
5.11. Пуск в ход трехфазных асинхронных двигателей
5. Асинхронные машины
Ускорение при разгоне, согласно уравнению (5.109), моментов
dΩ dt = (M − Mc ) J | (5.125) |
определяется величиной динамического момента, т. е. разностью абсцисс кривых M и Mc и результирующим моментом инерции J вращающихся масс двигателя и приведенного к его валу механизма, который приводится во вращение. Если в начальный момент пуска M < Mc, двигатель разогнаться не сможет.
При пуске асинхронного двигателя на холостом ходу в активном сопротивлении его вторичной цепи выделяется тепловая энергия, равная кинетической энергии приводимых во вращение маховых масс, а при пуске под нагрузкой количество выделяемой энергии соответственно увеличивается. Выделение энергии в первичной цепи обычно несколько больше, чем во вторичной. При пуске под нагрузкой увеличиваются время разгона двигателя и температура его обмоток.
При частых пусках, а также при весьма тяжелых условиях пуска, когда маховые массы приводимых в движение механизмов велики, возникает опасность перегрева обмоток двигателя. Число пусков асинхронного двигателя в час, допустимое по условиям его нагрева, тем больше, чем меньше его мощность и маховые массы, соединенные с его валом.
Двигатели мощностью 3–10 кВт в обычных условиях допускают до 5–10 включений в час.
Пусковой ток двигателя Iп = (4–7) Iн при сравнительно небольшом (0,9–1,3 Мн) пусковом моменте. Объясняется это следующим. При непод-
вижном роторе наводимая в его обмотке ЭДС максимальна ( е2 = −w2 dΦ0 ), dt
так как максимальна скорость изменения магнитного потока относительно неподвижных проводников обмотки ротора. Велико и значение тока в роторной обмотке:
I2 | = | E2 | . | (5.126) | ||
r 2 | + x2 | |||||
|
|
|
| |||
|
| 2 | 2 |
|
| |
Создаваемый при этом магнитный поток Ф2 достаточно велик, велик и компенсирующий его магнитный поток Ф1, создаваемый реактивной составляющей тока статора I1р, существенно превышающей активную составляющую тока, определяющую величину момента.
Пpи разгоне ротора величина его ЭДС (Е2s = Е20s) уменьшается при уменьшении скольжения, что приводит к уменьшению тока ротора и прежде всего его реактивной составляющей.
studfile.net
Пуск в ход асинхронного двигателя
Прямой пуск — самый распространенный метод пуска асинхронного двигателя с короткозамкнутым ротором. Двигатель подключается непосредственно к питающей сети через пускатель. При этом асинхронный двигатель с короткозамкнутым ротором развивает высокий пусковой крутящий момент с относительно малым временем разгона. Этот метод обычно используется для двигателей малой и средней мощности, которые достигают полной рабочей частоты вращения за короткое время.
Прямой пуск. Этот способ применяют для пуска асинхронных двигателей с короткозамкнутым ротором. Двигатели этого типа малой и средней мощности обычно проектируют так, чтобы при непосредственном подключении обмотки статора к сети возникающие пусковые токи не создавали чрезмерных электродинамических усилий и превышений температуры, опасных с точки зрения механической и термической прочности основных элементов машины.
В асинхронных двигателях отношение L/R сравнительно мало (особенно в малых двигателях), поэтому переходный процесс в момент включения характеризуется весьма быстрым затуханием свободного тока. Это позволяет пренебречь свободным током и учитывать только установившееся значение тока переходного процесса.
Двигатели обычно пускают с помощью электромагнитного выключателя К — магнитного пускателя (рис. 4.27, а) и разгоняют автоматически по естественной механической характеристике М (рис. 4.27,6) от точки П, соответствующей начальному моменту пуска, до точкиР, соответствующей условию М = Мст. Ускорение при разгоне определяется разностью абсцисс кривых М и Мст и моментом инерции ротора двигателя и механизма, который приводится во вращение. Если в начальный момент пуска Мп < Мст , двигатель разогнаться не сможет.
| Рис. 4.27. Схема прямого пуска асинхронного двигателя и графики изменения моментов и тока |
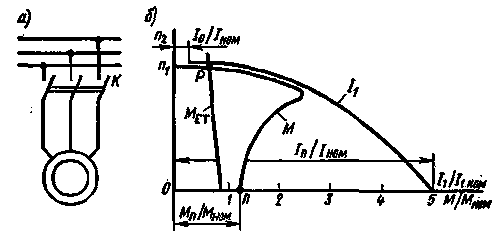
Значение начального пускового момента можно получить из формулы (4.46а), приняв
s =1: (4.58)
Мп = m1 U12R’2 /{w1 [(R1 + R’2 )2 + (X1 + Х’2 )2 ]}.
