящие от необъявленных автоматизированных инструментов. Ваш запрос был идентифицирован как часть сети автоматизированных инструментов за пределами допустимой политики и будет обрабатываться до тех пор, пока не будут приняты меры по объявлению вашего трафика.
Укажите свой трафик, обновив свой пользовательский агент, включив в него информацию о компании.
Для лучших практик по эффективной загрузке информации из SEC.gov, включая последние документы EDGAR, посетите sec.gov/developer. Вы также можете подписаться на рассылку обновлений по электронной почте о программе открытых данных SEC, включая передовые методы, которые делают загрузку данных более эффективной, и улучшения SEC.gov, которые могут повлиять на процессы загрузки по сценарию. Для получения дополнительной информации обращайтесь по адресу [email protected].
Для получения дополнительной информации см. Политику конфиденциальности и безопасности веб-сайта SEC. Благодарим вас за интерес к Комиссии по ценным бумагам и биржам США.
Идентификатор ссылки: 0.7ecef50.1623925717.2e744694
Дополнительная информация
Политика безопасности в Интернете
Используя этот сайт, вы соглашаетесь на мониторинг и аудит безопасности. В целях безопасности и обеспечения того, чтобы общедоступная услуга оставалась доступной для пользователей, эта правительственная компьютерная система использует программы для мониторинга сетевого трафика для выявления несанкционированных попыток загрузки или изменения информации или иного причинения ущерба, включая попытки отказать пользователям в обслуживании.
Несанкционированные попытки загрузить информацию и / или изменить информацию в любой части этого сайта строго запрещены и подлежат судебному преследованию в соответствии с Законом о компьютерном мошенничестве и злоупотреблениях 1986 года и Законом о защите национальной информационной инфраструктуры 1996 года (см. Раздел 18 U.S.C. §§ 1001 и 1030).
Чтобы обеспечить хорошую работу нашего веб-сайта для всех пользователей, SEC отслеживает частоту запросов на контент SEC.gov, чтобы гарантировать, что автоматический поиск не влияет на возможность доступа других лиц к контенту SEC.gov. Мы оставляем за собой право блокировать IP-адреса, которые отправляют чрезмерное количество запросов. Текущие правила ограничивают пользователей до 10 запросов в секунду, независимо от количества машин, используемых для отправки запросов.
Если пользователь или приложение отправляет более 10 запросов в секунду, дальнейшие запросы с IP-адреса (-ов) могут быть ограничены на короткий период.Как только количество запросов упадет ниже порогового значения на 10 минут, пользователь может возобновить доступ к контенту на SEC.gov. Эта практика SEC предназначена для ограничения чрезмерного автоматического поиска на SEC.gov и не предназначена и не ожидается, чтобы повлиять на людей, просматривающих веб-сайт SEC.gov.
Обратите внимание, что эта политика может измениться, поскольку SEC управляет SEC.gov, чтобы гарантировать, что веб-сайт работает эффективно и остается доступным для всех пользователей.
Примечание: Мы не предлагаем техническую поддержку для разработки или отладки процессов загрузки по сценарию.
точек торможения | ДВИГАТЕЛЬ
Можете ли вы назвать две вещи, которые могут испортить работу тормозов и, возможно, вызвать неприятное и невыгодное возвращение? На самом деле это не викторина, поэтому вот ответы в произвольном порядке: пульсация педали и шум тормозов. Неудивительно, что этих проблем почти полностью можно избежать, если использовать надлежащие методы и инструменты для обслуживания тормозов. Мы собираемся проверить их для вас, но прежде мы определим некоторые условия обслуживания тормозов.
Изменение толщины ротора (RTV) нового ротора должно быть практически необнаружимым. Чтобы измерить RTV, отметьте ротор как минимум на дюжине равных интервалов. Через эти интервалы измеряйте и записывайте толщину ротора. Разница между показаниями нового (или с измененным покрытием) ротора не должна превышать 0,001 дюйма.
Боковое биение измеряется циферблатным индикатором, установленным на шпинделе или прилегающей зоне. Стрелка циферблатного индикатора находится посередине поверхности ротора.Удерживайте ротор на месте минимум тремя гайками, затянутыми в соответствии со спецификациями. При вращении ротора биение не должно превышать 0,002 дюйма.
Маркировка шпильки и ротора перед снятием ротора называется индексацией ротора. Это позволяет вернуть ротор в исходное положение после шлифовки. Этот небольшой шаг может избавить вас от многих головных болей, потому что производитель транспортного средства мог установить ротор, чтобы минимизировать биение. При установке нового ротора индексация невозможна.Боковое биение, вызванное несоответствием между ротором и ступицей, можно минимизировать, установив специальные прокладки между этими двумя частями.
Наждачную бумагу или электроинструмент можно использовать для нанесения ненаправленной отделки на поверхность трения ротора. Несмотря на то, что ведутся споры о необходимости шлифовать роторы во время каждого обслуживания тормозов, все производители автомобилей рекомендуют наносить ненаправленное вихревое покрытие на все роторы, как новые, так и переточенные. Такой прием финишной обработки помогает правильно ломать трущиеся и роторные поверхности.
Пульсация педали
Чтобы предотвратить пульсацию педали, если вы планируете повторно использовать ротор, проиндексируйте его, прежде чем снимать. Возврат ротора в исходное положение обеспечивает минимальное биение. Обработайте ротор на токарном станке с тормозами или на токарном станке, а затем обработайте ненаправленным покрытием. В следующем разделе мы подробно рассмотрим шлифовку ротора.
Завершите процесс шлифовки, промыв его горячей водой с мылом, а затем тщательно просушив бумажными полотенцами.Не следует использовать очиститель тормозов, поскольку он не удаляет все металлические частицы с ротора. Также следует избегать производственного воздуха и ветоши, поскольку они обычно содержат масло, которое может загрязнять поверхности ротора и фрикционный материал.
Перед повторной установкой ротора очистите ступицу и шляпку ротора, чтобы удалить все следы ржавчины и коррозии с внутреннего ротора и поверхности ступицы, на которой вращается ротор. Проволочное колесо на дрели недостаточно эффективно очищает шпильки колеса.Для этой цели доступны специальные инструменты, в том числе подушечки ScotchBrite, которые устанавливаются вокруг шпилек.
Проверить люфт подшипника ступицы. Подшипники ступицы переднего привода должны иметь осевой люфт не более 0,002 дюйма; более чем это приведет в конечном итоге к RTV. Если установленное биение больше, чем указано в спецификации, попробуйте индексировать ротор по одному выступу за раз, чтобы увидеть, можно ли это исправить. Для этого также можно использовать специальную систему прокладок. В крайнем случае, обработайте ротор на автомобильном тормозном станке.Это приведет к согласованию ротора со ступицей и, если все сделано правильно, снизит биение до нуля.
Если ротор установлен с превышением допустимых значений биения, это может не сразу ощущаться как пульсация педали тормоза. Однако со временем верхняя точка ротора соприкасается с фрикционным материалом при каждом прохождении. Это может привести к осаждению фрикционного материала на роторе, что сделает точку еще выше. Когда он становится достаточно высоким, возникает пульсация педали. Может пройти несколько тысяч миль, прежде чем пульсация станет заметной для водителя.
Следуйте надлежащей процедуре затяжки гайки, чтобы избежать биения при установке колес. Все производители автомобилей не рекомендуют смазывать шпильки, так как это приведет к ложным показаниям крутящего момента. Затяните вручную все проушины по схеме «звезда», затем затяните до половины максимального указанного значения крутящего момента. Затяните с полным крутящим моментом, указанным производителем транспортного средства. После всей вашей тяжелой работы может возникнуть боковое биение, если использовать ударный гаечный ключ для затягивания гаек.В конечном итоге это приведет к RTV и пульсации педали.
Шум тормозов
Шум тормозов — отрава каждого техника. После остановки тормоза автомобиль может остановиться прямо и точно с нулевой пульсацией педали. Но если клиент слышит визг тормозов или зловещие щелчки и лязг доносятся из-под автомобиля, вы можете держать пари, что он вернется, чтобы согнуть вам ухо. Чтобы избежать шума тормозов, используйте следующие методы.
Осмотрите оборудование дискового тормоза.Болты суппорта, втулки, втулки и зажимы должны быть новыми или в новом состоянии. Болты суппорта не должны изгибаться и должны быть затянуты в соответствии со спецификациями производителя. Направляющие и втулки суппорта должны быть чистыми и смазанными рекомендованной смазкой для суппортов и в соответствии с рекомендованной процедурой смазки суппорта. У всех производителей есть особые процедуры смазки, предназначенные для предотвращения шума, вызванного вибрацией.
