SPbPU EL — Разработка импульсного блока питания на базе ШИМ-контроллера UC3842: выпускная квалификационная рабо…
Данная работа посвящена вопросу модификации существующих схемотехнических решений импульсных блоков питания под управлением ШИМ-контроллеров распространённой серии UC384x. Цель работы – разработка универсального источника вторичного питания с широким диапазоном регулировки выходного напряжения и размещение его компонентов на печатной плате, имеющей размеры 9х12 см.
Задачи, которые решались в ходе выполнения работы:
1. Выбор топологии схемы разрабатываемого блока питания;
2. Расчёт элементов принципиальной схемы устройства и выбор компонентов в рамках её разработки;
3. Проверка работоспособности схемы с помощью схемотехнического моделирования в системе автоматического проектирования;
4. Трассировка печатной платы устройства.
В результате работы был разработан обратноходовой импульсный блок питания, работающий от сети переменного тока 220 В ± 20%, с диапазоном регулировки выходного напряжения 14 ÷ 28 В, максимальной выходной мощностью 180 Вт и расчётным КПД ≈ 85,4%.![]()
This work is dedicated to the modification of existing circuit designs of switch-mode power supplies based on a widespread UC384x series of PWM controllers. The purpose of this work is to develop an universal secondary power supply with a wide range of output voltage adjustment and to place its components on a printed circuit board with dimensions 9×12 cm.
Tasks that were solved in this work:
1. Selection of circuit topology for the power supply;
2. Calculation of circuit elements and selection of components;
3. Working capacity test of the circuit by its simulation in Micro-Cap;
4. PCB trace of the device.
As a result of this work a flyback switch-mode power supply using AC power 220 V ± 20% as a source, with output voltage adjustment ranged 14 ÷ 28 V, maximum output power 180 W and estimated efficiency ≈ 85,4% was developed.
Солнечные контроллеры (MPPT, ШИМ) | Энергии Солнца
МРРТ контроллер, это устройство, которое повышает эффективность солнечной батареи за счет функции слежения за Точкой Максимальной Мощности (ТММ). В переводе с английского, аббревиатура означает Maximum Power Point Tracking . Прибор это относительно новый, их концепция была сформирована в середине 80-х гг. И тогда же они впервые появились на рынке. Но за истекшие тридцать лет, сфера электроники наполнилась новыми компонентами, которые:
- Увеличили функционал МРРТ.
- Повысили их надёжность.
- Уменьшили их размеры.
- Позволили продлить гарантию.
- Обеспечили высочайшую точность работы.
Специфика применения
Использование МРРТ контроллеров в бесперебойных или автономных системах энергоснабжения имеет две составляющие, которые существенно изменяют многие аспекты функционирования подобных комплексов. Первый из них, это работа аккумуляторов.
Первый из них, это работа аккумуляторов.
- Зарядка аккумуляторных батарей, для увеличения срока службы и поддержки номинальных рабочих параметров, требует особого подхода. Дело в том, что процесс зарядки это сложный комплекс химических реакций, которые меняют физико-химические характеристики пластин и электролита несколько раз в продолжении одно цикла. В соответствии с этими изменениями, должна изменяться характеристика тока. При этом, все изменения не ступенчатые, и не имеют чёткой привязки ко времени. То есть требуется контроль состояния аккумуляторной батареи (АКБ) в каждый момент времени, и соответствующие изменения зарядного тока. При этом, учитываются и этапы зарядки:
- Наполнение.
- Насыщение.
- Выравнивание.
- Поддержка.
Не соблюдение режимов зарядки, приводит к тому, что АКБ быстро теряют ёмкость, перестают держать заряд и как следствие требуют замены. А затраты на обновление АКБ в системе автономного снабжения составляют почти половину стоимости всего оборудования.
Современные контроллеры МРРТ, имеют возможность снимать показания не только с фотоэлектрических модулей, но и с аккумуляторов. При этом регистрируются данные по нескольким определяющим параметрам. А в зависимости от исполнения, все показания могут выводиться на дисплей или отображаться с помощью светодиодных индикаторов.
- Второй важный аспект – недобор мощности всей системы фотоэлектрических преобразователей. Причина здесь тоже разноплановая. Процесс выработки электроэнергии у солнечных батарей изменяется в зависимости от:
- Степени освещённости.
- Температуры модуля.
- Выбранной нагрузки.
При этом, определение и выбор потребляемой нагрузки, довольно специфический процесс, которым невозможно управлять без использования МРРТ контроллера.
Особняком стоят системы фотоэлектрических преобразователей, которые составлены из панелей разных типов. Включение в такую систему контроллера МРРТ, насущная необходимость. Без него эффективность выработки электроэнергии снижается на 16-38%. Это всё равно что купить а/м Ferrari, но из-за того что нет рычага переключения скоростей, вы будете ездить только на первой передаче. Тоже самое будет и с фотоэлементами.
Это всё равно что купить а/м Ferrari, но из-за того что нет рычага переключения скоростей, вы будете ездить только на первой передаче. Тоже самое будет и с фотоэлементами.
В связи с тем, что в определённые моменты напряжение на клеммах АКБ может быть больше, нежели на выходе от панелей, то собирая систему, её надо комплектовать таким образом, чтобы добиться превалирования напряжения, над мощностью.
Дополнительным доказательством служит и формула для расчёта потери в проводниках: P = I2 x R. Обратите внимание, что уменьшая силу тока (I) в два раза, на выходе получают рост мощности в 4 раза, и это при использовании той же проводки.
Максимальной эффективности контроллеры МРРТ позволяются добиться при мощности системы от 200 Вт. А в случае, если модули имеют нестандартное выходное напряжение, без использования контроллеров МРРТ, обойтись невозможно.
Во время работы, контроллеры МРРТ потребляют от 2 до 5 Вт мощности. Но с учётом повышения эффективности работы всей системы в целом, подобный расход можно зарегистрировать только с помощью контрольных приборов. Ведь оптимизируя работу солнечных батарей, контроллеры МРРТ приводят к тому, что мощность всей системы автономного энергоснабжения вырастает на 25-30%. Другими словами, подключая контроллер МРРТ, вы повышаете мощность без приобретения дополнительных фотопреобразователей.
Но с учётом повышения эффективности работы всей системы в целом, подобный расход можно зарегистрировать только с помощью контрольных приборов. Ведь оптимизируя работу солнечных батарей, контроллеры МРРТ приводят к тому, что мощность всей системы автономного энергоснабжения вырастает на 25-30%. Другими словами, подключая контроллер МРРТ, вы повышаете мощность без приобретения дополнительных фотопреобразователей.
принцип действия и сфера применения. Принцип работы ШИМ контроллера
Все, кто когда — либо пользовался аккумуляторным шуруповертом, наверняка слышали писк, исходящий изнутри. Это свистят обмотки двигателя под воздействием импульсного напряжения, порождаемого системой ШИМ.
Другим способом регулировать обороты двигателя, подключенного к аккумулятору, просто неприлично, хотя вполне возможно. Например, просто последовательно с двигателем подключить мощный реостат, или использовать регулируемый линейный стабилизатор напряжения с большим радиатором.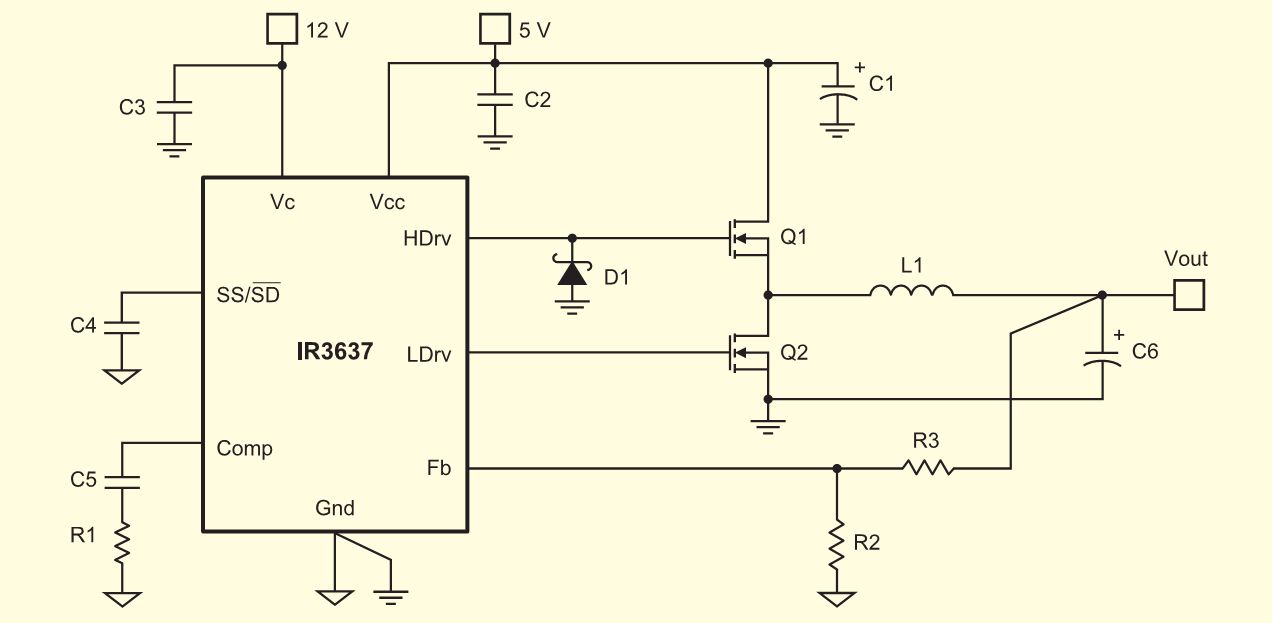
Вариант ШИМ — регулятора на основе таймера 555 показан на рисунке 1.
Схема достаточно проста и базируется все на мультивибраторе, правда переделанном в генератор импульсов с регулируемой скважностью, которая зависит от соотношения скорости заряда и разряда конденсатора C1.
Заряд конденсатора происходит по цепи: +12V, R1, D1, левая часть резистора P1, C1, GND. А разряжается конденсатор по цепи: верхняя обкладка C1, правая часть резистора P1, диод D2, вывод 7 таймера, нижняя обкладка C1. Вращением движка резистора P1 можно изменять соотношение сопротивлений его левой и правой части, а следовательно время заряда и разряда конденсатора C1, и как следствие скважность импульсов.
Рисунок 1. Схема ШИМ — регулятора на таймере 555
Схема эта настолько популярна, что выпускается уже в виде набора, что и показано на последующих рисунках.
Рисунок 2. Принципиальная схема набора ШИМ — регулятора.
Здесь же показаны временные диаграммы, но, к сожалению, не показаны номиналы деталей.![]() Их можно подсмотреть на рисунке 1, для чего он, собственно, здесь и показан. Вместо биполярного транзистора TR1 без переделки схемы можно применить мощный полевой, что позволит увеличить мощность нагрузки.
Их можно подсмотреть на рисунке 1, для чего он, собственно, здесь и показан. Вместо биполярного транзистора TR1 без переделки схемы можно применить мощный полевой, что позволит увеличить мощность нагрузки.
Кстати, на этой схеме появился еще один элемент — диод D4. Его назначение в том, чтобы предотвратить разряд времязадающего конденсатора C1 через источник питания и нагрузку — двигатель. Тем самым достигается стабилизация работы частоты ШИМ.
Кстати, с помощью подобных схем можно управлять не только оборотами двигателя постоянного тока, но и просто активной нагрузкой — лампой накаливания или каким-либо нагревательным элементом.
Рисунок 3. Печатная плата набора ШИМ — регулятора.
Если приложить немного труда, то вполне возможно такую воссоздать, используя одну из программ для рисования печатных плат. Хотя, учитывая немногочисленность деталей, один экземпляр будет проще собрать навесным монтажом.
Рисунок 4. Внешний вид набора ШИМ — регулятора.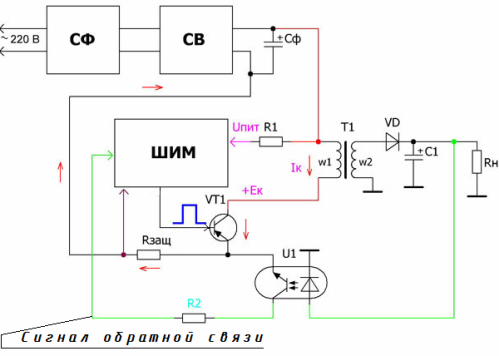
Правда, уже собранный фирменный набор, смотрится достаточно симпатично.
Вот тут, возможно, кто-то задаст вопрос: «Нагрузка в этих регуляторах подключена между +12В и коллектором выходного транзистора. А как быть, например, в автомобиле, ведь там все уже подключено к массе, корпусу, автомобиля?»
Да, против массы не попрешь, тут можно только рекомендовать переместить транзисторный ключ в разрыв «плюсового» провода. Возможный вариант подобной схемы показан на рисунке 5.
Рисунок 5.
На рисунке 6 показан отдельно выходной каскад на транзисторе MOSFET. Сток транзистора подключен к +12В аккумулятора, затвор просто «висит» в воздухе (что не рекомендуется), в цепь истока включена нагрузка, в нашем случае лампочка. Такой рисунок показан просто для объяснения, как работает MOSFET транзистор.
Рисунок 6.
Для того, чтобы MOSFET транзистор открыть, достаточно относительно истока подать на затвор положительное напряжение. В этом случае лампочка зажжется в полный накал и будет светить до тех пор, пока транзистор не будет закрыт.
В этом случае лампочка зажжется в полный накал и будет светить до тех пор, пока транзистор не будет закрыт.
На этом рисунке проще всего закрыть транзистор, замкнув накоротко затвор с истоком. И такое вот замыкание вручную для проверки транзистора вполне пригодно, но в реальной схеме, тем более импульсной придется добавить еще несколько деталей, как показано на рисунке 5.
Как было сказано выше, для открывания MOSFET транзистора необходим дополнительный источник напряжения. В нашей схеме его роль выполняет конденсатор C1, который заряжается по цепи +12В, R2, VD1, C1, LA1, GND.
Чтобы открыть транзистор VT1, на его затвор необходимо подать положительное напряжение от заряженного конденсатора C2. Совершенно очевидно, что это произойдет только при открытом транзисторе VT2. А это возможно лишь в том случае, если закрыт транзистор оптрона OP1. Тогда положительное напряжение с плюсовой обкладки конденсатора C2 через резисторы R4 и R1 откроет транзистор VT2.
В этот момент входной сигнал ШИМ должен иметь низкий уровень и шунтировать светодиод оптрона (такое включение светодиодов часто называют инверсным), следовательно, светодиод оптрона погашен, а транзистор закрыт.
Чтобы закрыть выходной транзистор, надо соединить его затвор с истоком. В нашей схеме это произойдет, когда откроется транзистор VT3, а для этого требуется, чтобы был открыт выходной транзистор оптрона OP1.
Сигнал ШИМ в это время имеет высокий уровень, поэтому светодиод не шунтируется и излучает положенные ему инфракрасные лучи, транзистор оптрона OP1 открыт, что в результате приводит к отключению нагрузки — лампочки.
Как один из вариантов применения подобной схемы в автомобиле, это дневные ходовые огни. В этом случае автомобилисты претендуют на пользование лампами дальнего свете, включенными вполнакала. Чаще всего эти конструкции на микроконтроллере, в интернете их полно, но проще сделать на таймере 555.
Драйверы для транзисторов MOSFET на таймере 555
Еще одно применение интегральный таймер 555 нашел в трехфазных инверторах, или как их чаще называют частотно — регулируемых приводах. Основное назначение «частотников» — это регулирование частоты вращения трехфазных асинхронных двигателей. В литературе и в интернете можно найти немало схем самодельных частотных приводов, интерес к которым не пропадает до настоящего времени.
В литературе и в интернете можно найти немало схем самодельных частотных приводов, интерес к которым не пропадает до настоящего времени.
В целом идея такова. Выпрямленное сетевое напряжение с помощью контроллера преобразуется в трехфазное, как в промышленной сети. Но частота этого напряжения может меняться под воздействием контроллера. Способы изменения различны, — просто от ручного управления до регулирования системой автоматики.
Блок схема трехфазного инвертора показана на рисунке 1. Точками A,B,C показаны три фазы, к которым подключается асинхронный двигатель. Эти фазы получаются при коммутации транзисторных ключей, в качестве которых на этом рисунке показаны специальные транзисторы IGBT.
Рисунок 1. Блок схема трехфазного инвертора
Между устройством управления (контроллером) и силовыми ключами установлены драйверы силовых ключей инвертора. В качестве драйверов используются специализированные микросхемы типа IR2130, позволяющие подключить к контроллеру сразу все шесть ключей,- три верхних и три нижних, а кроме этого еще обеспечивает целый комплекс защит. Все подробности об этой микросхеме можно узнать в Data Sheet.
Все подробности об этой микросхеме можно узнать в Data Sheet.
И все бы хорошо, но для домашних опытов такая микросхема слишком дорогая. И тут на помощь опять приходит наш старый знакомый интегральный таймер 555, он же КР1006ВИ1. Схема одного плеча трехфазного моста показана на рисунке 2.
Рисунок 2. Драйверы для транзисторов MOSFET на таймере 555
В качестве драйверов верхних и нижних ключей силовых транзисторов используются КР1006ВИ1, работающие в режиме триггера Шмитта. При использовании таймера в таком режиме достаточно просто получить импульсный ток открывания затвора не менее 200мА, что обеспечивает быстрое переключение выходных транзисторов.
Транзисторы нижних ключей соединены непосредственно с общим проводом контроллера, поэтому никаких трудностей в управлении драйверами не возникает, — нижние драйверы управляются непосредственно от контроллера логическими сигналами.
Несколько сложнее обстоит дело с верхними ключами. Прежде всего, следует обратить внимание на то, как осуществляется питание драйверов верхних ключей. Такой способ питания называется «бустрепным». Смысл его в следующем. Питание микросхемы DA1 осуществляется от конденсатора C1. А вот каким образом он может зарядиться?
Такой способ питания называется «бустрепным». Смысл его в следующем. Питание микросхемы DA1 осуществляется от конденсатора C1. А вот каким образом он может зарядиться?
Когда откроется транзистор VT2 минусовая обкладка конденсатора C1 практически связана с общим проводом. В это время конденсатор C1 заряжается от источника питания через диод VD1 до напряжения +12В. Когда транзистор VT2 закроется, будет закрыт и диод VD1, но запаса энергии в конденсаторе C1 достаточно для срабатывания микросхемы DA1 в следующем цикле. Для осуществления гальванической развязки от контролера и между собой управление верхними ключами приходится осуществлять через оптрон U1.
Такой способ питания позволяет избавиться от усложнения блока питания, обойтись всего одним напряжением. В противном случае потребовались бы три изолированных обмотки на трансформаторе, три выпрямителя и три стабилизатора. Более подробно с таким способом питания можно ознакомиться в описаниях специализированных микросхем.
Борис Аладышкин, http://electrik. info
info
Широтно-импульсная модуляция (ШИМ) – это метод преобразования сигнала, при котором изменяется длительность импульса (скважность), а частота остаётся константой. В английской терминологии обозначается как PWM (pulse-width modulation). В данной статье подробно разберемся, что такое ШИМ, где она применяется и как работает.
Область применения
С развитием микроконтроллерной техники перед ШИМ открылись новые возможности. Этот принцип стал основой для электронных устройств, требующих, как регулировки выходных параметров, так и поддержания их на заданном уровне. Метод широтно-импульсной модуляции применяется для изменения яркости света, скорости вращения двигателей, а также в управлении силовым транзистором блоков питания (БП) импульсного типа.
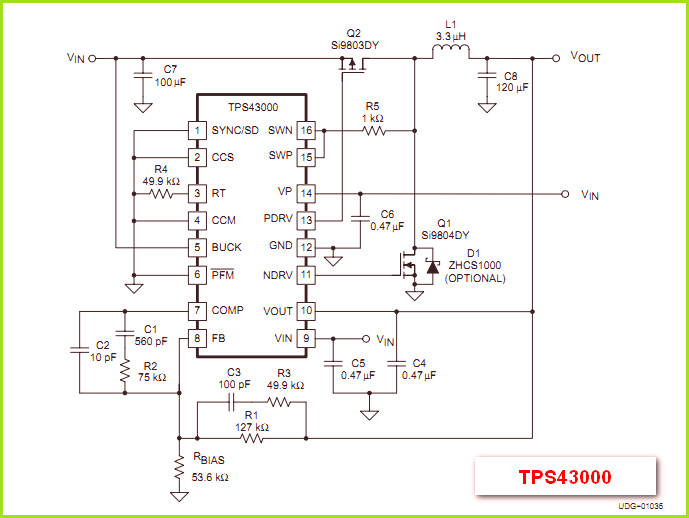
Широтно-импульсная (ШИ) модуляция активно используется в построении систем управления яркостью светодиодов. Благодаря низкой инерционности, светодиод успевает переключаться (вспыхивать и гаснуть) на частоте в несколько десятков кГц. Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана .
Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана .
Подаваемое на вход микросхемы драйвера сетевое напряжение постоянно сравнивается с внутрисхемным опорным напряжением, формируя на выходе сигнал ШИМ (ЧИМ), параметры которого задаются внешними резисторами. Некоторые микросхемы имеют вывод для подачи аналогового или цифрового сигнала управления. Таким образом, работой импульсного драйвера можно управлять с помощью другого ШИ-преобразователя. Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Масштабное применение ШИМ отражено во всех LCD панелях со светодиодной подсветкой. К сожалению, в LED мониторах большая часть ШИ-преобразователей работает на частоте в сотни Герц, что негативно отражается на зрении пользователей ПК.
Микроконтроллер Ардуино тоже может функционировать в режиме ШИМ контроллера. Для этого следует вызвать функцию AnalogWrite() с указанием в скобках значения от 0 до 255. Ноль соответствует 0В, а 255 – 5В. Промежуточные значения рассчитываются пропорционально.
Повсеместное распространение устройств, работающих по принципу ШИМ, позволило человечеству уйти от трансформаторных блоков питания линейного типа. Как результат – повышение КПД и снижение в несколько раз массы и размеров источников питания.
ШИМ-контроллер является неотъемлемой частью современного импульсного блока питания.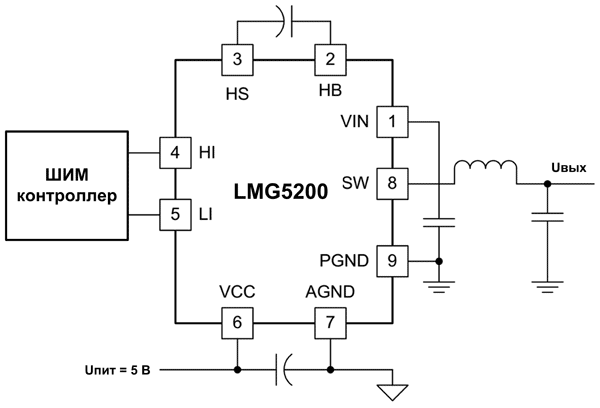 Он управляет работой силового транзистора, расположенного в первичной цепи импульсного трансформатора. За счёт наличия цепи обратной связи напряжение на выходе БП всегда остаётся стабильным. Малейшее отклонение выходного напряжения через обратную связь фиксируется микросхемой, которая мгновенно корректирует скважность управляющих импульсов. Кроме этого современный ШИМ-контроллер решает ряд дополнительных задач, способствующих повышению надёжности источника питания:
Он управляет работой силового транзистора, расположенного в первичной цепи импульсного трансформатора. За счёт наличия цепи обратной связи напряжение на выходе БП всегда остаётся стабильным. Малейшее отклонение выходного напряжения через обратную связь фиксируется микросхемой, которая мгновенно корректирует скважность управляющих импульсов. Кроме этого современный ШИМ-контроллер решает ряд дополнительных задач, способствующих повышению надёжности источника питания:
- обеспечивает режим плавного пуска преобразователя;
- ограничивает амплитуду и скважность управляющих импульсов;
- контролирует уровень входного напряжения;
- защищает от короткого замыкания и превышения температуры силового ключа;
- при необходимости переводит устройство в дежурный режим.
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов. Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства. Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Пример использования ШИМ регулятора
Один из вариантов реализации ШИМ простого регулятора уже описывался ранее в . Он построен на базе микросхемы и имеет небольшую обвязку. Но, несмотря на простату схемы, регулятор имеет довольно широкую область применения: схемы управления яркости светодиодов, светодиодных лент, регулировка скорость вращения двигателей постоянного тока.
Читайте так же
Широтно — импульсные регуляторы постоянного тока
Необходимость регулировки постоянного напряжения для
питания мощных инерционных нагрузок чаще всего возникает у владельцев
автомобилей и другой авто-мото техники. Например, появилось
желание плавно менять яркость ламп освещения салона, габаритных
огней, автомобильных фар или вышел из строя узел регулирования
оборотов вентилятора автомобильного кондиционера, а замены нет.
Осуществить такое желание иногда нет возможности из-за большого тока
потребления этими устройствами — если устанавливать транзисторный
регулятор напряжения, компенсационный или параметрический, на регулирующем
транзисторе будет выделяться очень большая мощность, что потребует установки
больших радиаторов или введения принудительного охлаждения с помощью
малогабаритного вентилятора от компьютерных устройств. Выходом из
положения является применение широтно — импульсных схем, управляющих
мощными полевыми силовыми транзисторами
MOSFET
.
Эти транзисторы могут коммутировать очень большие токи (до 160А и более)
при напряжении на затворе 12 — 15 В. Сопротивление открытого транзистора
очень мало, что позволяет заметно снизить рассеиваемую мощность. Схемы
управления должны обеспечивать разность напряжений между затвором и истоком не
менее 12 .
Например, появилось
желание плавно менять яркость ламп освещения салона, габаритных
огней, автомобильных фар или вышел из строя узел регулирования
оборотов вентилятора автомобильного кондиционера, а замены нет.
Осуществить такое желание иногда нет возможности из-за большого тока
потребления этими устройствами — если устанавливать транзисторный
регулятор напряжения, компенсационный или параметрический, на регулирующем
транзисторе будет выделяться очень большая мощность, что потребует установки
больших радиаторов или введения принудительного охлаждения с помощью
малогабаритного вентилятора от компьютерных устройств. Выходом из
положения является применение широтно — импульсных схем, управляющих
мощными полевыми силовыми транзисторами
MOSFET
.
Эти транзисторы могут коммутировать очень большие токи (до 160А и более)
при напряжении на затворе 12 — 15 В. Сопротивление открытого транзистора
очень мало, что позволяет заметно снизить рассеиваемую мощность. Схемы
управления должны обеспечивать разность напряжений между затвором и истоком не
менее 12 . .. 15 В, в противном случае сопротивление канала сильно увеличивается
и рассеиваемая мощность значительно возрастает, что может привести
перегреву транзистора и выходу его из строя. Для широтно —
импульсных автомобильных низковольтных регуляторов
выпускаются специализированные микросхемы, например U
6080B
… U6084B
, L9610, L9611,
которые содержат узел повышения выходного напряжения до 25 -30 В при
напряжении питания 7 -14 В, что позволяет включать выходной транзистор по
схеме с общим стоком, чтобы можно было подключать нагрузку с общим
минусом, но достать их практически невозможно. Для большинства нагрузок,
которые потребляют ток не более 10А и не могут вызвать просадку бортового
напряжения можно использовать простые схемы без дополнительного узла повышения
напряжения. Такие схемы рассмотрены в этом разделе.
.. 15 В, в противном случае сопротивление канала сильно увеличивается
и рассеиваемая мощность значительно возрастает, что может привести
перегреву транзистора и выходу его из строя. Для широтно —
импульсных автомобильных низковольтных регуляторов
выпускаются специализированные микросхемы, например U
6080B
… U6084B
, L9610, L9611,
которые содержат узел повышения выходного напряжения до 25 -30 В при
напряжении питания 7 -14 В, что позволяет включать выходной транзистор по
схеме с общим стоком, чтобы можно было подключать нагрузку с общим
минусом, но достать их практически невозможно. Для большинства нагрузок,
которые потребляют ток не более 10А и не могут вызвать просадку бортового
напряжения можно использовать простые схемы без дополнительного узла повышения
напряжения. Такие схемы рассмотрены в этом разделе.
Первый ШИМ регулятор собран на
инверторах логической КМОП
микросхемы. Схема представляет собой генератор прямоугольных
импульсов на двух логических элементах, в котором за счёт диодов
раздельно меняется постоянная времени заряда и разряда
частотозадающего конденсатора, что позволяет изменять скважность
выходных импульсов и значение эффективного напряжения на нагрузке. В схеме можно использовать любые инвертирующие КМОП элементы, например
К176ПУ2, К561ЛН1, а также любые элементы И, ИЛИ-НЕ, например
К561ЛА7, К561ЛЕ5 и подобные, соответственно сгруппировав их входы.
Полевой транзистор может быть любым из
MOSFET
,
которые выдерживают максимальный ток нагрузки, но желательно
использовать транзистор с как можно большим максимальным током, т.к. у
него меньшее сопротивление открытого канала, что уменьшает рассеиваемую
мощность и позволяет использовать радиатор меньшей площади.
Достоинство схемы — простота и доступность элементов, недостатки — диапазон изменения выходного напряжения чуть
меньше 100% и невозможно доработать схему с целью
введения дополнительных режимов, например плавного автоматического
увеличения или понижения напряжения на нагрузке, т.к. регулирование производится путём изменения
сопротивления переменного резистора, а не изменением уровня
управляющего напряжения.
В схеме можно использовать любые инвертирующие КМОП элементы, например
К176ПУ2, К561ЛН1, а также любые элементы И, ИЛИ-НЕ, например
К561ЛА7, К561ЛЕ5 и подобные, соответственно сгруппировав их входы.
Полевой транзистор может быть любым из
MOSFET
,
которые выдерживают максимальный ток нагрузки, но желательно
использовать транзистор с как можно большим максимальным током, т.к. у
него меньшее сопротивление открытого канала, что уменьшает рассеиваемую
мощность и позволяет использовать радиатор меньшей площади.
Достоинство схемы — простота и доступность элементов, недостатки — диапазон изменения выходного напряжения чуть
меньше 100% и невозможно доработать схему с целью
введения дополнительных режимов, например плавного автоматического
увеличения или понижения напряжения на нагрузке, т.к. регулирование производится путём изменения
сопротивления переменного резистора, а не изменением уровня
управляющего напряжения.
Гораздо лучшими характеристиками обладает вторая схема, но количество
элементов в ней чуть больше. Регулировка эффективного значения
напряжения на нагрузке от 0 до 12 В производится изменением
напряжения на управляющем входе от 8 до 12 В. Диапазон
регулировки напряжения практически 100%. Максимальный
ток нагрузки полностью определяется типом силового полевого
транзистора и может быть очень значительным. Так как выходное напряжение
пропорционально входному управляющему напряжению, схема может
использоваться как составная часть системы регулирования,
например системы поддержания заданной температуры, если в
качестве нагрузки использовать нагреватель, а датчик
температуры подключить к простейшему пропорциональному регулятору, выход
которого подключается к управляющему входу устройства. Описанные
устройства имеют в основе несимметричный мультивибратор, но ШИМ
регулятор можно построить на микросхеме ждущего мультивибратора, как
показано на следующей странице.
Регулировка эффективного значения
напряжения на нагрузке от 0 до 12 В производится изменением
напряжения на управляющем входе от 8 до 12 В. Диапазон
регулировки напряжения практически 100%. Максимальный
ток нагрузки полностью определяется типом силового полевого
транзистора и может быть очень значительным. Так как выходное напряжение
пропорционально входному управляющему напряжению, схема может
использоваться как составная часть системы регулирования,
например системы поддержания заданной температуры, если в
качестве нагрузки использовать нагреватель, а датчик
температуры подключить к простейшему пропорциональному регулятору, выход
которого подключается к управляющему входу устройства. Описанные
устройства имеют в основе несимметричный мультивибратор, но ШИМ
регулятор можно построить на микросхеме ждущего мультивибратора, как
показано на следующей странице.
С аналоговым интегральным таймером SE555/NE555 (КР1006), выпускаемым компанией Signetics Corporation с далекого 1971 года прекрасно знакомо большинство советских и зарубежных радиолюбителей. Трудно перечислить, для каких только целей не использовалась эта недорогая, но многофункциональная микросхема за почти полувековой период своего существования. Однако, даже несмотря на быстрое развитие электронной промышленности в последние годы, она по-прежнему продолжает пользоваться популярностью и выпускается в значительных объемах.
Трудно перечислить, для каких только целей не использовалась эта недорогая, но многофункциональная микросхема за почти полувековой период своего существования. Однако, даже несмотря на быстрое развитие электронной промышленности в последние годы, она по-прежнему продолжает пользоваться популярностью и выпускается в значительных объемах.
Предлагаемая Jericho Uno простенькая схемка автомобильного ШИМ-регулятора – не профессиональная, полностью отлаженная разработка, отличающаяся своей безопасностью и надежностью. Это всего лишь небольшой дешевый эксперимент, собранный на доступных бюджетных деталях и вполне удовлетворяющий минимальным требованиям. Поэтому его разработчик не берет на себя ответственности за все то, что может произойти с вашим оборудованием при эксплуатации смоделированной схемы.