Отношение моментов Мп /Мном = kп.м называют кратностью начального пускового момента. Для двигателей с короткозамкнутым ротором мощностью 0,6—100 кВт ГОСТом установлено kп.м= 1,0÷2,0; мощностью 100-1000 кВт — kп.м = 0,7÷1,0.
Получение кратностей пускового момента, больших регламентированных ГОСТом, обычно нежелательно, так как это связано либо с увеличением активного сопротивления ротора (см. 4.58), либо с изменением конструкции ротора (см. § 4.11), что ухудшает энергетические показатели двигателя.
Недостатком данного способа пуска кроме сравнительно небольшого пускового момента является также большой бросок пускового тока, в пять — семь раз превышающий номинальное значение тока.
Несмотря на указанные недостатки, пуск двигателя путем непосредственного подключения обмотки статора к сети широко применяют благодаря простоте и хорошим технико-экономическим свойствам двигателя с короткозамкнутым ротором — низкой стоимости и высоким энергетическим показателям (η, cos φ1, kм и др.).
Пуск при пониженном напряжении. Такой пуск применяют для асинхронных двигателей с короткозамкнутым ротором большой мощности, а также для двигателей средней мощности при недостаточно мощных электрических сетях. Понижение напряжения может осуществляться следующими путями:
а) переключением обмотки статора с помощью переключателя с нормальной схемы Δ на пусковую схему Y. При этом напряжение, подаваемое на фазы обмотки статора, уменьшается в √3раз, что обусловливает уменьшение фазных токов в √3 раз и линейных токов в 3 раза. По окончании процесса пуска и разгона двигателя до номинальной частоты вращения обмотку статора переключают обратно на нормальную схему;
|
Рис. 4.28. Схемы включения асинхронного двигателя при пуске с понижением напряжения |
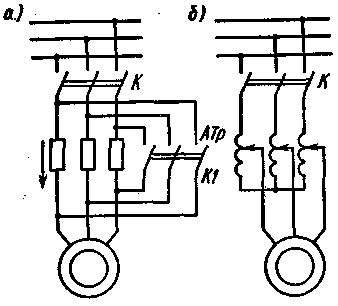
б) включением в цепь обмотки статора на период пуска добавочных активных (резисторов) или реактивных (реакторов) сопротивлений (рис. 4.28, а). При этом на указанных сопротив лениях создаются некоторые падения напряжения ΔUдоб, пропорциональные пусковому току, вследствие чего к обмотке статора подается пониженное напряжение. По мере разгона двигателя снижается ЭДСЕ2s , индуцированная в обмотке ротора, а следовательно, и пусковой ток. В результате уменьшается падение напряжения ΔUдоб на указанных сопротивлениях и автоматически возрастает приложенное к двигателю напряжение. После окончания разгона добавочные резисторы или реакторы замыкаются накоротко контактором К1 ;
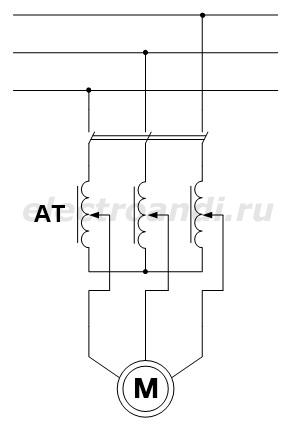
в) подключением двигателя к сети через понижающий автотрансформатор АТр (рис. 4.28,6), который может иметь несколько ступеней, переключаемых в процессе пуска соответствующей аппаратурой.
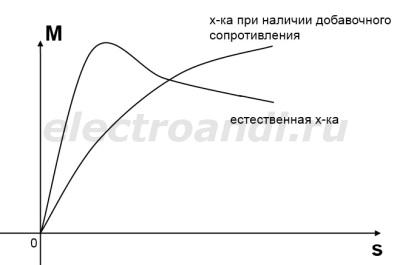
Недостатком указанных методов пуска путем понижения напряжения является значительное уменьшение пускового и максимального моментов двигателя, которые пропорциональны квадрату приложенного напряжения, поэтому их можно использовать только при пуске двигателей без нагрузки.