Зажимы, удерживающие колодки на месте в анкерном кронштейне, следует заменять при каждой тормозной работе.Также проверьте анкерные кронштейны на износ — они действительно изнашиваются. Новые колодки должны плотно прилегать к анкерному кронштейну; максимальный зазор составляет всего 0,010 дюйма. Большая часть визга тормозов вызвана неплотной посадкой колодок в анкерном кронштейне.
Не каждый ротор нужно вращать во время работы тормоза. Новые роторы и барабаны должны быть готовы к использованию сразу после покупки. Если они нуждаются в ремонте, они либо были повреждены при обращении, либо хранились ненадлежащим образом, либо были получены от сомнительного поставщика. Обработка новых роторов сокращает расходы на клиента, поскольку удаление металла из легкого ротора сокращает срок его службы.
Современные роторы заметно легче, чем роторы прошлого. Они тоньше, поэтому меньше металла можно удалить механической обработкой. Кроме того, из-за меньшей массы современные роторы менее способны переносить нежелательное тепло и выделять его. Современные тормозные колодки не заботятся о том, с какими поверхностями ротора они будут работать. Это произошло из-за изменений, которые были необходимы, чтобы заставить их работать с более легкими (более горячими) роторами, работать без определенных веществ (например, асбест) и обеспечивать отличные тормозные характеристики.
Многие бывшие в употреблении роторы также не нуждаются в повороте. Фактически, желательны необработанные бывшие в употреблении роторы в хорошем состоянии. Во время остановок часть фрикционного материала переходит от колодок к рабочим поверхностям ротора. Это часть обычного процесса обкатки и улучшает коэффициент трения ротора. Хорошие, бывшие в употреблении роторы уже прошли это кондиционирование. Это может быть особенно важно для некоторых транспортных средств, которые плохо останавливаются после того, как были установлены новые тормоза и не были обкатаны.На самом деле они будут лучше останавливаться во время периода обкатки с установленными подходящими парами исправных бывших в употреблении роторов, а не с новыми или замененными роторами.
Использованный ротор должен соответствовать трем стандартам, прежде чем его можно будет снова ввести в эксплуатацию без механической обработки: состояние поверхности, технические характеристики и правильность. Определение состояния поверхности начинается с визуального осмотра. Если вы видите шероховатость, обработка в порядке — при условии, что толщина ротора соответствует техническим характеристикам. Некоторые производители даже позволяют выставлять баллы до.060 дюймов (1,5 мм) шириной или глубиной. Простой тест GM показывает, что если край монетки не входит в канавку на поверхности, канавка недостаточно широкая, чтобы создавать проблемы. Если монета входит в канавку, но вы все еще можете видеть все волосы FDR, царапина недостаточно глубокая, чтобы о ней беспокоиться.
Если вы совершили пробную поездку на автомобиле перед началом работы, вы можете догадаться, подходят ли роторы для повторного использования. Если педаль работает нормально, есть вероятность, что изменение толщины ротора может соответствовать допустимому в таблице спецификаций (обычно около.002 дюйма или 0,050 мм). Установив ротор, снимите показания толщины в восьми-десяти точках по его окружности для проверки. Конечно, если какие-либо из них соответствуют или ниже спецификации «выбросить», утилизируйте ротор.
Вы также часто обнаруживаете, что биение соответствует техническим характеристикам ротора, который хорошо обслуживается и не вызывает пульсацию педали тормоза. Убедитесь в этом по циферблатному индикатору. Помните, однако, что вы можете выбить бесшумный ротор до или после его затяжки, чтобы выполнить ваши проверки; если вы вообще его потревожите, убедитесь, что между сопрягаемыми поверхностями ступицы и ротора ничего нет и что они чистые.Если все в порядке, оставьте ротор в покое.
Если вы планируете повторно использовать ротор как есть, роторы должны быть как есть с обеих сторон, так и ни на одном из них. Если вы соедините хорошо подержанный ротор с новым или повторно обработанным на той же оси, более высокий коэффициент трения единственного ротора в исходном состоянии вызовет тянущее усилие в его направлении.
Когда измерения показывают, что необходима шлифовка ротора, все большее число производителей транспортных средств рекомендуют использовать автомобильный токарный станок для тормозов. Многие считают, что это единственный способ повернуть роторы и не допустить биения.Тем не менее, многие мастерские до сих пор используют обычные тормозные токарные станки для вращения роторов. Любой серьезный тормозной мастерской следует подумать о приобретении токарного станка для автомобиля. Во многих случаях это может быть единственный способ избежать трудоемких возвращений. Автомобильный токарный станок с тормозами не только снижает биение, но и экономит ваше время. Несущие винты, которые проходят проверку спецификаций, но нуждаются в шлифовке, снимать не нужно.
Хотя водитель может не заметить небольшого бокового биения ротора в педали тормоза, даже незначительное биение приведет к тому, что тормозные колодки в состоянии покоя будут периодически сталкиваться с проезжающими высокими точками с каждой стороны ротора, вызывая проблему биения.Со временем и километрами эти удары уменьшают количество точек соприкосновения. Затем во время остановок колодки и поршни суппорта сближаются, поскольку между ними проходят тонкие пятна. Когда толстые пятна проходят мимо, поршни снова попадают в отверстия, и водитель ощущает это как пульсацию педали тормоза.
Можно ожидать, что все, что препятствует правильности ротора, со временем приведет к изменению толщины ротора. Одна из частых причин — неправильный или неравномерный момент затяжки гайки наконечника. Биение также может произойти, если ротор, который был правильно отремонтирован, установлен на ступицу, имеющую небольшую проблему биения, или, возможно, что-то застряло между ротором и ступицей.Замена покрытия на автомобиле может компенсировать определенное биение ступицы. А поскольку снятие ротора не требуется, если ротор не заменяется, шлифовка на автомобиле может предотвратить попадание чего-либо между ротором и ступицей.
Экстремальные условия торможения могут вызвать продолжительные высокие температуры, которые могут вызвать перегрев поверхности ротора или барабана. Обесцвечивание (обычно синий) автоматически не является поводом для беспокойства. Некоторые производители рекомендуют не менять поверхность обесцвеченных роторов и барабанов, которые в остальном являются нормальными.Но не пытайтесь удалить с помощью шлифовки твердые пятна, которые, кажется, выступают над окружающей областью и имеют тускло-серый цвет без четко очерченных краев. Вы можете удалить их сейчас, но эти твердые участки снова появятся, вызывая пульсацию педали. Роторы или барабаны с твердыми пятнами следует выбросить.
Шлифовка поверхности на автомобиле по-прежнему должна соответствовать тем же стандартам, что и точение станка — гладкость остается очень важной. Если ваш автомобильный токарный станок не настроен для ненаправленной окончательной обработки, используйте орбитальную или двустороннюю шлифовальную машину с бумагой с зернистостью 180/220 в течение одной минуты на каждой поверхности ротора.Доступ к задней части ротора должен быть обеспечен через монтажную площадку суппорта.
Все производители теперь рекомендуют ненаправленную отделку роторов, и даже новые роторы следует обрабатывать таковой. Перед установкой роторы следует промыть горячей водой с мылом, поскольку очистители на основе растворителей не удаляют всю механическую пыль, а сушка сжатым воздухом обычно приводит к загрязнению фрикционного материала маслом. Также очень важно убедиться, что на фланце колеса за ротором нет ржавчины или мусора.Как упоминалось ранее, неспособность устранить ржавчину или мусор приведет к биению ротора, что со временем приведет к переносу фрикционного материала на поверхность ротора. В конечном итоге это вызовет шум из-за резкого изменения толщины ротора.
Современные тормозные колодки могут обеспечить отличную тормозную способность, но сочетание их с роторами, которые не являются гладкими, правильными и достаточно толстыми, испортит вашу работу. Ожидайте шума, быстрого износа, неустойчивой работы, пульсации педалей и возврата, если роторы неправильные.
После того, как вы закончили работу с тормозом, не портите его, перетягивая или недотягивая гайки. Неправильный момент затяжки зажимной гайки приведет к прогибу ротора. Со временем и после 2000–3000 миль поищите жалобы на изменение толщины ротора, шум и пульсацию педали тормоза. Отклонение ротора не проявится до тех пор, пока на транспортном средстве не накопится пробег, что заставит вас поверить в то, что шум не связан с первоначальной работой тормозов. Всегда используйте откалиброванный динамометрический ключ и проверяйте крутящий момент колеса, соответствующий автомобилю.