Схема ШИМ регулятор на NE555
Для создания ШИМ-устройства вам понадобится:- электропаяльник;
- микросхема NE555;
- переменный резистор на 100 кОм;
- резисторы на 47 Ом и 1 кОм по 0,5W;
- конденсатор на 0,1 мкФ;
- два диода 1N4148 (КД522Б).


Пошаговая сборка аналоговой схемы
Построение цепи начинаем с установки перемычек на микросхему. Используя паяльник, замыкаем между собой следующие контакты таймера: 2 и 6, 4 и 8.Дальше, руководствуясь направлением движения электронов, распаиваем на переменном резисторе «плечи» диодного моста (проход тока в одну сторону). Номиналы диодов подобраны из имеющихся в наличие, недорогих. Можно заменить их любыми другими – это практически не повлияет на работу схемы.
Во избежание короткого замыкания и перегорания микросхемы при выкручивании переменного резистора в крайнее положение, ставим по питанию шунтирующее сопротивление в 1 кОм (контакты 7-8).
Поскольку NE555 выступает в роли генератора пилы, для получения схемы с заданной частотой, длительностью импульса и паузой, осталось подобрать резистор и конденсатор. Неслышных 18 кГц нам даст конденсатор 4,7 нФ, но такое малое значение емкости вызовет перекос плеч при работе микросхемы. Ставим оптимальную в 0,1 мкФ (контакты 1-2).

Избежать противного «пищания» схемы и подтянуть выход к высокому уровню можно чем-то низкоомным, например резистором 47-51 Ом.
Осталось подключить питание и нагрузку. Схема рассчитана на входное напряжение бортовой сети автомобиля 12V постоянного тока, но для наглядной демонстрации вполне запустится и от 9V батареи. Подключаем ее на вход микросхемы, соблюдая полярность (плюс на 8 ножку, минус на 1 ножку).
Осталось разобраться с нагрузкой. Как видно из графика, при понижении переменным резистором выходного напряжения до 6V пила на выходе (ножки 1-3) сохранилась, то есть NE555 в данной схеме и генератор пилы и компаратор одновременно. Ваш таймер работает в а-стабильном режиме и имеет коэффициент заполнения меньше 50%.
Модуль выдерживает 6-9 А проходного постоянного тока, так что при минимальных потерях можно подключить к нему как светодиодную полосу в автомобиле, так и маломощный двигатель, который и дым развеет и лицо в жару обдует. Примерно так:
Или так:
Принцип работы ШИМ регулятора
Работа ШИМ регулятора достаточно проста. Таймер NE555 отслеживает напряжение на емкости С. При ее заряде до достижения максимума (полный заряд) происходит открывание внутреннего транзистора и появлению логического нуля на выходе. Далее емкость разряжается, что приводит к закрытию транзистора и приходу к выходу логической единицы. При полном разряде емкости происходит переключение системы и все повторяется. В момент заряда ток идет по одному плечу, а при разряде – по-другому. Переменным резистором мы меняем соотношение сопротивления плеч, автоматически понижая либо увеличивая напряжение на выходе. В схеме наблюдается частичное отклонение частоты, но в слышимый диапазон она не попадает.
Таймер NE555 отслеживает напряжение на емкости С. При ее заряде до достижения максимума (полный заряд) происходит открывание внутреннего транзистора и появлению логического нуля на выходе. Далее емкость разряжается, что приводит к закрытию транзистора и приходу к выходу логической единицы. При полном разряде емкости происходит переключение системы и все повторяется. В момент заряда ток идет по одному плечу, а при разряде – по-другому. Переменным резистором мы меняем соотношение сопротивления плеч, автоматически понижая либо увеличивая напряжение на выходе. В схеме наблюдается частичное отклонение частоты, но в слышимый диапазон она не попадает.Смотирте видео работы ШИМ регулятора
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.
Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет «воспринимать» среднее значение подводимой к нему энергии.
Грубо говоря, двигатель будет «воспринимать» среднее значение подводимой к нему энергии.
Существует много схем для генерации ШИМ сигнала. Одна из самых простых — это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
Напряжение питания схемы VCC может быть в диапазоне 5 — 16 Вольт. В качестве диодов VD1 — VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.
Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
VT1 — полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
Микросхемы ШИМ-контроллеров ON Semi для сетевых источников питания. Шим-контроллеры
Широтно-импульсная модуляция (ШИМ) – это метод преобразования сигнала, при котором изменяется длительность импульса (скважность), а частота остаётся константой. В английской терминологии обозначается как PWM (pulse-width modulation). В данной статье подробно разберемся, что такое ШИМ, где она применяется и как работает.
Область применения
С развитием микроконтроллерной техники перед ШИМ открылись новые возможности. Этот принцип стал основой для электронных устройств, требующих, как регулировки выходных параметров, так и поддержания их на заданном уровне. Метод широтно-импульсной модуляции применяется для изменения яркости света, скорости вращения двигателей, а также в управлении силовым транзистором блоков питания (БП) импульсного типа.
Широтно-импульсная (ШИ) модуляция активно используется в построении систем управления яркостью светодиодов.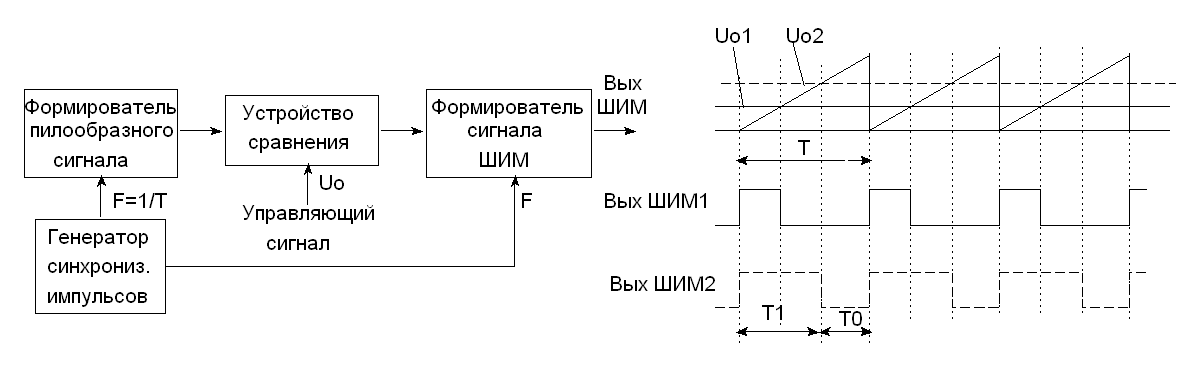 Благодаря низкой инерционности, светодиод успевает переключаться (вспыхивать и гаснуть) на частоте в несколько десятков кГц. Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана .
Благодаря низкой инерционности, светодиод успевает переключаться (вспыхивать и гаснуть) на частоте в несколько десятков кГц. Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана .
Подаваемое на вход микросхемы драйвера сетевое напряжение постоянно сравнивается с внутрисхемным опорным напряжением, формируя на выходе сигнал ШИМ (ЧИМ), параметры которого задаются внешними резисторами. Некоторые микросхемы имеют вывод для подачи аналогового или цифрового сигнала управления. Таким образом, работой импульсного драйвера можно управлять с помощью другого ШИ-преобразователя. Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Некоторые микросхемы имеют вывод для подачи аналогового или цифрового сигнала управления. Таким образом, работой импульсного драйвера можно управлять с помощью другого ШИ-преобразователя. Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Масштабное применение ШИМ отражено во всех LCD панелях со светодиодной подсветкой. К сожалению, в LED мониторах большая часть ШИ-преобразователей работает на частоте в сотни Герц, что негативно отражается на зрении пользователей ПК.
Микроконтроллер Ардуино тоже может функционировать в режиме ШИМ контроллера. Для этого следует вызвать функцию AnalogWrite() с указанием в скобках значения от 0 до 255. Ноль соответствует 0В, а 255 – 5В. Промежуточные значения рассчитываются пропорционально.
Повсеместное распространение устройств, работающих по принципу ШИМ, позволило человечеству уйти от трансформаторных блоков питания линейного типа.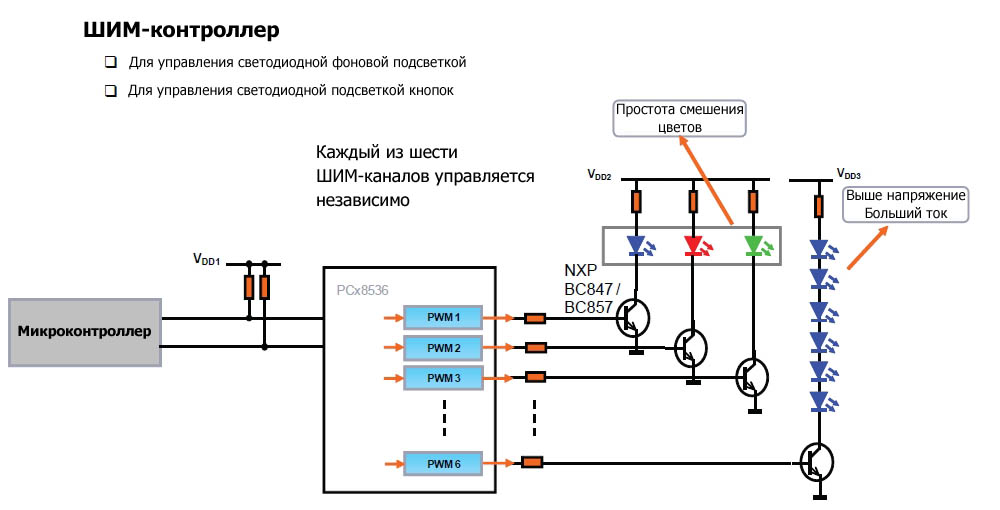 Как результат – повышение КПД и снижение в несколько раз массы и размеров источников питания.
Как результат – повышение КПД и снижение в несколько раз массы и размеров источников питания.
ШИМ-контроллер является неотъемлемой частью современного импульсного блока питания. Он управляет работой силового транзистора, расположенного в первичной цепи импульсного трансформатора. За счёт наличия цепи обратной связи напряжение на выходе БП всегда остаётся стабильным. Малейшее отклонение выходного напряжения через обратную связь фиксируется микросхемой, которая мгновенно корректирует скважность управляющих импульсов. Кроме этого современный ШИМ-контроллер решает ряд дополнительных задач, способствующих повышению надёжности источника питания:
- обеспечивает режим плавного пуска преобразователя;
- ограничивает амплитуду и скважность управляющих импульсов;
- контролирует уровень входного напряжения;
- защищает от короткого замыкания и превышения температуры силового ключа;
- при необходимости переводит устройство в дежурный режим.
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов. Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор).![]() На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства. Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Пример использования ШИМ регулятора
Один из вариантов реализации ШИМ простого регулятора уже описывался ранее в . Он построен на базе микросхемы и имеет небольшую обвязку. Но, несмотря на простату схемы, регулятор имеет довольно широкую область применения: схемы управления яркости светодиодов, светодиодных лент, регулировка скорость вращения двигателей постоянного тока.
Читайте так же
Современный рынок источников питания предлагает разработчику широкий выбор различных изделий электроники, каждое из которых в той или иной степени готово к решению поставленных перед инженерами задач. Данная статья имеет перед собой цель рассмотреть и помочь выбрать оптимальные решения из предложений наиболее известных игроков рынка импульсных источников питания.
Данная статья имеет перед собой цель рассмотреть и помочь выбрать оптимальные решения из предложений наиболее известных игроков рынка импульсных источников питания.
Введение
Раньше системам питания в функциональной схеме на этапе проектирования очень часто уделялось внимание уже на завершающей стадии, многие специалисты недооценивали их возможность по усовершенствованию изделия в целом. В последнее время тенденции развития электронной промышленности поставили на первый план перед разработчиками такие задачи, как уменьшение энергопотребления, массогабаритных характеристик, времени разработки и конечной стоимости изделия. Такие требования изменили некогда второстепенное отношение к узлам осуществления питания устройства, ведь во многом именно от них зависит способность конечного продукта быть конкурентоспособным, выдерживая жесткие требования рынка.
На сегодняшний день ведущие позиции в этой области традиционно занимает компания Power Integration. Продукция этой фирмы хорошо известна, технология применения многократно отработана, что и является фактором, который перевешивает чашу весов в ее сторону.
В качестве конкурирующих продуктов рассмотрим предложение в области источников питания от компании Fairchild Semiconductor. Эта компания уже давно зарекомендовала себя в области силовой электроники, предлагая недорогие, качественные и многофункциональные решения. Как правило, продукция этого производителя ориентирована на области, требующие высокой степени надежности и производительности.
Источники питания
Фактически все изделия электронной промышленности нуждаются в питании постоянным током от аккумуляторной батареи или источника питания. Помимо того, большинство приборов имеет повышенные требования к его качеству. Напряжение необходимо регулировать и защищать от возникающих пульсаций. Всего существует три типа силовых преобразователей:
- DC\DC-конвертер;
- AC\DC-источник питания;
- DC\AC-инвертор.
Идеальный источник должен формировать требуемые значения напряжений, несмотря на изменение окружающей температуры, нагрузки или входного напряжения. При этом он должен обладать 100%-ной эффективностью. На рис. 1 можно увидеть недостатки реального источника питания.
При этом он должен обладать 100%-ной эффективностью. На рис. 1 можно увидеть недостатки реального источника питания.
Рис. 1. Реальный источник питания
На сегодняшний день существуют линейные и . Импульсное преобразование интересно из-за высокой эффективности и удельной мощности. В таблице сравниваются некоторые из основных особенностей линейных и импульсных источников питания. Стабильность по напряжению и току обычно лучше у линейных источников питания, иногда на порядок, но в импульсных источниках питания часто используются линейные выходные стабилизаторы, улучшающие параметры выходного напряжения.
Таблица. Сравнение импульсных и линейных источников питания
Наконец, импульсные источники питания имеют более широкий диапазон входных напряжений. Диапазон входных напряжений линейных источников питания обычно не превышает 10% от номинального значения, что оказывает прямое влияние на КПД. У импульсных источников влияние изменения величины входного напряжения на КПД очень незначительное или вообще отсутствует, а широкий рабочий диапазон входных напряжений дает возможность работать при сильных изменениях напряжения сети (до 40%).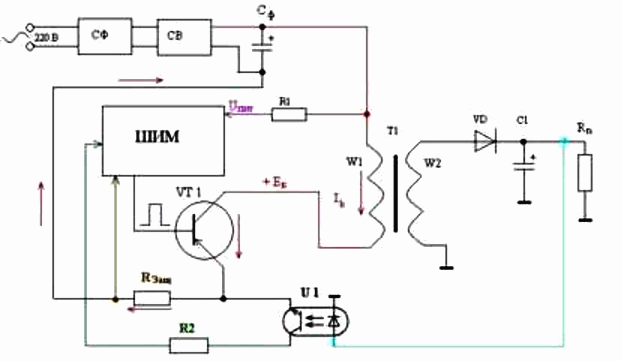 Наиболее часто применяемой (благодаря своим достоинствам) является схема обратноходового преобразователя (рис. 2). Разработано множество микросхем управления данными преобразователями. Существуют как микросборки, использующие внешний силовой транзистор, так и включающие силовой элемент в свой состав, что уменьшает его габариты.
Наиболее часто применяемой (благодаря своим достоинствам) является схема обратноходового преобразователя (рис. 2). Разработано множество микросхем управления данными преобразователями. Существуют как микросборки, использующие внешний силовой транзистор, так и включающие силовой элемент в свой состав, что уменьшает его габариты.
Рис. 2. Схема обратноходового преобразователя с согласующим трансформатором и гальванической развязкой
В недалеком прошлом реализация метода широтно-импульсной модуляции и контроля характеристик осуществлялась за счет дискретных элементов. Появление интегральных схем, берущих на себя эти функции, намного упростило процесс разработки и в несколько раз уменьшило габаритные размеры источников питания (рис. 3). Лидерами в производстве интегральных схем управления источниками питания являются компании Power Integrations и Fairchild Semiconductor.
Рис. 3. Эволюция источников питания
Регуляторы напряжения компании Power Integrations
Один из используемых подходов, позволяющих существенно сократить потери на нагревании силовых компонентов радиосхем, представляет собой использование переключательных режимов работы установок. При подобных системах электросиловой компонент или раскрыт — в это время на нем наблюдается фактически нулевое падение напряжения, или открыт — в это время на него подается нулевой ток. Рассеиваемую мощность можно вычислить, перемножив показатели силы тока и напряжения. В этом режиме получается достичь коэффициента полезного действия около 75-80% и более.
При подобных системах электросиловой компонент или раскрыт — в это время на нем наблюдается фактически нулевое падение напряжения, или открыт — в это время на него подается нулевой ток. Рассеиваемую мощность можно вычислить, перемножив показатели силы тока и напряжения. В этом режиме получается достичь коэффициента полезного действия около 75-80% и более.
Что такое ШИМ?
Для получения на выходе сигнала требуемой формы силовой ключ должен открываться всего лишь на определенное время, пропорциональное вычисленным показателям выходного напряжения. В этом и заключается принцип широтно-импульсной модуляции (ШИМ, PWM). Далее сигнал такой формы, состоящий из импульсов, разнящихся по своей ширине, поступает в область фильтра на основе дросселя и конденсатора. После преобразования на выходе будет практически идеальный сигнал требуемой формы.
Область применения ШИМ не ограничивается импульсными стабилизаторами и преобразователями напряжения. Использование данного принципа при проектировании мощного усилителя звуковой частоты дает возможность существенно снизить потребление устройством электроэнергии, приводит к миниатюризации схемы и оптимизирует систему теплоотдачи. К недостаткам можно причислить посредственное качество сигнала на выходе.
К недостаткам можно причислить посредственное качество сигнала на выходе.
Формирование ШИМ-сигналов
Создавать ШИМ-сигналы нужной формы достаточно трудно. Тем не менее индустрия сегодня может порадовать замечательными специальными микросхемами, известными как ШИМ-контроллеры. Они недорогие и целиком решают задачу формирования широтно-импульсного сигнала. Сориентироваться в устройстве подобных контроллеров и их использовании поможет ознакомление с их типичной конструкцией.
Стандартная схема контроллера ШИМ предполагает наличие следующих выходов:
- Общий вывод (GND). Он реализуется в виде ножки, которая подключается к общему проводу схемы питания устройства.
- Вывод питания (VC). Отвечает за электропитание схемы. Важно не спутать его с соседом с похожим названием — выводом VCC.
- Вывод контроля питания (VCC). Как правило, чип контроллера ШИМ принимает на себя руководство силовыми транзисторами (биполярными либо полевыми). В случае если напряжение на выходе снизится, транзисторы станут открываться лишь частично, а не целиком. Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.
 Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.
Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.Выходное управляющее напряжение (OUT)
Количество выводов микросхемы определяется её конструкцией и принципом работы. Не всегда удается сразу разобраться в сложных терминах, но попробуем выделить суть. Существуют микросхемы на 2-х выводах, управляющие двухтактными (двухплечевыми) каскадами (примеры: мост, полумост, 2-тактный обратный преобразователь). Существуют и аналоги ШИМ-контроллеров для управления однотактными (одноплечевыми) каскадами (примеры: прямой/обратный, повышающий/понижающий, инвертирующий).
Помимо этого, выходной каскад может быть по строению одно- и двухтактным.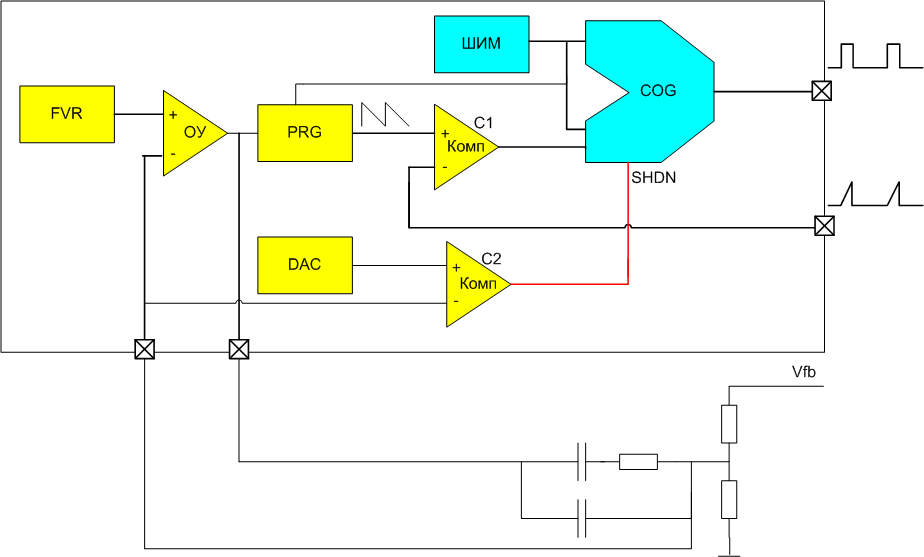 Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей «затвор — исток» и «затвор — сток». Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей «затвор — исток» и «затвор — сток». Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
ШИМ-контроллеры для источников питания большой мощности могут иметь также элементы управления выходным ключом (драйверы). В качестве выходных ключей рекомендуется использовать IGBT-транзисторы.
Основные проблемы ШИМ-преобразователей
При работе любого устройства полностью исключить вероятность поломки невозможно, и преобразователей это тоже касается. Сложность конструкции при этом не имеет значения, проблемы в эксплуатации может вызвать даже известный ШИМ-контроллер TL494. Неисправности имеют различную природу — некоторые из них можно выявить на глаз, а для обнаружения других требуется специальное измерительное оборудование.
Чтобы ШИМ-контроллер, следует ознакомится со списком основных неисправностей приборов, а лишь позже — с вариантами их устранения.
Диагностика неисправностей
Одна из часто встречающихся проблем — пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра.
Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
- Контроллер глохнет после старта — обрыв петли ОС, перепад по току, проблемы с конденсатором на выходе фильтра (если таковой имеется), драйвером; возможно, разладилось управление ШИМ-контроллером. Надо осмотреть устройство на предмет сколов и деформаций, замерить показатели нагрузки и сравнить их с типовыми.
- ШИМ-контроллер не стартует — отсутствует одно из входных напряжений или устройство неисправно. Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
- Напряжение на выходе отличается от номинального — проблемы с петлей ООС или с контроллером.
- После старта ШИМ на БП уходит в защиту при отсутствии КЗ на ключах — некорректная работа ШИМ или драйверов.
- Нестабильная работа платы, наличие странных звуков — обрыв петли ООС или цепочки RC, деградация емкости фильтра.
 Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.В заключение
Универсальные и многофункциональные ШИМ-контроллеры сейчас можно встретить практически везде. Они служат не только в качестве неотъемлемой составляющей блоков питания большинства современных устройств — типовых компьютеров и других повседневных девайсов. На основе контроллеров разрабатываются новые технологии, позволяющие существенно сократить расход ресурсов во многих отраслях человеческой деятельности. Владельцам частных домов пригодятся контроллеры заряда аккумуляторов от фотоэлектрических батарей, основанные на принципе широтно-импульсной модуляции тока заряда.
Высокий коэффициент полезного действия делает разработку новых устройств, действие которых основывается на принципе ШИМ, весьма перспективной. Вторичные источники питания — вовсе не единственное направление деятельности.
В схемотехнике современных импульсных источников питания (ИИП) приобрели широкую популярность ШИМ-регуляторы, выполненные в малогабаритных планарных корпусах с шестью выводами. Обозначение типа корпуса может быть SOT-23-6, SOT-23-6L, SOT-26, TSOP-6, SSOT-6. Внешний вид и расположение выводов показаны на рисунке ниже. В данном случае на левом фрагменте картинки представлена кодовая маркировка LD7530A
Назначение выводов:
1 — GND. (Общий провод).
2 — FB. (FeedBack — Обратная Связь). Вход для управления длительностью импульсов сигналом с выходного напряжения. Иногда может иметь обозначение COMP (входной компаратор).
3 — RI/RT/CT/COMP/NC — В зависимости от типа микросхемы, может быть задействован для частотозадающей RC цепи (RI/RT/CT), либо для организации защиты, как вход компаратора отключения ШИМ при пороговом значение на его входе, указанном в документе. В некоторых типах микросхем этот вход может быть никак не задействован (NC — No Connect).
В некоторых типах микросхем этот вход может быть никак не задействован (NC — No Connect).
4 — SENSE, по другому CS (Current Sense) — Вход с датчика тока в истоке ключа.
5 — VCC — Вход напряжения питания и запуска микросхемы.
6 — OUT (GATE) — Выход для управления затвором (Gate) ключа.
Функционально подобные регуляторы работают по принципу популярных ранее микросхем ШИМ серии xx384x, которые хорошо зарекомендовали себя в плане надёжности и устойчивости.
Некоторые затруднения часто возникают при замене или выборе аналога для подобных ШИМ-регуляторов по причине применения кодовой маркировки в обозначении типа микросхем. Ситуация осложняется большим количеством производителей компонентов, которые не всегда предоставляют документацию в массовый доступ, так же не все производители готовых устройств снабжают схемами ремонтные сервисные центры, поэтому реальные схемные решения ремонтникам часто приходится изучать по установленным компонентам и монтажным соединениям непосредственно на плате.
В практике часто встречаются микросхемы ШИМ и кодом маркировки EAxxx и Eaxxx. Официальной документации на них не найдено в свободном доступе, но сохранились обсуждения на форумах и кусочки картинок из PDF от System General, которая публикует их как SG6848T и SG6848T2. Рисунок прилагается.
Вниманию мастеров предлагаем таблицы, составленные из доступной в интернете информации и документов PDF для подбора аналогов при замене наиболее распространённых шестиногих планарных ШИМ c цоколёвкой выводов: pin1 — GND, pin2 — FB (COMP), pin4 — Sense, pin5 — Vcc, pin6 — OUT.
Основным их различием является применение и назначение вывода 3.
ШИМ-регуляторы (PWM), без использования вывода 3.
| Name | Part Namber | Diler | Marking |
|---|---|---|---|
| SG6849 | SG684965TZ | Fairchild / ON Semi | BBxx |
| SG6849 | SG6849-65T, SG6849-65TZ | System General | MBxx EBxx |
| SGP400 | SGP400TZ | System General | AAKxx |
ШИМ-регуляторы (PWM) с установкой резистора 95-100 kOhm на вывод 3.
Применяя перечисленные ниже ШИМ, частоту следует установить резистором RT (RI) от вывода 3 на землю. Обычно его номинал выбирается 95-100 kOhm для частоты 65-100 KHz. Более точно смотрите в прилагаемой документации. Файлы PDF упакованы в RAR.
| Name | Part Namber | Diler | Marking |
|---|---|---|---|
| AP3103A | AP3103AKTR-G1 | Diodes Incorporated | GHL |
| AP8263 | AP8263E6R, A8263E6VR | AiT Semiconductor | S1xx |
| AT3263 | AT3263S6 | ATC Technology | 3263 |
| CR6848 | CR6848S | Chip-Rail | 848h26 |
| CR6850 | CR6850S | Chip-Rail | 850xx |
| CR6851 | CR6851S | Chip-Rail | 851xx |
| FAN6602R | FAN6602RM6X | Fairchild / ON Semi | ACCxx |
| FS6830 | FS6830 | FirstSemi | |
| GR8830 | GR8830CG | Grenergy | 30xx |
| GR8836 | GR8836C, GR8836CG | Grenergy | 36xx |
| H6849 | H6849NF | HI-SINCERITY | |
| H6850 | H6850NF | HI-SINCERITY | |
| HT2263 | HT2263MP | HOT-CHIP | 63xxx |
| KP201 | Kiwi Instruments | ||
| LD5530 | LD5530GL LD5530R | Leadtrand | xxt30 xxt30R |
| LD7531 | LD7531GL, LD7531PL | Leadtrend | xxP31 |
| LD7531A | LD7531AGL | Leadtrend | xxP31A |
| LD7535/A | LD7535BL, LD7535GL, LD7535ABL, LD7535AGL | Leadtrend | xxP35-xxx35A |
| LD7550 | LD7550BL, LD7550IL | Leadtrend | xxP50 |
| LD7550B | LD7550BBL, LD7550BIL | Leadtrend | xxP50B |
| LD7551 | LD7551BL/IL | Leadtrend | xxP51 |
| LD7551C | LD7551CGL | Leadtrend | xxP51C |
| NX1049 | XN1049TP | Xian-Innuovo | 49xxx |
| OB2262 | OB2262MP | On-Bright-Electronics | 62xx |
| OB2263 | OB2263MP | On-Bright-Electronics | 63xx |
| PT4201 | PT4201E23F | Powtech | 4201 |
| R7731 | R7731GE/PE | Richtek | 0Q= |
| R7731A | R7731AGE | Richtek | IDP=xx |
| SD4870 | SD4870TR | Silan Microelectronics | 4870 |
| SF1530 | SF1530LGT | SiFirst | 30xxx |
| SG5701 | SG5701TZ | System General | AAExx |
| SG6848 | SG6848T, SG6848T1, SG6848TZ1, SG6848T2 | Fairchild / ON Semi | AAHxx EAxxx |
| SG6858 | SG6858TZ | Fairchild / ON Semi | AAIxx |
| SG6859A | SG6859ATZ, SG6859ATY | Fairchild / ON Semi | AAJFxx |
| SG6859 | SG6859TZ | Fairchild / ON Semi | AAJMxx |
| SG6860 | SG6860TY | Fairchild | AAQxx |
| SP6850 | SP6850S26RG | Sporton Lab | 850xx |
| SP6853 | SP6853S26RGB, SP6853S26RG | Sporton Lab | 853xx |
| SW2263 | SW2263MP | SamWin | |
| UC3863/G | UC3863G-AG6-R | Unisonic Technologies Co | U863 U863G |
ШИМ-регуляторы, в которых вывод 3 используется иначе.
При использовании перечисленных ниже ШИМ (PWM-контроллеров) следует обратить внимание на вывод 3, который может использоваться для организации защиты — тепловой или от превышения входного напряжения.
Частота может быть фиксированной 65kHz, либо устанавливаться номиналом конденсатора на выводе 3.
При замене любых микросхем на аналоги внимательно изучайте документацию. Файлы PDF упакованы в архив RAR.
| Name | Part Namber | Diler | Marking |
|---|---|---|---|
| AP3105/V/L/R | AP3105KTR-G1, AP3105VKTR-G1, AP3105LKTR-G1, AP3105RKTR-G1 | Diodes Incorporated | GHN GHO GHP GHQ |
| AP3105NA/NV/NL/NR | AP3105NAKTR-G1, AP3105NVKTR-G1, AP3105NLKTR-G1, AP3105NRKTR-G1 | Diodes Incorporated | GKN GKO GKP GKQ |
| AP3125A/V/L/R | AP3125AKTR-G1, AP3125VKTR-G1, AP3125LKTR-G1, AP3125RKTR-G1 | Diodes Incorporated | GLS GLU GNB GNC |
| AP3125B | AP3125BKTR-G1 | Diodes Incorporated | GLV |
| AP3125HA/HB | AP3125HAKTR-G1, AP3125HBKTR-G1 | Diodes Incorporated | GNP GNQ |
Чем питается ноутбук: схемотехника, принцип работы и неисправности.
 Часть 1 — что такое ШИМ | MagZip
Часть 1 — что такое ШИМ | MagZipМатеринская плата ноутбука состоит из нескольких модулей: процессор, мосты, память, видеоподсистема и т.п. Каждый модуль требует для себя отдельного, качественного питания: стабильного, достаточной мощности и без помех. Как мы знаем ноутбук запитывается от внешнего блока питания или от встроенного аккумулятора.
Блок питания обычно выдает 19В, батарея в зависимости от модели от +7 до +17 Вольт, а различные части ноутбука питаются от значительно меньших напряжений: 1,5 1,8 3,3 5 Вольт и других значений. Давайте рассмотрим типовую схему DC-DC (из постоянного в постоянное) преобразования напряжения посредством широтно-импульсного модулирования (ШИМ или PWM).
Схема как правило содержит микросхему управления (PWM контроллер или ШИМку), два полевых (MOSFET) транзистора, дроссель, конденсатор и обвязку обратной связи.