| Рис. 4.29. Механические характеристики при включении обмотки статора двигателя по схемам Y и Δ (а) и графики изменения М и I1 при пуске двигателя путем переключения обмотки статора со Y на Δ (б) |
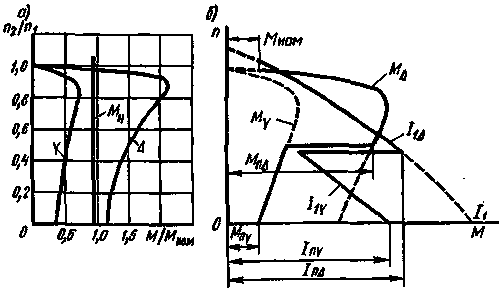
На рис. 4.29 для примера приведены механические характеристики двигателя при номинальном и пониженном напряжении, т. е. при соединении обмотки статора по схемам Y и Δ, а также графики изменения тока I1 и момента М при пуске двигателя путем переключения обмотки статора со Y на Δ. При соединении по схеме Y максимальный и пусковой момент уменьшаются в три раза, вследствие чего двигатель не в состоянии осуществить пуск механизма с нагрузочным моментом Мн.
В момент пуска в ход n=0, т.е. скольжение S=1. Т.к. токи в обмотках ротора и статора зависят от скольжения и возрастают при его увеличении, пусковой ток двигателя в 5 ÷ 8 раз больше его номинального тока
Iпуск=(5÷8)Iн.
Как рассматривалось ранее, из-за большой частоты ЭДС ротора асинхронные двигатели имеют ограниченный пусковой момент
Mпуск=(0,8÷1,8)Mн.
Для пуска в ход двигателя необходимо, чтобы развиваемый им пусковой момент превышая момент нагрузки на валу. В зависимости от мощности источников питания и условий пуска используют разные способы пуска, которые преследуют цели: уменьшение пускового тока и увеличение пускового момента.
Различают следующие способы пуска в ход асинхронных двигателей: прямое включение в цепь, пуск при пониженном напряжении, реостатный пуск, использование двигателей с улучшенными пусковыми свойствами.
2.11.1. Прямое включение в сеть
Это самый простой и самый дешевый способ пуска. На двигатель вручную или с помощью дистанционного управления подается номинальное напряжение. Прямое включение в сеть допускается, если мощность двигателя не превышает 5% от мощности трансформатора, если от него питается и осветительная сеть. Ограничение по мощности объясняется бросками тока в момент пуска, что приводит к снижению напряжения на зажимах вторичных обмоток трансформатора. Если от трансформатора не питается осветительная сеть, то прямое включение в сеть можно применять для двигателей, мощность которых не превышает 25% от мощности трансформатора.
2.11.2. Пуск при пониженном напряжении
Этот способ применяют при пуске в ход мощных двигателей, для которых недопустимо прямое включение в сеть. Для понижения подводимого к обмотке статора напряжения используют дроссели и понижающие автотрансформаторы. После пуска в ход на обмотку статора подается напряжение сети.
Рис. 2.17.б
Понижение
напряжения производят с целью уменьшения
пускового тока, но одновременно, как
это следует из рис. 2.17 и 2.17.б, происходит
уменьшение пускового момента. Если
напряжение при пуске понизить в  раз,
пусковой момент понизится в 3 раза.
Поэтому этот способ пуска можно применять
только при отсутствии нагрузки на валу,
т.е. в режиме холостого хода.
раз,
пусковой момент понизится в 3 раза.
Поэтому этот способ пуска можно применять
только при отсутствии нагрузки на валу,
т.е. в режиме холостого хода.
Если, согласно паспортным данным, двигатель должен включаться в сеть по схеме треугольник, то для снижения пускового тока на время пуска в ход обмотку статора включают по схеме звезда.
Основные недостатки этого способа пуска: высокая стоимость пусковой аппаратуры и невозможность пуска с нагрузкой на валу.
Регулирование частоты вращения асинхронных двигателей
При работе многих механизмов, приводящихся во вращение асинхронными двигателями, в соответствии с технологическими требованиями возникает необходимость регулировать скорость вращения этих механизмов. Способы регулирования частоты (скорости) вращения асинхронных двигателей раскрывает соотношение:
n=(1−S)n0=(1−S)60f/p.
Отсюда следует, что при заданной нагрузке на валу частоту вращения ротора можно регулировать:
изменением скольжения;
изменением числа пар полюсов;
изменением частоты источника питания.
studfile.net
22 Пуск трехфазных асинхронных двигателей с фазным и короткозамкнутым ротором.
Самым простым способом пуска асинхронных двигателей является прямое включение их в сеть. Однако при этом в момент пуска в цепи двигателя возникает большой пусковой ток, который значительно превышает номинальный. В маломощной сети этот ток может вызвать кратковременное понижение напряжения, что отражается на работе других потребителей энергии, включенных в эту сеть. Поэтому непосредственным включением в сеть запускают только двигатели малой мощности. При запуске двигателя большой мощности необходимо уменьшить пусковой ток. Для уменьшения пускового тока используют ряд способов. Рассмотрим некоторые из них.