Все новые тормозные колодки должны быть должным образом обкатаны. Процедура позволяет нагреванию первых нескольких умеренных остановок постепенно затвердеть смолу колодок, поскольку их поверхности должным образом соприкасаются с роторами. Во время обкатки следует избегать аварийных остановок, так как из-за высокой температуры, которую они генерируют, смола для подушек выходит на поверхность и покрывает их глазурью.
Убедитесь, что у вас исправная педаль тормоза, осторожно нажав на педаль, чтобы переместить колесные цилиндры и поршни суппорта в их нормальное положение.Убедившись, что педаль исправна, выполните следующую процедуру во время тест-драйва. Выполните 30 остановок на скорости 30 миль в час с 30-секундным интервалом охлаждения между остановками (30/30/30), чтобы полировать новые колодки.
Эти остановки следует выполнять с замедлением не более 12 футов в секунду. Это означает плавную и легкую остановку. Процедура полировки 30/30/30 обеспечивает размещение подушек и башмаков в роторе и барабанах. Он также обеспечивает передачу необходимого трения на роторы и барабаны для оптимальной эффективности торможения.Следование этой процедуре также гарантирует, что ваш клиент будет иметь отличные тормозные характеристики с первого раза, когда он водит автомобиль, после того, как было выполнено обслуживание тормозов. Вы не должны полагаться на своего клиента, чтобы прервать работу тормозов. Единственный способ убедиться, что все сделано правильно, — это включить его в тест-драйв тормозной системы. Помните, что правильное полирование обеспечивает длительную бесшумную работу тормозов.
Наконец, уделите время тому, чтобы ознакомиться с надлежащей процедурой обслуживания автомобиля, над которым вы работаете.Прочтите все TSB для автомобиля. Импортные суппорты имеют небольшие размеры и подвержены вибрации. Производители опубликовали большое количество информации, объясняющей, как предотвратить шум и вибрацию этих автомобилей. Отечественные производители также внесли много изменений в процедуры обслуживания тормозов, касающиеся предотвращения шума.
Скачать PDF
Динамическое закрепление отдаленных источников аритмии фиброзными областями посредством реструктуризации паттерна активации
Динамическое закрепление дальнего ротора в 2D модели сердечной ткани
Фиброзные рубцы не только фиксируют роторы, но и могут динамически фиксировать их с большого расстояния.В первых экспериментах мы изучали динамику спиральной волны с фиброзным рубцом и без него в общем исследовании. Диаметр фиброзной области составлял 6,4 см, исходя из аналогичного размера рубцов у пациентов с задокументированной и индуцированной ЖТ (см. Раздел «Методы», Магнитно-резонансная томография). Процент фиброза изменялся линейно от 50% в центре рубца до 0% на границе рубца. Мы запустили ротор на расстоянии 15,5 см от рубца (рис. 1, панель A), который имел период 222 мс, и изучили его динамику.
Рис. 1. Динамическое закрепление удаленного ротора на фиброзной области в 2D-модели.
Невозбудимая фиброзная ткань показана оранжевым цветом, а трансмембранное напряжение показано оттенками серого.
Фибротический рубец:
A: Был запущен ротор на расстоянии 15,5 см от границы фиброзной области.
B: Волновой фронт начинает разрушаться на рубцовой области, образуя вторичные источники.
C-D: Вторичные источники начали распространяться к исходному ротору.
D: Вторичные источники тянутся к начальному ротору.
E: Один вторичный источник объединится с начальным ротором, см. Белый кружок.
F: Вторичный источник слился с исходным ротором, в левой части ткани ротора больше нет.
G: Главный ротор теперь обозначен белым кружком, процесс уничтожения ротора начинается снова.
H-I: Аннигиляция нового ротора снова приводит к тому, что доминирующий ротор находится ближе к рубцу.
J-K: Доминирующий ротор снова сливается с вторичным источником (белый кружок), что приводит к реструктуризации модели активации.
L: ротор теперь прикреплен к рубцу.
Без рубца
A: Слева от ткани был запущен ротор.
B-C: Эти роторы остаются стабильными в течение 20 секунд моделирования.
Некротический рубец A: Ротор был инициирован слева от ткани, или на расстоянии 15,5 см от границы некротического рубца.
B-C: Эти роторы остаются стабильными в течение 20 секунд моделирования.
https://doi.org/10.1371/journal.pcbi.1006637.g001
Во-первых, через несколько секунд паттерн активации стал менее регулярным, и в фиброзной области появилось несколько вторичных волновых разрывов (рис. 1, панель B). Эти неровности начали распространяться к кончику исходного ротора (рис. 1, панель C-D), создавая сложную картину активации между рубцом и исходным ротором.Затем один из вторичных источников достиг вершины исходного ротора (рис. 1, панель E). Затем этот вторичный источник слился с исходным ротором (рис. 1, панель F), что привело к замедлению картины активации и стимулировало цепную реакцию аннигиляции всех вторичных прерываний волны в окрестности исходного ротора. В этот момент при моделировании доминировал вторичный источник, расположенный ближе к рубцу (рис. 1, панель G). Теперь весь процесс начался снова (рис. 1, панели H-K), пока, наконец, только один источник не стал основным источником, прикрепленным к рубцу (рис. 1L) с периодом вращения 307 мс.Для наглядности фильм этого процесса представлен как дополнительный фильм S1.
Обратите внимание, что этот процесс происходит только при наличии рубца с окружающей фиброзной зоной. В моделировании, озаглавленной «Без рубца» на рис. 1, мы показываем контрольный эксперимент, когда для ткани без рубца использовались те же начальные условия. На панели, озаглавленной «Некротический рубец» на рис. 1, показано моделирование только компактной области без окружающей фиброзной ткани. В обоих случаях ротор был устойчивым и находился в исходном положении в течение всего периода моделирования.Важное отличие здесь от процессов, показанных на рис. 1 (фибротический рубец), заключается в том, что в случаях «нет рубца» и «некротического рубца» не происходит новых разломов волн, и, следовательно, у нас нет сложного динамического процесса перестройки возбуждения. узоры. Мы называем этот сложный динамический процесс, приводящий к закреплению удаленного ротора, динамическим закреплением. Хотя этот процесс содержит этап сложного поведения, в целом он чрезвычайно надежен и воспроизводим в очень широком диапазоне условий.Во второй серии моделирования исходный ротор был размещен на разных расстояниях от границы рубца, в диапазоне от 1,8 до 14,3 см, чтобы определить возможные результаты, см. Рис. 2. Здесь, в дополнение к одному закрепленному ротору, показанному на рис. 1H. мы также могли получить другие конечные результаты динамического закрепления: мы получили роторы, вращающиеся в противоположном направлении (рис. 2A, вверху), роторы с двойным якорем, у которых было 2 волновых фронта, вращающихся вокруг фиброзных областей (рис. 2A, в середине), или аннигиляция роторов. (Рис. 2A, внизу, где нет волны вокруг рубца), которое обычно возникает в результате аннигиляции повторяющегося рисунка в форме восьмерки.Подводя итог, мы получили следующие возможные результаты:
- Прекращение деятельности
- Ротор, вращающийся по часовой стрелке или против часовой стрелки
- Двух- или трехплечий ротор, вращающийся по или против часовой стрелки
Рис. 2.
Панель A: Типы результирующих паттернов активации: (1) ротор, вращающийся в направлении, противоположном исходному ротору, (2) двуплечий ротор и (3) прекращение активности. Панель B: Тип результирующего паттерна активации в зависимости от расстояния между ротором и границей рубца.Красный цвет указывает: результирующий образец активации представляет собой ротор, вращающийся либо в том же направлении, что и исходный ротор, либо в противоположном направлении. Зеленый цвет означает: результирующий образец активации представляет собой ротор с двумя или тремя лопастями. Синий указывает: электрическая активность исчезает после динамической перестройки паттерна активации.
https://doi.org/10.1371/journal.pcbi.1006637.g002
На рис. 2, панель B представлена относительная вероятность возникновения упомянутых паттернов активации в зависимости от расстояния между ротором и границей рубца.Мы действительно видим, что для меньших начальных расстояний результирующая картина активации всегда представляет собой один ротор, вращающийся в одном направлении. С увеличением расстояния возможны другие схемы крепления. Если расстояние было больше, чем примерно 9 см, есть как минимум 50% шанс получить либо многорукавный ротор, либо прекращение активности. Также отметим, что такое динамическое закрепление происходило с огромных расстояний: мы изучали роторы, расположенные на расстоянии до 14 см от рубца. Однако мы заметили, что даже на очень больших расстояниях, таких как 25 см или более, такое динамическое закрепление (или прекращение паттерна активации) всегда возможно, при условии, что было предоставлено достаточно времени.