Принцип работы состоит в том, что драйвер (ШИМ контроллер) очень быстро открывает ключи Т1 и Т2. В момент открытия Т1, Т2 закрыт и напряжение B+ (на картинке +12В, в ноуте оно равно от +7 до 19В) начинает заряжать конденсатор С через дроссель L в котором при протекании тока возникает ЭДС.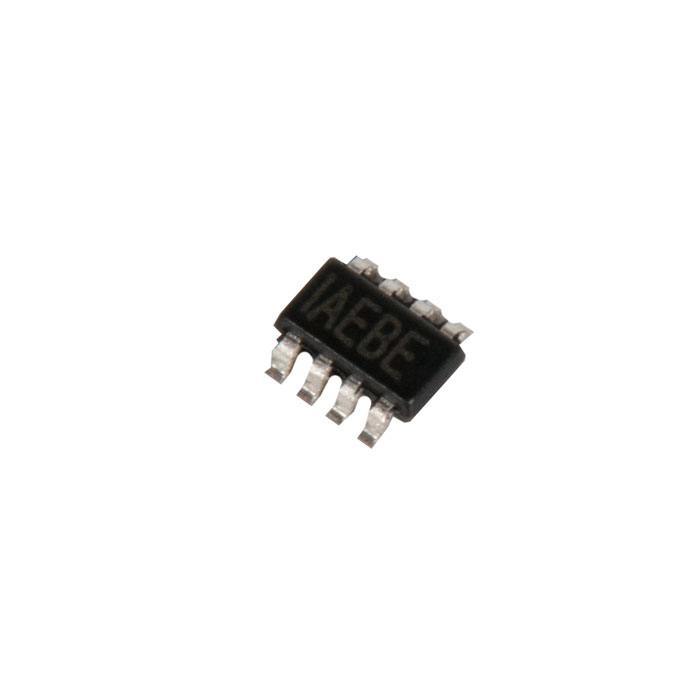 Далее ШИМка закрывает Т1 и открывает Т2, теперь источником питания становится LC цепочка, которая через Т2 замыкается на цепь нагрузки. По законам физики Выходное напряжение схемы зависит от величин LC цепочки и от скважности импульсов, которые закрывают/открывают транзисторы, т.е. зная значения LC и подавая нужные импульсы на транзисторы можно получить на выходе стабильное напряжение, необходимой величины. На рисунке не обозначены элементы обратной связи, которые позволяют PWM контроллеру «наблюдать» за выходным напряжением, чтобы вовремя изменить скважность импульсов, стабилизируя выходное напряжение. Также зачастую ШИМке по спец шине данных задают нужное напряжение и ШИМка в ответ дает PowerGood, сигнализируя, что все в порядке с питанием вверенной ей схеме.
Далее ШИМка закрывает Т1 и открывает Т2, теперь источником питания становится LC цепочка, которая через Т2 замыкается на цепь нагрузки. По законам физики Выходное напряжение схемы зависит от величин LC цепочки и от скважности импульсов, которые закрывают/открывают транзисторы, т.е. зная значения LC и подавая нужные импульсы на транзисторы можно получить на выходе стабильное напряжение, необходимой величины. На рисунке не обозначены элементы обратной связи, которые позволяют PWM контроллеру «наблюдать» за выходным напряжением, чтобы вовремя изменить скважность импульсов, стабилизируя выходное напряжение. Также зачастую ШИМке по спец шине данных задают нужное напряжение и ШИМка в ответ дает PowerGood, сигнализируя, что все в порядке с питанием вверенной ей схеме.
В настоящее время все чаще встречаются гибридные ШИМ контроллеры: это когда в корпус микросхемы интегрированы сам PWM контроллер и MOSFETы которыми он управляет.
Блок схема ШИМки SY8286
Кусок реальной схемы
У каждой ШИМки есть как минимум один сигнал Enable
Здесь их два. Первый разрешает включение импульсного преобразователя, второй разрешает работу линейного преобразователя (данная ШИМ имеет встроенный линейный стабилизатор LDO, выдающий +3V c максимальным током 400mA). В рассматриваемой схеме выход LDO используется для формирования слаботочных сигналов, например +3VLP подается на кнопку включения ноутбука.
Первый разрешает включение импульсного преобразователя, второй разрешает работу линейного преобразователя (данная ШИМ имеет встроенный линейный стабилизатор LDO, выдающий +3V c максимальным током 400mA). В рассматриваемой схеме выход LDO используется для формирования слаботочных сигналов, например +3VLP подается на кнопку включения ноутбука.
Таким образом, если отсутствует напряжение питания какой-либо части ноутбука, то делаем следующее:
1. Скачиваем схему и смотрим: какая ШИМ формирует данное напряжение и находим ее на плате и скачиваем даташит (копируем ее название в схеме, вставляем в поисковик Google и добавляем ключевое слово PDF).
2. Проверяем мультиметром наличие необходимых напряжений (для ШИМки указанной выше это 2,3,4,5 выводы и выводы включения EN1 и EN2)
3. Если отсутствуют EN1 и EN2 смотрим по схеме — какая микросхема их формирует и проверяем ее работоспособность или логику работы — может быть и так что по логике работы схемы этот кусок схемы не должен работать в текущий момент!
4.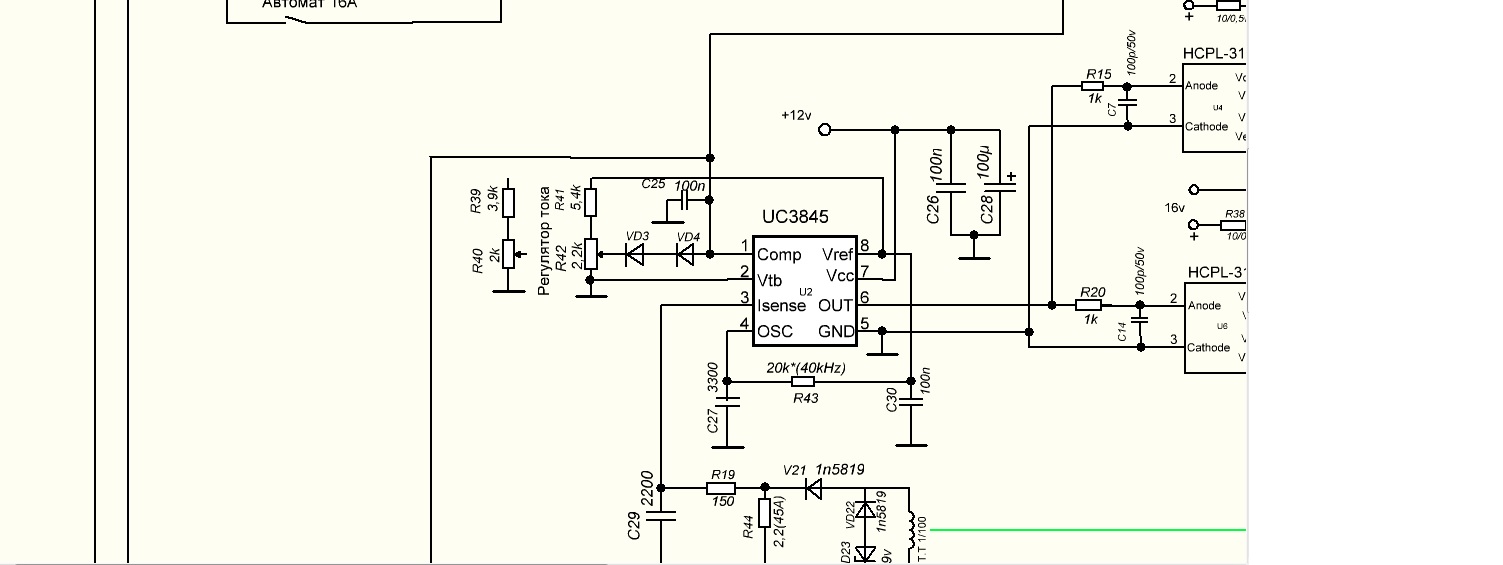 Если все необходимое для работы ШИМ присутствует и нет короткого замыкания в цепи ее нагрузки — то микросхема ШИМ подлежит замене
Если все необходимое для работы ШИМ присутствует и нет короткого замыкания в цепи ее нагрузки — то микросхема ШИМ подлежит замене
5. Если есть короткое замыкание на выходе LC цепочки — выясняем что его создает, отключая последовательно элементы, на которые подается формируемое ШИМкой напряжение.
ОБРАТИТЕ ВНИМАНИЕ! Если у вас не гибридный ШИМ и MOSFETы распаяны отдельно, то не в коем случае нельзя включать ноутбук при выпаянной ШИМ — в этом случае верхний транзистор может быть открыт и вся энергия блока питания или батареи с высоким напряжением будет направлена на «выжигание» элементов этой схемы!
Также хочу отметить, что мощные нагрузки типа процессора питаются большим током при малом напряжении (порядка 70-100 Ампер!) Поэтому для формирования питающего напряжения для процессоров используются многофазные импульсные преобразователи. Принцип тот же самый, просто большой ток делится между несколькими фазами по 20-30 Ампер.
Подписывайтесь на канал, во второй части подробнее рассмотрим функциональную схему питания ноутбука.
Что еще почитать:
Чем питается ноутбук: схемотехника, принцип работы и неисправности. Часть 2: схема зарядки и подключения адаптера питания
Чем питается ноутбук: схемотехника, принцип работы и неисправности. Часть 3: «дежурка» +3VLP
Чем питается ноутбук: схемотехника, принцип работы и неисправности. Часть 4: «карта питания»
Чем питается ноутбук: схемотехника, принцип работы и неисправности. Часть 5: базовые напряжения +3V и +5V.
Чем питается ноутбук: программное управление электропитанием.
Чем питается ноутбук: схемотехника, принцип работы и неисправности. Часть 6: POWER SEQUENCE
Прошивка BIOS ноутбука, часть 1: основы и почему память «прошивают»
Прошивка BIOS ноутбука, часть 2: необходимое оборудование
«Я так тыщу раз делал..» или почему нельзя подключать матрицу ноутбука на «горячую»
Радиосхемы. — ШИМ-контроллер ViPer-100А
категория
Справочники радиолюбителя
материалы в категории
С. КОСЕНКО, г. Воронеж
КОСЕНКО, г. Воронеж
Радио, 2002 год, № 11
Речь пойдет о микросхеме ViPer-100А и зарядном устройстве для автомобильных аккумуляторных батарей на ее основе.
Новая линейка микросхем характеризуется всеми достоинствами своего предшественника — ШИМ-контроллеров серии UC384X — и, кроме того, обладает несколькими существенными преимуществами.
Прежде всего, это сокращаемое приблизительно вдвое число дискретных элементов «обвязки» микросхемы.
Немаловажное обстоятельство — высокая надежность тепловой защиты VIPer-коммутируем ого ИИП. В случае плохого теплового контакта коммутирующего транзистора с теплоотводом отдельно расположенный ШИМ-контроллер будет реагировать только на перегрев корпуса микросхемы. Тяжелый режим работы транзистора может привести к его тепловому пробою, и во время лавинообразного нарастания тока стока транзистор становится фактически неуправляемым. Выпрямленное сетевое напряжение через неисправный транзистор еще до срабатывания предохранителя может успеть вывести из строя ШИМ-контроллер. Для VIPer-коммутируемого ИИП такая ситуация исключена.
Для VIPer-коммутируемого ИИП такая ситуация исключена.
И самое главное достоинство — возможность автоматизированного проектирования ИИП.
Микросхема VIPer 100А выполнена в пятивыводном металлопластмассовом корпусе ТО-220-5 с зигзагообразным расположением выводов. Рассмотрим алгоритм работы и упрощенную функциональную схему изделия, показанную на рис. 1 [1].
Сравнивая рис. 1 и функциональную схему ШИМ-контроллера UC384X [2], легко заметить их подобие. Назначение многих узлов либо совпадает абсолютно, либо отличается незначительно. В частности, компаратор входного напряжения питания микросхемы А1 обеспечивает пороговый уровень при переходе VIPer-коммутатора в состояние «включено» приблизительно 11 В, «выключено» — 8 В. Аналогично работает тепловая защита. При повышении температуры кристалла до 140…170°С триггер безопасного режима D1 блокирует работу ШИМ D2 по входу R1. Работа будет возобновлена автоматически, как только температура кристалла понизится на 40°С по сравнению с уровнем срабатывания тепловой защиты.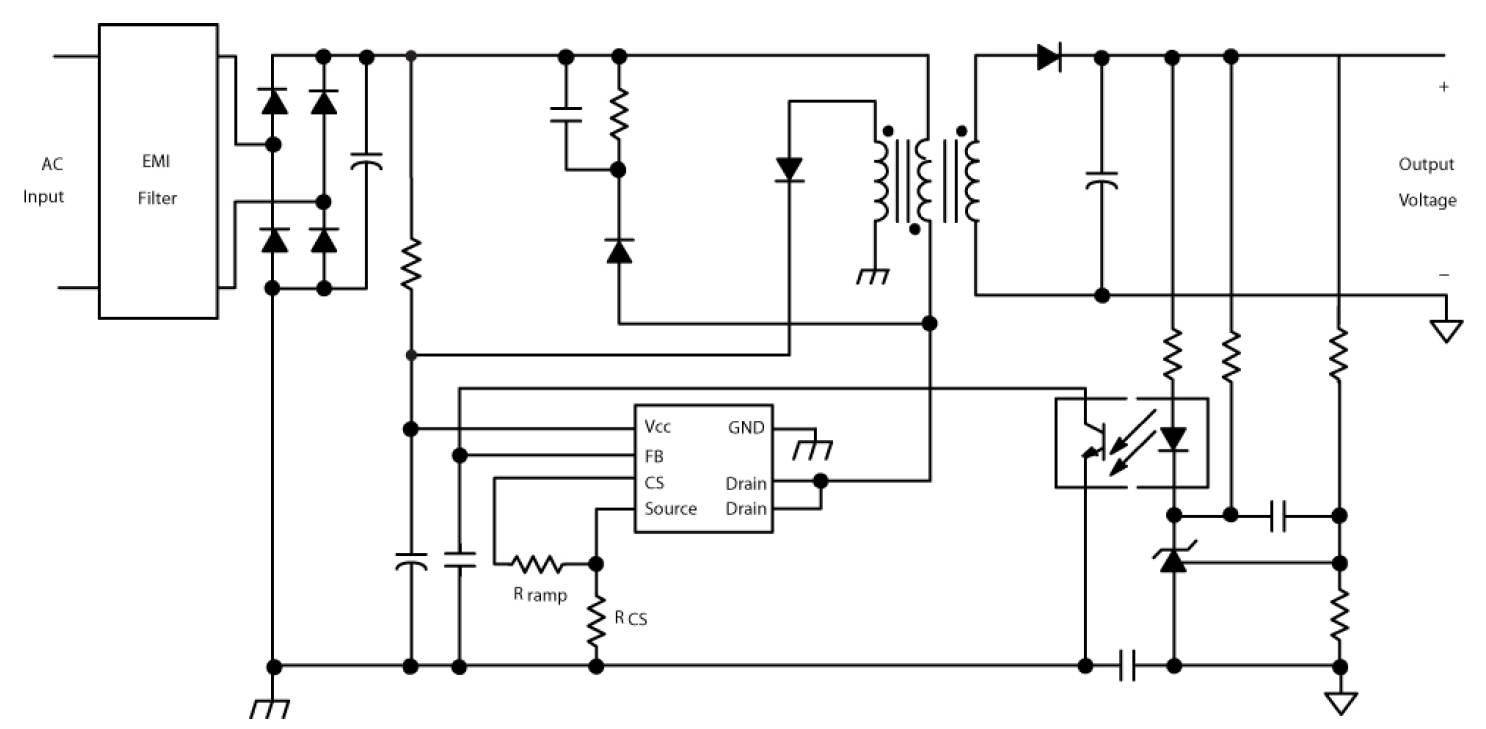
Потребляемый микросхемой ток не превышает 1 мА в состоянии «Выключено» и 15 мА — «Включено». Одна из особенностей изделия VIPer — на время пуска выводы 3 (DRAIN) и 2 (Vdd) внутри микросхемы соединены токо-ограничивающей цепью. Уровень ограничения составляет 3 мА. Этот ток распределяется между компаратором входного напряжения А1 (1 мА) и оксидным конденсатором фильтра, подключенным к выводу 2 (зарядный ток конденсатора — около 2 мА). После сравнительно медленного возрастания напряжение на оксидном конденсаторе достигает порогового уровня включения микросхемы (11 В), затем конденсатор разряжается рабочим током микросхемы 15 мА. Если микросхеме по каким-либо причинам (большая емкость разряженного перед включением конденсатора фильтра или замыкание в нагрузке) не удается перейти из пускового в рабочий режим, напряжение на конденсаторе быстро снижается до порогового уровня выключения, после чего процесс циклически повторяется. При попытках перехода в рабочий режим микросхема формирует «пачки» запускающих импульсов. Коэффициент заполнения «пачек» определяется отношением зарядного тока конденсатора к разрядному и составляет всего 2/15 « 13 %, что предотвращает повреждение входного и выходного выпрямителей в пусковом режиме или при замыканиях в нагрузке. Формирование нескольких «пачек» в пусковом режиме способствует плавному увеличению выходного напряжения ИИП и характеризует его «мягкое» включение.
Коэффициент заполнения «пачек» определяется отношением зарядного тока конденсатора к разрядному и составляет всего 2/15 « 13 %, что предотвращает повреждение входного и выходного выпрямителей в пусковом режиме или при замыканиях в нагрузке. Формирование нескольких «пачек» в пусковом режиме способствует плавному увеличению выходного напряжения ИИП и характеризует его «мягкое» включение.
Процесс регулирования выходного напряжения ИИП аналогичен рассмотренному для прототипа. Внутренние цепи обеспечивают стабилизацию напряжения питания микросхемы на уровне 13 В с помощью двух контуров регулирования: внутреннего и внешнего. Внутренний контур — обычный стабилизатор для питания всех узлов микросхемы. Внешний контур регулирования образуют вспомогательная обмотка трансформатора, подключенная к выводу 2 через внешний резистор, и соединенный с этим выводом усилитель сигнала ошибки A3. Двойная стабилизация напряжения питания микросхемы обеспечивает минимальное отклонение частоты коммутирующих импульсов. В [1] указано, что при изменении напряжения питания в интервале 9…15 В, а также несоответствии номиналов частотозадающих резистора и конденсатора расчетным значениям в пределах ±1% и ±5% соответственно отклонение частоты следования импульсов не превысит ±10%. Температурная нестабильность частоты не превысит -4 %, если температура кристалла увеличится от 25 до 125°С.
В [1] указано, что при изменении напряжения питания в интервале 9…15 В, а также несоответствии номиналов частотозадающих резистора и конденсатора расчетным значениям в пределах ±1% и ±5% соответственно отклонение частоты следования импульсов не превысит ±10%. Температурная нестабильность частоты не превысит -4 %, если температура кристалла увеличится от 25 до 125°С.
Так же, как и в ШИМ -контроллере UC384X, одноименный и функционально равноценный вывод 5 (СОМР) микросхемы VIPer с напряжением на нем в рабочем режиме около 4,5 В можно использовать для принудительного выключения ИИП.
Внутри микросхемы этот вывод может соединяться с общим проводом полевым транзистором V2 под воздействием триггера безопасного режима D1, реагирующего на блокирующие сигналы узла тепловой защиты А2, и компаратора входного напряжения А1. Если принудительное соединение вывода 5 с общим проводом произошло во время действия коммутирующего импульса, очередной импульс возможен не ранее чем через 1,7..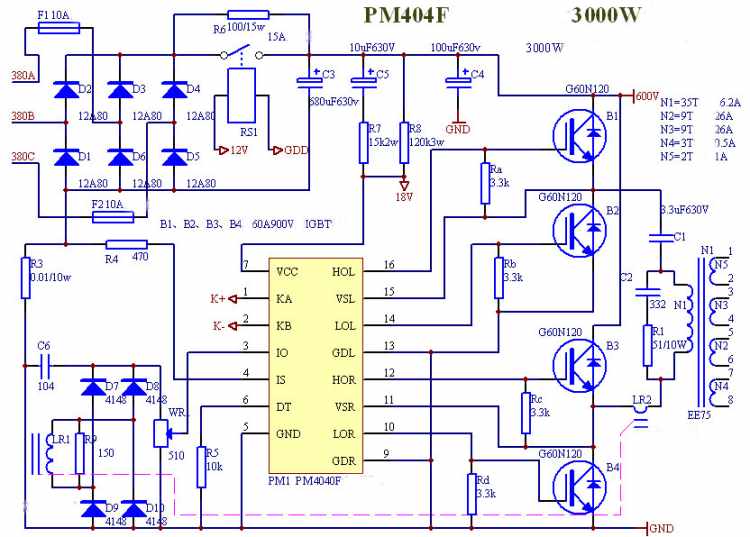 .5 мкс, хотя генератор все это время продолжает работать. Подключенный к выводу 5 конденсатор еще на некоторое время задержит возрастание напряжения до порогового уровня 0,5 В, и как минимум один коммутирующий импульс будет пропущен. Изменением числа пропускаемых импульсов также можно регулировать выходное напряжение ИИП. Временную задержку импульсов коммутации осуществляет элемент А5, подключенный к выходу компаратора контроля тока А4.
.5 мкс, хотя генератор все это время продолжает работать. Подключенный к выводу 5 конденсатор еще на некоторое время задержит возрастание напряжения до порогового уровня 0,5 В, и как минимум один коммутирующий импульс будет пропущен. Изменением числа пропускаемых импульсов также можно регулировать выходное напряжение ИИП. Временную задержку импульсов коммутации осуществляет элемент А5, подключенный к выходу компаратора контроля тока А4.
Особый интерес в изделии VIРег представляет использованный метод контроля тока, для чего на кристалле сформированы все необходимые элементы. Сигнал, пропорциональный току, подают с дополнительного вывода коммутирующего транзистора V3 на преобразователь ток—напряжение U1, а затем усиливают в усилителе датчика тока А9. Уровень напряжения на входе R3 ШИМ D2 пропорционален току стока, и при достижении заданного порогового уровня длительность коммутирующего импульса будет ограничена. Специальный узел гашения в течение 0,25 мкс после начала коммутирующего импульса подавляет выбросы на фронте, обусловленные током обратного восстановления выпрямительного диода во вторичной обмотке и распределенной емкостью накопительной обмотки.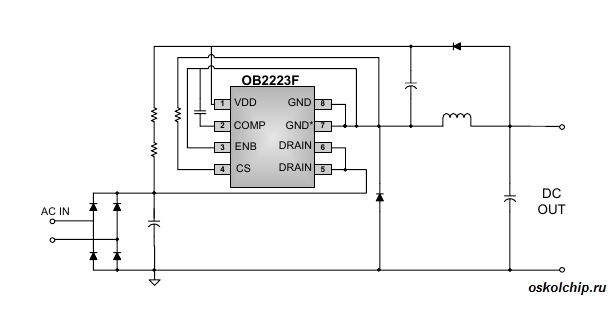 Эти выбросы могут вызвать преждевременное ограничение длительности импульса. При нормальном функционировании ИИП длительность коммутирующих импульсов ограничивается по входу R2 ШИМ.
Эти выбросы могут вызвать преждевременное ограничение длительности импульса. При нормальном функционировании ИИП длительность коммутирующих импульсов ограничивается по входу R2 ШИМ.
В случае замыкания в нагрузке после включения ИИП выходной ток будет вначале медленно увеличиваться в соответствии с динамическими характеристиками контура регулирования, а при достижении предельного для VIPer-100A значения 3 А ограничение тока будет происходить в каждом коммутирующем импульсе. Следует обратить внимание на тот факт, что приводимый в справочниках предельный ток З А — минимальный из интервала возможных для отдельных образцов. Типовое значение тока для большинства составляет 4 А, а отдельные микросхемы работоспособны и при уровне ограничения 5,4 А. Ограничить ток через коммутирующий транзистор можно и на более низком уровне, если использовать внешний преобразователь ток-напряжение, выход которого подключают к выводу 5 (СОМР). Все это гарантирует предотвращение повреждения ИИП в экстремальных ситуациях.![]()
Появление микросхемы VIPer-100A позволяет совершенно по-новому подойти к проблеме создания простого и надежного зарядного устройства (ЗУ) для автомобильных аккумуляторных батарей (АБ).
Большинство ЗУ заряжают АБ стабильным током. Однако во всех транспортных средствах, в том числе и легковых автомобилях, зарядка происходит при постоянном напряжении. В бортовой сети реле-регуляторы поддерживают напряжение на уровне 14±0,5 В. Поэтому разрядка АБ в режиме пуска током в несколько десятков ампер сопровождается последующим коротким промежутком времени, когда зарядный ток может достигать 30 и более ампер, а затем он быстро снижается до единиц и долей ампера.
Аналогичный зарядный режим может быть использован автолюбителями для решения задачи другого рода. Если необходимо срочно выехать, а автомобиль долгое время не эксплуатировался, то, скорее всего, из-за саморазрядки АБ попытки запустить двигатель, особенно в зимнее время, окажутся безуспешными. Некоторые автолюбители в подобных случаях применяют длительную (в течение полусуток и более) подзарядку АБ малым током, ускоряя тем самым коррозию решеток положительных электродов [3] и приближая выход батареи из строя. Более рационально в этом случае использовать в течение 15…30 мин ЗУ, заряжающее АБ при постоянном напряжении. Включенный последовательно с АБ резистор с небольшим (доли Ома) сопротивлением ограничит зарядный ток в начальный момент, и по мере зарядки напряжение на батарее будет увеличиваться, а ток уменьшаться.
Более рационально в этом случае использовать в течение 15…30 мин ЗУ, заряжающее АБ при постоянном напряжении. Включенный последовательно с АБ резистор с небольшим (доли Ома) сопротивлением ограничит зарядный ток в начальный момент, и по мере зарядки напряжение на батарее будет увеличиваться, а ток уменьшаться.
VIPer-коммутируемое ЗУ без хлопот можно доставить в гараж даже в кармане благодаря его малым габаритам и массе. С другой стороны, его можно использовать не только как полноценное зарядное устройство, но и как источник питания для других целей.
Поскольку такой ИИП схемотехнически защищен от замыканий, к нему можно подключать, как частично, так и полностью разряженную батарею. В зависимости от степени разряженности ИИП будет «перекачивать» в АБ энергию, ограниченную мощностью около 100 Вт, т. е. зарядный ток будет регулироваться автоматически, не выходя за пределы режима безопасной работы ИИП.
ЗУ позволяет заряжать АБ током не менее 6 А в начале и доводить напряжение на ней до 15 В в конце зарядки.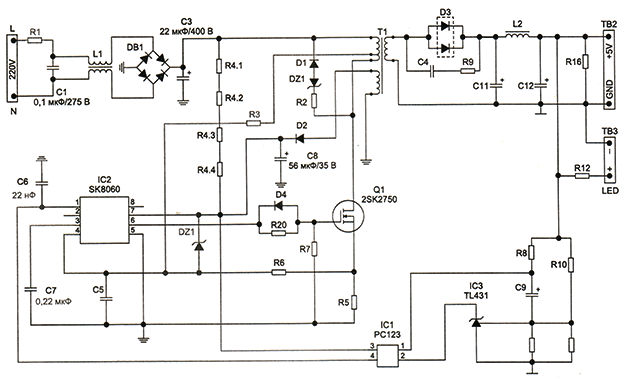 Рабочая частота преобразования используемого ИИП — 100 кГц. КПД устройства — не менее 87 %. Габариты ИИП без корпуса — 55x80x42,5 мм.
Рабочая частота преобразования используемого ИИП — 100 кГц. КПД устройства — не менее 87 %. Габариты ИИП без корпуса — 55x80x42,5 мм.
Сервисные функции ЗУ определяются свойствами используемой микросхемы VIPer-100А. Они уже упоминались: защита от замыканий и обрывов в нагрузке, реализация безопасных рабочих режимов, тепловая защита, автоматическое регулирование зарядного тока в зависимости от степени разряженности АБ.
Единственный недостаток ЗУ, к которому нужно отнестись очень серьезно, — уязвимость от переполюсовки. При неправильном подключении АБ возможно повреждение трансформатора и других элементов ЗУ, поэтому подключать его нужно очень внимательно.
Схема ЗУ, разработанная с помощью DESIGNE SOFTWARE («Эволюция обратноходовых импульсных ИП» в «Радио», 2002, ╧ 8), показана на рис. 2. Методика проектирования была подробно описана ранее. Параметры сетевого напряжения не менялись, частота преобразования выбрана равной 100 кГц, выходные параметры соответствуют напряжению 15 В при токе 6 А.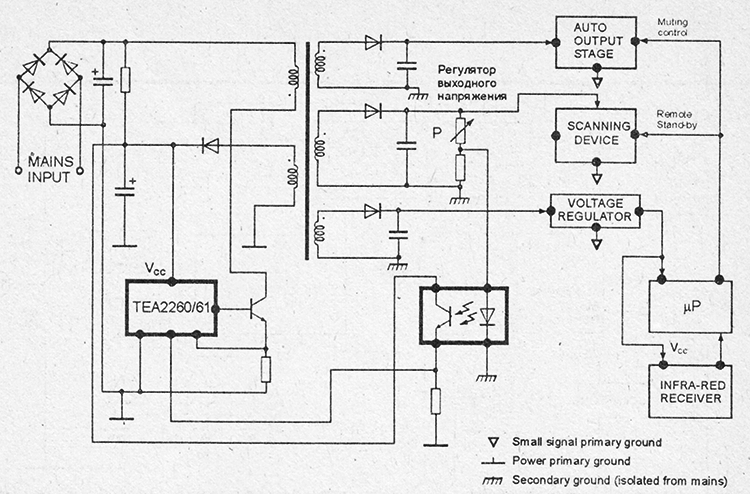 Магнитопровод трансформатора выбран RM10 (отечественный аналог KB 10) из материала N67 (аналог — М2500НМС1).
Магнитопровод трансформатора выбран RM10 (отечественный аналог KB 10) из материала N67 (аналог — М2500НМС1).
Благодаря подробному анализу алгоритма функционирования используемого в ЗУ изделия VIPer-100А, повторно описывать назначение отдельных элементов устройства не имеет смысла. Чертеж печатной платы показан на рис. 3.
Несмотря на минимальное число используемых элементов, монтаж получился весьма плотным, что объясняется желанием автора использовать в качестве готового корпуса устройства неисправный высоковольтный конденсатор К41-1а емкостью 0,1 мкФ на напряжение 10 кВ.
Микросхема VIPer 100А установлена на штыревой теплоотвод с эффективной площадью около 60 см2 через слюдяную пластину с применением теплопроводящей пасты, соединенный с общим проводом.
Диодный мост — импортный, рассчитан на прямой ток 1,5 А и обратное напряжение 1000 В. Диодная сборка VD4—VD7 представляет собой соединенные двумя винтами три дюралюминиевые пластины (толщина крайних — 1,5 мм, средней — 2 мм) размерами 30×40 мм, между которыми попарно с каждой стороны от центральной пластины зажаты без и изолятора с применением теплопроводящей пасты четыре диода КД213Б катодом к центру. При монтаже следует обратить внимание на изоляцию всех анодных выводов.
При монтаже следует обратить внимание на изоляцию всех анодных выводов.
Токоограничительный резистор R6 — С5-16МВ мощностью 5 Вт установлен перпендикулярно плате. Микроамперметр РА1 — М4283 или любой другой, используемый в переносных магнитофонах для индикации уровня записи. При налаживании его подключают к источнику стабилизированного напряжения 0,6 В и подбором резистора R5 устанавливают стрелку на край зеленого сектора.
Оксидные конденсаторы — импортные, поскольку отечественные не «впишутся» в указанные габариты ИИП. Конденсатор С7 подпаивают параллельно к резистору R3, а затем последний одним выводом впаивают перпендикулярно к плате, а второй соединяют навесным способом со свободным выводом аналогично установленного диода VD2.
Особое внимание следует уделить изготовлению и монтажу импульсного трансформатора. Его магнитопровод должен быть с немагнитным зазором 0,7 мм.
Обмотки трансформатора наматывают на самодельном каркасе. Скальпелем или острым ножом расслаивают небольшую стеклотекстолитовую пластину и отделяют от нее один слой толщиной 0,1. ..0,15 мм. Вырезав полоску требуемых размеров, с применением нитроклея без перекосов, наматывают ее в 2—3 слоя на стержень подходящего диаметра, а после высыхания клея снимают.
..0,15 мм. Вырезав полоску требуемых размеров, с применением нитроклея без перекосов, наматывают ее в 2—3 слоя на стержень подходящего диаметра, а после высыхания клея снимают.
На полученный таким образом каркас наматывают первый слой — 11 витков провода ПЭВ-2 0,41 в два проводника, затем межслойную изоляцию из лавсановой пленки или лакоткани и второй слой — 9 витков. Затем наматывают межобмоточную изоляцию.
Обмотку III, состоящую из 7 витков провода ПЭВ-2 1,5, наматывают на стержне чуть большего диаметра с расчетом, чтобы она поместилась на обмотке I. С каждой стороны катушки оставляют выводы длиной 8…10 мм. Полученную обмотку III осторожно надевают на первую секцию обмотки I так, чтобы их выводы были диаметрально противоположны, центрируют и с помощью клея фиксируют слой межобмоточной изоляции. После этого полезно проверить размещение катушки в магнитопроводе, и если обе пластины свободно соединяются, катушку вынимают и заливают ее торцы клеем для фиксации и герметизации обмоток.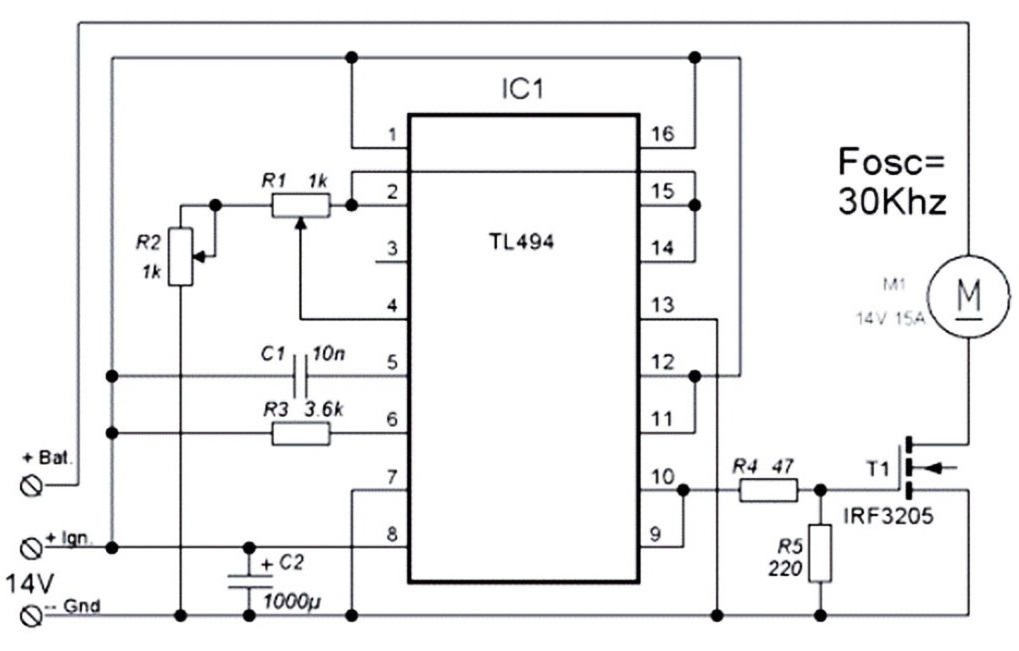
После высыхания клея на катушке наматывают в два слоя по 8 и 7 витков каждый вторую секцию обмотки I. Завершают намотку обмоткой II из 6 витков «вразрядку» провода ПЭВ-2 0,15 и после пробного размещения катушки в магнитопроводе снова герметизируют клеем торцы катушки.