Запуск двигателей с фазным ротором
Запуск двигателя с фазным ротором уже был кратко рассмотрен в разд. 8.5, а применяемая для этого схема включения изображена на рис. 8.7. Двигатели данного типа обладают очень хорошими пусковыми характеристиками. Для уменьшения пускового тока обмотка ротора замыкается на пусковой реостат. При включении реостата в цепь обмотки ротора ток в этой обмотке уменьшается, а следовательно, уменьшается и ток в обмотке статора, а также ток, потребляемый двигателем от сети.
Таким образом, при включении активного сопротивления в цепь ротора уменьшается пусковой ток и увеличивается пусковой момент. После достижения ротором нормальной скорости реостат полностью выводится, т. е. обмотка ротора замыкается накоротко.
Запуск двигателей с короткозамкнутым ротором
Для уменьшения пускового тока можно на время понизить напряжение на зажимах статора, включив для этого
последовательно с его обмоткой трехфазное индуктивное сопротивление (рис. 8.9).
При
пуске замыкается рубильник Р1,
и к обмоткам статора последовательно
подключаются индуктивности. Это
значительно уменьшает пусковой ток.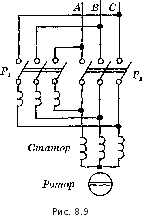
Когда скорость двигателя приближается к номинальной, замыкается рубильник Р2 — он закорачивает катушки индуктивности, и статор включается на полное напряжение сети. Уменьшение пускового тока, вызванное понижением напряжения на статоре, вызывает уменьшение пускового момента пропорционального квадрату напряжения на статоре. Например, при таком пуске уменьшение пускового тока в 2 раза будет сопровождаться уменьшением пускового момента в 4 раза. Для понижения напряжения на статоре вместо индуктивных сопротивлений можно использовать активные сопротивления реостатов, но это менее выгодно, так как связано с дополнительными потерями энергии в реостатах.
Мощные двигатели часто запускают с помощью автотрансформатора (рис. 8.10).
Следовательно, понижение напряжения автотрансформатором в к раз уменьшает пусковой ток в сети в к2 раз. В то же время пусковой момент, пропорциональный квадрату напряжения, уменьшается в k2 раз. Таким образом, благодаря применению автотрансформатора начальный вращающий момент уменьшается пропорционально линейному пусковому току, тогда как при поглощении части напряжения сопротивлением момент уменьшается пропорционально квадрату пускового тока.
Понижение напряжения на статоре на время пуска можно осуществить также посредством временного переключения обмоток статора, нормально работающих при соединении треугольником, на соединение звездой. При пуске обмотки статора соединяются звездой, благодаря чему фазное
напряжение уменьшается в корень из 3-х раз. Во столько же раз уменьшается и фазный пусковой ток:
Таким образом, переключение на звезду уменьшает пусковой линейный ток в 3 раза:
Практически такое переключение выполняется с помощью простого трехполюсного переключателя (рис. 8.11),
Этот
способ запуска может быть применен для
двигателя, обмотки статора которого
при питании от сети данного напряжения
нормально должны быть соединены
треугольником.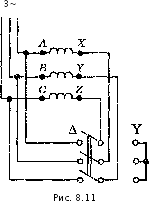
Общим недостатком способов запуска асинхронных двигателей понижением напряжения на статоре и переключением обмоток статора со звезды на треугольник является значительное снижение пускового момента, который пропорционален квадрату фазного напряжения. Поэтому все эти способы запуска можно использовать только в тех случаях, когда двигатель запускается не под полной нагрузкой.
Реверсирование — это изменение направления вращения ротора двигателя. Как известно, направление вращения ротора зависит от направления вращения магнитного поля статора, поэтому для изменения направления вращения ротора следует изменить последовательность фаз (см. разд. 8.3). На практике это осуществляется путем перемены мест любых двух фаз. Для этого часто используют трехполюсные переключатели (рис. 8.12):
studfile.net
Пусковые режимы асинхронных электродвигателей — Zetsila
Момент начала питания электродвигателя напряжением сети сопровождается высоким пусковым током. Поэтому, если участок линии электропередачи относительно слаб, фиксируется снижение напряжения, что оказывает влияние на работу рецептора. Падение напряжения может достигать значительных величин, что также сказывается на функциональности систем освещения. Исключить подобные явления призваны отраслевые правила, которыми запрещается пуск электродвигателей в режиме непосредственного старта, если оборудование выходит за пределы заданной мощности. Следует применять такие пусковые режимы электродвигателей, при которых питающая сеть и периферийное оборудование не испытывают дестабилизации в работе.