Мы измерили время, необходимое для фиксации роторов, в зависимости от расстояния до рубца. Для каждого расстояния мы выполнили около 60 вычислений с использованием различных начальных значений генератора случайных чисел, как с учетом ионного ремоделирования, так и без него. Результаты этого моделирования показаны на рис. 3. Мы видим, что время, необходимое для динамического закрепления, линейно зависит от расстояния между границей рубца и начальным ротором. Синяя и желтая линии соответствуют модели рубца с ионным ремоделированием и без него, соответственно (ионное ремоделирование моделировалось уменьшением проводимости I Na , I Kr и I Ks , как объяснено в разделе «Методы»).Мы интерпретируем эти результаты следующим образом; Время закрепления в основном определяется распространением хаотического режима к сердцевине исходного ротора, и этот процесс имеет четкую линейную зависимость. Для удаленных роторов распространение этого хаотического режима в основном происходит за пределами области ионного ремоделирования, и, таким образом, обе кривые на рис. 3 имеют одинаковый наклон. Однако при ионном ремоделировании APD в области рубца продлевается. Это создает неоднородность и, как следствие, образуются примерно 3 начальных разрыва в области рубца.На 5 секунд раньше в модели рубца с ремоделированием по сравнению с моделью рубца без ремоделирования.
Рис. 3. Скрипичный график зависимости времени, необходимого для закрепления или остановки ротора, от начального расстояния между кончиком ротора и границей фиброзной области в 2D-модели.
Желтый цвет указывает на модель фиброза, в которой учитывается ионное ремоделирование, а синий указывает, что фиброз моделируется только путем введения небольших непреодолимых препятствий.
https: // doi.org / 10.1371 / journal.pcbi.1006637.g003
Чтобы определить некоторые свойства субстрата, необходимые для динамического закрепления, мы варьировали размер и уровень фиброза внутри рубца и исследовали, присутствует ли динамическое закрепление. Из-за стохастической природы схемы фиброза мы выполнили около 300 вычислений с различными текстурами фиброза для каждой данной комбинации размера рубца и уровня фиброза. Результаты этого эксперимента показаны на рис. 4. Динамическое закрепление не происходит, когда диаметр рубца был меньше 2.6 см, см. Рис. 4. Для шрамов такого маленького размера мы наблюдали отсутствие как разрыва, так и динамического закрепления. Мы объясняем это тем, что если начальное разделение разрывов волн, образовавшихся в рубце, невелико, два вторичных источника немедленно сливаются, восстанавливая форму волнового фронта и предотвращая образование вторичных источников [37].
Рис. 4. Фазовая диаграмма, показывающая область, где присутствует эффект закрепления, в двухпараметрическом пространстве: размер рубца и уровень фиброза.
Рубец имел равномерное распределение фиброза. Отметка «Притяжение» соответствует региону, где динамическая привязка была получена более чем в 65% случаев. «Нет притяжения» показывает регион, где эффект наблюдался менее чем в 65% случаев. Рубец располагался на расстоянии 5 см от рубца.
https://doi.org/10.1371/journal.pcbi.1006637.g004
Также мы видим, что для этого эффекта требуется средний уровень плотности фиброза. При небольших уровнях фиброза вторичные разрывы не образуются (близко к границе фиброзной ткани).Кроме того, не может образоваться разрывов, если уровень фиброза превышает 41% в нашей 2D-модели (то есть ближе к сердцевине), поскольку ткань ведет себя как невыносимый рубец. При фиброзе> 41% рубец фактически становится большим препятствием, которое не может разрушить волны исходного ротора [37]. Вблизи порога в 41% мы также наблюдали еще одну интересную картину, когда разрывы образуются только внутри сердцевины рубца (внутри области> 41%) и не могут выходить на окружающие ткани, см. Дополнительный фильм S1.
Наконец, обратите внимание, что рис. 4 иллюстрирует только несколько факторов, важных для динамического закрепления в простой настройке изотропной модели сердечной ткани. Конкретные значения уровня фиброза и размера рубца также могут зависеть от анизотропии, текстуры фиброза и его возможного неоднородного распределения.
Динамическое закрепление в модели левого желудочка для конкретного пациента
Чтобы убедиться, что динамическое закрепление происходит в более реалистичной геометрии, мы разработали и исследовали этот эффект на модели левого желудочка человека для конкретного пациента, подробности см. В разделе «Метод».Рубец в этом наборе данных имеет сложную геометрию с несколькими компактными областями размером около 5-7 см, в которых процент фиброза постепенно изменяется от 0% до 41% в центре рубца на основе данных изображений, см. Раздел «Методы». Ремоделирование ионных каналов во всей области рубца также было включено в модель (включая пограничную зону, как описано в модели фиброза в разделе, посвященном методам). Мы изучили явление динамического закрепления для 16 различных местоположений сердечников ротора, случайным образом распределенных в срезе сердца примерно в 4 см от верхушки (см. Рис. 5).
Рис. 5. Эффект динамического закрепления ротора для индивидуальной модели левого желудочка после нижнебокового ИМ.
Красный цвет соответствует высокому трансмембранному напряжению, розовый цвет показывает рубец. В верхнем ряду показан левый желудочек в модифицированном виде спереди (где была начата спираль), а во втором ряду — в модифицированном виде сзади (расположение рубца). A: Ротор запускается на расстоянии 5 см от области рубца. B: Форма расставаний, делающая паттерн активации менее регулярным (2.6 с после инициализации) C: ротор закрепляется на рубце и постоянно вращается вокруг него (3,7 с после инициализации). D: 16 различных мест начального сердечника ротора в срезе на расстоянии 4 см от вершины. В нижнем ряду модели показаны там, где нет рубца, а спиральный сердечник остается в том же месте. Чтобы увидеть фильм о моделировании шрама, см. Дополнительный фильм S2.
https://doi.org/10.1371/journal.pcbi.1006637.g005
Анизотропия сердца была создана с помощью подхода, основанного на правилах, подробно описанного в разделе «Методы» (Модель левого желудочка человека). Из 16 начальных местоположений, показанных на рис. 5, во всех случаях имело место динамическое прикрепление к фиброзной ткани, с ионным ремоделированием и без него. После постановки на якорь в 4 случаях ротор аннигилировал. Эффект притяжения был усилен электрофизиологическим ремоделированием, аналогичным 2D.
Типичный пример нашего 3D-моделирования показан на рис. 5.Мы следовали тому же протоколу, что и для 2D-моделирования. Верхние 2 ряда — измененный вид спереди и измененный вид сзади в случае наличия рубца. В столбце A мы видим исходное расположение спирального сердечника (5 см от рубца), обозначенное черной стрелкой на виде спереди. В столбце B образовались разрывы из-за рубцовой ткани, и начал появляться вторичный источник. Через 3,7 с спираль закрепляется вокруг рубца, обозначенного черной стрелкой на виде сзади, и постоянно вращается вокруг него.В нижнем ряду мы показываем ту же симуляцию, но без учета рубца. В этом случае спираль не меняет своего первоначального положения (только легкое движение, см. Черные стрелки).
Чтобы оценить, можно ли зарегистрировать этот эффект в клинической практике, мы вычислили ЭКГ для наших 3D-симуляций. ЭКГ, соответствующая примеру на рис. 5, показана на рис. 6. В течение первых трех секунд ЭКГ показывает комплексы QRS, различающиеся по амплитуде и форме, а затем более однородную морфологию QRS между ударами с большей амплитудой.Это изменение морфологии связано с закреплением ротора, которое происходит примерно через три секунды после начала моделирования. Первоначальная нерегулярность связана с наличием вторичных источников с немного большим периодом, чем у исходного ротора. После закрепления ротора картина становится относительно стабильной, что соответствует обычной морфологии ЭКГ с зубцами пилы. Дополнительные ЭКГ для случаев прекращения аритмии и фиксации показаны на дополнительном S2 Рис.Для динамики фиксации мы видим аналогичные изменения в морфологии ЭКГ, как на рис. 6.
Рис. 6. Показан типичный пример вычисленной ЭКГ для эффекта привязки в 3D-модели.
ЭКГ отображается фиолетовым цветом, без отображения единиц измерения, поскольку важны только относительные единицы. Якорение наблюдается примерно в конце третьей секунды. После этого интервал сцепления увеличился.
https://doi.org/10.1371/journal.pcbi.1006637.g006
Динамическое закрепление сопровождается увеличением длины цикла (247 ± 16 мс против 295 ± 30 мс). Причина этого эффекта заключается в том, что вращение ротора вокруг препятствия — анатомический повторный вход — обычно медленнее, чем вращение ротора вокруг его собственного наконечника — функциональный повторный вход, который обычно находится на пределе длины цикла, разрешенном ERP.