Измеренная индуктивность обмотки I трансформатора совпала с рассчитанной в DESIGNE SOFTWARE и составила 225 мкГн. Готовый трансформатор по боковой поверхности закрывают электростатическим экраном — одним слоем медной фольги и фиксируют на плате с помощью скобы. Между трансформатором и скобой прокладывают полоску резины толщиной 1 мм. Склеивать пластины магнитопровода при сборке необязательно. Все выводы трансформатора, кроме 7, 2 и 3, запаивают в соответствующие отверстия на плате. Выводы 2 и 3 соединяют навесным способом, изолируют, а затем «прячут» под электростатический экран. Вывод 7 соединяют с платой коротким отрезком коаксиального кабеля с многожильным центральным проводником.
На крышке устройства размещают выключатель питания, держатель предохранителя на 2 А, микроамперметр и две клеммы для подключения АБ. Кроме того, для облегчения теплового режима ИИП на крышке корпуса фиксируют малогабаритный вентилятор, используемый для обдува микропроцессоров, желательно максимально возможной производительности, и предусматривают для него воздухо-заборные отверстия. Выводы вентилятора, рассчитанного на напряжение 12 В, подключают к конденсатору С9 через токоограничивающий резистор МЛТ-0,125 сопротивлением 8,2 Ом. В зависимости от модели и производительности потребляемый вентилятором ток будет составлять от 40…50 мА при 12 В до 55…65 мА при 15 В.
Кроме того, для облегчения теплового режима ИИП на крышке корпуса фиксируют малогабаритный вентилятор, используемый для обдува микропроцессоров, желательно максимально возможной производительности, и предусматривают для него воздухо-заборные отверстия. Выводы вентилятора, рассчитанного на напряжение 12 В, подключают к конденсатору С9 через токоограничивающий резистор МЛТ-0,125 сопротивлением 8,2 Ом. В зависимости от модели и производительности потребляемый вентилятором ток будет составлять от 40…50 мА при 12 В до 55…65 мА при 15 В.
Если ЗУ собрано из исправных деталей без ошибок и отклонение рабочей частоты от расчетного значения не более 10 %, налаживание устройства не требуется.
На рис. 4 показаны зависимости выходного напряжения (сплошная линия) и выходной мощности (штриховая линия) от тока нагрузки. Измерения проведены при замкнутом резисторе R6. Для уменьшения пульсаций на выходе был подключен оксидный конденсатор емкостью 22000 мкФ.
ЛИТЕРАТУРА
1.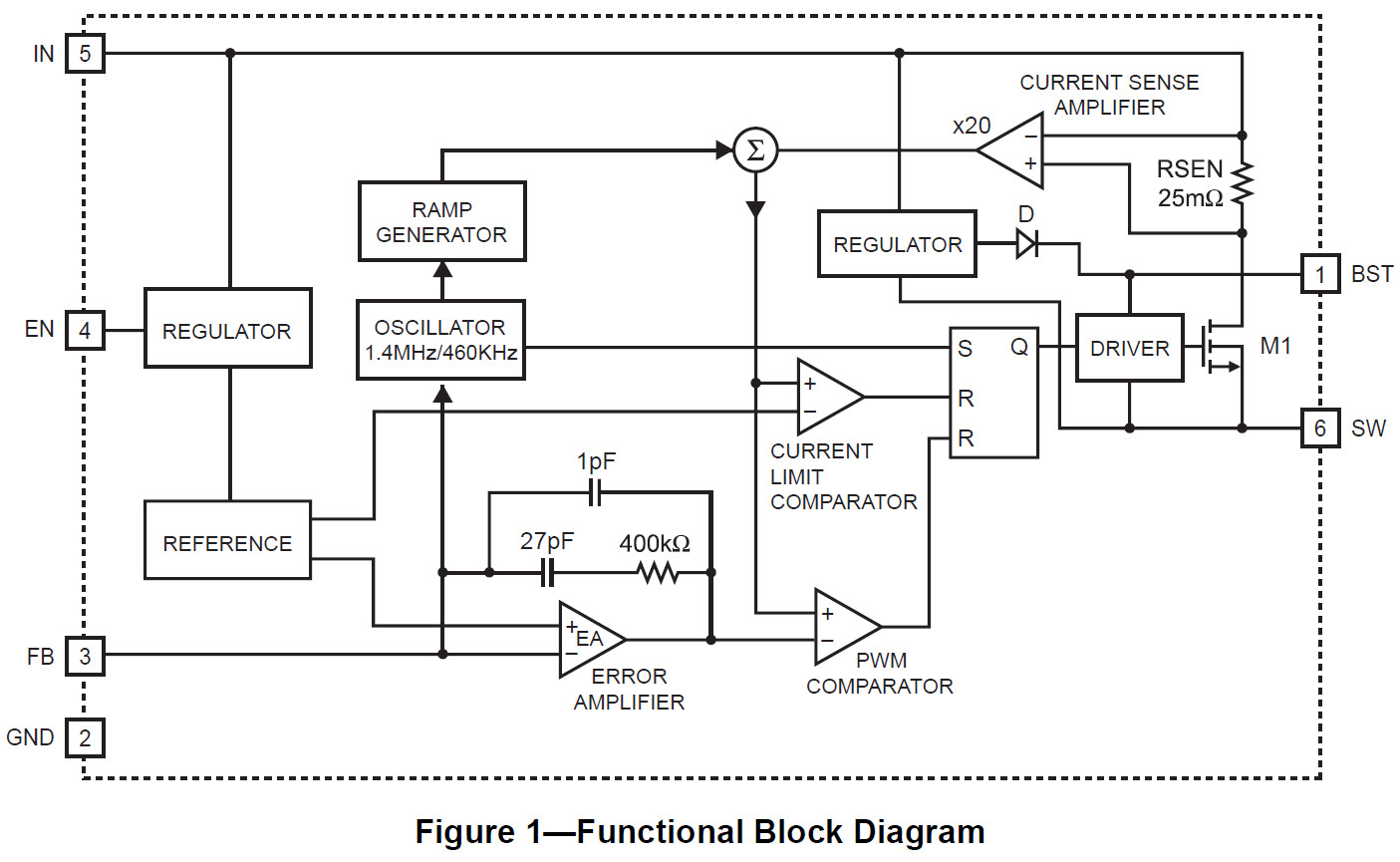 VIPer Swich Mode Flyback Power Supply DESIGNE SOFTWARE/Documentation/Data-sheet/Viper100 — Viper100A: p. 1—20, February 2001.
VIPer Swich Mode Flyback Power Supply DESIGNE SOFTWARE/Documentation/Data-sheet/Viper100 — Viper100A: p. 1—20, February 2001.
2. Микросхемы для импульсных источников питания и их применение. Справочник. — М.: ДОДЭКА, 1997.
3. Дасоян М. А., Курзуков Н. И., Тютрюмов О. С, Ягнятинскии В. М. Стартерные аккумуляторные батареи. Устройство, эксплуатация, ремонт. — М.: Транспорт, 1994.
Шим-контроллеры. Что такое шим контроллер, как он устроен и работает, виды и схемы
В схемотехнике современных импульсных источников питания (ИИП) приобрели широкую популярность ШИМ-регуляторы, выполненные в малогабаритных планарных корпусах с шестью выводами. Обозначение типа корпуса может быть SOT-23-6, SOT-23-6L, SOT-26, TSOP-6, SSOT-6. Внешний вид и расположение выводов показаны на рисунке ниже. В данном случае на левом фрагменте картинки представлена кодовая маркировка LD7530A
Назначение выводов:
1 — GND. (Общий провод).
2 — FB.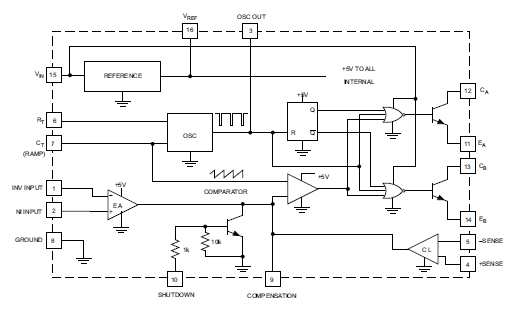 (FeedBack — Обратная Связь). Вход для управления длительностью импульсов сигналом с выходного напряжения. Иногда может иметь обозначение COMP (входной компаратор).
(FeedBack — Обратная Связь). Вход для управления длительностью импульсов сигналом с выходного напряжения. Иногда может иметь обозначение COMP (входной компаратор).
3 — RI/RT/CT/COMP/NC — В зависимости от типа микросхемы, может быть задействован для частотозадающей RC цепи (RI/RT/CT), либо для организации защиты, как вход компаратора отключения ШИМ при пороговом значение на его входе, указанном в документе. В некоторых типах микросхем этот вход может быть никак не задействован (NC — No Connect).
4 — SENSE, по другому CS (Current Sense) — Вход с датчика тока в истоке ключа.
5 — VCC — Вход напряжения питания и запуска микросхемы.
6 — OUT (GATE) — Выход для управления затвором (Gate) ключа.
Функционально подобные регуляторы работают по принципу популярных ранее микросхем ШИМ серии xx384x, которые хорошо зарекомендовали себя в плане надёжности и устойчивости.
Некоторые затруднения часто возникают при замене или выборе аналога для подобных ШИМ-регуляторов по причине применения кодовой маркировки в обозначении типа микросхем. Ситуация осложняется большим количеством производителей компонентов, которые не всегда предоставляют документацию в массовый доступ, так же не все производители готовых устройств снабжают схемами ремонтные сервисные центры, поэтому реальные схемные решения ремонтникам часто приходится изучать по установленным компонентам и монтажным соединениям непосредственно на плате.
Ситуация осложняется большим количеством производителей компонентов, которые не всегда предоставляют документацию в массовый доступ, так же не все производители готовых устройств снабжают схемами ремонтные сервисные центры, поэтому реальные схемные решения ремонтникам часто приходится изучать по установленным компонентам и монтажным соединениям непосредственно на плате.
В практике часто встречаются микросхемы ШИМ и кодом маркировки EAxxx и Eaxxx. Официальной документации на них не найдено в свободном доступе, но сохранились обсуждения на форумах и кусочки картинок из PDF от System General, которая публикует их как SG6848T и SG6848T2. Рисунок прилагается.
Вниманию мастеров предлагаем таблицы, составленные из доступной в интернете информации и документов PDF для подбора аналогов при замене наиболее распространённых шестиногих планарных ШИМ c цоколёвкой выводов: pin1 — GND, pin2 — FB (COMP), pin4 — Sense, pin5 — Vcc, pin6 — OUT.
Основным их различием является применение и назначение вывода 3.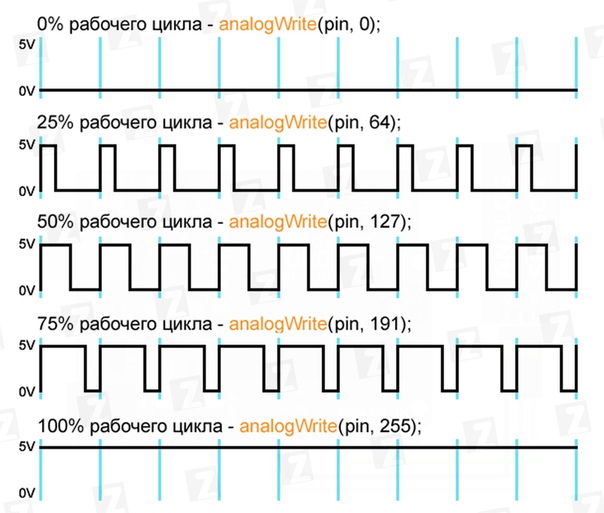
ШИМ-регуляторы (PWM), без использования вывода 3.
| Name | Part Namber | Diler | Marking |
|---|---|---|---|
| SG6849 | SG684965TZ | Fairchild / ON Semi | BBxx |
| SG6849 | SG6849-65T, SG6849-65TZ | System General | MBxx EBxx |
| SGP400 | SGP400TZ | System General | AAKxx |
ШИМ-регуляторы (PWM) с установкой резистора 95-100 kOhm на вывод 3.
Применяя перечисленные ниже ШИМ, частоту следует установить резистором RT (RI) от вывода 3 на землю. Обычно его номинал выбирается 95-100 kOhm для частоты 65-100 KHz. Более точно смотрите в прилагаемой документации. Файлы PDF упакованы в RAR.
| Name | Part Namber | Diler | Marking |
|---|---|---|---|
| AP3103A | AP3103AKTR-G1 | Diodes Incorporated | GHL |
| AP8263 | AP8263E6R, A8263E6VR | AiT Semiconductor | S1xx |
| AT3263 | AT3263S6 | ATC Technology | 3263 |
| CR6848 | CR6848S | Chip-Rail | 848h26 |
| CR6850 | CR6850S | Chip-Rail | 850xx |
| CR6851 | CR6851S | Chip-Rail | 851xx |
| FAN6602R | FAN6602RM6X | Fairchild / ON Semi | ACCxx |
| FS6830 | FS6830 | FirstSemi | |
| GR8830 | GR8830CG | Grenergy | 30xx |
| GR8836 | GR8836C, GR8836CG | Grenergy | 36xx |
| H6849 | H6849NF | HI-SINCERITY | |
| H6850 | H6850NF | HI-SINCERITY | |
| HT2263 | HT2263MP | HOT-CHIP | 63xxx |
| KP201 | Kiwi Instruments | ||
| LD5530 | LD5530GL LD5530R | Leadtrand | xxt30 xxt30R |
| LD7531 | LD7531GL, LD7531PL | Leadtrend | xxP31 |
| LD7531A | LD7531AGL | Leadtrend | xxP31A |
| LD7535/A | LD7535BL, LD7535GL, LD7535ABL, LD7535AGL | Leadtrend | xxP35-xxx35A |
| LD7550 | LD7550BL, LD7550IL | Leadtrend | xxP50 |
| LD7550B | LD7550BBL, LD7550BIL | Leadtrend | xxP50B |
| LD7551 | LD7551BL/IL | Leadtrend | xxP51 |
| LD7551C | LD7551CGL | Leadtrend | xxP51C |
| NX1049 | XN1049TP | Xian-Innuovo | 49xxx |
| OB2262 | OB2262MP | On-Bright-Electronics | 62xx |
| OB2263 | OB2263MP | On-Bright-Electronics | 63xx |
| PT4201 | PT4201E23F | Powtech | 4201 |
| R7731 | R7731GE/PE | Richtek | 0Q= |
| R7731A | R7731AGE | Richtek | IDP=xx |
| SD4870 | SD4870TR | Silan Microelectronics | 4870 |
| SF1530 | SF1530LGT | SiFirst | 30xxx |
| SG5701 | SG5701TZ | System General | AAExx |
| SG6848 | SG6848T, SG6848T1, SG6848TZ1, SG6848T2 | Fairchild / ON Semi | AAHxx EAxxx |
| SG6858 | SG6858TZ | Fairchild / ON Semi | AAIxx |
| SG6859A | SG6859ATZ, SG6859ATY | Fairchild / ON Semi | AAJFxx |
| SG6859 | SG6859TZ | Fairchild / ON Semi | AAJMxx |
| SG6860 | SG6860TY | Fairchild | AAQxx |
| SP6850 | SP6850S26RG | Sporton Lab | 850xx |
| SP6853 | SP6853S26RGB, SP6853S26RG | Sporton Lab | 853xx |
| SW2263 | SW2263MP | SamWin | |
| UC3863/G | UC3863G-AG6-R | Unisonic Technologies Co | U863 U863G |
ШИМ-регуляторы, в которых вывод 3 используется иначе.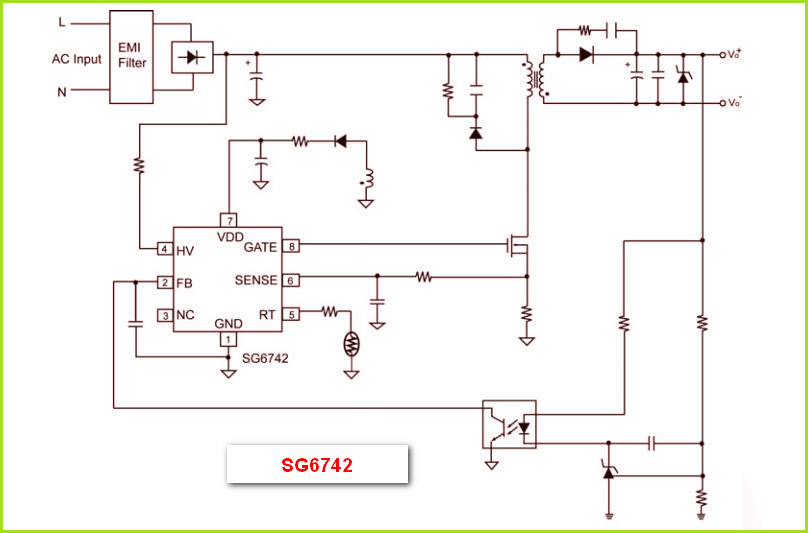
При использовании перечисленных ниже ШИМ (PWM-контроллеров) следует обратить внимание на вывод 3, который может использоваться для организации защиты — тепловой или от превышения входного напряжения.
Частота может быть фиксированной 65kHz, либо устанавливаться номиналом конденсатора на выводе 3.
При замене любых микросхем на аналоги внимательно изучайте документацию. Файлы PDF упакованы в архив RAR.
| Name | Part Namber | Diler | Marking |
|---|---|---|---|
| AP3105/V/L/R | AP3105KTR-G1, AP3105VKTR-G1, AP3105LKTR-G1, AP3105RKTR-G1 | Diodes Incorporated | GHN GHO GHP GHQ |
| AP3105NA/NV/NL/NR | AP3105NAKTR-G1, AP3105NVKTR-G1, AP3105NLKTR-G1, AP3105NRKTR-G1 | Diodes Incorporated | GKN GKO GKP GKQ |
| AP3125A/V/L/R | AP3125AKTR-G1, AP3125VKTR-G1, AP3125LKTR-G1, AP3125RKTR-G1 | Diodes Incorporated | GLS GLU GNB GNC |
| AP3125B | AP3125BKTR-G1 | Diodes Incorporated | GLV |
| AP3125HA/HB | AP3125HAKTR-G1, AP3125HBKTR-G1 | Diodes Incorporated | GNP GNQ |
Один из используемых подходов, позволяющих существенно сократить потери на нагревании силовых компонентов радиосхем, представляет собой использование переключательных режимов работы установок. При подобных системах электросиловой компонент или раскрыт — в это время на нем наблюдается фактически нулевое падение напряжения, или открыт — в это время на него подается нулевой ток. Рассеиваемую мощность можно вычислить, перемножив показатели силы тока и напряжения. В этом режиме получается достичь коэффициента полезного действия около 75-80% и более.
Что такое ШИМ?
Для получения на выходе сигнала требуемой формы силовой ключ должен открываться всего лишь на определенное время, пропорциональное вычисленным показателям выходного напряжения. В этом и заключается принцип широтно-импульсной модуляции (ШИМ, PWM). Далее сигнал такой формы, состоящий из импульсов, разнящихся по своей ширине, поступает в область фильтра на основе дросселя и конденсатора. После преобразования на выходе будет практически идеальный сигнал требуемой формы.
Область применения ШИМ не ограничивается импульсными стабилизаторами и преобразователями напряжения. Использование данного принципа при проектировании мощного усилителя звуковой частоты дает возможность существенно снизить потребление устройством электроэнергии, приводит к миниатюризации схемы и оптимизирует систему теплоотдачи.![]() К недостаткам можно причислить посредственное качество сигнала на выходе.
К недостаткам можно причислить посредственное качество сигнала на выходе.
Формирование ШИМ-сигналов
Создавать ШИМ-сигналы нужной формы достаточно трудно. Тем не менее индустрия сегодня может порадовать замечательными специальными микросхемами, известными как ШИМ-контроллеры. Они недорогие и целиком решают задачу формирования широтно-импульсного сигнала. Сориентироваться в устройстве подобных контроллеров и их использовании поможет ознакомление с их типичной конструкцией.
Стандартная схема контроллера ШИМ предполагает наличие следующих выходов:
- Общий вывод (GND). Он реализуется в виде ножки, которая подключается к общему проводу схемы питания устройства.
- Вывод питания (VC). Отвечает за электропитание схемы. Важно не спутать его с соседом с похожим названием — выводом VCC.
- Вывод контроля питания (VCC). Как правило, чип контроллера ШИМ принимает на себя руководство силовыми транзисторами (биполярными либо полевыми). В случае если напряжение на выходе снизится, транзисторы станут открываться лишь частично, а не целиком. Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.
 Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.
Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.Выходное управляющее напряжение (OUT)
Количество выводов микросхемы определяется её конструкцией и принципом работы. Не всегда удается сразу разобраться в сложных терминах, но попробуем выделить суть. Существуют микросхемы на 2-х выводах, управляющие двухтактными (двухплечевыми) каскадами (примеры: мост, полумост, 2-тактный обратный преобразователь). Существуют и аналоги ШИМ-контроллеров для управления однотактными (одноплечевыми) каскадами (примеры: прямой/обратный, повышающий/понижающий, инвертирующий).
Помимо этого, выходной каскад может быть по строению одно- и двухтактным.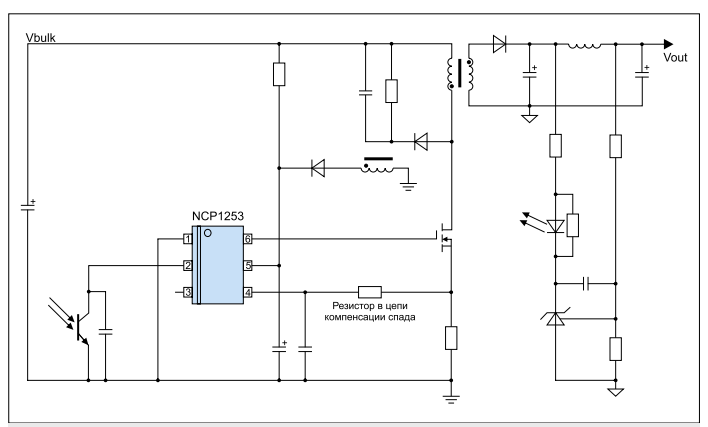 Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей «затвор — исток» и «затвор — сток». Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей «затвор — исток» и «затвор — сток». Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
ШИМ-контроллеры для источников питания большой мощности могут иметь также элементы управления выходным ключом (драйверы). В качестве выходных ключей рекомендуется использовать IGBT-транзисторы.
Основные проблемы ШИМ-преобразователей
При работе любого устройства полностью исключить вероятность поломки невозможно, и преобразователей это тоже касается. Сложность конструкции при этом не имеет значения, проблемы в эксплуатации может вызвать даже известный ШИМ-контроллер TL494. Неисправности имеют различную природу — некоторые из них можно выявить на глаз, а для обнаружения других требуется специальное измерительное оборудование.
Чтобы ШИМ-контроллер, следует ознакомится со списком основных неисправностей приборов, а лишь позже — с вариантами их устранения.
Диагностика неисправностей
Одна из часто встречающихся проблем — пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра.
Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
- Контроллер глохнет после старта — обрыв петли ОС, перепад по току, проблемы с конденсатором на выходе фильтра (если таковой имеется), драйвером; возможно, разладилось управление ШИМ-контроллером. Надо осмотреть устройство на предмет сколов и деформаций, замерить показатели нагрузки и сравнить их с типовыми.
- ШИМ-контроллер не стартует — отсутствует одно из входных напряжений или устройство неисправно. Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
- Напряжение на выходе отличается от номинального — проблемы с петлей ООС или с контроллером.
- После старта ШИМ на БП уходит в защиту при отсутствии КЗ на ключах — некорректная работа ШИМ или драйверов.
- Нестабильная работа платы, наличие странных звуков — обрыв петли ООС или цепочки RC, деградация емкости фильтра.
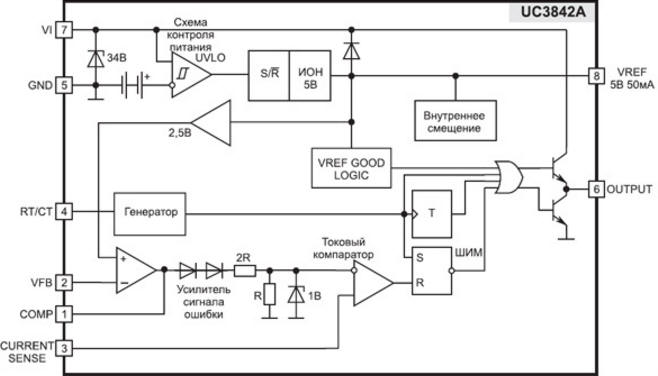 Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.В заключение
Универсальные и многофункциональные ШИМ-контроллеры сейчас можно встретить практически везде. Они служат не только в качестве неотъемлемой составляющей блоков питания большинства современных устройств — типовых компьютеров и других повседневных девайсов. На основе контроллеров разрабатываются новые технологии, позволяющие существенно сократить расход ресурсов во многих отраслях человеческой деятельности. Владельцам частных домов пригодятся контроллеры заряда аккумуляторов от фотоэлектрических батарей, основанные на принципе широтно-импульсной модуляции тока заряда.![]()
Высокий коэффициент полезного действия делает разработку новых устройств, действие которых основывается на принципе ШИМ, весьма перспективной. Вторичные источники питания — вовсе не единственное направление деятельности.
Что вообще такое — инвертор.
Данный узел предназначен для преобразования постоянного тока в переменный. В данном случае мы имеем на входе 310 Вольт постоянного тока, которые надо подать на трансформатор. Но так как трансформаторы не хотят работать на постоянном токе, то и нужен инвертор.
Инвертор состоит из двух основных узлов.
ШИМ контроллера.
А также выходных высоковольтных транзисторов. Попутно весьма кстати попал в кадр трансформатор управления этими транзисторами.
Впрочем инвертор может выглядеть заметно проще, например у известного блока питания.
Микросхема, жменька деталей, вот и весь ШИМ контроллер.
В данном случае схемотехника блока питания, а также его мощность заметно отличаются от предыдущего варианта, потому транзистор всего один.
Еще один вариант, слева конденсаторы входного фильтра, справа трансформатор, между ними инвертор.
Так как на силовом транзисторе выделяется значительная мощность, то чаще всего он устанавливается на радиатор.
Но давайте немного отвлечемся на историю, с чего собственно все начиналось. Возможно конечно начиналось не с этого, потому точнее будет сказать, с чего начинал я.
Как вы понимаете, раньше не было ШИМ контроллеров, а иногда и обычную «кренку» купить была проблема, но прогресс не стоял на месте и радиолюбители пытались заменить большие трансформаторы на импульсные блоки питания.
На схеме показан типичный автогенератор, но были схемы и с простой логикой в качестве генератора импульсов.
Тогда схемы подобных блоков питания часто встречались в журнале Радио в контексте усилителей мощности. Но мое знакомство было на примере блока питания для Синклера. Кстати на фото один из них, который я оставил себе на память:)
Правда вышеприведенная схема требовала подбора транзисторов и в моем случае сильно перегревалась.
Схема с автогенератором считается самой простой, в данном примере она даже не имеет стабилизации выходного напряжения.
При всем современном разнообразии микросхем показанная выше схема также нашла себя в современном мире, в качестве «электронного трансформатора» для галогенных ламп.
Правда постепенно такие лампы заменяют на светодиоды, но все равно электронные трансформаторы довольно популярны, в основном из-за свой простоты и дешевизны.
Уже через довольно большое время подобные схемы получили второе дыхание. Известная фирма International Rectifier выпустила весьма простую микросхему для электронного балласта люминесцентных ламп. Но выяснилось, что данная микросхема отлично работает в качестве задающей для импульсного БП. К ним относятся микросхемы IR2151, IR2153 и подобные.
Вообще некоторые радиолюбители делали и стабилизированные блоки питания на базе этой микросхемы, но работает это не всегда корректно.
По сути для этой микросхемы надо только несколько мелких деталей и пара полевиков, вот и вся схема инвертора.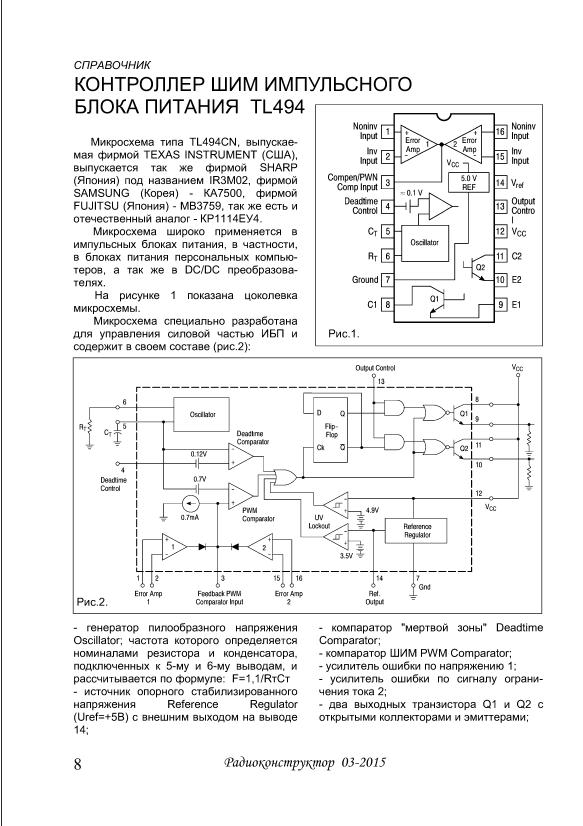 Именно с применением этой микросхемы я делал первичный блок питания для своего лабораторного.
Именно с применением этой микросхемы я делал первичный блок питания для своего лабораторного.
Кстати, именно эту микросхему я рекомендую для питания усилителей мощности, как неприхотливую и довольно надежную. А также хочу сказать, что нерегулируемые БП лучше себя ведут в плане шумов.
Так выглядит трехканальный блок питания с мощностью в 300 Ватт и ШИМ регулировкой вентилятора. Более полная информация есть в обзоре лабораторника.
Также довольно часто можно встретить и однотактные блоки питания на основе автогенератора. Особенно часто они попадались в АТХ боках в качестве дежурки.
Также они могут попасться и в очень бюджетных зарядных для телефонов. Автогенератор является самым простым типом инвертора.
Хотя бывают и исключения, например блок питания довольно дорогого фирменного кондиционера также имел в своем составе автогенератор, правда сделан довольно качественно и имеет стабилизацию напряжения.
В следующий раз мне попались импульсные блоки питания в новых тогда телевизорах. После больших и тяжелых трансформаторов это был прогресс.
После больших и тяжелых трансформаторов это был прогресс.
Схемотехника правда была жуткая, ремонтопригодность слабая, да и габарит я не назвал маленьким. На фото блок питания мощностью 80 Ватт.
Сначала они также делались по схеме с автогенератором, но потом начали ставить микросхему, правда особо ничего это не изменило.
Вот и подошли мы к теме более современных инверторов, так как на этом этапе блоки питания вышли на тот схемотехнический уровень, который мы сейчас наблюдаем в современных блоках.
Да, поднимали частоту, расширяли диапазон работы, мощность, но суть осталась той же что и была 30 лет назад. Правда так как тогда интегральные ШИМ контроллеры были слабо развиты, то делали их в виде сборок.
Впрочем и в современных блоках питания не стесняются применять такие вот унифицированные модули, по своему это даже удобно.
Типовая блок схема распространенных моделей инверторов состоит из пяти узлов.
1. Узел контроля напряжения питания, защита от работы при пониженном и повышенном напряжении.
2. Вспомогательное питания или цепь запуска.
3. Силовой элемент и датчик тока. Этот узел может заметно отличаться в зависимости от топологии блока питания.
4. Собственно ШИМ контроллер, мозги блока питания.
5. Узел основного питания ШИМ контроллера.
Рассмотрим как происходит запуск большинства блоков питания, эта информация может помочь в поиске неисправностей.