СОДЕРЖИМОЕ ПУБЛИКАЦИИ :
Режимы запуска электрических моторов
Существуют и применяются на практике несколько разных режимов пуска асинхронных электродвигателей. Каждый имеет свои плюсы и минусы в зависимости от технических характеристик моторов и нагрузки.
Выбор конкретного режима пуска определяется электрическими, механическими, экономическими факторами. Вид управляемой нагрузки, также является важным фактором выбора режима запуска. Рассмотрим наиболее часто практикуемые варианты пусков.
Прямой пуск свободно вращающегося мотора
Этот режим пуска асинхронного электродвигателя видится самым простым из всех существующих схем. Здесь статор мотора напрямую подключается к источнику питания. Электродвигатель стартует в соответствии с определённой для него характеристикой.
 Схема прямого запуска: 1 — колодка предохранителей; 2 — контактор; 3 — биметаллическое реле; 4 — мотор; 5, 6 — кривые состояния в момент старта
Схема прямого запуска: 1 — колодка предохранителей; 2 — контактор; 3 — биметаллическое реле; 4 — мотор; 5, 6 — кривые состояния в момент стартаКогда имеет место момент включения, электрический мотор, в данном случае, работает подобно вторичной обмотке трансформатора, образованной короткозамкнутым ротором, имеющей крайне малое сопротивление.
На роторе формируется высокий индуцированный ток, превышающий в 5-8 раз номинальный параметр, за счёт чего возрастает пиковый ток в сети питания. Среднее значение пускового момента при этом составляет 0,5-1,5 от номинала.
Несмотря на явные преимущества (простая схема, высокий пусковой момент, быстрый старт, экономия), режим прямого пуска асинхронных моторов видится разумным лишь в следующих обстоятельствах:
- мощность электродвигателя низка по сравнению с мощностью сети и не создаёт помехи от пускового тока;
- привод не нуждается в плавном разгоне или имеет демпфирующее устройство, ограничивающее удар при запуске,
- пусковой момент не влияет на работу ведомой машины или нагрузку, приводимую в движение.
Режим пуска с переключением «звезда-треугольник»
Вариант с переключением схемы обмоток применим только на электродвигателях, где начальные и конечные проводники всех трёх обмоток статора выведены на клеммы БРНО.
Кроме того, обмотка мотора должна иметь исполнение, когда соединение треугольником соответствует сетевому напряжению.
 Схема старта «звезда-треугольник»: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — контактор 3; 5 — биметаллическое реле защиты; 6 — мотор
Схема старта «звезда-треугольник»: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — контактор 3; 5 — биметаллическое реле защиты; 6 — моторНапример, для 3-фазной линейной сети 380В подойдёт электродвигатель с параметрами обмотки 380В – «треугольник» и 660В — «звезда».
Принцип режима пуска асинхронного электродвигателя, для этого варианта заключается в запуске мотора звездообразным подключением обмотки к сетевому трёхфазному напряжению.
Здесь теоретически номинальное напряжение «звезды» электродвигателя делится на корень квадратный из 3 (380В = 660В / √3). Пик пускового тока также делится на 3 и составит:
ПТ = 1,5 — 2,6 НТ (номинальный ток)
Электродвигатель с обмоткой под напряжения 380В / 660В, под номинальное напряжение 660В, потребляет меньше тока в 3,3 раза, чем на соединении «треугольник» при напряжении 380В.
В режиме соединения «звездой» при напряжении 380В, ток вновь делится на √3, учитывая наличие 3 фаз.
Поскольку пусковой момент (ПМ) пропорционален квадратуре значения питающего напряжения, значение ПМ также делится на 3 и составит:
ПМ = 0.2 — 0.5 НПМ (номинальный пусковой момент)
Скорость электродвигателя стабилизируется при балансировке и резистивных крутящих моментах, как правило, на уровне 75-85% от номинальной скорости.
Затем обмотки соединяются «треугольником», после чего электродвигатель восстанавливает рабочие характеристики. Переход от соединения «звезда» на соединение «треугольник», как правило, контролируется таймером.
Контактор «треугольника» закрывается спустя 30-50 миллисекунд после открытия контактора «звезды». Этой последовательностью предотвращается короткое замыкание между фазами.
Течение тока через обмотки нарушается, когда контактор «звезды» открывается и восстанавливается вновь, когда закрывается контактор «треугольника».
В этот момент (сдвиг на «треугольник») формируется короткий, но сильный переходный пик тока по причине противоэлектродвижущей силы электродвигателя.
Каким моторам нужен пуск «звезда – треугольник»?