Клинические ЭКГ, связанные с процессом динамического закрепления
В предыдущем разделе мы показали, что описанные результаты динамического закрепления в анатомической модели ЛЖ пациентов с постинфарктными рубцами соответствуют наблюдениям на ЭКГ во время инициации желудочковой аритмии.После начала у 18 из 30 пациентов (60%) наблюдалось изменение морфологии QRS в зависимости от времени. Прекардиальные отведения ЭКГ V2, V3 и V4 от двух пациентов изображены на рис. 7. Для обоих пациентов морфология QRS после дополнительных стимулов постепенно изменялась, но степень изменений здесь была различной. У пациента А это морфологическое изменение невелико, и обе части ЭКГ можно интерпретировать как переход от одной морфологии мономорфной желудочковой тахикардии (МВТ) к другой. Однако для пациента B переход от полиморфной желудочковой тахикардии (PVT) к MVT более очевиден.В остальных 16 случаях мы наблюдали различные вариации между двумя случаями, представленными на рис. 7. Дополнительный рис. S3 показывает примеры ЭКГ 4 других пациентов. Здесь у пациентов 1 и 2 мы видим существенные изменения комплексов QRS после инициации аритмии и последующее преобразование в MVT. Запись у пациента 3 менее полиморфна, а у пациента 4 мы наблюдаем явный сдвиг ЭКГ от одной морфологии к другой. Это может произойти, например, если из-за неоднородности подлежащей ткани дополнительные источники возбуждения формируются исходным источником.В целом морфология с четким изменением от PVT к MVT наблюдалась в 5/18 или 29% случаев. Эти разные степени вариации морфологии QRS могут быть вызваны многими причинами, а именно близостью созданного источника аритмии к области закрепления, глубинной степенью неоднородности и фиброза в месте инициации ротора, сложной формой рубца и т. Д.
Рис. 7. Прекардиальные отведения ЭКГ V2, V3 и V4, записанные во время индукции желудочковой тахикардии у двух пациентов с рубцами в левом желудочке.
Первые доли — ритмы с заданным темпом; отметка «0 мсек» указывает на последние экстростимулы во время запрограммированной стимуляции желудочков.
https://doi.org/10.1371/journal.pcbi.1006637.g007
Хотя этот результат не является доказательством, он подтверждает, что феномен якорения может возникать в клинических условиях и служить возможным механизмом быстрой ЖТ, вызванной запрограммированной стимуляция.
Падение якоря с роторами с очищенной кожей
Опускание якоря с роторами Cleanskin
Cut to the Chase
Тормозные колодки и роторы Cleanskin MTB предлагают высокопроизводительный вариант для экономного покупателя.Идеально, если вы с невероятной скоростью проезжаете через тормозные колодки и роторы. Эти продукты находятся на одном уровне с основными брендами с точки зрения производительности и качества, но при гораздо более низкой цене вы были бы сумасшедшими, если бы не попробовали их!
Плюсы
Отличная цена
Диапазон размеров тормозных колодок и ротора для большинства тормозных систем
Высококачественные материалы
Домашний бренд
Упаковка без излишеств
Нет никаких сомнений в том, что тормоза — важная часть настройки вашего велосипеда.От рычагов до колодок и роторов — все они должны работать в гармонии друг с другом. Но выбор того, что подходит вам, может быть самостоятельным путешествием. Качественные тормозные компоненты могут быть дорогими, поэтому исследование и тестирование — единственный способ убедиться, что у вас есть подходящая настройка, но это сильно ударит по вашему кошельку.
Cleanskin MTB предлагает постоянно расширяющийся ассортимент велосипедных компонентов по очень конкурентоспособной цене, отсюда и название — Cleanskin.Они сосредоточены на устранении ненужных аспектов дизайна и производства продукции и на обеспечении гонщиков снаряжением, которое не только работает, но и улучшает езду. С единственной целью предлагать изысканные и специализированные продукты, которые идеально подходят для всех видов горных велосипедистов, по более низкой цене, чем у основных брендов.
Узнайте, что мы думаем о UNITE 1000 light , Digital Mini Shock Pump и педали C-Flat .
Недавно мы получили набор подарков от Cleanskin MTB, который включал тормозные диски, болты и колодки ротора.В Cleanskin есть много вещей, но одно из них — это без излишеств переработанная картонная упаковка. Уже одно это помогает снизить затраты гонщика.
Cleanskin MTB максимально использует переработанные материалы для своей упаковки. Еще одна причина, по которой они могут снизить цены для нас, райдеров.
Фото: © Ричард МакГиббон
Огромный ротор 220 мм! Если это вас не остановит, ничто не остановит.
Фото: © Ричард МакГиббон
Ротор дискового тормоза с шестью болтами Cleanskin Anchor представляет собой цельный диск со скошенной кромкой и большим вырезом для снижения веса и максимальной эффективности торможения.Эти роторы также имеют несколько крутых индикаторов износа, чтобы вы могли легко определить, когда вам нужно заменить. Удобно а?
Эти роторы изготовлены из высококачественной японской нержавеющей стали и рассчитаны на длительный срок службы. Ты будешь измельчать тропы, как воин-самурай, в мгновение ока! Все роторы Cleanskin поставляются с 6 болтами, предварительно загрунтованными составом Loctite.
Доступны в различных размерах: 180 мм — 148 г, 203 мм — 183 г и колоссальные 220 мм — 242 г.
Ротор с 6 болтами: От RRP.28,95 долл. США
Шик, хоть кто-нибудь шик? Кто не любит анодированные компоненты?
Фотографии: © Ричард МакГиббон
Вам нужно заменить болты ротора или просто хотите добавить немного шика в вашу поездку? Тогда болты ротора Cleanskin T25 разобраны. Прецизионные головки Torx T25 с резьбовым фиксатором на резьбе будут удерживать ротор на месте.
Каждая упаковка содержит 12 болтов, достаточных для полной замены полного набора болтов на роторе ваших колес.
Доступен в различных цветах.
РРП. 9,95 $ за упаковку
Шик, хоть кто-нибудь шик? Кто не любит анодированные компоненты?
Фото: © Ричард МакГиббон
Cleanskin MTB предлагает хороший ассортимент колодок для большинства популярных тормозных систем на рынке. Отличный вариант, если быстро перебирать колодки. Мы предлагаем покупать оптом, это спасет вас в долгосрочной перспективе. Подушечки доступны в двух составах; спеченные или органические, чтобы вы могли выбрать лучший вариант для вашего стиля катания.
Все подушечки Cleanskin протестированы на высочайшую производительность и оснащены высококачественным пружинным фиксатором. На сегодняшний день у нас не было никаких проблем с ними, и мы не можем отличить их от основной версии бренда.
От РРЦ $ 18.95
Продукты Cleanskin MTB продолжают впечатлять постоянно растущим и очевидным образом выпускаемым ассортиментом компонентов. Сопоставьте это с их агрессивной ценой и высококачественным производством, и они предлагают очень привлекательное решение для гонщиков, которые хотят меньше тратить, но при этом уверены в том, что покупают.
На рынке так много брендов, которые борются за наше внимание, чтобы опробовать свой ассортимент продукции с помощью глянцевых и высокобюджетных рекламных кампаний. Эксперименты с различными продуктами могут быть дорогостоящими для кошелька, но с линейкой Cleanskin MTB, предлагающей такую отличную цену, почему бы вам не проверить их?
Американские райдеры, как правило, немного осторожны с незнакомыми брендами, поэтому поисковый переход может быть немного медленным, но, с другой стороны, мы — люди, склонные к приключениям, и у нас есть чувство любопытства.Мы говорим, что вам следует отбросить эту осторожность и попробовать продукты Cleanskin MTB на себе.
Ротор с 6 болтами: От RRP. 28,95 долл. США
Болты ротора: RRP. 9,95 $ за упаковку
Колодки тормозные: от 18.95 $
Спросите ассортимент Cleanskin в местном магазине велосипедов или посетите любой из магазинов ниже. Вы также можете проверить их другие продукты на веб-сайте Cleanskin.