После того как подали высокое напряжение, оно через резистор попадает в цепь питания ШИМ контроллера.
Как только напряжение достигнет порога включения ШИМ контроллер запускается, питаясь в это время от конденсатора в цепи питания.
Если ваш блок питания не подает признаков жизни, проверьте, есть ли питание на входе ШИМ контроллера, иногда эти резисторы уходят в обрыв.
Затем ШИМ контроллер проверяет, в порядке ли питающее напряжение. Эта цепь есть далеко не у всех инверторов, потому если ее нет, то можно сразу перейти к следующему шагу.
Если с питанием все отлично, то контроллер начинает выдавать управляющие импульсы силовому транзистору.![]() попутно при этом контролируется ток в цепи этого транзистора и если он превышен, то ШИМ контроллер переходит в режим защиты.
попутно при этом контролируется ток в цепи этого транзистора и если он превышен, то ШИМ контроллер переходит в режим защиты.
Если все нормально, то буквально после нескольких тактов на выходе цепи основного питания появляется рабочее напряжение, которое и питает контроллер. Кстати это один из узлов отказа, если питания нет, то блок питания будет работать в старт-стоп режиме.
Если все этапы запуска прошли корректно, то дальше вступает в дело ШИМ стабилизация. В данном случае я всегда сравниваю ее с бочкой, в которую мы порциями подаем воду и сливая ее через другой кран с разным напором. Задача контроллера поддерживать всегда один и тот же уровень воды в бочке при том, что вводной кран может быть только в двух состояниях, открыто и закрыто.
Кстати, многие видели на выходе блоков питания резистор, подключенный параллельно питанию, он нужен чтобы обеспечить некую минимальную нагрузку, так как блоку питания тяжело работать при очень малой ширине импульса.
Для примера ширина импульсов при небольшой нагрузке.
Если увеличить нагрузку, то ШИМ контроллер увеличит подачу энергии в трансформатор, а через него в нагрузку.
Даже если к примеру нагрузить блок питания на полную, то ширина импульсов не будет полной.
Запас необходим для компенсации снижения входного напряжения.
Если снизить входное напряжение еще больше, то ШИМ контроллер просто выставит максимальную ширину импульса. Кстати, ШИМ контроллеры блоков питания не формируют 100% заполнение, так как всегда необходимо «мертвое» время для защиты выходных транзисторов. В это время выходные транзисторы закрыты.
Для обратноходовых однотактных блоков питания, а именно они используются в качестве блоков питания небольшой мощности, максимальное заполнение составляет 50%.
Самым первым ШИМ контроллером, с которым я познакомился, была легендарная TL494. Микросхема очень старая, но так получилось, что у разработчика дешевый и очень универсальный контроллер и даже спустя много лет и при наличии современных решений он еще весьма широко применяется в блоках питания.
Выпускается она многими фирмами и иногда под разными названиями, например аналог от Самсунга называется КА7500.
На первый взгляд его внутреннее устройство может показаться довольно сложным, но на самом деле таковым не является.
Если немного упростить картинку, то будет примерно так:
1 и 2, стабилизатор питания и источник опорного напряжения.
3. Генератор импульсов, задает частоту работы контроллера.
4. Два компаратора, один обычно используется для стабилизации тока, второй — напряжения.
5. Задатчик мертвого времени, т.е. минимальной паузы между открытым состоянием выходов.
6. Узел сложения всех сигналов.
7. Триггер, который управляет выходными ключами и задает логику работы, двухтактный или однотактный режим. В некоторых аналогах этот триггер сбоил на частотах ниже 100 Гц, чем доставлял немало сюрпризов строителям повышающих инверторов в 220 Вольт.
Микросхема выполнена в корпусе с 16 выводами. Сама по себе надежна, но иногда в блоках питания АТХ, где ее питание идет от источника дежурного напряжения, выходит из строя после его ухода в разнос, когда высыхал конденсатор по выходу 5 Вольт.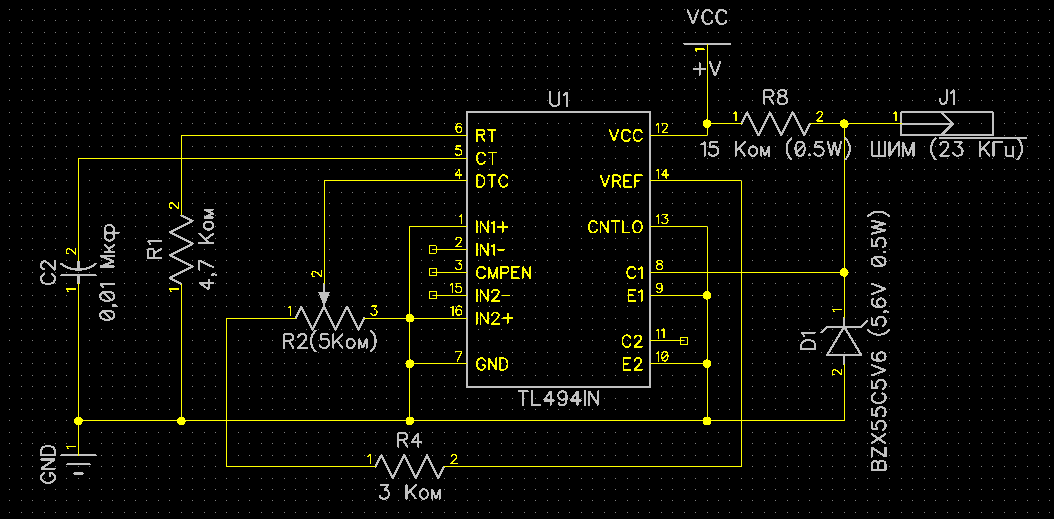 Пробивало стабилизатор опорного напряжения и на выходе БП запросто могло появиться высокое напряжение. Потому при проверке прежде всего смотреть наличие 5 Вольт на выводе 14.
Пробивало стабилизатор опорного напряжения и на выходе БП запросто могло появиться высокое напряжение. Потому при проверке прежде всего смотреть наличие 5 Вольт на выводе 14.
В блоках питания АТ, а потом в распространенных китайских БП в кожухе она питается от своего же силового трансформатора. Запуск происходит за счет резисторов в базовых цепях силовых ключей. При включении они сначала входят в автогенераторный режим, на выходе трансформатора появляется небольшое напряжение, микросхема начинает работать и перехватывает управление на себя. Потому если БП не запускается, то в первую очередь проверяем резисторы выделенные на схеме резисторы.
Вторым, не менее легендарным ШИМ контроллером является семейство однотактных UC384х.
Думаю что вы могли из встречать раньше в блоках питания и преобразователях напряжения.
Внутреннее устройство весьма похоже на TL494, но немного отличается. Для начала у микросхемы только один выход, а не два.
Кроме того компараторы привязаны к определенному напряжению, заданному внутри микросхемы, а не универсальные.
Ну и конечно ключевая особенность, микротоковый старт. пока микросхема не начнет работать, он потребляет очень маленький ток, потому запустить ее можно прямо от входного напряжения через резистор, TL494 так не умеет.
Чтобы запуск проходил корректно, у микросхемы есть пороговая схема определяющая напряжение включения и выключения микросхемы. Существует два варианта, около 9 и 15 Вольт.
Кроме того микросхема может иметь 50 и 100% рабочий цикл, первая идет в блоки питания, вторая в преобразователи напряжения.
Так получается четыре варианта исполнения этого контроллера.
Микросхема выпускается в разных корпусах, но наиболее распространен корпус с восемью выводами.
Типовая схема блока питания с этой микросхемой выглядит примерно так.
Сейчас на рынке есть много блоков питания с другими микросхемами, но если посмотреть на их схему, то вы увидите очень много общего, все те же узлы и элементы. Отличия если и есть, то они минимальны.
Инверторы блоков питания могут иметь разную топологию, и об этом я обязательно расскажу отдельно, но большинство выполнено по схемотехнике флайбек или полумост, две верхние схемы на чертеже. Собственно все описанные сегодня блоки питания работают именно так.
Собственно все описанные сегодня блоки питания работают именно так.
Но вернемся к ШИМ контроллерам. Перед этим я описывал варианты, когда ШИМ контроллер отдельно, а силовой узел отдельно. но также получили распространение и полностью интегрированные контроллеры, например серии TOP от Power integrations где практически все собрано в одном корпусе.
Не так давно мне даже попалась подделка, причем что интересно, она слева, с лазерной маркировкой, справа оригинал.
Распространение они получили благодаря простейшей схемотехнике, где в простом варианте блок питания состоит буквально из нескольких деталей.
Потом появились более продвинутые контроллеры, где можно задавать напряжение включения и отключения, а также ограничение выходной мощности. Но при желании их можно перевести в трехвыводный режим, соединив выводы как было на фото раньше.
Но в любом случае данные контроллеры гораздо умнее и имеют комплекс защит от разных проблем, например они выдерживали напряжение более 300 Вольт по входу просто блокируя свою работу.
Но секрет их популярности был также и в удобной программе расчета, которую предоставлял производитель. Она позволяла рассчитать все, вплоть до укладки обмоток трансформатора. А при обнаружении проблем в расчетах, выдавала подсказки.
Производитель предоставлял варианты применения своих микросхем в виде примеров. Был даже вариант компьютерного блока питания, но как-то не пошло.
Зато в небольших блоках питания, например мониторов, он встречаются весьма часто.
Кроме того я и сам их очень активно использую уже наверное лет 15.
Китайские производители также не отстают, выпуская свои варианты подобных микросхем.
Которые довольно успешно применяют в небольших блоках питания
Кстати, при желании можно использовать ШИМ контроллеры и без обратной связи от выходного напряжения, используя обмотку питания самого контроллера. Схема упрощается, но стабильность конечно будет немного ниже чем при правильной обратной связи.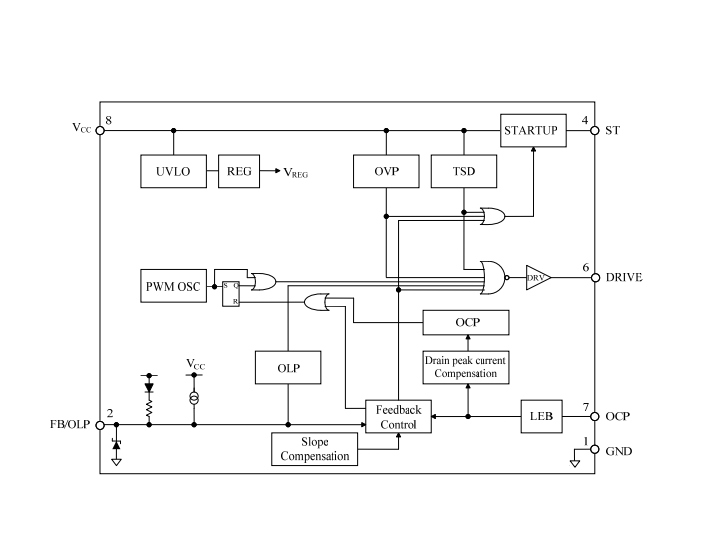
В общих чертах на этом все. Вообще мне иногда кажется, что чем больше я рассказываю, тем больше остается за кадром, что еще хотелось бы рассказать более подробно, но не успеваешь. Потому скорее всего будут еще выпуски по отдельным узлам и принципам работы.
Видео получилось слишком длинным, даже сам не ожидал, и это при том, что еще почти ничего не сказал за ключевые транзисторы и часть даже вырезал, наверное болтаю слишком много:(
Несколько ссылок, на полезные обзоры, которые упоминались в видео.
За последнее десятилетие мы видим ускоренный темп развития электронных устройств. Вместе с ним растут и требования к устройству питания. Линейные регуляторы напряжения имеют низкий КПД и не всегда могут обеспечить требования, предъявляемые к устройству. Схемы с синхронным выпрямителем сегодня получили большое распространение. Номенклатура ИС, выпускаемых различными производителями, очень велика. В данной статье пойдет речь об особенностях использования синхронного ключа в синхронном выпрямителе и будет рассмотренно несколько видов ШИМ-контроллеров компании International Rectifier.
Схема синхронного выпрямителя была разработана очень давно. Для ее построения используются обычные n-канальные полевые транзисторы, только работают они в источниках питания с низким выходным напряжением и заменяют собой выпрямительные диоды. Напряжение сток-исток таких транзисторов обычно невелико, но емкости между сток-исток и затвор-сток весьма и весьма значительны. Характерной особенностью работы полевых транзисторов в качестве синхронных выпрямителей является их работа в четвертом квадранте их вольтамперной характеристики, то есть ток через них протекает в обратном направлении — от истока к стоку. На рис. 1 представлена схема построения синхронного выпрямителя.
Рисунок 1 Схема построения синхронного выпрямителя
Рисунок 2 Блок-схема видов приборов для построения синхронных регуляторов, производимых компанией International Rectifier
Требования к выбору элементов схемы при построении синхронного выпрямителя таковы:
Подводя итог по выбору элементов заметим, что при выборе транзисторов компания рекомендует разработчикам выбирать синхронные ключи с минимальным значением сопротивления.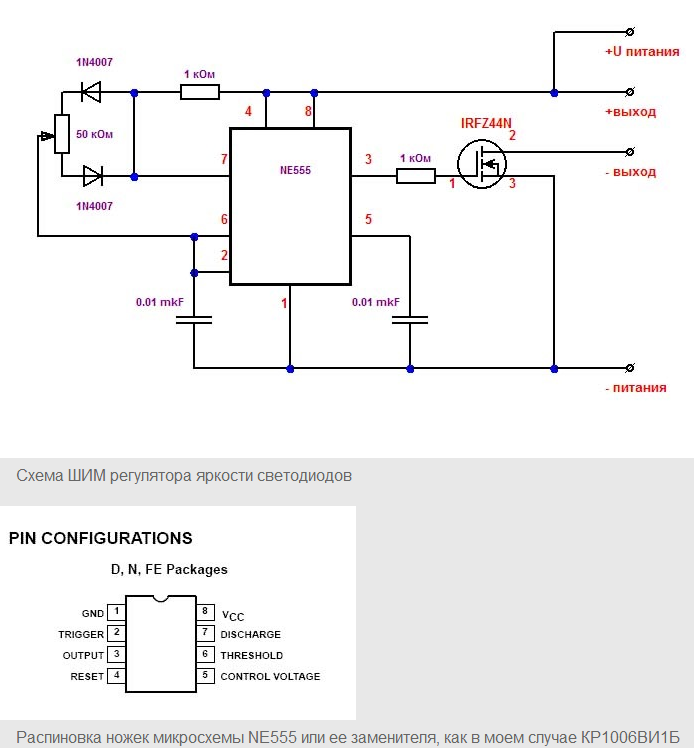 Для коммутирующего ключа необходимо выбирать транзистор с минимальным значением заряда затвора.
Для коммутирующего ключа необходимо выбирать транзистор с минимальным значением заряда затвора.
Компания International Rectifier представляет широкий ряд ИС ШИМ-конт-роллеров с различными функциональными возможностями (см. рис. 2). Семейство импульсных синхронных регуляторов включает интегрированные сборки в монолитных корпусах (SupIRBuck, IPower) и ШИМ-контроллеры без внутренних ключей. Двухканальные сборки представлены, в первом случае, монолитными интегрированными схемами и ШИМ-контроллерами с внутренним линейным опорным преобразователем или без него. Многофазовые системы представлены ИС семейства Х-Fase и I-Power.
Интегральная схема синхронного ШИМ-контроллера IR3651SPBF разработана для высокоэффективных синхронных понижающих DC/DC конверторов с входными напряжениями до 150 В. Программируемые рабочие частоты в диапазоне до 400 кГц позволяют применять микросхему в источниках питания телекоммуникационного оборудования и базовых станций, сетевых серверов, в автомобильных и промышленных блоках управления.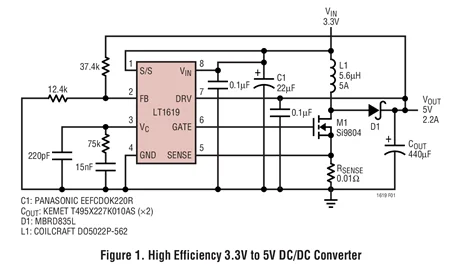 При использовании микросхемы в маломощных устройствах уровень выходного напряжения может быть точно отрегулирован благодаря встроенному источнику опорного напряжения (1.25 В). ИС ШИМ-контроллера IR3651S совместно с парой DirectFET транзисторов обеспечивает эффективность преобразования более 88% при напряжении питания 48 В и выходном напряжении 3.3 В на токе 6 А без применения радиаторов или обдува. Другое преимущество данной ИС перед аналогами, представленными на рынке на сегодняшний день, заключается в повышенном максимальном напряжении питания. ИС разработана по 160-вольтовой HVIC технологии. Это позволяет повысить параметры надежности разработки в целом. ИС ШИМ-контроллера IR3651S разработана для управления двумя внешними N-каналь-ными МОП-транзисторами при их токах управления до 25 А и имеет несколько опций защиты: программируемый плавный запуск, защита по току и блокировка низкого напряжения. ИС имеет также функцию синхронизации для ее согласованной работы на общую фазу. Таким образом, эта микросхема может быть использована как для маломощных (менее 60 Вт) неизолированных DC/DC конверторов сетевого оборудования, так и для мощных (более 200 Вт) каскадов предварительного регулирования в управляемых изолированных конверторах.
При использовании микросхемы в маломощных устройствах уровень выходного напряжения может быть точно отрегулирован благодаря встроенному источнику опорного напряжения (1.25 В). ИС ШИМ-контроллера IR3651S совместно с парой DirectFET транзисторов обеспечивает эффективность преобразования более 88% при напряжении питания 48 В и выходном напряжении 3.3 В на токе 6 А без применения радиаторов или обдува. Другое преимущество данной ИС перед аналогами, представленными на рынке на сегодняшний день, заключается в повышенном максимальном напряжении питания. ИС разработана по 160-вольтовой HVIC технологии. Это позволяет повысить параметры надежности разработки в целом. ИС ШИМ-контроллера IR3651S разработана для управления двумя внешними N-каналь-ными МОП-транзисторами при их токах управления до 25 А и имеет несколько опций защиты: программируемый плавный запуск, защита по току и блокировка низкого напряжения. ИС имеет также функцию синхронизации для ее согласованной работы на общую фазу. Таким образом, эта микросхема может быть использована как для маломощных (менее 60 Вт) неизолированных DC/DC конверторов сетевого оборудования, так и для мощных (более 200 Вт) каскадов предварительного регулирования в управляемых изолированных конверторах.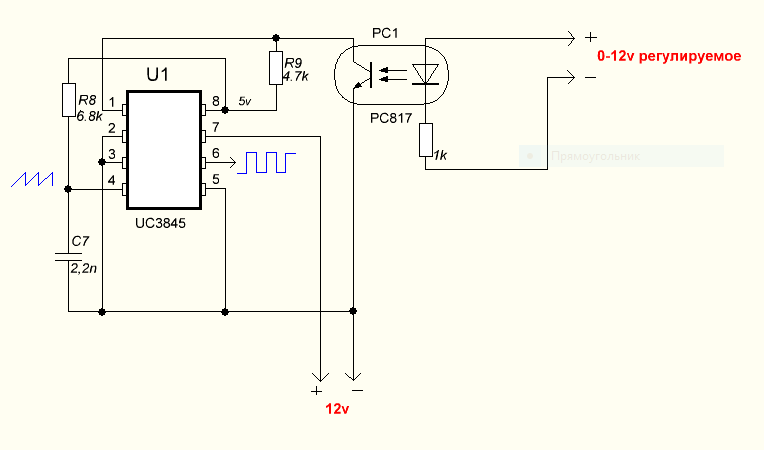 На рис. 3 представлена схема включения ИС IR3651S.
На рис. 3 представлена схема включения ИС IR3651S.
Рисунок 3 Схема включения контроллера IR3651S
Схема 3-фазного ШИМ-контроле-ра для синхронного DC-DC преобразователя IR3094MPbF совместно с использованием транзисторов MOSFET в корпусе DirectFET позволяет сократить на 40 % размеры платы при сравнении с сегодняшними аналогами. Малые размеры контроллера IR3094 идеально подходят для построения компактных синхронных преобразователей для систем с высокой плотностью монтажа. Обычно решения синхронных преобразователей с тремя выходными напряжениями требуют 14 элементов: 3 контроллера, 6 ключей, 3 дросселя, компоненты, обеспечивающие внешнее включение, плюс компоненты обратной связи. Преобразователи, собранные с применением контролера IR3094 и транзисторов MOSFET в корпусе DirectFET, IRF6637 и IRF6678 уменьшают количество элементов преобразователя до 7 единиц.
Три пары транзисторов в корпусе DirectFET могут быть размещены в непосредственной близости с IR3094, создавая решение, которое минимизирует размер печат ной платы и корпуса. Встроенные мощные драйверы контроллера IR3094, объединенные с парой DirectFET транзисторов, в каждой фазе создают решение для управления мощностью с высокой плотностью тока для конверторов типа POL (точка-нагрузка). Контроллер IR3094M разработан для приложений, требующих напряжения питания от 0.85 до 5.1 В. Он размещен в компактном MLPQ корпусе 7 мм? 7 мм и содержит встроенный 3 А драйвер управления ключами, 1 % источник опорного напряжения, установку выходного напряжения по каждой фазе, программируемую частоту переключения до 540 кГц.
Встроенные мощные драйверы контроллера IR3094, объединенные с парой DirectFET транзисторов, в каждой фазе создают решение для управления мощностью с высокой плотностью тока для конверторов типа POL (точка-нагрузка). Контроллер IR3094M разработан для приложений, требующих напряжения питания от 0.85 до 5.1 В. Он размещен в компактном MLPQ корпусе 7 мм? 7 мм и содержит встроенный 3 А драйвер управления ключами, 1 % источник опорного напряжения, установку выходного напряжения по каждой фазе, программируемую частоту переключения до 540 кГц.
Контроллер обеспечивает следующие виды защиты:
- программируемый мягкий старт;
- защита от КЗ в виде икающего тока на выходе каждой фазы;
- защита от перенапряжения;
- выход, сигнализирующий о текущем состоянии контроллера — «power good».
Совместно с данным типом контроллера рекомендуется использовать транзистор IRF6678, который является идеальным синхронным MOSFETом, который показывает низкое значение сопротивления — 1.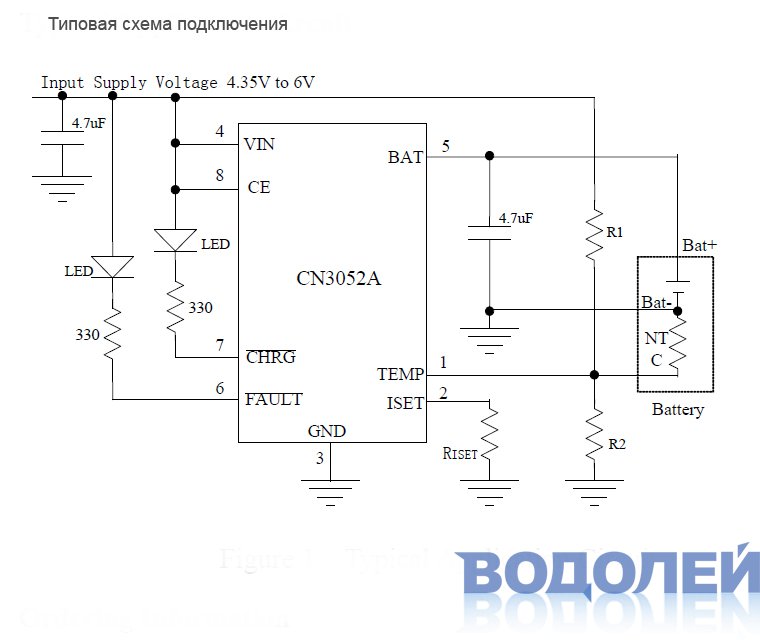 7 мОм –10 В. Транзистор IRF6637 обладает низким значением заряда затвора (4 нКл) и менее подвержен эффекту Миллера, сопротивление перехода составляет 5.7 мОм при 10 В.
7 мОм –10 В. Транзистор IRF6637 обладает низким значением заряда затвора (4 нКл) и менее подвержен эффекту Миллера, сопротивление перехода составляет 5.7 мОм при 10 В.
Для получения точного выходного напряжения с отклонением 1 % компания International Rectifier выпускает ИС IR3637. Ее применяют там, где необходимо высоко качество питающего напряжения. Данная ИС позволяет пользователю работать в диапазоне входного напряжения от 4.5 до 16 В. Основное преимущество данного ШИМ-контроллера — упрощенная конструкция и повышение компактности DC-DC преобразователя. ИС расположена в компактном корпусе SO-8 и обладает такими защитами как защита от короткого замыкания, блокировка по низкому напряжению питания, функция мягкого старта с внешним программированием.
Контроллер обеспечивает скважность ШИМ-сигнала до 85 % на частоте 400 кГц, что позволяет снизить размеры дросселя и улучшить динамические характеристики преобразователя. На рис. 4 представлена схема включения ИС ШИМ-контроллера IR3637.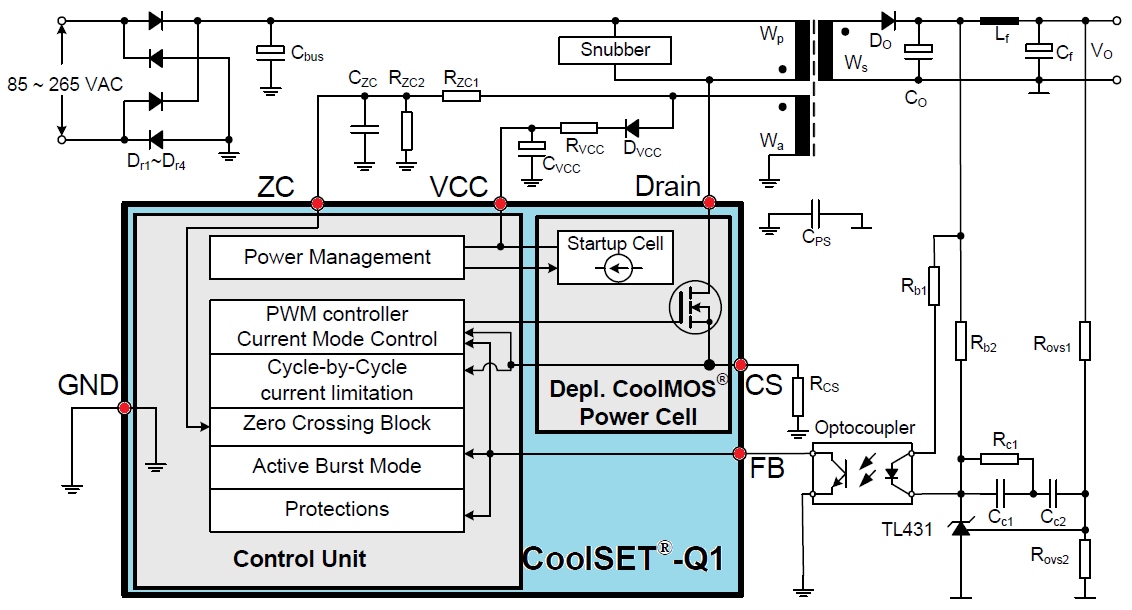
Ранее в приложениях с 12 В входным напряжением разработчики имели недостаточный выбор возможностей и ориентировались в основном на использование интегрированных неизолированных DC-DC преобразователей, занимающих существенно большую площадь. Применение альтернативного решения на дискретных компонентах(новых ШИМ-контроллерах и МОП-транзисторах) позволяет использовать преимущества интеграции схемы конвертора в плату.
При разработке схемы синхронного выпрямления разработчику рекомендуется обратить внимание на три основных момента в разводке цепи земли ШИМ контроллера:
Номенклатура ШИМ-контроллеров и интегрированных сборок на их основе у компании International Rectifier насчитывает более 100 наименований. В табл. 1 приведены основные параметры некоторых ШИМ-контроллеров. Для ускорения разработки синхронного преобразователя напряжения компания International Rectifier представляет на сайте on-line проект для разработчиков My-Power — /engine/api/go.php?go=https://www.irf. com/design-center/mypower/index. html. Здесь разработчик может не только рассчитать параметры схемы и увидеть осциллограммы работы устройства, но также получить рекомендации по типу транзисторов и посмотреть их основные параметры.
html. Здесь разработчик может не только рассчитать параметры схемы и увидеть осциллограммы работы устройства, но также получить рекомендации по типу транзисторов и посмотреть их основные параметры.
·о ·р
Широтно-импульсная модуляция (ШИМ, англ. Pulse-width modulation (PWM) ) — приближение желаемого сигнала (многоуровневого или непрерывного) к действительным бинарным сигналам (с двумя уровнями — вкл /выкл ), так, что, в среднем, за некоторый отрезок времени, их значения равны. Формально, это можно записать так:
,где x (t ) — желаемый входной сигнал в пределе от t1 до t2 , а ∆T i — продолжительность i -го ШИМ импульса, каждого с амплитудой A . ∆T i подбирается таким образом, что суммарные площади (энергии) обеих величин приблизительно равны за достаточно продолжительный промежуток времени, равны так же и средние значения величин за период:
.Управляемыми «уровнями», как правило, являются параметры питания силовой установки, например, напряжение импульсных преобразователей /регуляторов постоянного напряжения/или скорость электродвигателя. Для импульсных источников x (t ) = U const стабилизации.
Для импульсных источников x (t ) = U const стабилизации.
ШИП — широтно-импульсный преобразователь, генерирующий ШИМ-сигнал по заданному значению управляющего напряжения. Основное достоинство ШИМ — высокий КПД его усилителей мощности, который достигается за счёт использования их исключительно в ключевом режиме. Это значительно уменьшает выделение мощности на силовом преобразователе (СП).
Применение
При широтно-импульсной модуляции в качестве несущего колебания используется периодическая последовательность прямоугольных импульсов, а информационным параметром, связанным с дискретным модулирующим сигналом, является длительность этих импульсов. Периодическая последовательность прямоугольных импульсов одинаковой длительности имеет постоянную составляющую, обратно пропорциональную скважности импульсов, то есть прямо пропорциональную их длительности. Пропустив импульсы через ФНЧ с частотой среза , значительно меньшей, чем частота следования импульсов, эту постоянную составляющую можно легко выделить, получив постоянное напряжение. Если длительность импульсов будет различной, ФНЧ выделит медленно меняющееся напряжение, отслеживающее закон изменения длительности импульсов. Таким образом, с помощью ШИМ можно создать несложный ЦАП : значения отсчётов сигнала кодируются длительностью импульсов, а ФНЧ преобразует импульсную последовательность в плавно меняющийся сигнал.
Если длительность импульсов будет различной, ФНЧ выделит медленно меняющееся напряжение, отслеживающее закон изменения длительности импульсов. Таким образом, с помощью ШИМ можно создать несложный ЦАП : значения отсчётов сигнала кодируются длительностью импульсов, а ФНЧ преобразует импульсную последовательность в плавно меняющийся сигнал.
Wikimedia Foundation . 2010 .
FAQ: широтно-импульсная модуляция (ШИМ)
Какова цель широтно-импульсной модуляции (ШИМ)?
В импульсных преобразователяхиспользуется силовой полупроводниковый переключатель (обычно MOSFET) для управления магнитным элементом (трансформатором или катушкой индуктивности), выпрямленный выход которого создает постоянное напряжение. Обычно КПД превышает 90%, что примерно вдвое выше, чем у линейного регулятора.
Импульсный преобразователь изменяет свой выходной постоянный ток в ответ на изменения нагрузки. Одним из широко используемых подходов является широтно-импульсная модуляция (ШИМ), которая управляет выходной мощностью переключателя питания, изменяя его время включения и выключения.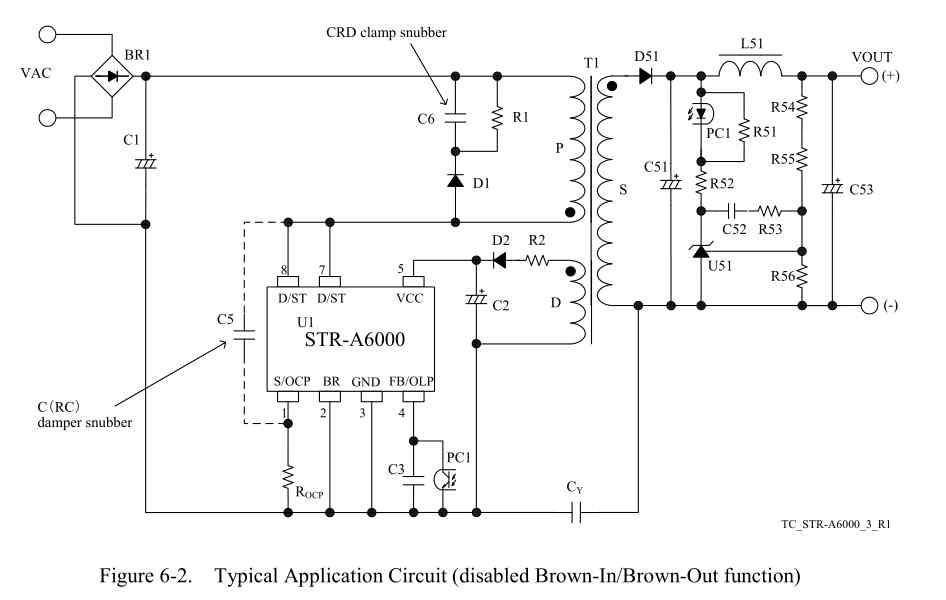 Отношение времени включения к времени периода переключения — это рабочий цикл. На рис. 1 показаны три различных варианта рабочего цикла ШИМ: 10%, 50% и 90%. Рабочий цикл и мощность редко имеют какое-либо отношение друг к другу. Вместо этого рабочий цикл регулируется для регулирования выходного напряжения.