Режим пуска «звезда – треугольник» подходит для машин с низким резистивным крутящим моментом или когда запуск выполняется без нагрузки.
Для ограничения переходных явлений выше определенного уровня мощности, могут потребоваться дополнительные меры. Например, 1-2-секундная задержка на сдвиг от «звезды» к «треугольнику».
Применение такой задержки по времени способствует ослаблению противоэлектродвижущей силы. Следовательно, уменьшается пиковая составляющая переходного тока.
Однако задержка рекомендуется только в том случае, когда машина имеет достаточную инерцию. Иначе время задержки значительного снижает скорость вращения.
Также применим другой вариант – трёхступенчатый, где выполняется последовательность:
- Соединение «звезда-треугольник».
- Подключение сопротивления.
- Соединение «треугольник».
Разрыв по-прежнему имеет место, но резистор, включенный последовательно с обмотками подключенными «треугольником» в течение примерно трех секунд понижает переходный ток. Так предотвращается нарушение течения тока и образование переходных негативных явлений.
Режим запуска с питанием части обмотки
Подобный вариант режима пуска асинхронного электродвигателя — редкость для России и Европы. Эта схема распространена на североамериканском континенте (для моторов напряжением 230/460В).
 Схема старта путём питания части обмотки статора: 1 — контактор 1; 2 — контактор 2; 3 — мотор; 4 — одна половина обмотки; 5 — вторая половина обмотки
Схема старта путём питания части обмотки статора: 1 — контактор 1; 2 — контактор 2; 3 — мотор; 4 — одна половина обмотки; 5 — вторая половина обмоткиТакие двигатели имеют обмотку статора, разделенную на две параллельные обмотки, с выводом шести или двенадцати концевых проводников. Этот вариант, по сути, эквивалентен двум «половинным моторам» равной мощности.
В режиме запуска один «половинный двигатель» подключается непосредственно к полному напряжению сети. Пусковой ток и крутящий момент делятся примерно на два.
Крутящий момент, однако, существенно больше, чем для электродвигателя с короткозамкнутым ротором равной мощности в режиме пуска «звезда-треугольник».
Конечным этапом режима пуска становится подключение к сети второй обмотки. В этот момент, текущий пиковый ток отмечается низким уровнем и протекает кратковременно, потому что электродвигатель не отключается от сети и уже частично раскручен.
Резистивно-статорный режим пуска
Применение резистивно-статорного режима пуска электродвигателя отмечается пониженным напряжением. Причина понижения — резисторы, включенные последовательно с обмотками статора.
Когда скорость вращения ротора стабилизируется, резисторы отключаются, а статор электродвигателя подключается непосредственно к сети. Как правило, схема выстроена с участием таймера.
Этот режим пуска асинхронных электродвигателей не изменяет соединения статорных обмоток. Поэтому не требуется, чтобы на клеммы колодки БРНО выводились все концевые проводники обмотки.
 Резистивный вариант старта мотора: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — тепловая защита; 5 — запускаемый мотор
Резистивный вариант старта мотора: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — тепловая защита; 5 — запускаемый моторЗначение сопротивления рассчитывается в соответствии с максимальным пиковым током при пуске или минимальным пусковым моментом, необходимым для крутящего момента привода машины. Значения пускового тока и крутящего момента следующие:
ПТ = 4.5 НТ
ПМ = 0,75 НПМ
На этапе ускорения с резисторами, приложенное на клеммах электродвигателя напряжение не является полным, а равно разнице, полученной от величины напряжения сети, минус падение напряжения на сопротивлении.
Падение напряжения пропорционально току потребления электродвигателя. Поскольку ток снижается по мере ускорения вращения ротора мотора, то же самое происходит и при падении напряжения на сопротивлении.
Поэтому напряжение, приложенное на клеммы асинхронного электродвигателя, находится на самом низком уровне при запуске, а затем постепенно увеличивается.
Поскольку крутящий момент пропорционален квадрату напряжения на клеммах мотора, этот момент увеличивается быстрее, чем при пуске в режиме «звезда-треугольник», где напряжение остается постоянным на всём протяжении времени, пока действует подключение «звездой».
Таким образом, резистивно-статорный режим пуска подходит для машин с резистивным крутящим моментом, который увеличивается с набором скорости. Такой пуск оптимален для оборудования, подобного вентиляторам и центробежным насосам.
Однако есть недостаток — довольно высокий пиковый ток на запуске. Снижение тока возможно увеличением сопротивления. Но увеличение значения сопротивления грозит падением напряжения на клеммах электродвигателя и, как следствие, приводит к резкому снижению пускового момента.