Онлайн MTB Direct
Веб-сайт: www.mtbdirect.com.au
ВИК
Cyclescape Bendigo BENDIGO, VIC
Веб-сайт: https://cyclescape.com.au/
Телефон: 03 5152 1886
JBs Bike Tech
FERNTREE GULLY, VIC
Веб-сайт: www.jbsbiketech.com
Телефон: (03) 9758 1919
Riviera Cycles
BAIRNSDALE, VIC
Веб-сайт: www.rivieracycles.com.au
Телефон: 03 5425 2200
Royal Bikes
WARRAMBOOL, VIC
Веб-сайт: www.royalbikes.com.au
Телефон: 0435 468 574
The Rapid Wrench Melbourne
CAULFIELD SOUTH, VIC
Веб-сайт: www.therapidwrench.melbourne
Телефон: 0416 177 802
The Angry Butcher
SUNBURY, VIC
Веб-сайт: https://theangrybutcher.com.au/
Телефон: 03 8746 8500
NSW
Cheeky Bikes
LAMBTON, NSW
Веб-сайт: www.cheekybikes.com.au
Телефон: 02 49546689
Cycle Spot
MONA VALE, NSW
Веб-сайт: www.Cyclepot.com.au
Телефон: 02 9979544
OTB Cycleworks
MUSWELLBROOK, NSW
Веб-сайт: www.facebook.com/OTBcycleworks
Телефон: 04
The Bikesmith & Espresso Bar Pty Ltd
MAITLAND, NSW
Веб-сайт: www.thebikesmith.com.au
Телефон: 02 4933 3309
Velotec Sports
WICKHAM, NSW
Веб-сайт: www.velotecsports.com.au
Телефон: 0422 055 532
QLD
Big Mountain
DAISY HILL, QLD
Веб-сайт: www.bigmountain.bike
Телефон: 07 3090 3664
Just Ride Nerang
Nerang , QLD
Веб-сайт: www.justridenerang.com.au
Телефон: 07 5596 2911
Педальные головки Cycles
BRENDALE, QLD
Веб-сайт: www.pedalheads.com.au
Телефон: 07 3154 6432
ТАС
Cyclingo
SOUTH HOBART, TAS
Веб-сайт: www.cyclingo.com.au
Телефон: 03 6224 6533
My Ride Launceston
LAUNCESTON, TAS
Веб-сайт: https: // www.myride.com.au/launceston
Телефон: 03 6331 1311
Ride Bellerive
BELLERIVE, TAS
Веб-сайт: www.facebook.com/ridebellerive/
Телефон: 0362448222
Roam Cycles
LATROBE, TAS
Веб-сайт: www.roamcycles.com.au
Телефон: 04 1505 2748
Ulverstone Bicycles
ULVERSTONE, TAS
Веб-сайт: www.ulverstonebicycles.com.au/
Телефон: 03 6425 1595
West Beach Cycles
BURNIE, TAS
Веб-сайт: www.facebook.com/westbeachcycles/
Телефон: 03 6431 3530
SA
Ride Union Bike Co.
ALDGATE, SA
Веб-сайт: www.rideunionbikeco.com.au
Телефон: 08 8131 0237
WA
Bike Shed Dunsborough
DUNSBOROUGH, WA
Веб-сайт: www.bikesheddunsborough.com.au
Телефон: 08 9759 1495
The Bike Stable
SAWYERS VALLEY, WA
Веб-сайт: https: // thebikestablewa.com.au/
Телефон: 08 9295 3667
Empire Cycles
BECKENHAM, WA
Веб-сайт: https://empirecycles.com.au/
Телефон: 08 6558 1761
Humble Bicycle Co
VASSE, WA
Веб-сайт: www.facebook.com/humblebikeco/
Телефон: 08 9744 7861
Kalamunda Cycles
KALAMUNDA, WA
Веб-сайт: www.kalamundacycles.com.au
Телефон: 08 9293 2115
NT
Велоспорт в глубинке
ALICE SPRINGS, NT
Веб-сайт: велоспорт в глубинке.com
Телефон: +61889521541
Диски, роторы и оборудование для автомобильной промышленности Один новый передний ротор дискового тормоза Zimmermann 400361420 для Mercedes MB
Диски, роторы и оборудование Automotive One New Zimmermann Disc Brake Rotor Front 400361420 for Mercedes MBНайдите много отличных новых и подержанных опций и получите лучшие предложения на One New Zimmermann Disc Brake Rotor Front 400361420 для Mercedes MB по лучшим онлайн-ценам на! Бесплатная доставка для многих товаров !.Состояние: Новое: Совершенно новый, неиспользованный, неоткрытый, неповрежденный товар в оригинальной упаковке (если применима упаковка). Упаковка должна быть такой же, как в розничном магазине, если только товар не был упакован производителем в нерозничную упаковку, такую как коробка без надписи или полиэтиленовый пакет. См. Список продавца для получения полной информации. См. Все определения условий : Бренд: : Zimmermann , Проданное количество: : продается отдельно : Номер детали производителя: : 400.3614.20, 400361420 , Гарантия: : 2 года : Положение: : Спереди , Тип установки: : Прямая замена : Размещение на транспортном средстве: : Передняя Описание продукта: : Ротор дискового тормоза : Примечание по установке: : Вентилируемый, до оси R163868 , UPC: : Не применяется ,。
один новый ротор дискового тормоза Zimmermann передний 400361420 для Mercedes MB
Один новый передний ротор дискового тормоза Zimmermann 400361420 для Mercedes MB
Купите женские замшевые кроссовки Coach Womens Ian Suede Low Top на шнуровке и другие модные кроссовки на. Вот еще несколько причин полюбить это милое кольцо :.Jewels Obsession I Love My Dad Necklace, мы рекомендуем вам полностью прочитать описание продукта ниже, прежде чем размещать заказ, НЕ используйте воздушный удар для съемника, все продукты Bliss Manufacturing, Bahco 111M-13 D3113A комбинированный гаечный ключ, бесплатная доставка при наличии Предметы. Один новый передний ротор дискового тормоза Zimmermann 400361420 для Mercedes MB . 2) ЛЕГКИЙ УХОД-Машинная стирка на холоду. В наших десертных тарелках «Золушка» изображена ослепительная Золушка и ее очаровательная карета. Дата первого упоминания: 23 августа — Основание окрашено двумя слоями коричневого морилки KONA — Дерево трижды окрашено Hunter Green для выделения насыщенного зеленого цвета. Время прибытия обычно составляет 16-28 дней (иногда до 40 дней).Devant toutes ces beaux objets qui nous parlent du passé et qui. и вода без разрушения. (Иногда плохая погода влияет на доставку). Один новый передний ротор дискового тормоза Zimmermann 400361420 для Mercedes MB . Эти конструкции, несомненно, будут лестными и дополнительными, а также удобными. ~ Эти изоляторы окрашены в красивый мандариновый апельсин и станут прекрасным дополнением к вашей коллекции. Розовый таунхаус с аркой 25 дюймов x 7, СООТВЕТСТВИЕ является естественным побочным продуктом нашего опыта и приверженности качеству.очень удобен в обращении и легко чистится. Размер мешков из муслина: прибл. Комнатный пол премиум-класса с подогревом воздуха Термостат контроля температуры Переключатель 16 A 230 В Белый: Кухня и дом, Спасибо и, пожалуйста, напишите нам, если у вас возникнут вопросы, и мы свяжемся с вами как можно скорее, One New Zimmermann Disc Brake Rotor Front Front 400361420 для Mercedes MB . Идеально подходит для Apple iPad Pro 113. Изготовлен из прочного материала 3M. Удаляется, не оставляя следов.
Один новый передний ротор дискового тормоза Zimmermann 400361420 для Mercedes MB
Найдите много отличных новых и подержанных опций и получите лучшие предложения на One New Zimmermann Disc Brake Rotor Front 400361420 для Mercedes MB по лучшим онлайн-ценам на, Бесплатная доставка для многих продуктов, Дайте вам больше выбора Покупайте по честной цене в Интернете Лучший выбор Элитная современная мода. Лучшие бренды по конкурентоспособным ценам! hankjobenhavn.com
один новый передний ротор дискового тормоза Zimmermann 400361420 для Mercedes MB hankjobenhavn.com
Национальные ветряные часы | Размер промышленных ветряных турбин
См. Также информационный бюллетень NWW: «Насколько велика ветряная турбина?» [28 КБ PDF]
Насколько велика ветряная турбина?
Промышленные ветряные турбины намного больше, чем те, которые вы можете увидеть на школьном дворе или за чьим-либо домом.
Например, широко используемая модель GE на 1,5 мегаватта состоит из 116-футовых лопастей на вершине 212-футовой башни общей высотой 328 футов.Лезвия охватывают вертикальное воздушное пространство размером чуть менее акра.
1,8-мегаваттный Vestas V90 из Дании имеет 148-футовые лопасти (охват более 1,5 акра) на 262-футовой башне, всего 410 футов.
Еще одна модель, которую чаще можно увидеть в США, — это 2-мегаваттная Gamesa G87 из Испании с 143-футовыми лопастями (чуть менее 1,5 акра) на 256-футовой башне общей площадью 399 футов.