Отношение времени включения к времени периода переключения — это рабочий цикл. На рис. 1 показаны три различных варианта рабочего цикла ШИМ: 10%, 50% и 90%. Рабочий цикл и мощность редко имеют какое-либо отношение друг к другу. Вместо этого рабочий цикл регулируется для регулирования выходного напряжения.
На рис. 2 показан упрощенный ШИМ-контроллер, используемый в импульсном преобразователе. В процессе работы часть выходного постоянного напряжения возвращается в усилитель ошибки, что заставляет компаратор управлять временем включения и выключения ШИМ.Если отфильтрованный выходной сигнал силового полевого МОП-транзистора изменяется, обратная связь регулирует рабочий цикл для поддержания выходного напряжения на желаемом уровне.
Для генерирования ШИМ-сигнала, усилитель ошибки принимает в качестве входного сигнала обратной связи и ссылки стабильное напряжение для получения выходного сигнала, связанный с разностью двух входов. Компаратор сравнивает выходное напряжение усилителя ошибки с линейным нарастанием (пилообразным) от генератора, создавая модулированную ширину импульса. Выход компаратора подается на логическую схему переключения, выход которой поступает на выходной драйвер для внешнего силового MOSFET.Логика переключения обеспечивает возможность включения или отключения сигнала ШИМ, подаваемого на силовой полевой МОП-транзистор.
Выход компаратора подается на логическую схему переключения, выход которой поступает на выходной драйвер для внешнего силового MOSFET.Логика переключения обеспечивает возможность включения или отключения сигнала ШИМ, подаваемого на силовой полевой МОП-транзистор.
Почему схема ШИМ нуждается в компенсации крутизны?
Рабочие циклы ШИМ выше 50% требуют компенсационного линейного изменения, называемого компенсацией наклона, чтобы избежать нестабильности. Более высокие рабочие циклы требуют еще большей компенсации крутизны. То есть, если переключатель PWM включен более чем на 50% периода переключения, необходимо использовать компенсацию крутизны для поддержания стабильности системы. При традиционной компенсации крутизны переключающий преобразователь может стать нестабильным при скважности, приближающейся к 100%, поэтому необходимо использовать специальную компенсацию крутизны. На рис. 3 показан ШИМ-контроллер, который использует компенсацию наклона.
Схема блокировки пониженного напряжения (UVLO) устанавливает рабочий диапазон входного напряжения постоянного тока для ШИМ-контроллера.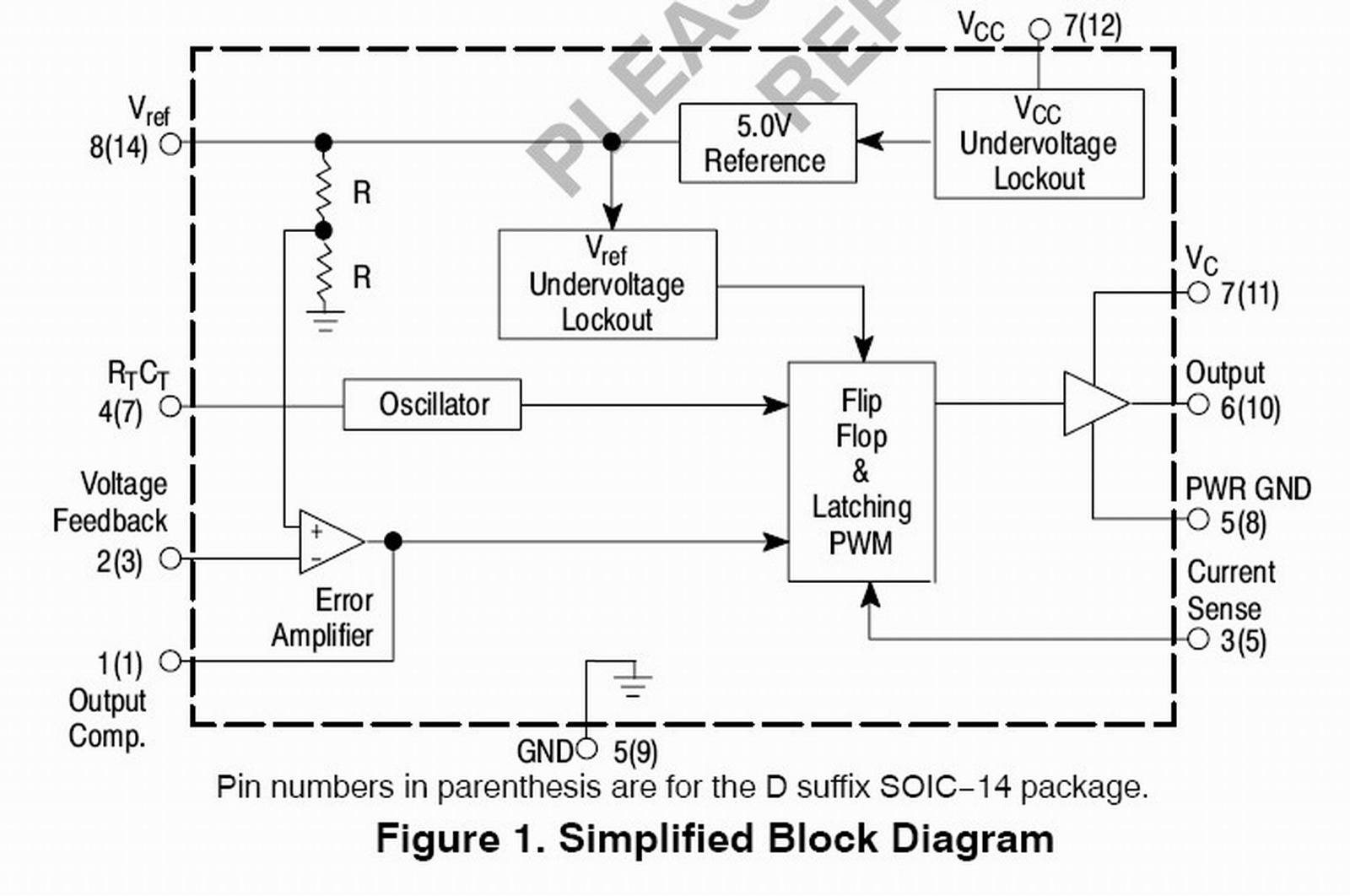 Есть два порога UVLO. При превышении порога включения UVLO включается ШИМ-контроллер. Если входное напряжение постоянного тока падает ниже порога отключения UVLO, ШИМ-контроллер выключается.
Есть два порога UVLO. При превышении порога включения UVLO включается ШИМ-контроллер. Если входное напряжение постоянного тока падает ниже порога отключения UVLO, ШИМ-контроллер выключается.
PWM могут иметь однополярные или двойные выходы. Типы с двумя выходами предназначены для двухтактных, мостовых или синхронных выпрямительных MOSFET.В этих конфигурациях контроллер ШИМ должен либо точно установить мертвое время двух выходов, либо предотвратить их перекрытие. Если оба выхода могут быть включены одновременно, это приведет к увеличению рассеиваемой мощности и электромагнитных помех. Некоторые контроллеры PWM включают специальные схемы для управления мертвым временем или перекрытием.
Большинство микросхем ШИМ-контроллеров обеспечивают токоограничивающую защиту, считывая выходной ток. Если вход считывания тока превышает определенный порог, он завершает текущий цикл (поцикловое ограничение тока).
Компоновка схемы имеет решающее значение при использовании резистора считывания тока, который должен быть типа с низкой индуктивностью.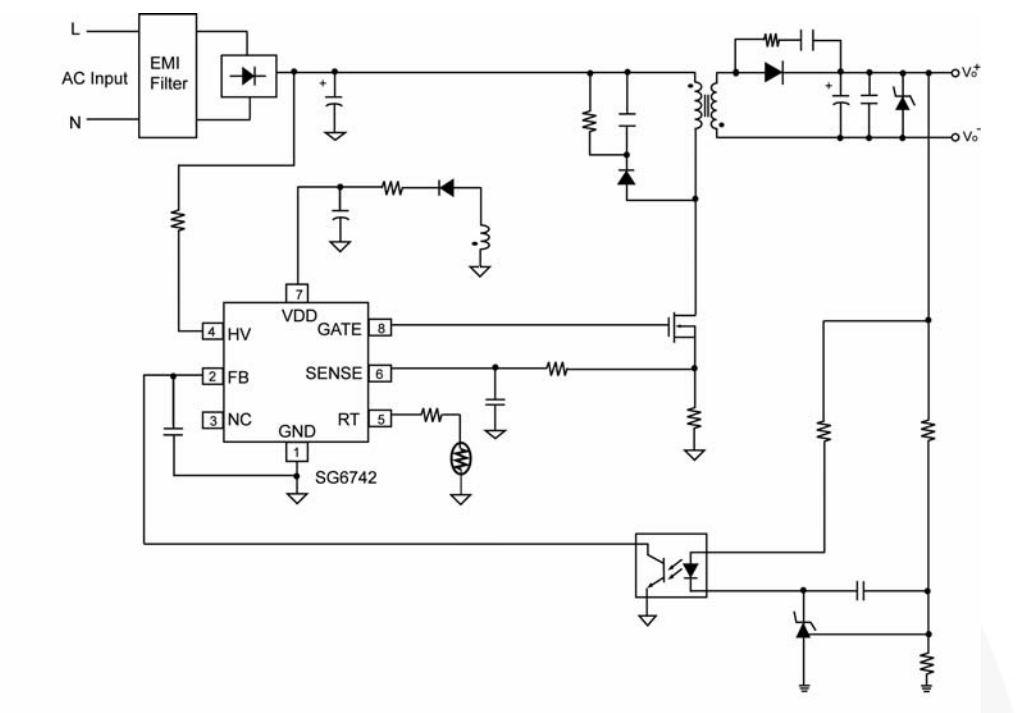 Найдите его и конденсатор фильтра считывания тока очень близко и подключите напрямую к выводу PWM IC. Кроме того, все чувствительные к шуму соединения заземления с низким энергопотреблением должны быть соединены вместе около заземления ИС, а одно соединение должно быть выполнено с заземлением питания (точка заземления сенсорного резистора).
Найдите его и конденсатор фильтра считывания тока очень близко и подключите напрямую к выводу PWM IC. Кроме того, все чувствительные к шуму соединения заземления с низким энергопотреблением должны быть соединены вместе около заземления ИС, а одно соединение должно быть выполнено с заземлением питания (точка заземления сенсорного резистора).
В большинстве ИС ШИМ-контроллеров один внешний резистор или конденсатор устанавливает частоту генератора.Чтобы установить желаемую частоту генератора, используйте уравнение в таблице данных контроллера для расчета номинала резистора.
Некоторые преобразователи PWM включают возможность синхронизации генератора с внешними часами с частотой, которая либо выше, либо ниже частоты внутреннего генератора. Если синхронизация не требуется, подключите вывод синхронизации к земле, чтобы предотвратить шумовые помехи.
Функция плавного пуска позволяет преобразователю мощности постепенно достигать начальной установившейся рабочей точки, тем самым снижая пусковые напряжения и скачки. В большинстве ИС с ШИМ внешний конденсатор определяет время плавного пуска.
В большинстве ИС с ШИМ внешний конденсатор определяет время плавного пуска.
Высокоскоростной широтно-импульсный модулятор
MCP1631 и MCP1631V компанииMicrochip Technology — это высокоскоростные аналоговые ШИМ. В сочетании с микроконтроллером MCP1631 / MCP1631V может управлять рабочим циклом системы питания, обеспечивая выходное напряжение или регулирование тока. Микроконтроллер может использоваться для регулировки выходного напряжения или тока, частоты переключения и максимального рабочего цикла, обеспечивая при этом дополнительные функции, делающие систему питания более интеллектуальной, надежной и адаптируемой.
MCP1631 (управление в режиме тока) и MCP1631V (управление в режиме напряжения) содержит ШИМ, драйвер MOSFET, усилитель считывания тока, усилитель считывания напряжения и компаратор перенапряжения. Эти ИС работают с входным напряжением от 3,0 В до 5,5 В. Дополнительные функции включают отключение, блокировку пониженного напряжения (UVLO) и защиту от перегрева.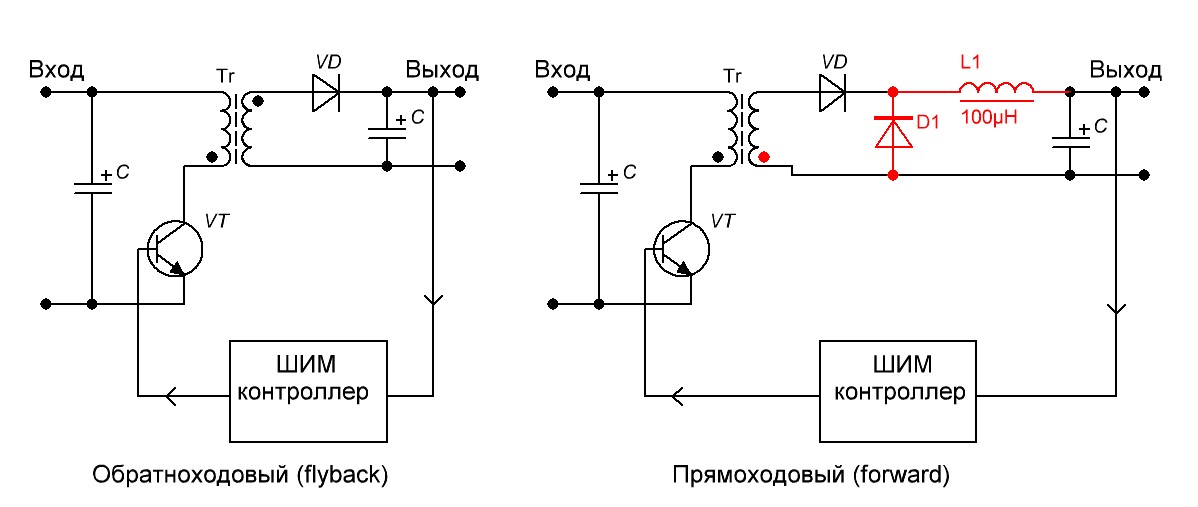
Для приложений, которые работают от входа высокого напряжения, MCP1631HV и MCP1631VHV могут работать напрямую от входа от + 3,5 В до + 16 В. Для этих приложений дополнительный низкий уровень выпадения + 5В или +3.Доступен регулируемый выход 3 В, который может обеспечивать ток до 250 мА для питания микроконтроллера и вспомогательных цепей
Внутренний ШИМ MCP1631 / MCP1631V состоит из усилителя ошибки, высокоскоростного компаратора и защелки. Выход усилителя сравнивается либо с MCP1631 CS (вход первичного измерения тока), либо с MCP1631V VRAMP (вход линейного изменения напряжения) высокоскоростного компаратора. Когда сигнал CS или VRAMP достигает уровня выходного сигнала усилителя ошибки, цикл включения завершается, и внешний переключатель блокируется до начала следующего цикла.
Среди типичных применений для MCP1631 / MCP1631V можно назвать зарядные устройства с программируемым переключателем, способные заряжать различные химические соединения, такие как Li-Ion, NiMH, NiCd и Pb-Acid, сконфигурированные как одиночные или множественные элементы.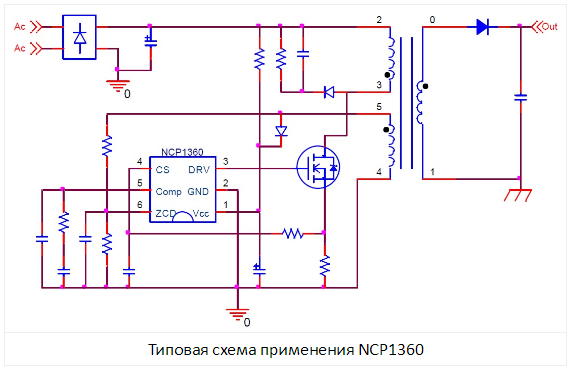 Комбинируя с небольшим микроконтроллером, можно также разработать интеллектуальные конструкции светодиодного освещения и программируемые источники напряжения и тока топологии SEPIC.
Комбинируя с небольшим микроконтроллером, можно также разработать интеллектуальные конструкции светодиодного освещения и программируемые источники напряжения и тока топологии SEPIC.
Входы MCP1631 / MCP1631V могут быть подключены к контактам ввода / вывода микроконтроллера для гибкости проектирования.Дополнительные функции, интегрированные в MCP1631HV / MCP1631VHV, обеспечивают формирование сигнала и функции защиты для зарядных устройств или источников постоянного тока.
Контроллер повышения тока в режиме
Показано на Рис. 3 — это контроллеры Texas Instruments TPS40210 и TPS40211 с широким входом (от 4,5 до 52 В), несинхронные повышающие контроллеры. Они подходят для топологий, которые требуют N-канального полевого транзистора с заземленным источником, включая повышающий, обратный, SEPIC и различные приложения для светодиодных драйверов.
Особенности устройства включают программируемый плавный пуск, защиту от перегрузки по току с автоматическим повторным запуском и программируемую частоту генератора.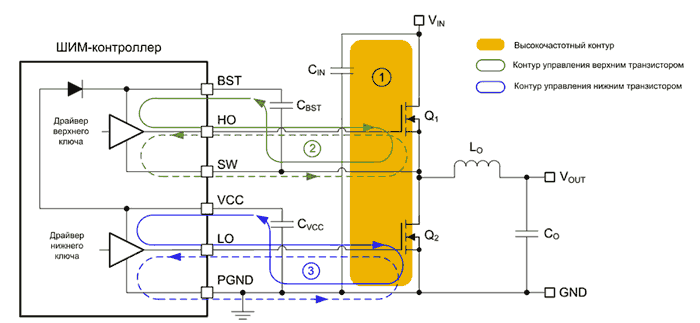 Управление в текущем режиме обеспечивает улучшенную переходную характеристику и упрощенную компенсацию контура. Основное различие между этими двумя частями является опорным напряжением, к которому усилитель ошибки регулирует FB контактный.
Управление в текущем режиме обеспечивает улучшенную переходную характеристику и упрощенную компенсацию контура. Основное различие между этими двумя частями является опорным напряжением, к которому усилитель ошибки регулирует FB контактный.
Резистор и конденсатор, подключенные к выводу RC, определяют частоту генератора. Конденсатор заряжается примерно до VVDD / 20 током, протекающим через резистор, а затем разряжается внутренним транзистором TPS40210.Вы можете синхронизировать TPS40210 и TPS40211 с внешними часами, частота которых должна быть выше, чем частота свободного хода преобразователя.
Контроллеры tps40210 и TPS40211 — это контроллеры режима тока, в которых последовательно с силовым полевым транзистором на клеммах источника используется резистор для измерения тока как для управления режимом тока, так и для защиты от перегрузки по току. Резистор считывания тока служит как ограничителем тока, так и датчиком управления режимом тока, поэтому его следует выбирать на основе как стабильности (ограничение управления в режиме тока), так и ограничения тока (ограничение устройства).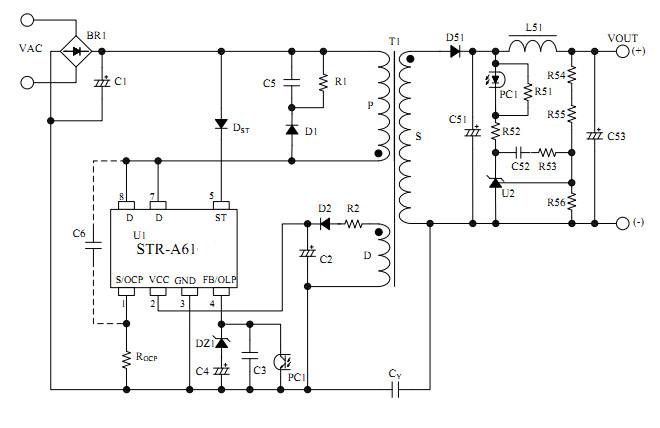
Стандартный повышающий преобразователь не имеет метода ограничения тока от входа к выходу в случае короткого замыкания на выходе. Если требуется защита от этого типа событий, необходимо использовать некоторую вторичную схему защиты.
Характеристикой режима управления пиковым током является состояние, при котором контур регулирования тока становится нестабильным. Контур напряжения поддерживает регулирование, но пульсации выходного напряжения возрастают. и колеблется на половине частоты переключения.
Для исправления этого состояния необходимо применить компенсирующую рампу от генератора к сигналу, поступающему на широтно-импульсный модулятор. В TPS40210 / 11 пилообразный сигнал генератора применяется в фиксированной величине к широтно-импульсному модулятору. Чтобы преобразователь не перешел в состояние субгармонической нестабильности, крутизна сигнала линейного нарастания компенсации должна составлять не менее половины спада сигнала линейного нарастания тока. Поскольку компенсационная рампа является фиксированной, она накладывает ограничение на выбор резистора считывания тока. Наклон компенсации крутизны должен быть не менее половины, а предпочтительно равным крутизне спада формы сигнала измерения тока, наблюдаемой на широтно-импульсном модуляторе.Максимальное значение устанавливается на резистор измерения тока при работе в непрерывном режиме с коэффициентом заполнения 50% или больше.
Наклон компенсации крутизны должен быть не менее половины, а предпочтительно равным крутизне спада формы сигнала измерения тока, наблюдаемой на широтно-импульсном модуляторе.Максимальное значение устанавливается на резистор измерения тока при работе в непрерывном режиме с коэффициентом заполнения 50% или больше.
В целях проектирования следует применить некоторый запас к фактическому значению резистора считывания тока. В качестве отправной точки фактический выбранный резистор должен быть на 80% или меньше, чем номинал резистора, который делает линейную характеристику компенсации крутизны равной половине крутизны спада тока.
Синхронный понижающий ШИМ-контроллер постоянного тока
ADP1828 — это универсальный синхронный понижающий контроллер напряжения с ШИМ-режимом. Он управляет всем N-канальным силовым каскадом для регулирования выходного напряжения от 0,6 В до 85% входного напряжения и рассчитан на работу с большими МОП-транзисторами для стабилизаторов точки нагрузки.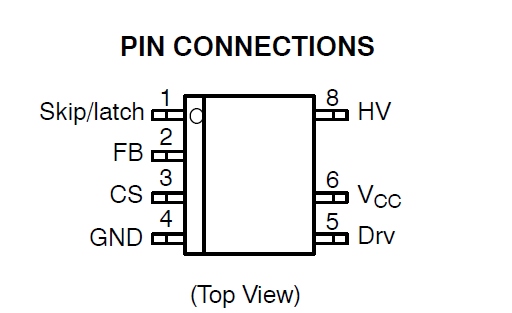 ADP1828 идеально подходит для широкого спектра приложений с высоким энергопотреблением, таких как питание ввода-вывода DSP и ядра процессора, а также универсальное питание в телекоммуникациях, медицинской визуализации, ПК, играх и промышленных приложениях.
ADP1828 идеально подходит для широкого спектра приложений с высоким энергопотреблением, таких как питание ввода-вывода DSP и ядра процессора, а также универсальное питание в телекоммуникациях, медицинской визуализации, ПК, играх и промышленных приложениях.
Показанный на рис. 4 , ADP1828 работает от входных напряжений смещения от 3 до 18 В с внутренним LDO, который генерирует выход 5 В для входных напряжений смещения более 5,5 В. Цепи управления, драйверы затворов и внешний повышающий конденсатор работает от выхода LDO для входного напряжения от 5,5 В до 18 В. PV питает управление затвором (DL) полевого МОП-транзистора нижнего плеча, а IN питает внутреннюю схему управления. Подключите PV к PGND с конденсатором 1 мкФ или более, а с IN на GND с 0.Конденсатор 1 мкФ или больше. Обойдите вход питания в PGND с помощью конденсатора подходящей емкости.
Частота коммутации также может быть синхронизирована с внешними часами до 2-х кратной номинальной частоты генератора. Выход часов можно использовать для синхронизации дополнительных ADP1828 (или контроллеров ADP1829), тем самым устраняя необходимость во внешнем источнике синхронизации.
Выход часов можно использовать для синхронизации дополнительных ADP1828 (или контроллеров ADP1829), тем самым устраняя необходимость во внешнем источнике синхронизации.
ADP1828 включает в себя защиту плавного пуска для ограничения любого пускового тока от входного источника питания во время запуска, защиту от обратного тока во время плавного пуска для предварительно заряженного выхода, а также регулируемую схему ограничения тока без потерь с использованием внешнего измерения RDS (ON) MOSFET .Для приложений, требующих упорядочивания источников питания, ADP1828 предоставляет отслеживающий вход, который позволяет отслеживать выходное напряжение во время запуска, выключения и отказов. Дополнительные функции контроля и управления включают тепловую перегрузку, блокировку при пониженном напряжении и исправное энергопотребление.
ADP1828 работает в диапазоне температур перехода от –40 ° C до + 125 ° C и доступен в 20-выводном корпусе QSOP.
Широтно-импульсная модуляция | Приводы двигателей постоянного тока
Широтно-импульсная модуляция (PWM) использует цифровые сигналы для управления силовыми приложениями, а также его довольно легко преобразовать обратно в аналоговый с минимумом оборудования.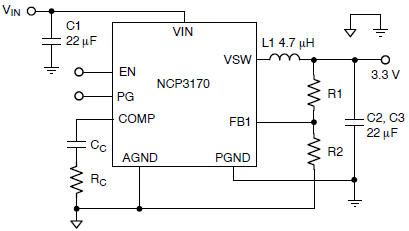
Аналоговые системы, такие как линейные источники питания, как правило, выделяют много тепла, так как они в основном представляют собой переменные резисторы, пропускающие большой ток. Цифровые системы обычно не выделяют столько тепла. Почти все тепло, выделяемое переключающим устройством, происходит во время перехода (что происходит быстро), в то время как устройство не включено и не выключено, а находится между ними. Это потому, что мощность соответствует следующей формуле:
P = E I, или Вт = напряжение X ток
Если напряжение или ток близки к нулю, мощность будет близка к нулю.PWM полностью использует этот факт.
PWM может обладать многими характеристиками аналоговой системы управления в том смысле, что цифровой сигнал может быть свободным. ШИМ не должен захватывать данные, хотя есть исключения из этого для контроллеров более высокого уровня.
Рабочий цикл
Одним из параметров любой прямоугольной волны является скважность. Большинство прямоугольных волн составляют 50%, это норма при их обсуждении, но они не обязательно должны быть симметричными.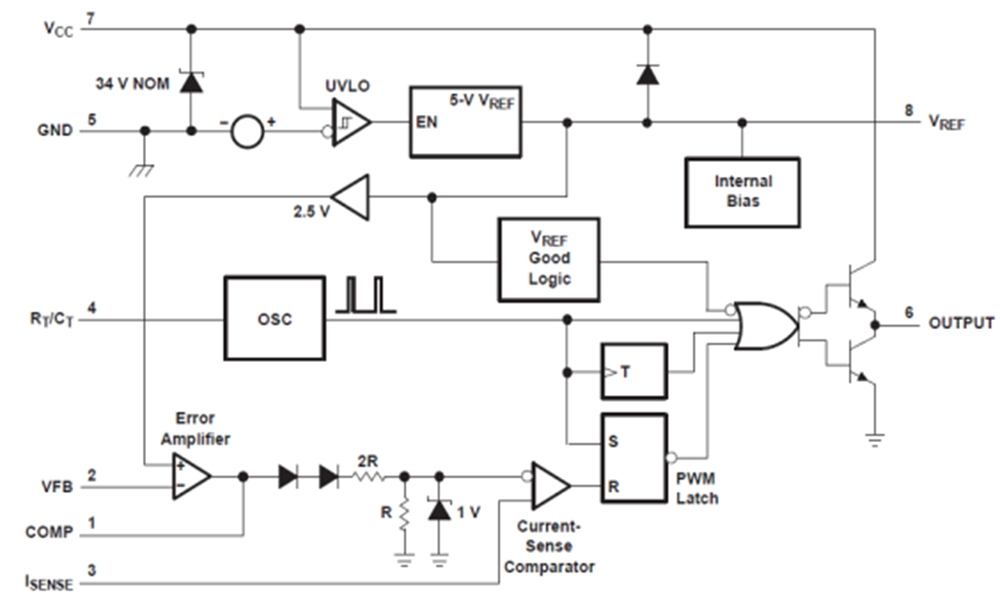 Время включения может быть полностью изменено между выключенным сигналом и полным включением, от 0% до 100% и всеми диапазонами между ними.
Время включения может быть полностью изменено между выключенным сигналом и полным включением, от 0% до 100% и всеми диапазонами между ними.
Ниже показаны примеры рабочего цикла 10%, 50% и 90%. Хотя частота для каждого одинакова, это не является обязательным требованием.
Причина популярности ШИМ проста. Многие нагрузки, такие как резисторы, включают мощность в число, соответствующее процентному соотношению. Преобразование в его аналоговое эквивалентное значение несложно. Светодиоды очень нелинейны в своей реакции на ток, дают светодиоду половину его номинального тока, и вы все равно получаете более половины света, который светодиод может производить.При использовании ШИМ уровень освещенности светодиода очень линейный. Двигатели, о которых будет рассказано позже, также очень хорошо реагируют на ШИМ.
Одним из нескольких способов создания ШИМ является использование пилообразной формы волны и компаратора. Как показано ниже, пилообразная (или треугольная) волна не обязательно должна быть симметричной, но важна линейность формы волны. Частота пилообразного сигнала — это частота дискретизации сигнала.
Частота пилообразного сигнала — это частота дискретизации сигнала.
Если не требуется никаких вычислений, ШИМ может быть быстрым.Ограничивающим фактором является АЧХ компараторов. Это может не быть проблемой, так как довольно часто используется довольно низкая скорость. Некоторые микроконтроллеры имеют встроенный ШИМ и могут записывать или создавать сигналы по запросу.
Использование ШИМ сильно различается. Это сердце усилителей звука класса D. Увеличивая напряжение, вы увеличиваете максимальную мощность, а выбирая частоту, выходящую за пределы человеческого слуха (обычно 44 кГц), можно использовать ШИМ. Динамики не реагируют на высокие частоты, но дублируют низкие частоты, которые являются звуковым сигналом.Более высокие частоты дискретизации могут использоваться для еще большей точности, и 100 кГц или намного выше не являются чем-то необычным.
Еще одно популярное приложение — регулирование скорости двигателя. Двигатели как класс требуют для работы очень больших токов.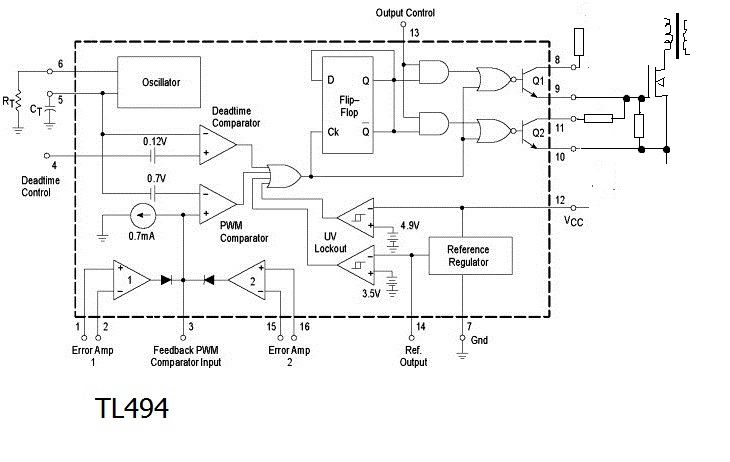 Возможность изменять их скорость с помощью ШИМ значительно увеличивает эффективность всей системы. ШИМ более эффективен при управлении скоростью двигателя на низких оборотах, чем линейные методы.
Возможность изменять их скорость с помощью ШИМ значительно увеличивает эффективность всей системы. ШИМ более эффективен при управлении скоростью двигателя на низких оборотах, чем линейные методы.
Н-мосты
PWM часто используется вместе с H-мостом.Эта конфигурация названа так, потому что она напоминает букву H и позволяет удвоить эффективное напряжение на нагрузке, поскольку источник питания может переключаться с обеих сторон нагрузки. В случае индуктивных нагрузок, таких как двигатели, диоды используются для подавления индуктивных всплесков, которые могут повредить транзисторы. Индуктивность в двигателе также имеет тенденцию отклонять высокочастотную составляющую формы волны. Эта конфигурация также может использоваться с динамиками для аудиоусилителей класса D.