Режим автотрансформаторного пуска
Режим автотрансформаторного пуска асинхронного электродвигателя характерен способом питания. На мотор подводится пониженное напряжение, благодаря автотрансформатору.
 Автотрансформаторная схема: 1 — контактор 1; 2 — тепловая защита; 3 — контактор 2; 4 — контактор 3; 5 — автотрансформатор; 6 — контактор 4; 7 — мотор
Автотрансформаторная схема: 1 — контактор 1; 2 — тепловая защита; 3 — контактор 2; 4 — контактор 3; 5 — автотрансформатор; 6 — контактор 4; 7 — моторПо завершению процесса старта автотрансформатор отключается. Пуск выполняется в три этапа:
- Автотрансформатор подключается к обмоткам мотора, соединённым «звездой». Понижение напряжения регулируется коэффициентом трансформации путём автоматического выбора оптимального отношения.
- Режим «звезды» остаётся активным до перехода на полное напряжение. Питание осуществляется через часть катушки индуктивности, соединённой последовательно с обмоткой электродвигателя. Операция продолжается до набора оптимальной скорости вращения.
- Полное соединение. На эту часть процесса отводятся миллисекунды. Часть обмотки автотрансформатора, последовательно включенной с двигателем, замыкается накоротко, после чего автотрансформатор отключается.
Пусковой процесс проходит без фактора разрыва прохождения тока в обмотках электродвигателя. Поэтому переходные явления по причине разрывов отсутствуют.
Между тем если не соблюдать определённые меры предосторожности, подобные явления переходного процесса могут появляться при подключении полного напряжения.
Этот дефект обусловлен высоким значением индуктивности, включенной последовательно с двигателем, по сравнению с режимом работы мотора на всём протяжении времени подключения «звездой».
Отмечается резкое падение напряжения, чем вызывается высокий рост переходного тока при подключении полного напряжения. Чтобы преодолеть этот недостаток, магнитная цепь автотрансформатора выполняется с воздушным зазором.
Наличие такого зазора способствует снижению значения индуктивности. Это значение рассчитывается для предотвращения изменения напряжения на клеммах электродвигателя, когда осуществляется переход на второй шаг процесса пуска.
Воздушный зазор вызывает увеличение тока намагничивания катушки автотрансформатора. Ток намагничивания увеличивает пусковой ток электросети при включении автотрансформатора.
Автотрансформаторный режим пуска обычно используется при эксплуатации двигателей мощностью более 150 кВт. Подобные схемы считаются экономически невыгодными по причине высокой стоимости автотрансформатора.
Режим пуска асинхронных двигателей с фазным ротором
Нельзя запускать асинхронный электродвигатель с фазным ротором сразу после короткого замыкания роторных обмоток. Этот метод приводит к появлению предельных пиковых токов.
 Старт для мотора с фазным ротором: 1 — предохранительный блок; 2 — защита; 3, 7, 8, 9 — контакторы; 4, 5, 6 — ограничительные резисторы: 10 — мотор с фазным ротором
Старт для мотора с фазным ротором: 1 — предохранительный блок; 2 — защита; 3, 7, 8, 9 — контакторы; 4, 5, 6 — ограничительные резисторы: 10 — мотор с фазным роторомНеобходимо использовать резисторы в цепях питания ротора. Замыкать роторные обмотки следует постепенно, по мере набора статором полного сетевого напряжения.
Сопротивление на каждой фазе необходимо рассчитывать с учётом точного определения кривой крутящего момента. В результате расчётное сопротивление полностью включается при запуске и замыкается накоротко только при достижении ротором полной скорости вращения.
Режим пуска электродвигателя с фазным ротором является лучшим выбором для всех случаев, когда пиковые токи машин должны быть низкими, а запуск осуществляется при полной нагрузке.
Такой пуск обладает чрезвычайно плавным ходом, так как достаточно легко регулировать количество и форму кривых, представляющих собой последовательные шаги по механическим и электрическим требованиям (резистивный крутящий момент, значение ускорения, максимальный пик тока и т. д.).
Режим плавного пуска: «запуск с замедлением»
Один из эффективных стартовых режимов, подходящих для плавного пуска и останова электродвигателя. Применяется с целью ограничение тока, регулировки крутящего момента.
Контроль по ограничению тока устанавливается на максимум (кратность 3-4 от номинала) при пуске, чем снижается характеристика крутящего момента. Этот способ удачно подходит для центробежных насосов, вентиляторов и т.п.
Регулирование с помощью настройки крутящего момента оптимизирует крутящие моменты в процессе пуска и снижает пусковой ток.