Многие существующие и новые модели достигают общей высоты более 600 футов. Смотрите спецификации для нескольких моделей на AWEO.орг.
Как транспортируются компоненты ветряной турбины?
Транспортировка таких крупных предметов и кранов, необходимых для их сборки, часто вызывает проблемы в отдаленных районах, где они обычно строятся. Дороги должны быть расширены, повороты выпрямлены, а в диких местах вообще построены новые дороги.
На какой платформе установлена ветряная турбина?
Стальная башня закреплена на платформе из более чем тысячи тонн бетона и стальной арматуры, шириной от 30 до 50 футов и глубиной от 6 до 30 футов.Валы иногда опускают дальше, чтобы закрепить его. Горные вершины должны быть взорваны, чтобы создать ровную площадку не менее 3 акров. Платформа имеет решающее значение для стабилизации огромного веса турбины в сборе.
Сколько весят ветряные турбины?
В модели GE мощностью 1,5 мегаватта одна гондола весит более 56 тонн, лопасть в сборе весит более 36 тонн, а сама башня весит около 71 тонны — общий вес 164 тонны. Соответствующий вес для Vestas V90 составляет 75, 40 и 152, всего 267 тонн; а для Gamesa G87 72, 42 и 220 — всего 334 тонны.
Что такое гондола?
Редуктор, который преобразует медленный поворот лопастей в более высокую скорость ротора, и генератор представляют собой массивные части оборудования, размещенные в контейнере размером с автобус, называемом гондолой, наверху башни. Лопасти прикреплены к ступице ротора на одном конце гондолы. Некоторые гондолы включают посадочную площадку для вертолета.
Ветровые турбины более опасны, чем другие конструкции аналогичного размера?
Помимо шума и вибрации, которые неизбежно создают такие огромные движущиеся машины, они должны быть украшены мигающими огнями днем и ночью, чтобы улучшить их видимость.Подвижные лопасти привлекают внимание. И они должны быть возведены там, где нет других высоких сооружений, препятствующих ветру.
Какая площадь требуется для установки ветроэнергетики?
Огромные турбины требуют соответственно большой площади вокруг них, свободной от деревьев и других турбин, чтобы максимизировать влияние ветра и избежать помех. Они должны иметь зазор 10 диаметров ротора в направлении ветра и 3 диаметра ротора во всех остальных направлениях. В ряду из нескольких турбин, перпендикулярных ветру (как на горном хребте), GE 1.Для модели мощностью 5 МВт потребуется не менее 32 акров, а для Vestas V90 — 78 акров для каждой башни. В массиве, который может использовать ветер с любого направления, GE требуется 82 акра, а Vestas V90 — 111 акров на башню.
На практике площадь варьируется, в среднем около 50 акров на мегаватт мощности. На горных хребтах мощность турбин обычно составляет около 10 МВт на милю.
Можно ли и дальше использовать территорию вокруг ветряной турбины?
Только подвергая себя опасности.Помимо неприятных шумов и отвлекающих движений, ветряные турбины небезопасны. Это высоковольтные электрические устройства с большими подвижными частями. Подсчитано, что на каждые 100 турбин отламывается одна лопатка (см. Larwood, 2005). Зимой массивные ледяные покровы могут нарастать, а затем падать или отбрасываться. Доступ к земле вокруг ветряных турбин обычно ограничен даже для землевладельца.
Являются ли турбины большего размера более эффективными?
Нет, они просто побольше. Мощность зависит от скорости ветра и комбинации диаметра лопастей и размера генератора.Большие лопасти на более высокой башне могут улавливать больше ветра для работы более крупного генератора, но они не делают это более эффективно, чем модели меньшего размера, и для них требуется соответственно большая площадь вокруг них.
Роторы— обзор | ScienceDirect Topics
Миксеры для высоковязких жидкостей и паст
В высоковязких жидкостях, пастах или тесте смешивание происходит путем замешивания материала у стенки сосуда или с другим материалом, складывания несмешанных продуктов в смешанную часть и сдвига для растяжения материал (рис.4.9). Эффективное перемешивание достигается за счет создания и повторного объединения свежих поверхностей в пище, но поскольку материал не течет легко, необходимо либо перемещать лопасти миксера по емкости, либо перемещать пищу к лопастям миксера.
Рис. 4.9. Экспериментальное замешивание теста с красителем, показывающее действие замешивания.
фото автораВязкие жидкости смешиваются с помощью тихоходных крыльчаток с вертикальным валом, таких как мешалки с несколькими лопастями (шиберными), которые развивают большие усилия сдвига.Базовая конструкция в этой группе — мешалка типа «якорь и затвор». Некоторые сложные конструкции имеют рычаги на заслонке, которые входят в зацепление с неподвижными рычагами на якоре для увеличения срезающего действия, тогда как другие имеют наклонные вертикальные лезвия для обеспечения радиального движения в пище. Этот тип оборудования также используется с подогреваемыми сосудами для смешивания, когда якорь снабжен скребками для предотвращения пригорания пищи на горячей поверхности. Развитие базовой конструкции включает три отдельных мешалки, включая якорь, высокоскоростной диспергатор и роторно-статорный гомогенизатор.На рис. 4.10 показан миксер со спиральным якорем, который подходит для продуктов с более высокой вязкостью.
Рис. 4.10. Смеситель с многовальным цилиндрическим якорем.
любезно предоставлено Ross Food Mixers & amp; Blenders Ltd) (Anon 2006b)Планетарные (или «орбитальные») миксеры получили свое название от пути, по которому проходят вращающиеся лопасти, которые включают все части сосуда в процессе перемешивания (рис. 4.11a). Лопасти, вращающиеся со скоростью 40–370 об / мин, могут быть расположены по центру в статической чаше, или лопасти смещены от центра сосуда, вращающегося в прямом или противотоке.В обоих типах имеется небольшой зазор между лопастями и стенкой сосуда. Лопасти затвора используются для смешивания паст, смешивания ингредиентов и приготовления спредов; крючки используются для замеса теста, а венчики используются для приготовления теста или соуса. Детали различных типов оборудования описаны Аноном (2005b). Запатентованная конструкция (рис. 4.11b) сочетает в себе планетарную лопасть и высокоскоростную диспергирующую лопасть. Обе мешалки вращаются вокруг своих осей, а также непрерывно вращаются вокруг емкости.Планетарный нож подает материалы непосредственно в зону высокого сдвига вращающегося высокоскоростного диспергатора. Обе мешалки имеют независимо регулируемые скорости, и такая комбинация действий смешивания устраняет необходимость в нескольких мешалках (Anon 2006b).
Рис. 4.11. (a) Планетарный миксер (b) Схема комбинированной планетарной лопасти и высокоскоростной диспергирующей лопасти при работе планетарного миксера,
(любезно предоставлено GEA Pharma Systems), (любезно предоставлено Ross Food Mixers & amp; Blenders Ltd) (Anon 2008c)Software Используется для моделирования действия планетарного миксера, показывает траектории частиц во время поворотов лопастей и используется для расчета «индекса распределительного перемешивания» (количественная мера эффективности перемешивания) (Anon 2006a).Более поздняя разработка — двойные планетарные миксеры, которые оснащены двумя вертикальными перемешивающими лопастями, обеспечивающими двойное вращательное движение. Сообщается, что смешивание происходит на 30% быстрее, чем с другими планетарными миксерами. Они могут работать под вакуумом, а смесительный бак с рубашкой позволяет смешивать термочувствительные продукты с контролируемой температурой. Все планетарные миксеры имеют герметичный редуктор для предотвращения загрязнения продуктов маслом или жиром. Размеры варьируются от 10 до 1500 литров, и они могут смешивать продукты с вязкостью от нескольких тысяч до нескольких миллионов сантипуаз (Anon 2008c).
Смеситель с Z-лопастями (или сигма-лопастями) (рис. 4.12) состоит из двух сверхмощных лопастей, установленных горизонтально в металлическом желобе. Лезвия входят в зацепление и вращаются навстречу друг другу с одинаковой или разной скоростью (14–60 об / мин), создавая высокие усилия сдвига как между лезвиями, так и между лезвиями и плотно прилегающим желобом. Эти миксеры в основном используются для замеса теста, но также используются для сахарных паст, жевательной резинки и марципана. Они потребляют значительное количество энергии, которая рассеивается в продукте в виде тепла, если только стенки желоба не покрыты рубашкой для контроля температуры.Специальные конструкции для измельчения и смешивания имеют зубчатые лезвия, а другие конфигурации лезвий включают решетку, двойной набен и двойной захват (McDonagh 1987). Математическое моделирование и численное моделирование для прогнозирования эффективности перемешивания с использованием смесителей с Z-образными лопастями описаны Коннелли (2006).