Несмотря на то, что эта схема H-моста в основном точна, она имеет один серьезный недостаток: при переходе между полевыми МОП-транзисторами возможно, что оба транзистора сверху и снизу будут включены одновременно, и на них будет возложена вся нагрузка, которую может обеспечить источник питания.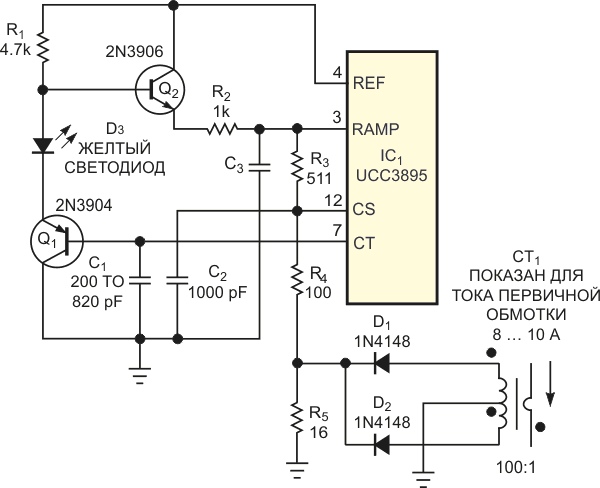 .Это состояние называется прохождением через и может произойти с любым типом транзистора, используемым в H-мосте. Если источник питания достаточно мощный, транзисторы не выживут. Для этого используются драйверы перед транзисторами, которые позволяют одному выключиться, прежде чем позволить другому включиться.
.Это состояние называется прохождением через и может произойти с любым типом транзистора, используемым в H-мосте. Если источник питания достаточно мощный, транзисторы не выживут. Для этого используются драйверы перед транзисторами, которые позволяют одному выключиться, прежде чем позволить другому включиться.
Импульсные источники питания
Импульсные источники питания(SMPS) также могут использовать ШИМ, хотя существуют и другие методы. Добавление топологий, которые используют накопленную мощность как в катушках индуктивности, так и в конденсаторах, после основных коммутирующих компонентов, может значительно повысить эффективность этих устройств, в некоторых случаях превышающую 90%.Ниже приведен пример такой конфигурации.
КПД в данном случае измеряется мощностью. Если у вас есть SMPS с эффективностью 90%, и он преобразует 12 В постоянного тока в 5 В постоянного тока при 10 А, сторона 12 В будет потреблять примерно 4,6 А. Неучтенные 10% (5 Вт) будут отображаться как отходящее тепло. Несмотря на то, что этот тип регулятора немного шумнее, он будет работать намного холоднее, чем его линейный аналог.
Несмотря на то, что этот тип регулятора немного шумнее, он будет работать намного холоднее, чем его линейный аналог.
СВЯЗАННЫЕ РАБОЧИЕ ЛИСТЫ:
Что это такое и как работает?
Цифровые сигналы имеют два положения: включено или выключено, сокращенно интерпретируется как 1 или 0.Аналоговые сигналы, с другой стороны, могут быть включены, выключены, на полпути, две трети пути до включения и бесконечное количество положений от 0 до 1, приближающихся к 1 или нисходящих до нуля. В электронике они используются по-разному, но очень часто должны работать вместе (именно тогда мы называем это «электроникой со смешанными сигналами»). Иногда нам приходится принимать аналоговый (реальный) входной сигнал (например, температуру) в микроконтроллер ( который понимает только цифровой). Часто инженеры переводят этот аналоговый вход в цифровой вход для микроконтроллера (MCU) с помощью аналого-цифрового преобразователя.А как насчет выходов?
PWM — это способ управления аналоговыми устройствами с цифровым выходом.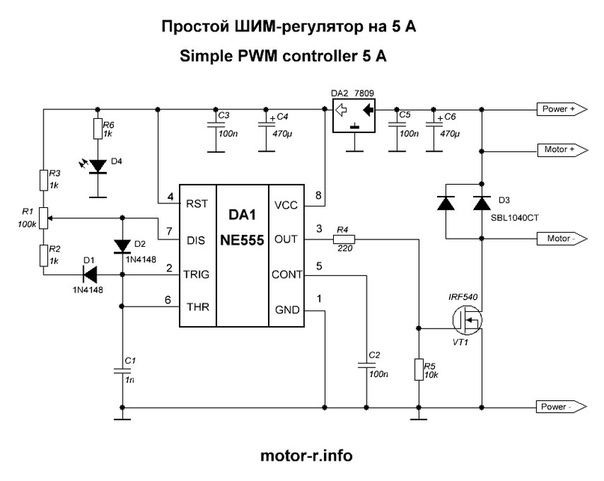 Другими словами, вы можете выводить модулирующий сигнал от цифрового устройства, такого как MCU, для управления аналоговым устройством. Это одно из основных средств, с помощью которых микроконтроллеры управляют аналоговыми устройствами, такими как двигатели с регулируемой скоростью, регулируемые огни, исполнительные механизмы и динамики. Однако ШИМ не является настоящим аналоговым выходом. ШИМ «подделывает» аналогичный результат путем подачи мощности импульсами или короткими всплесками регулируемого напряжения.
Другими словами, вы можете выводить модулирующий сигнал от цифрового устройства, такого как MCU, для управления аналоговым устройством. Это одно из основных средств, с помощью которых микроконтроллеры управляют аналоговыми устройствами, такими как двигатели с регулируемой скоростью, регулируемые огни, исполнительные механизмы и динамики. Однако ШИМ не является настоящим аналоговым выходом. ШИМ «подделывает» аналогичный результат путем подачи мощности импульсами или короткими всплесками регулируемого напряжения.
Примером может служить подача полного напряжения на двигатель или лампу на доли секунды или импульс напряжения на двигатель с интервалами, которые заставляют двигатель или лампу делать то, что вы хотите. На самом деле напряжение прикладывается, а затем снимается много раз за определенный промежуток времени, но вы испытываете аналогичный отклик.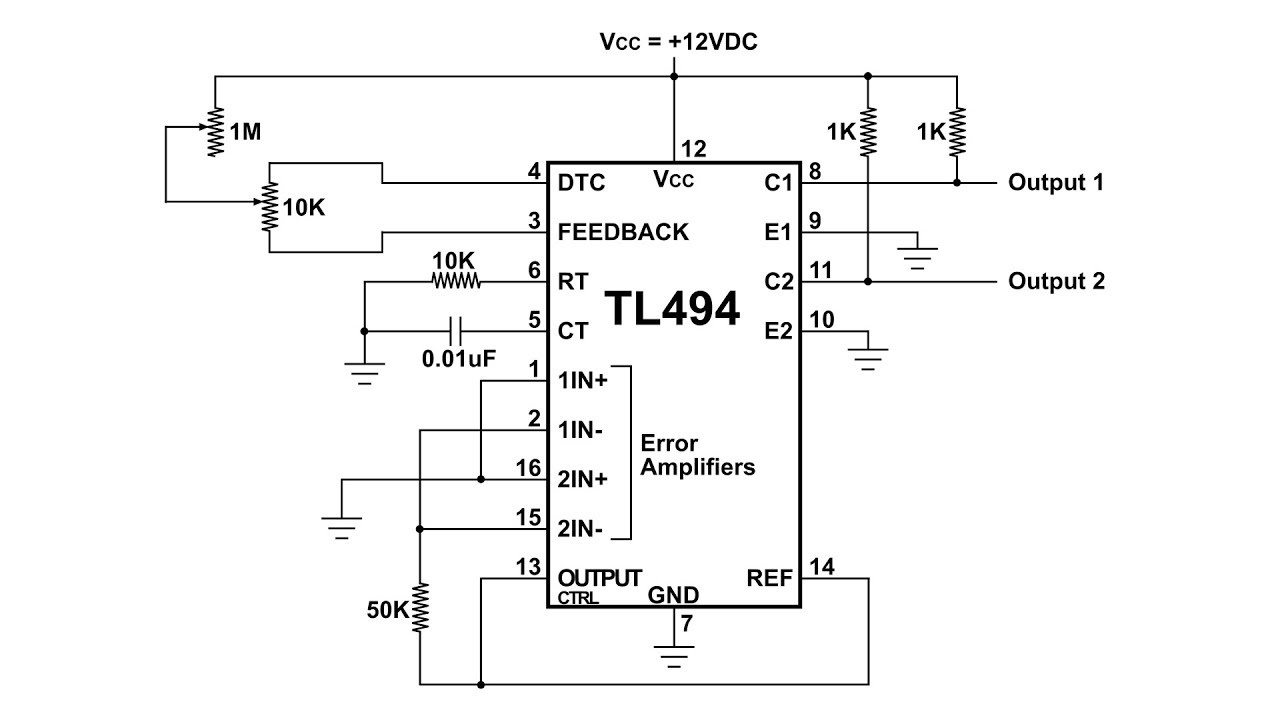 Если вы когда-либо запускали коробочный вентилятор, периодически подавая питание, вы столкнетесь с ШИМ-ответом. Вентилятор и его двигатель не останавливаются мгновенно из-за инерции, поэтому к тому времени, когда вы снова включаете питание, он лишь немного замедляется.
Если вы когда-либо запускали коробочный вентилятор, периодически подавая питание, вы столкнетесь с ШИМ-ответом. Вентилятор и его двигатель не останавливаются мгновенно из-за инерции, поэтому к тому времени, когда вы снова включаете питание, он лишь немного замедляется.
Следовательно, у вас не будет резкой остановки мощности, если двигатель приводится в действие ШИМ. Продолжительность времени, в течение которого импульс находится в заданном состоянии (высокий / низкий), является «шириной» пульсовой волны.
Рисунок 2: Синие линии — это выход ШИМ микроконтроллера, а красная линия — среднее напряжение.В этом случае ширина импульса (и соответствующий рабочий цикл) изменяется так, что среднее напряжение больше похоже на аналоговый выход, который не находится в устойчивом состоянии, как показано на рисунке 1. (Источник: Zureks — собственная работа, CC BY- SA 3.0,) Устройство, управляемое ШИМ, в конечном итоге ведет себя как среднее значение импульсов. Средний уровень напряжения может быть постоянным или подвижным (динамическим / изменяющимся во времени).![]() Чтобы упростить пример, предположим, что ваш вентилятор с ШИМ-приводом имеет высокое напряжение 24 В.Если 50% времени импульс генерируется с высоким уровнем, мы называем это коэффициентом заполнения 50%. Термин рабочий цикл используется повсюду в электронике, но в каждом случае рабочий цикл представляет собой сравнение «включено» и «выключено».
Чтобы упростить пример, предположим, что ваш вентилятор с ШИМ-приводом имеет высокое напряжение 24 В.Если 50% времени импульс генерируется с высоким уровнем, мы называем это коэффициентом заполнения 50%. Термин рабочий цикл используется повсюду в электронике, но в каждом случае рабочий цикл представляет собой сравнение «включено» и «выключено».
Возвращаясь к нашему примеру с двигателем вентилятора, если мы знаем, что высокое напряжение — 24, низкое — 0 В, а рабочий цикл — 50%, то мы можем определить среднее напряжение, умножив рабочий цикл на высокий уровень импульса. Если вы хотите, чтобы двигатель работал быстрее, вы можете установить на выходе ШИМ более высокий рабочий цикл.Чем выше частота высоких импульсов, тем выше среднее напряжение и тем быстрее будет вращаться двигатель вентилятора. ЕСЛИ вы создавали свой собственный выход ШИМ, подключая вентилятор к розетке и вынимая из нее с равными интервалами: 1 секунда в розетку, 1 секунда — выход, то вы действуете как цифровой выход, который управляет вентилятором со стабильным средним значением 12 В. .
.
Аналогия возникает, когда вы увеличиваете частоту включения и выключения розетки так, чтобы она была в розетке только на ½ секунды, а из розетки — на ½ секунды.На данный момент ваш рабочий цикл по-прежнему составляет 50%, но вы увеличили количество циклов в секунду до двух. В электронике мы определяем частоту как количество циклов в секунду или герц (Гц). Вы увеличили скорость вентилятора. Эти ½ секунды — это ширина создаваемого вами импульса.
Вы, наверное, уже догадались, что ШИМ, рабочий цикл и частота взаимосвязаны. Мы используем рабочий цикл и частоту для описания ШИМ, и мы часто говорим о частоте применительно к скорости. Например, двигатель с частотно-регулируемым приводом производит отклик, как аналоговое устройство в реальном мире.Отдельные импульсы, которые получает двигатель VFD, для нас не различимы; насколько мы можем видеть, импульсы настолько быстрые (обычно где-то в миллисекундах), что по стандартам реального мира это просто кажется, как будто двигатель набирает обороты.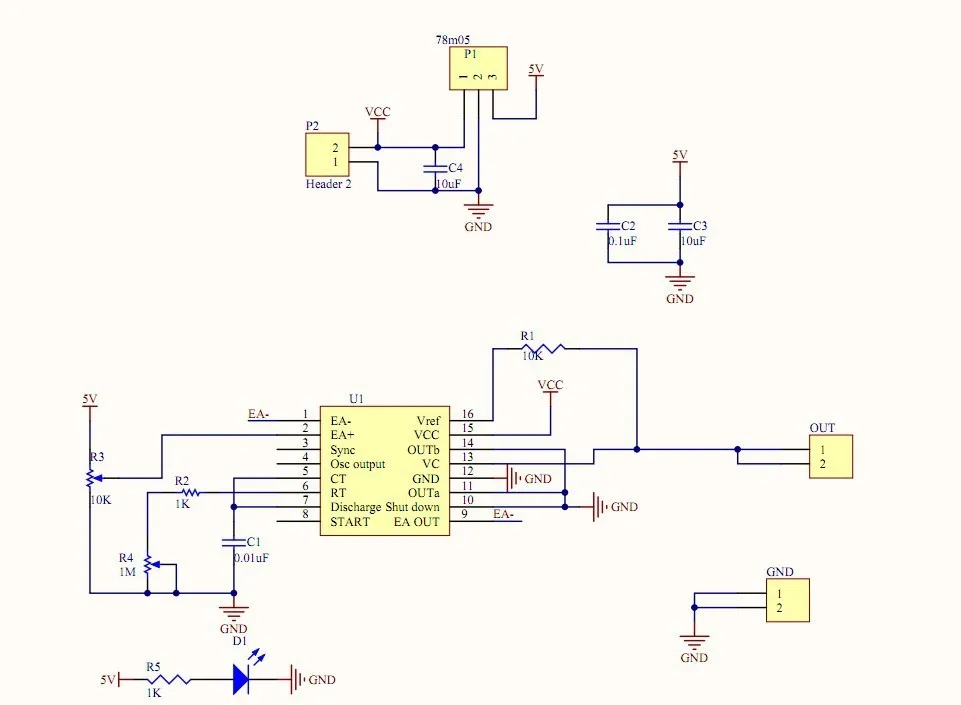
Если вы возьмете рабочий цикл и умножите его на высокий уровень напряжения (который является цифровым состоянием «включено» или «1» для MCU), вы получите средний уровень напряжения, который видит двигатель. в тот момент.
Рабочий циклx уровень высокого напряжения = среднее напряжение
Теперь вставьте слово «мгновенный», и вы поймете, что вещи динамически меняются… что выглядит более аналогично (см. Рисунок 2):
Мгновенный рабочий цикл x уровень высокого напряжения = мгновенное среднее напряжение
Рабочий цикл может измениться, чтобы повлиять на среднее напряжение, которое испытывает двигатель.Частота циклов может увеличиваться. Пульс можно даже увеличить по длине. Все это тоже может происходить вместе, но в целом легче представить себе, что рабочий цикл увеличивается на или частота увеличивается, чтобы увеличить скорость двигателя. (Ширина импульса напрямую связана с рабочим циклом, поэтому, если вы решили увеличить ширину импульса, вы просто измените рабочий цикл. )
)
Единственное, что во всем этом не изменилось, — это высокий уровень напряжения, потому что «on» всегда одинаково для цифрового выхода; простое включение и выключение выхода с разной скоростью и в течение разного времени — вот как можно получить широтно-импульсную модуляцию для имитации аналогового выхода.MCU цифровые. Примером чего-то, что может создать настоящий аналоговый выход, может быть преобразователь (что-то, что напрямую переводит физическое явление в аналоговый сигнал). Но преобразователи — это другое аналоговое обсуждение.
Что такое ШИМ-управление двигателем — 4QD
Что такое широтно-импульсная модуляция? как работает ШИМ-управление двигателем и как выглядит схема ШИМ? На этой странице мы рассмотрим некоторые детали, чтобы объяснить теорию и практику ШИМ-управления двигателем.
Принципы
Для управления скоростью d.c. двигателю нам понадобится переменное напряжение постоянного тока. источник питания. Однако если вы возьмете двигатель 12 В и включите питание, двигатель начнет ускоряться: двигатели не реагируют немедленно, поэтому для достижения полной скорости потребуется небольшое время.![]() Если мы отключим питание когда-то до того, как двигатель достигнет полной скорости, он начнет замедляться. Если мы включим и выключим питание достаточно быстро, двигатель будет работать с некоторой скоростью между нулевой и полной скоростью. Это именно то, что p.w.m. контроллер делает: он включает двигатель серией импульсов.Для управления скоростью двигателя он изменяет (модулирует) ширину импульсов — отсюда и широтно-импульсная модуляция.
Если мы отключим питание когда-то до того, как двигатель достигнет полной скорости, он начнет замедляться. Если мы включим и выключим питание достаточно быстро, двигатель будет работать с некоторой скоростью между нулевой и полной скоростью. Это именно то, что p.w.m. контроллер делает: он включает двигатель серией импульсов.Для управления скоростью двигателя он изменяет (модулирует) ширину импульсов — отсюда и широтно-импульсная модуляция.
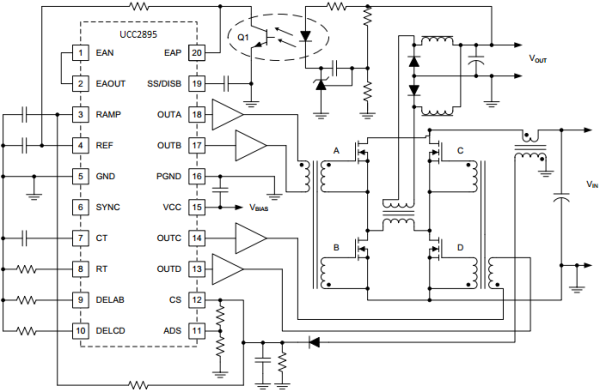 В практическом контроллере низкого напряжения переключатель открывается и закрывается с частотой 20 кГц (20 тысяч раз в секунду). Это слишком быстро для бедного старого двигателя, чтобы даже понять, что он включается и выключается: он думает, что питается от чистого постоянного тока. Напряжение. Это также частота выше слышимого диапазона, поэтому любой шум, издаваемый двигателем, будет неслышным. Он также достаточно медленный, чтобы полевые МОП-транзисторы могли легко переключаться на этой частоте. Однако у двигателя есть индуктивность. Индуктивность не любит изменений тока.Если двигатель потребляет какой-либо ток, то этот ток течет через переключающий MOSFET, когда он включен — но куда он будет течь, когда MOSFET выключится? Читайте и узнайте!
В практическом контроллере низкого напряжения переключатель открывается и закрывается с частотой 20 кГц (20 тысяч раз в секунду). Это слишком быстро для бедного старого двигателя, чтобы даже понять, что он включается и выключается: он думает, что питается от чистого постоянного тока. Напряжение. Это также частота выше слышимого диапазона, поэтому любой шум, издаваемый двигателем, будет неслышным. Он также достаточно медленный, чтобы полевые МОП-транзисторы могли легко переключаться на этой частоте. Однако у двигателя есть индуктивность. Индуктивность не любит изменений тока.Если двигатель потребляет какой-либо ток, то этот ток течет через переключающий MOSFET, когда он включен — но куда он будет течь, когда MOSFET выключится? Читайте и узнайте!Схема управления двигателем с ШИМ
Схема управления двигателем с ШИМ Рассмотрим схему, приведенную выше: на ней показаны полевой МОП-транзистор привода и двигатель. Когда ведущий полевой МОП-транзистор проводит ток, ток течет от положительного полюса батареи, через двигатель и полевой МОП-транзистор (стрелка A) и обратно к отрицательному полюсу батареи. Когда полевой МОП-транзистор отключается, ток двигателя продолжает течь из-за индуктивности двигателя.К двигателю подключен второй полевой МОП-транзистор: полевые МОП-транзисторы действуют как диоды для обратного тока, а это обратный ток через МОП-транзистор, поэтому он проводит. Вы можете использовать такой полевой МОП-транзистор (закоротить его затвор до источника) или использовать силовой диод. Однако не так часто понимаемый факт о полевых МОП-транзисторах заключается в том, что, когда они включены, они проводят ток в любом направлении. Проводящий полевой МОП-транзистор является резистивным по отношению к току в любом направлении, а на МОП-транзисторе с проводящей мощностью на самом деле падает меньше напряжения, чем на диоде с прямым смещением, поэтому полевой МОП-транзистор требует меньше радиатора и расходует меньше энергии батареи.
Когда полевой МОП-транзистор отключается, ток двигателя продолжает течь из-за индуктивности двигателя.К двигателю подключен второй полевой МОП-транзистор: полевые МОП-транзисторы действуют как диоды для обратного тока, а это обратный ток через МОП-транзистор, поэтому он проводит. Вы можете использовать такой полевой МОП-транзистор (закоротить его затвор до источника) или использовать силовой диод. Однако не так часто понимаемый факт о полевых МОП-транзисторах заключается в том, что, когда они включены, они проводят ток в любом направлении. Проводящий полевой МОП-транзистор является резистивным по отношению к току в любом направлении, а на МОП-транзисторе с проводящей мощностью на самом деле падает меньше напряжения, чем на диоде с прямым смещением, поэтому полевой МОП-транзистор требует меньше радиатора и расходует меньше энергии батареи.
Из приведенного выше вы должны увидеть, что если приводной MOSFET включен для 50% рабочего цикла, напряжение двигателя составляет 50% напряжения батареи, и, поскольку ток батареи течет только при включенном MOSFET, ток батареи течет только в течение 50% времени, поэтому средний ток батареи составляет только 50% тока двигателя!
Главный конденсатор
Однако существует проблема: когда MOSFET выключается, он не только прерывает ток двигателя, но также прерывает ток, текущий от батареи. Провода от батареи имеют индуктивность (как и батарея), поэтому, когда этот ток прерывается, эта индуктивность вызывает всплеск напряжения: в цепи основной конденсатор поглощает (большую часть) этот всплеск. Когда приводной полевой МОП-транзистор снова включается, аккумуляторный ток должен течь быстро, чего он не может. Главный конденсатор подает ток во время восстановления тока батареи. В контроллере, способном выдавать 120 ампер, этот конденсатор работает очень тяжело, и, если большой ток потребляется слишком долго (в зависимости от длины провода батареи), главный конденсатор может взорваться! На ранних этапах разработки мы однажды использовали стандартные конденсаторы с проволочным концом и расплавляли провода конденсатора! Конденсаторы имеют провода с медным покрытием из стали , и в системах управления двигателями эти провода могут сильно нагреваться!
Провода от батареи имеют индуктивность (как и батарея), поэтому, когда этот ток прерывается, эта индуктивность вызывает всплеск напряжения: в цепи основной конденсатор поглощает (большую часть) этот всплеск. Когда приводной полевой МОП-транзистор снова включается, аккумуляторный ток должен течь быстро, чего он не может. Главный конденсатор подает ток во время восстановления тока батареи. В контроллере, способном выдавать 120 ампер, этот конденсатор работает очень тяжело, и, если большой ток потребляется слишком долго (в зависимости от длины провода батареи), главный конденсатор может взорваться! На ранних этапах разработки мы однажды использовали стандартные конденсаторы с проволочным концом и расплавляли провода конденсатора! Конденсаторы имеют провода с медным покрытием из стали , и в системах управления двигателями эти провода могут сильно нагреваться!
Из вышесказанного очевидно, что работа этого конденсатора в значительной степени зависит от индуктивности контура проводов батареи. Длинные провода будут иметь высокую индуктивность. Скручивание проводов аккумулятора снижает их индуктивность.
Длинные провода будут иметь высокую индуктивность. Скручивание проводов аккумулятора снижает их индуктивность.
Сопротивление выводов аккумулятора будет иметь эффект, аналогичный индуктивности, поэтому эти провода должны быть толстыми.
Также некоторые люди хотят вставить амперметр в провода батареи. Следует устоять перед соблазном: в частности, простые автомобильные амперметры обладают высокой индуктивностью.
Простые контроллеры (например, используемые для моторизованных сумок для гольфа) обычно не имеют дорогостоящего главного конденсатора и зависят от емкости аккумулятора.Вы можете обойтись без этого — наши ранние Eagle и Egret — такие контроллеры. Однако краткое объяснение эффектов необходимо. Чтобы проиллюстрировать это, представлен график напряжения батареи, который можно увидеть с помощью осциллографа, подключенного непосредственно к источнику питания батареи на клеммах контроллера. Заземление осциллографа находится на отрицательной шине.
Сверху — положительный полюс аккумулятора, вид сверху, внизу — отрицательный полюс двигателя (который переключается контроллером).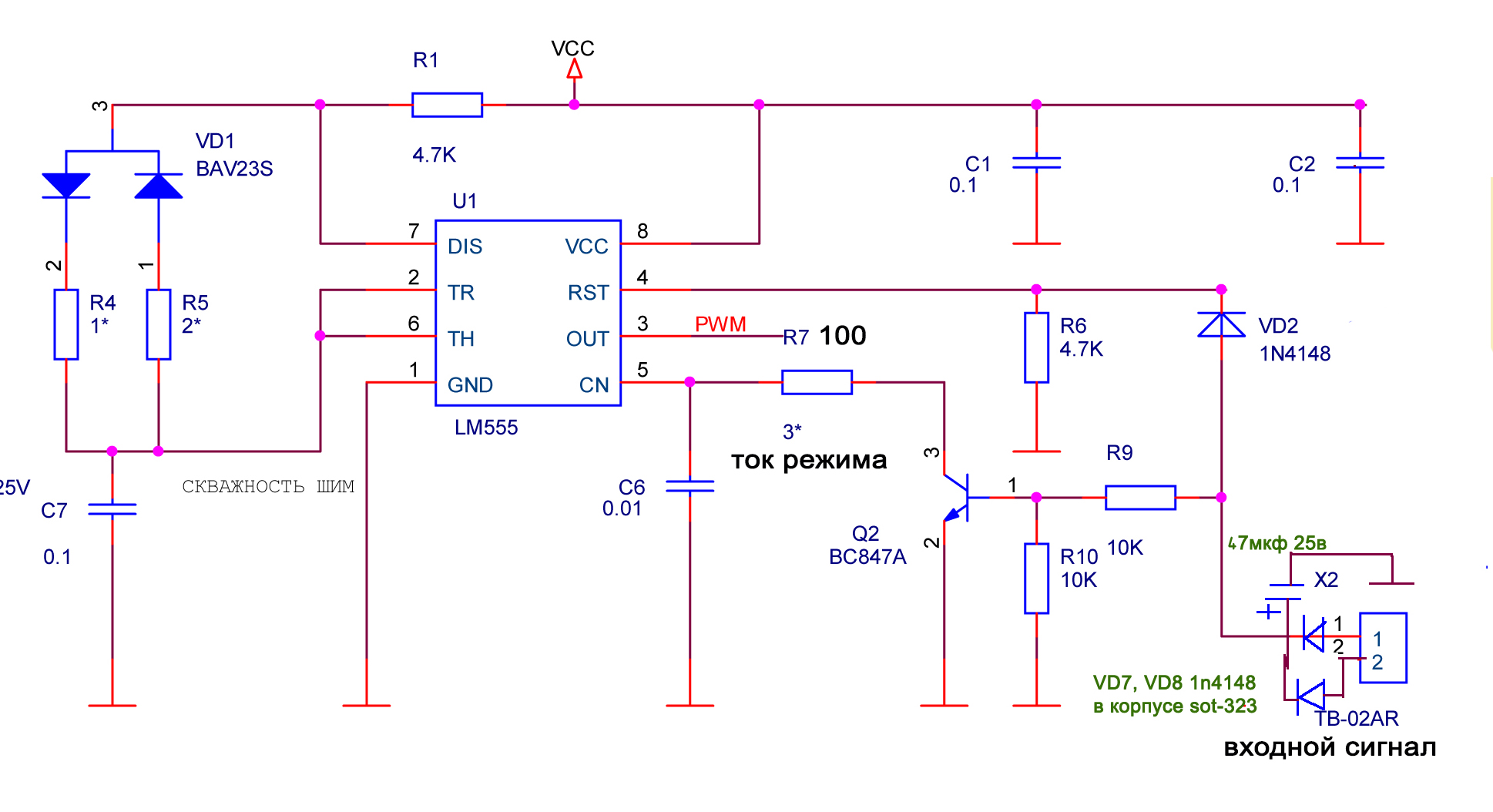 Формы сигналов были сильно очищены, чтобы проиллюстрировать: на практике на осциллограммах много «грязного» звона. Показано напряжение питания 12 В.
Формы сигналов были сильно очищены, чтобы проиллюстрировать: на практике на осциллограммах много «грязного» звона. Показано напряжение питания 12 В.Мы объединяем кривую в точке, где нет тока батареи: выход двигателя высокий, и ток повторно циркулирует в маховике. В точке A включается полевой МОП-транзистор привода контроллера, отвлекая ток двигателя от батареи. Но выводы батареи имеют индуктивность! Ток батареи не может начаться немедленно, поэтому провода батареи упадут до 12 В, и напряжение контроллера гаснет, пока индуктивность свинца не сможет зарядиться, что происходит в пункте B.Время A-B зависит от тока и индуктивности контура батареи и может составлять значительную часть времени цикла!
Затем, в точке C, нижний полевой МОП-транзистор резко выключается, прерывая ток. Ток двигателя не проблема, он продолжает течь, и маховик всегда рядом, чтобы убедиться в этом! Но вы не можете внезапно остановить ток батареи — поэтому он выступает в виде большого скачка напряжения. Этот всплеск нарастает до тех пор, пока что-то не сработает: в этом случае он достигает напряжения лавинного пробоя MOSFET, и MOSFET его фиксирует. Вы можете легко увидеть напряжение зажима с плоской вершиной с помощью осциллографа. МОП-транзисторы рассчитаны на повторяющуюся энергию лавины, и вы должны быть уверены, что 1 / 2Li², хранящийся в индуктивности контура батареи, намного ниже безопасной повторяемой энергии лавины.
Вы можете легко увидеть напряжение зажима с плоской вершиной с помощью осциллографа. МОП-транзисторы рассчитаны на повторяющуюся энергию лавины, и вы должны быть уверены, что 1 / 2Li², хранящийся в индуктивности контура батареи, намного ниже безопасной повторяемой энергии лавины.
Это проблема: вычислить индуктивность контура батареи практически невозможно — даже для инженера. Игроку это сделать — ну, сложно. Таким образом, производитель просто поставляет контроллеры известной группе клиентов, которые используют их стандартными способами и решают проблемы по мере их возникновения на эмпирической основе.Это всегда вопрос нетехнического покупателя, который пытается получить что-то даром: нужен главный конденсатор. Для некоторых приложений вы действительно можете обойтись без! Но это определенно «сходит с рук»!
В контроллерах с главным конденсатором большая часть (но не все) нарушения питания сглаживаются конденсатором. Тем не менее, вы увидите положительный выброс и звон при прерывании тока батареи.![]()
ШИМ и нагрев двигателя
Популярная «сказка старой жены» заключается в том, что ШИМ заставляет двигатель нагреваться больше, чем чистый d.c. Как и большинство старых женских сказок, это исходит из частичной правды, взращенной непониманием. «Миф» возникает из-за того, что, если частота слишком низка для , ток будет прерывистым (или, по крайней мере, переменным в зависимости от формы сигнала ШИМ), потому что индуктивность двигателя не может поддерживать ток должным образом в период отключения сигнала. Таким образом, ток двигателя будет импульсным, а не непрерывным. Средний ток будет определять крутящий момент, но нагрев будет интегралом от квадрата тока (нагрев пропорционален I²R) — «коэффициент формы» тока будет больше единицы.Чем ниже частота, тем выше ток пульсации и сильнее нагрев.
Рассмотрим упрощенный случай, когда ток либо включен, либо выключен. Если ток течет, скажем, 1/3 времени, и вам требуется крутящий момент от двигателя, эквивалентный крутящему моменту, который дает постоянный ток в 1 ампер, то вам явно понадобится средний ток 1 ампер. Для этого при рабочем цикле 33% у вас должно быть 3 ампера (ток течет в течение 1/3 времени).
Для этого при рабочем цикле 33% у вас должно быть 3 ампера (ток течет в течение 1/3 времени).
Теперь ток в 3 ампера даст 9-кратный (я возведен в квадрат) эффект нагрева, равный 1 амперам непрерывно.
Но если 3 ампера протекают только 1/3 от общего времени — значит, нагрев в двигателе в 9 раз за 1/3 времени — или в 3 раза больше, чем устойчивый 1 ампер! Утверждается, что этот сигнал имеет «форм-фактор» 3.
Однако, если частота повторения импульсов достаточно высока, индуктивность двигателя вызовет эффект маховика, и ток станет стабильным. Например, двигатель Lynch имеет индуктивность всего 39 микрогенри (это один из известных мне двигателей с самой низкой индуктивностью) и сопротивление 0.016 Ом. «Постоянная времени» для цепи L-R равна L / R, что (для двигателя Lynch) дает 2,4 мс. Для SEM DPM40P4 (1 кВт) индуктивность составляет 200 микрогенри, а сопротивление — 40 миллиом, что дает постоянную времени 5 мсек.
Как показывает опыт, чтобы избежать излишних математических вычислений, период следования импульсов должен быть значительно короче постоянной времени двигателя.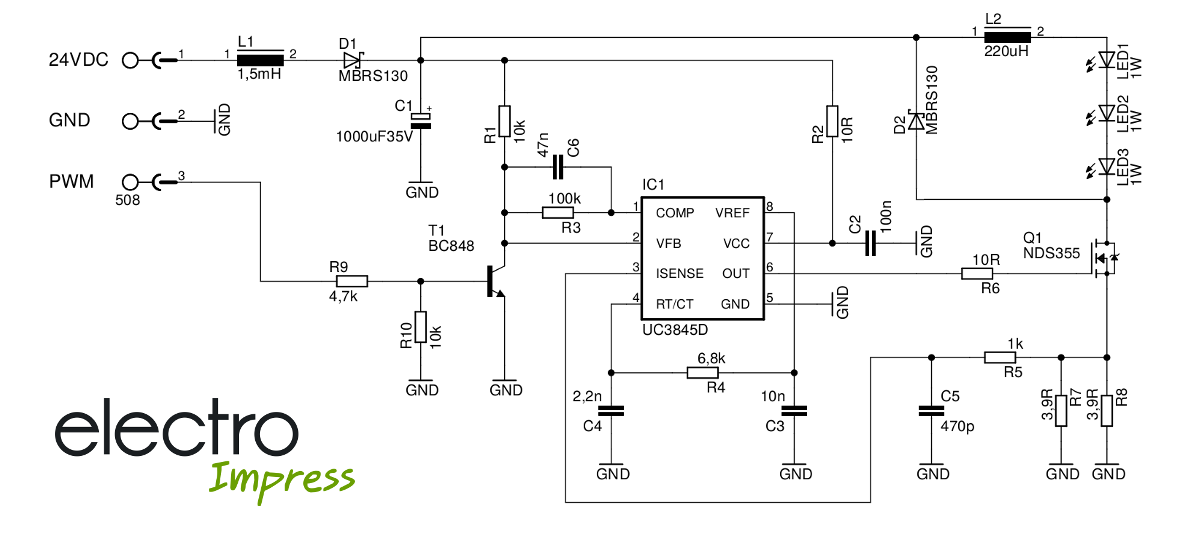
Другими факторами, влияющими на PRF, являются:
Если он находится в звуковом диапазоне, двигатель может издавать вой (вызванный явлением, известным как «магнитострикция», поэтому держитесь выше звукового диапазона.
Схема MOSFET рассеивает больше всего при переключении из одного состояния в другое, поэтому частота не должна быть слишком высокой — MOSFET можно использовать с осторожностью до 100 кГц, но это становится немного выше.
РЧ-излучения: они увеличиваются с увеличением частоты, поэтому сохраняйте частоту как можно ниже!
Очевидно, что трудно выбрать «лучший» компромисс между ними, но оптимальная частота может быть около 20 кГц.
На нашем дочернем сайте 4qdtec есть более подробная версия этой страницы вместе с большим количеством технических деталей.com
Рекламная пауза…. Приходите и ознакомьтесь с полным ассортиментом наших контроллеров!
Как работают контроллеры заряда | altE
Контроллеры заряда
Заряд
контроллер является неотъемлемой частью почти всех энергосистем, которые заряжают
батареи, будь то солнечные панели, ветряные, гидроэнергетические, топливные или
инженерная сеть.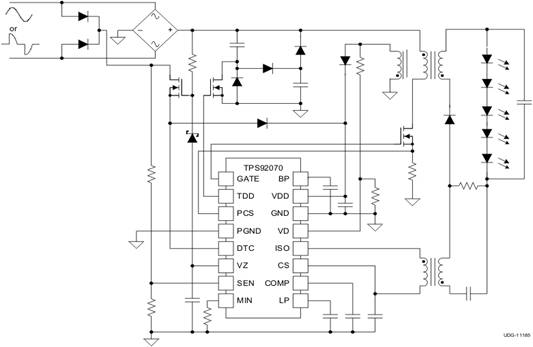 Его цель — правильно хранить батареи глубокого разряда.
сытые и безопасные на долгое время.
Его цель — правильно хранить батареи глубокого разряда.
сытые и безопасные на долгое время.
Основные функции контроллера довольно просты.Блок контроллеров заряда обратный ток и предотвратить перезарядку аккумулятора. Некоторые контроллеры также предотвращают переразряд батареи, защита от электрической перегрузки и / или отображение батареи статус и поток власти. Рассмотрим каждую функцию индивидуально.
Блокирующий обратный токСолнечные панели работать, прокачивая ток через батарею в одном направлении. Ночью панели могут пропускать небольшой ток в обратном направлении, вызывая небольшой разрядка от АКБ.(Наш термин «батарея» означает одну батарею или батарею.) Потенциальная потеря незначительна, но ее легко предотвратить. Некоторые типы ветряных и гидрогенераторов также потребляют обратный ток, когда они остановка (большинство из них, кроме случаев неисправности).
В большинстве контроллеров зарядный ток проходит через полупроводник (транзистор), который действует как вентиль для управления током. Его называют «полупроводником», потому что он пропускает ток только в одном направлении. Он предотвращает обратный ток без каких-либо дополнительных усилий и затрат.
Его называют «полупроводником», потому что он пропускает ток только в одном направлении. Он предотвращает обратный ток без каких-либо дополнительных усилий и затрат.
В некоторых старых контроллерах электромагнитная катушка размыкает и замыкает механический переключатель (называется реле — вы можете услышать, как он включается и выключается). выключено ночью, чтобы заблокировать обратный ток. Эти контроллеры иногда называют как контроллеры шунта вызова.
Если вы используете солнечную батарею только для подзарядки аккумулятора (очень небольшой массив относительно размера аккумулятора), то зарядка может и не понадобиться контроллер. Это редкое приложение. Пример — крошечный модуль обслуживания. который предотвращает разрядку аккумулятора в припаркованном автомобиле, но не поддерживает значительную нагрузки.В этом случае вы можете установить простой диод, чтобы заблокировать обратный ток. Диод, используемый для этой цели, называется «блокирующим диодом».
Предотвращение завышения цен Когда аккумулятор полностью заряжен, он больше не может накапливать поступающую энергию. Если энергия продолжает подаваться с полной скоростью, напряжение батареи становится слишком высоким. Вода разделяется на водород и кислород и быстро пузырится. (Похоже, он кипит, поэтому мы иногда его так называем, хотя на самом деле он не горячий.) Чрезмерная потеря воды и вероятность воспламенения газа и небольшого взрыва. Батарея также быстро разряжается и может перегреться. Избыточное напряжение также может вызвать перегрузку ваших нагрузок (освещение, бытовые приборы и т. Д.) Или вызвать отключение инвертора.
Если энергия продолжает подаваться с полной скоростью, напряжение батареи становится слишком высоким. Вода разделяется на водород и кислород и быстро пузырится. (Похоже, он кипит, поэтому мы иногда его так называем, хотя на самом деле он не горячий.) Чрезмерная потеря воды и вероятность воспламенения газа и небольшого взрыва. Батарея также быстро разряжается и может перегреться. Избыточное напряжение также может вызвать перегрузку ваших нагрузок (освещение, бытовые приборы и т. Д.) Или вызвать отключение инвертора.
Предотвращение перезарядки — это просто вопрос уменьшения потока энергии на
аккумулятор, когда аккумулятор достигает определенного напряжения. Когда напряжение падает
из-за более низкой интенсивности солнечного света или увеличения потребления электроэнергии контроллер
снова позволяет максимально возможный заряд.Это называется «регулировкой напряжения».
Это самая важная функция всех контроллеров заряда. Контроллер
«смотрит» на напряжение, и в ответ регулирует зарядку аккумулятора.
Некоторые контроллеры регулируют поток энергии к батарее, полностью или полностью отключая ток. Это называется «управление включением / выключением». Другие снижают ток постепенно. Это называется «широтно-импульсной модуляцией» (ШИМ). Оба метода хорошо работают при правильной настройке для вашего типа батареи.
A PWM контроллеры заряда солнечных батарей поддерживают постоянное напряжение.Если он имеет двухступенчатое регулирование, он сначала будет поддерживать напряжение до безопасного максимума, чтобы аккумулятор полностью зарядился. Затем он снизит напряжение, чтобы поддерживать «завершающий» или «струйный» заряд. Двухступенчатое регулирование важно для системы, которая может испытывать много дней или недель избытка энергии (или небольшого использования энергии). Он поддерживает полный заряд, но сводит к минимуму потерю воды и стресс.
Напряжения, при которых контроллер изменяет скорость заряда, называются установленными.
точки. При определении идеальных уставок существует некоторый компромисс между
Быстрая зарядка до захода солнца и небольшая перезарядка аккумулятора. Определение уставок зависит от ожидаемых моделей использования,
тип батареи и, в некоторой степени, опыт и философия
системный разработчик или оператор. Некоторые контроллеры имеют регулируемые уставки, а
другие нет.
Определение уставок зависит от ожидаемых моделей использования,
тип батареи и, в некоторой степени, опыт и философия
системный разработчик или оператор. Некоторые контроллеры имеют регулируемые уставки, а
другие нет.
Идеальные уставки напряжения для контроля заряда зависят от температуры батареи. Некоторые контроллеры имеют функцию, называемую «температурной компенсацией». Когда Контроллер обнаруживает низкую температуру батареи, он повышает заданные значения.Иначе когда аккумулятор холодный, он слишком быстро снизит заряд. Если ваши батареи подвергаются перепадам температур более примерно 30 ° F (17 ° C), компенсация необходима.
Некоторые контроллеры имеют встроенный датчик температуры. Такой контроллер должен быть установлен в месте, где температура близка к температуре батарей. У лучших контроллеров есть удаленный датчик температуры на небольшом кабеле. Датчик должен быть подключен непосредственно к батарее, чтобы сообщать о своей температуре контроллеру.
Альтернативой автоматической температурной компенсации является ручная регулировка заданных значений (если возможно) в соответствии с сезоном. Может быть, достаточно делать это только два раза в год, весной и осенью.
Контрольные уставки в зависимости от типа батареиИдеальные уставки для контроля заряда зависят от конструкции аккумулятора. В подавляющем большинстве систем возобновляемой энергетики используются свинцово-кислотные батареи глубокого цикла. либо затопляемого, либо герметичного типа.Залитые батареи залиты с жидкостью. Это стандартные экономичные батареи глубокого разряда.
Герметичные батареи используют пропитанные прокладки между пластинами. Их также называют «регулируемыми клапанами» или «абсорбирующим стекломатом» или просто «необслуживаемыми». Их нужно регулировать до немного более низкого напряжения, чем залитые батареи, иначе они высохнут и выйдут из строя. В некоторых контроллерах есть средства выбора типа батареи.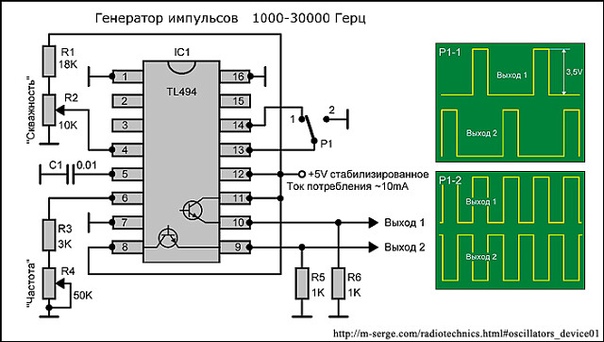 Никогда не используйте контроллер, не предназначенный для аккумулятора вашего типа.
Никогда не используйте контроллер, не предназначенный для аккумулятора вашего типа.
Выключатель низкого напряжения (LVD)
Типичные уставки для свинцово-кислотных аккумуляторов 12 В при 25 ° C (77 ° F)(Типичные значения, представлены здесь только для примера.)
Верхний предел (залитый аккумулятор): 14,4 В
Верхний предел ( герметичный аккумулятор): 14,0 В
Возобновление полной зарядки: 13,0 ВОтключение при низком напряжении: 10,8 В
Повторное подключение: 12,5 ВТемпературная компенсация для аккумулятора 12 В:
-0,03 В на ° C отклонение от стандартного 25 ° C
Глубокий цикл батареи, используемые в системах возобновляемой энергии, предназначены для разряда примерно на 80 процентов.Если они разряжены на 100 процентов, они сразу поврежден. Представьте себе кастрюлю с водой, кипящую на кухонной плите. Момент это высыхает, кастрюля перегревается. Если подождать, пока прекращается пар, значит, он уже слишком поздно!
Точно так же, если вы подождете, пока ваши огни не станут тусклыми, возможно, некоторое повреждение батареи уже произошло. Каждый раз, когда это происходит, емкость и срок службы батареи будут немного уменьшаться. Если аккумулятор находится в таком чрезмерно разряженном состоянии в течение нескольких дней или недель, он может быстро выйти из строя.
Каждый раз, когда это происходит, емкость и срок службы батареи будут немного уменьшаться. Если аккумулятор находится в таком чрезмерно разряженном состоянии в течение нескольких дней или недель, он может быстро выйти из строя.
Единственный способ предотвратить чрезмерный разряд, когда все остальное не работает, — это отключить нагрузки (приборы, освещение и т. Д.), А затем снова подключить их только после восстановления напряжения из-за некоторой значительной зарядки. Когда приближается переразряд, батарея на 12 В падает ниже 11 вольт (батарея на 24 В падает ниже 22 В).
Цепь отключения по низкому напряжению отключает нагрузку при достижении этой уставки. Он будет повторно подключать нагрузки только тогда, когда напряжение батареи существенно восстановится из-за накопления некоторого заряда.Типичная точка сброса LVD составляет 13 В (26 В в системе 24 В).
Все современные инверторы имеют встроенный LVD, даже дешевые карманные. Инвертор
выключится, чтобы защитить себя и свои нагрузки, а также аккумулятор. Обычно,
инвертор подключается непосредственно к батареям, а не через контроллер заряда,
потому что его текущее потребление может быть очень высоким, и потому что он не требует внешнего
LVD.
Если у вас есть нагрузки постоянного тока, у вас должен быть LVD. Некоторые контроллеры заряда имеют один встроенный.Вы также можете приобрести отдельное устройство LVD. Некоторые системы LVD имеют «выключатель милосердия», позволяющий получать минимальное количество энергии, по крайней мере, достаточно долго найти свечи и спички! ОКРУГ КОЛУМБИЯ холодильники имеют встроенный LVD.
Если вы покупаете контроллер заряда со встроенным LVD, убедитесь, что его емкость достаточна для обработки ваших нагрузок постоянного тока. Например, предположим, что вам нужен контроллер заряда для работы с током заряда менее 10 ампер, но у вас есть нагнетательный насос постоянного тока, который потребляет 20 ампер (на короткие периоды) плюс световая нагрузка постоянного тока 6 ампер.Подойдет контроллер заряда с LVD на 30 ампер. Не покупайте контроллер заряда на 10 А, который имеет нагрузочную способность только 10 или 15 А.
Не покупайте контроллер заряда на 10 А, который имеет нагрузочную способность только 10 или 15 А.
Цепь перегружена, когда ток в ней превышает допустимый безопасно обращаться. Это может вызвать перегрев и даже опасность возгорания. Перегрузка может быть вызвано неисправностью (коротким замыканием) в проводке или неисправным прибором (как насос замерзшей воды). Некоторые контроллеры заряда имеют защиту от перегрузки встроенный, обычно с кнопкой сброса.
Может быть полезна встроенная защита от перегрузки, но для большинства систем требуется дополнительная защита в виде предохранителей или автоматических выключателей. Если у вас есть цепь с размером провода, для которого безопасная допустимая нагрузка (допустимая нагрузка) меньше, чем предел перегрузки контроллера, вы должны защитить эту цепь предохранителем или автоматическим выключателем с более низким номинальным током. В любом случае соблюдайте требования производителя и Национальный электротехнический кодекс в отношении любых требований к внешним предохранителям или автоматическим выключателям.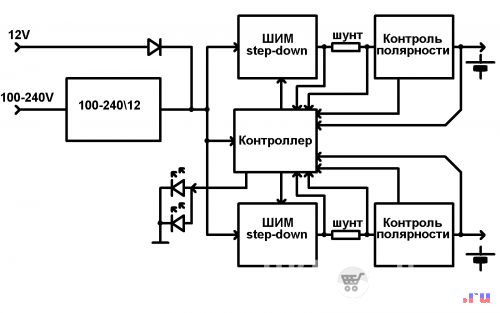
включают в себя множество возможных дисплеев, от одного красного светового индикатора до цифровых дисплеев напряжения и тока. Эти показатели важны и полезны. Представьте себе поездку по стране без приборной панели в машине! Система отображения может отображать поток энергии в систему и из нее, приблизительное состояние заряда аккумулятора и время достижения различных пределов.
Если вам нужен полный и точный мониторинг, потратьте около 200 долларов США на отдельное цифровое устройство, которое включает в себя ампер-час.Он действует как электронный бухгалтер, отслеживая количество энергии, доступной в вашей батарее. Если у вас есть отдельный системный монитор, то не важно, чтобы в самом контроллере заряда были цифровые дисплеи. Даже самая дешевая система должна включать в себя вольтметр как минимальный индикатор работы и состояния системы.
Иметь все с панелью питания Если вы устанавливаете систему для питания современного дома, вам понадобится безопасность. отсечки и межсоединения для работы с большим током.Электрическое оборудование
может быть громоздким, дорогим и трудоемким в установке. Чтобы сделать вещи экономичными
и компактный, получить готовый
«силовой щит». Может включать контроллер заряда с LVD, инвертор
и цифровой мониторинг как опции. Это позволяет электрику легко
связывать основные компоненты системы и соответствовать требованиям безопасности
Национальный электротехнический кодекс или местные органы власти.
отсечки и межсоединения для работы с большим током.Электрическое оборудование
может быть громоздким, дорогим и трудоемким в установке. Чтобы сделать вещи экономичными
и компактный, получить готовый
«силовой щит». Может включать контроллер заряда с LVD, инвертор
и цифровой мониторинг как опции. Это позволяет электрику легко
связывать основные компоненты системы и соответствовать требованиям безопасности
Национальный электротехнический кодекс или местные органы власти.
Контроллер заряда для ветроэлектрической или гидроэлектрической системы зарядки должен защищать аккумуляторы от перезаряда, как и фотоэлектрический контроллер.Тем не менее, нагрузка на генератор должна постоянно поддерживаться, чтобы предотвратить превышение скорости турбины. Вместо того, чтобы отключать генератор от батареи (как большинство фотоэлектрических контроллеров), он направляет избыточную энергию на специальную нагрузку, которая поглощает большую часть энергии от генератора.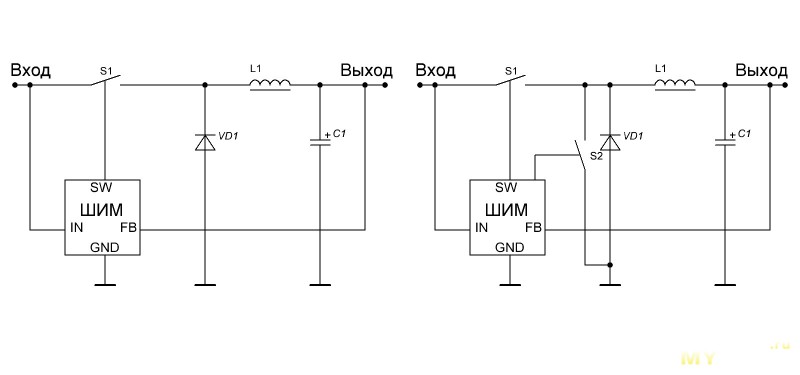 Эта нагрузка обычно представляет собой нагревательный элемент, который «сжигает» избыточную энергию в виде тепла. Если вы можете использовать тепло с пользой, прекрасно!
Эта нагрузка обычно представляет собой нагревательный элемент, который «сжигает» избыточную энергию в виде тепла. Если вы можете использовать тепло с пользой, прекрасно!
Как узнать, что контроллер неисправен? Следите за вольтметром, пока батареи полностью заряжаются.Достигает ли напряжение (но не превышает ли оно) соответствующих уставок для вашего типа батареи? Используйте свои уши и глаза — батареи сильно пузыряются? На верхних частях аккумуляторных батарей скопилось много влаги? Это признаки возможного завышения цен. Получаете ли вы ожидаемую от аккумуляторной батареи емкость? В противном случае может быть проблема с вашим контроллером, и он может повредить ваши батареи.
Заключение Контроль заряда аккумуляторов настолько важен, что большинство производителей высококачественных аккумуляторов (с гарантией на пять лет и более) устанавливают требования к регулированию напряжения, отключению при низком напряжении и температурной компенсации.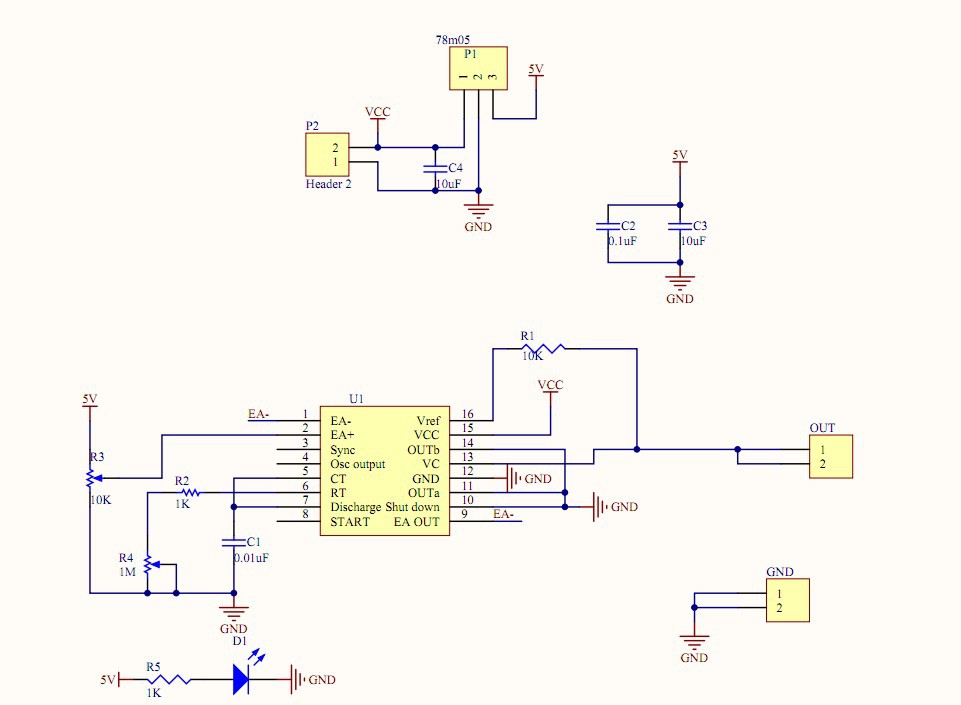 Когда эти ограничения не соблюдаются, обычно батареи выходят из строя менее чем через четверть их обычного ожидаемого срока службы, независимо от их качества или стоимости.
Когда эти ограничения не соблюдаются, обычно батареи выходят из строя менее чем через четверть их обычного ожидаемого срока службы, независимо от их качества или стоимости.
Хороший контроллер заряда стоит недорого по отношению к общей стоимости энергосистемы. И это не очень загадочно. Я надеюсь, что эта статья дала вам базовую информацию, необходимую для правильного выбора элементов управления для вашей системы питания.
широтно-импульсной модуляции (ШИМ) | Видео о круговых навыках Collin Cunningham
ШИМ-контроллер: устройства управления с помощью цифрового сигнала
Автор Коллин КаннингемШиротно-импульсная модуляция (ШИМ) — очень умный способ использования электричества для управления аналоговыми устройствами с помощью цифрового сигнала.Это очень простой метод, который очень эффективен при управлении двигателями, лампами, светодиодами и многим другим!
Прекрасным примером использования ШИМ является то, что вы когда-либо приглушали светодиод с помощью Arduino:
Затухание — Демонстрирует использование функции analogWrite () для затухания и включения светодиода. AnalogWrite использует широтно-импульсную модуляцию (PWM), очень быстро включающую и выключающую цифровой вывод для создания эффекта затухания.
AnalogWrite использует широтно-импульсную модуляцию (PWM), очень быстро включающую и выключающую цифровой вывод для создания эффекта затухания.
Однако вам не нужен микроконтроллер для генерации сигнала ШИМ.Микросхему таймера 555 можно настроить так, чтобы ее выходной рабочий цикл зависел от потенциометра — с помощью некоторых простых схем.
Создайте свой собственный комплект широтно-импульсного модулятора Навыки схемы: видео с широтно-импульсной модуляцией
Для более надежного решения вы можете рассмотреть комплект постоянного тока в широтно-импульсный модулятор, подходящий для передачи тока до 6,5 А и построенный на базе Motorola SG3525 — микросхемы посвященный искусству ШИМ.
Конечно, Коллин отрицал бы свою природу, если бы не упомянул хотя бы одно приложение, связанное со звуком. ШИМ пригодится для генерации простых звуков и мелодий с микроконтроллера.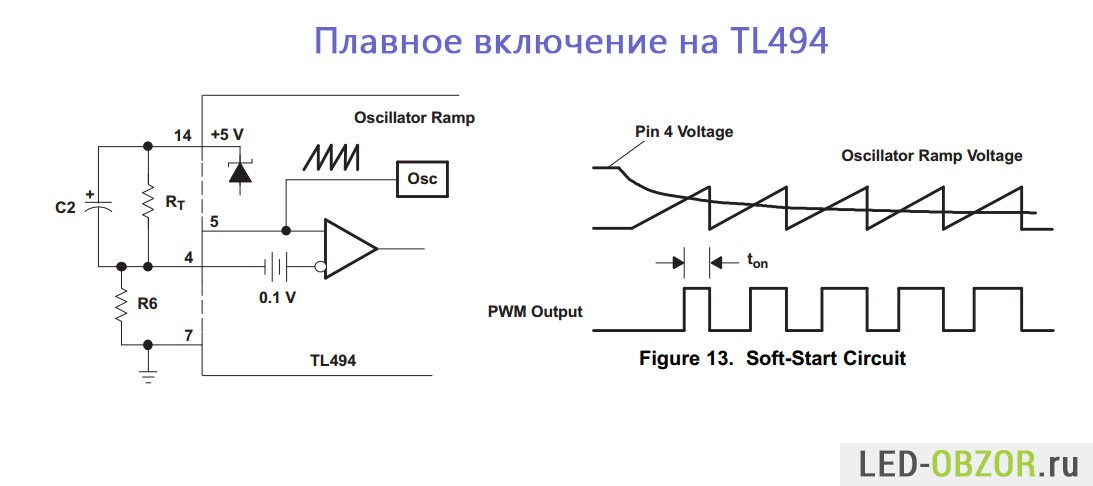
Arduino Simple Sounds
Генератор волновых таблиц мелодий
Щелкните здесь для просмотра технических данных Velleman K8004.
Видео «Сделай сам» по «Другим схемам» от Коллина:
Травление печатной платыФункциональный генератор и корпуса
Инфракрасный световой барьер
Цветной светодиодный орган
Прототипирование перфорированной платы
Блок питания
Устройства для поверхностного монтажа
Волоконная оптика
Комплект светодиодной матрицы
Если вы решите создать модульный комплект постоянного тока в широтно-импульсный, мы хотели бы услышать о ваших результатах! Отправьте свою историю на [адрес электронной почты] Подробнее о контроллерах двигателей с ШИМ
— FIRST Robotics Competition
Подсказка
WPILib имеет обширную поддержку управления двигателем.Существует ряд классов, которые представляют различные типы контроллеров двигателей и сервоприводов. В настоящее время существует два класса контроллеров двигателей: контроллеры двигателей на основе ШИМ и контроллеры двигателей на основе CAN.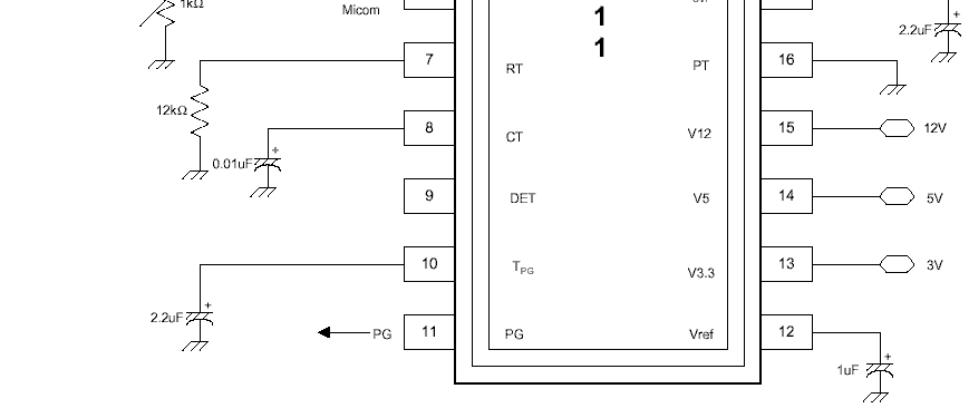 WPILib также содержит составные классы (например, DifferentialDrive), которые позволяют управлять несколькими двигателями с помощью одного объекта. В этой статье будут рассмотрены детали контроллеров двигателей с ШИМ; Контроллеры CAN и составные классы будут рассмотрены в отдельных статьях.
WPILib также содержит составные классы (например, DifferentialDrive), которые позволяют управлять несколькими двигателями с помощью одного объекта. В этой статье будут рассмотрены детали контроллеров двигателей с ШИМ; Контроллеры CAN и составные классы будут рассмотрены в отдельных статьях.
ШИМ-контроллеры, краткая теория работы
Аббревиатура PWM означает широтно-импульсную модуляцию.Для контроллеров двигателей ШИМ может относиться как к входному сигналу, так и к методу, который контроллер использует для управления скоростью двигателя. Для управления скоростью двигателя контроллер должен изменять воспринимаемое входное напряжение двигателя. Для этого контроллер очень быстро включает и выключает полное входное напряжение, изменяя время нахождения в зависимости от управляющего сигнала. Из-за механических и электрических постоянных времени типов двигателей, используемых в FRC®, это быстрое переключение дает эффект, эквивалентный приложению фиксированного более низкого напряжения (переключение 50% дает тот же эффект, что и приложение ~ 6 В).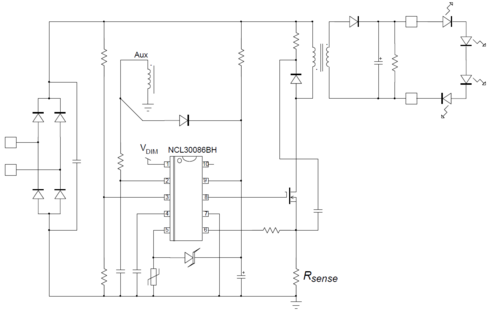
Сигнал ШИМ, который контроллеры используют для входа, немного отличается. Даже на границах диапазона сигнала (максимальное прямое или максимальное обратное) сигнал никогда не приближается к скважности 0% или 100%. Вместо этого контроллеры используют сигнал с периодом 5 мс или 10 мс и шириной импульса в средней точке 1,5 мс. Многие из контроллеров используют типичную синхронизацию контроллера дистанционного управления от 1 мс до 2 мс.
Исходные и масштабированные выходные значения
Как правило, все классы контроллеров мотора в WPILib принимают масштабированный -1.Значение от 0 до 1,0 на выходе для привода. Модуль ШИМ в ПЛИС на roboRIO способен генерировать сигналы ШИМ с периодами 5, 10 или 20 мс и может изменять ширину импульса с 2000 шагов по ~ 0,001 мс каждый около средней точки (1000 шагов в каждом направлении вокруг средней точки. ). Необработанные значения, отправляемые в этот модуль, находятся в диапазоне от 0 до 2000, где 0 является особым случаем, когда сигнал удерживается на низком уровне (отключен). Класс для каждого контроллера мотора содержит информацию о типичных граничных значениях (мин., Макс. И каждая сторона зоны нечувствительности), а также о типичной средней точке.Затем WPILib может использовать эти значения для отображения масштабированного значения в соответствующий диапазон для контроллера мотора. Это позволяет коду плавно переключаться между различными типами контроллеров и абстрагировать детали конкретной сигнализации.
Класс для каждого контроллера мотора содержит информацию о типичных граничных значениях (мин., Макс. И каждая сторона зоны нечувствительности), а также о типичной средней точке.Затем WPILib может использовать эти значения для отображения масштабированного значения в соответствующий диапазон для контроллера мотора. Это позволяет коду плавно переключаться между различными типами контроллеров и абстрагировать детали конкретной сигнализации.
Калибровка контроллеров двигателей
Итак, если WPILib выполняет все это масштабирование, зачем вам вообще нужно калибровать контроллер мотора? Значения, которые WPILib использует для масштабирования, являются приблизительными и основаны на измерении количества выборок каждого типа контроллера.Из-за множества факторов синхронизация отдельного контроллера мотора может незначительно отличаться. Для того, чтобы окончательно устранить «гудение» (сигнал средней точки, интерпретируемый как небольшое движение в одном направлении) и довести контроллер до каждого крайнего положения, по-прежнему рекомендуется откалибровать контроллеры.