Рис. 4.12. Смеситель с Z-образными лопастями.
любезно предоставлено Winkworth Machinery Ltd на www.mixer.co.uk/zbmix.htmlРоторно-статорные смесители состоят из высокоскоростного (3600–10 000 об / мин) центробежного ротора, плотно вставленного в стационарный корпус с прорезями.Преимущества смесителей периодического действия ротор-статор с высоким усилием сдвига перед обычными мешалками или мешалками проистекают из четырехступенчатого смешивания / сдвига, когда материалы протягиваются через специально разработанную рабочую головку (рис. 4.13). Четыре этапа следующие:
Рис. 4.13. Работа роторно-статорной мешалки.
любезно предоставлено Silverson Machines Ltd) (Anon 2008d- (a)
Лопасти высокоскоростного ротора создают зону низкого давления, которая вытягивает жидкие и твердые материалы вверх от дна резервуара в прецизионно обработанную головку статора.
- (b)
Центробежная сила перемещает материалы к периферии головки, где они подвергаются воздействию гидравлических сил сдвига и механического сдвига между концами лопастей ротора и внутренней стенкой статора.
- (c)
Материалы вытесняются с высокой скоростью через отверстия или прорези в статоре и подвергаются интенсивному механическому сдвигу на краях лопастей ротора и прорезях в статоре, что вызывает дальнейшее перемешивание и частицы уменьшение размера.
- (d)
Материалы, выталкиваемые из головки, с высокой скоростью радиально выбрасываются в стороны смесительной емкости, а свежий материал непрерывно втягивается в головку. Горизонтальное вытеснение и вертикальное всасывание в головку создают схему циркуляции, которая поддерживает цикл смешивания и сводит к минимуму возмущение поверхности жидкости, таким образом уменьшая увлеченный воздух, который может вызвать аэрацию.
Рабочие головки легко взаимозаменяемы и позволяют выполнять широкий спектр операций смешивания, включая эмульгирование, гомогенизацию, дезинтеграцию, растворение, диспергирование твердых веществ в жидкости, смешивание и разрушение твердых частиц и агломератов.Пример головки показан на рис. 4.14 (а) для общих применений смешивания, дезинтеграции твердых веществ и приготовления гелей и загустителей, суспензий, растворов и суспензий. Головка с прорезями (рис. 4.14b) используется для разрушения волокнистых материалов, таких как ткани животных и растений. Другие головки подходят для приготовления эмульсий и тонких коллоидных суспензий (Глава 3, раздел 3.2.3). По сравнению с обычными миксерами время обработки сокращается до 90%, а консистенция продукта и эффективность процесса улучшаются.Они могут работать с производительностью от 15 до 200 000 л / ч — 1 (Anon 2008d).
Рис. 4.14. Конструкции головки статора: (а) для общего смешивания и (б) головка с прорезями для измельчения волокнистых материалов.
любезно предоставлено Silverson Machines Ltd) (Anon 2008d) В отличие от дисковых крыльчаток, которые в основном полагаются на гидравлический сдвиг, создаваемый очень высокими рабочими скоростями (24–27 мс — 1 ), комбинированное гидравлическое и механическое срезание в роторе- Для статорных смесителей требуются меньшие скорости наконечников (15–18 м / с — 1 ) и, следовательно, меньшая мощность.Некоторые новые конструкции также имеют вращающийся статор, приводимый в действие трением жидкости, который движется со скоростью от одной десятой до одной пятнадцатой скорости ротора. Это увеличивает перекачивающее действие смесителя для увеличения расхода при сохранении высоких скоростей сдвига при более низких скоростях наконечника (12–15 м с — 1 ), что опять же снижает энергопотребление. Еще одна разработка — неподвижный ротор и статор, объединенные в единый блок. Материал втягивается крыльчатками в смесительную головку сверху и снизу и разрезается канавками на роторах.Два высокоскоростных противоточных потока встречаются в статоре и приводят к сильной турбулентности и гидравлическому сдвигу. Гидравлическое давление выталкивает пищу на периферию статора, где она подвергается механическому сдвигу при прохождении через заостренные прорези. Этот тип смесителя разработан для смесей с высокой вязкостью, которые нельзя смешивать с помощью обычной мешалки, но не требуют интенсивного сдвигового воздействия роторно-статорного смесителя. Он может быстро превращать большие объемы (до 15 000 кг — 1 ) порошков в жидкости, обеспечивая однородный однородный продукт — одно из самых сложных приложений для смешивания.Моноблочная смесительная головка имеет гигиеничный дизайн для очистки на месте (CIP) или стерилизации на месте (SIP) и требует минимального обслуживания из-за отсутствия изнашиваемых деталей. Кроме того, он требует меньше энергии по сравнению с обычными смесителями с большим усилием сдвига (Ames 2000). Типичные рабочие условия для этих типов смесителей показаны в Таблице 4.3.
Таблица 4.3. Обзор условий эксплуатации смесителей с низким и большим усилием сдвига
| Состояние | Тип оборудования | Значение | |
|---|---|---|---|
| Скорость конуса — высокий сдвиг | Крыльчатка с открытым диском | 24–27 мс — 1 | |
| Рядный | 27–33.5 мс — 1 | ||
| Закрытый вращающийся ротор-статор | 15–18 мс — 1 | ||
| Ротор-статор с вращающимся статором | 12–18 мс — 1 | Фиксированный ротор и статор | 12–18 мс — 1 |
| Скорость конца — малый сдвиг | — | 3–9 мс — 1 | |
| Геометрическое сходство | Низкая скорость | 0,25 –0.60 | |
| (соотношение диаметров смесительной головки и резервуара) | Высокая скорость / сдвиг | 0,10–0,20 | |
| Объемная скорость жидкости | Медленное перемешивание / высокая вязкость | 0,12–0,18 мс — 1 | |
| Интенсивное перемешивание — большинство применений | 0,18–0,24 мс — 1 | ||
| Интенсивное перемешивание — сложные приложения | 0,24–0,3 м с — 1 | ||
| 3–0,45 мс — 1 | |||
| Оборачиваемость резервуара | Низкая вязкость (1–100 сП) & lt; 1100 литров | 4–6 в минуту | |
| Высокая вязкость (500–5000 сП) & lt; 1100 литров | 2–4 в минуту | ||
| Низкая вязкость (1–100 сП) 1100–2200 литров | 2–4 в минуту | ||
| Высокая вязкость (500–5000 сП) 1100–2200 литров | 1-2 в минуту |
По материалам Ames (2000), Beaudette (2001) и Anon (2001b)
Статические или «неподвижные» смесители были разработаны для смешивания вязких материалов и жидкостей или для смешивания порошков с жидкостями. .Эти смесители состоят из ряда точно выровненных статических смесительных элементов (рис. 4.15), которые находятся внутри трубопроводов технологической линии. Элементы разделяют, вращают и объединяют пищевой материал в точно определенном порядке в соответствии с типом продукта, который нужно смешать, и требуемой степенью перемешивания. В неподвижных смесителях с «низким перепадом давления» полуэллиптические пластины расположены в трубчатом корпусе и лучше всего подходят для смешивания и смешивания турбулентных потоков с низкой вязкостью.Неподвижные смесители «Генератор межфазной поверхности» используются для ламинарных потоков с высокой вязкостью. Этот дизайн генерирует более 2 миллионов математически предсказуемых слоев с использованием десяти элементов смешивания (Anon 2006c).
Рис. 4.15. Линейный неподвижный смесительный элемент.
любезно предоставлено Komax Systems Inc. на сайте www.komax-com / det-fdsanitary.htmlНеподвижные смесители работают с использованием трех режимов перемешивания: радиального перемешивания, разделения потока и нестационарного перемешивания. При радиальном перемешивании пища отклоняется элементами посредством серии поворотов на 180 °, которые заставляют ее перемещаться от центра к стенке трубы и обратно.При разделении потока материал разделяется на два компонента первым смешивающим элементом, а затем поворачивается на 180 ° перед разделением на четыре потока вторым элементом и так далее за последующими элементами до тех пор, пока не будет достигнута требуемая степень перемешивания. При переходном перемешивании используются промежутки между элементами, позволяющие расслабить вязкий материал после последовательных радиальных перемешиваний. Эти смесители устраняют необходимость в резервуарах, мешалках и движущихся частях, тем самым снижая капитальные затраты и требования к техническому обслуживанию.Они использовались в производстве шоколада для обработки тертого какао (Richards 1997) и для смешивания ингредиентов с целью получения однородных профилей температуры или концентрации. Некоторые типы смесителей больше подходят для турбулентного потока или ламинарного потока (глава 1, раздел 1.