 Схемный вариант разводки для обеспечения старта при условии каскадного объединения электрических моторов
Схемный вариант разводки для обеспечения старта при условии каскадного объединения электрических моторовТакой режим оптимально подходит для машин с постоянным крутящим моментом. Этим режимом поддерживается много разных вариаций:
- симплексная работа,
- дуплексная работа,
- шунтирование устройства в конце пуска,
- запуск и замедление каскадных двигателей.
Пусковые режимы с преобразователем частоты
Современная эффективная пусковая система, применимая для использования, когда необходимо контролировать и настраивать в широком диапазоне скорость вращения вала мотора. Поддерживаются условия:
- пуск с высокими инерционными нагрузками;
- пуск с высокой нагрузкой, распределением мощности и с низкой ёмкостью короткого замыкания;
- оптимизация потребления электроэнергии;
- адаптация к скоростям вращения агрегатов.
Этот режим пуска асинхронных электродвигателей допустимо использовать на всех типах электрических машин. Однако подобные решения в основном используются для регулировки скорости вала электродвигателя, начиная с пусков второстепенного назначения.
Техника плавного старта мотора
Как плавно запускать асинхронный мотор? Методика и возможные способы показаны на видеоролике. Смотрите ниже познавательный видео-материал, который должен стать полезным уроком потенциального электрика.
При помощи материалов: Schneider-electric
zetsila.ru
Способы пуска асинхронного двигателя — прямой пуск ~ Электропривод
При применении асинхронных короткозамкнутых электродвигателей, очень остро встает вопрос ограничения пусковых токов. Для ограничения пусковых токов применяются различные схемы пуска асинхронного двигателя.
Пусковой ток
При подаче на электродвигатель напряжения, в цепи статора двигателя возникают скачки тока, именуемые пусковым током или током заторможенного ротора. Пусковой ток при пуске трехфазного асинхронного двигателя может превышать в 5 – 7 раз выше номинального, хотя действует кратковременно. После окончания пуска двигателя, и выхода двигателя на номинальные обороты, ток падает до номинального, как показано на рис.
В каждом отдельном случае необходимо принимать меры, для снижения пусковых токов, используя различные способы пуска. Кроме этого необходимо принять специальные меры для стабилизации питающего напряжения.
Пусковые периоды
Рассматривая различные способы пуска трехфазного асинхронного двигателя, которые снизить пусковой ток, нужно следить за тем, чтобы период пуска не был слишком долгим. Потому что продолжительное время пуска двигателя может вызвать перегрев обмоток.
Способы пуска трехфазного асинхронного двигателя
Следует знать основные достоинства и недостатки различных способов пуска трехфазного асинхронного двигателя. В данной таблице представлены сравнительные характеристики часто используемых способов пуска.
Прямой пуск
Что такое прямой пуск? Как следует из названия, прямой пуск трехфазного асинхронного двигателя означает, что электродвигатель подключается к сети на номинальное напряжение. Прямой пуск в англоязычной аббревиатуре обозначается как (direct-on-line starting – DOL). Его обычно применяют при стабильном питании двигателя, если вал двигателя жестко привязан к приводу, например привод вентилятора или насоса.
Преимущества
Прямой пуск трехфазного асинхронного двигателя от сети (DOL), на сегодняшний день является самым дешёвым и простым. Поэтому он получил и самое большое распространение в промышленности. Кроме того, он даёт минимальное увеличение температуры электродвигателя при пуске по сравнению со всеми другими способами пуска. Если величина пускового тока не ограничивается специальными нормами, то такой способ является наиболее предпочтительным, но не самым экономичным. Если величина пускового тока ограничена параметрами сети, то необходимо выбирать другие способы пуска. Простейшая схема управления трехфазным асинхронным двигателем M включает в себя силовой контактор KM, устройство зашиты от перегрузок QF тепловое реле KT и кнопки управления SB1, SB2.
Недостатки
В схемах прямого пуска асинхронных двигателей пусковой момент составляет 150% -300% номинального, при этом пусковой ток может достигать 300% — 800% тока номинального.
eprivod.com
§ 15.2. Пуск двигателей с короткозамкнутым ротором
Пуск непосредственным включением в сеть (рис. 15.3). Этот способ пуска, отличаясь простотой, имеет существенный недостаток: в момент подключения двигателя к сети в обмотке статора возникает большой пусковой ток, в 5—7 раз превышающий номинальный ток двигателя. При небольшой инерционности исполнительного механизма частота вращения двигателя быстро достигает установившегося значения и пусковой ток также быстро спадает, не вызывая перегрева обмотки статора. Но такой значительный бросок тока в питающей сети может вызвать в ней заметное падение напряжения. Однако этот способ пуска благодаря своей простоте получил наибольшее применение для двигателей
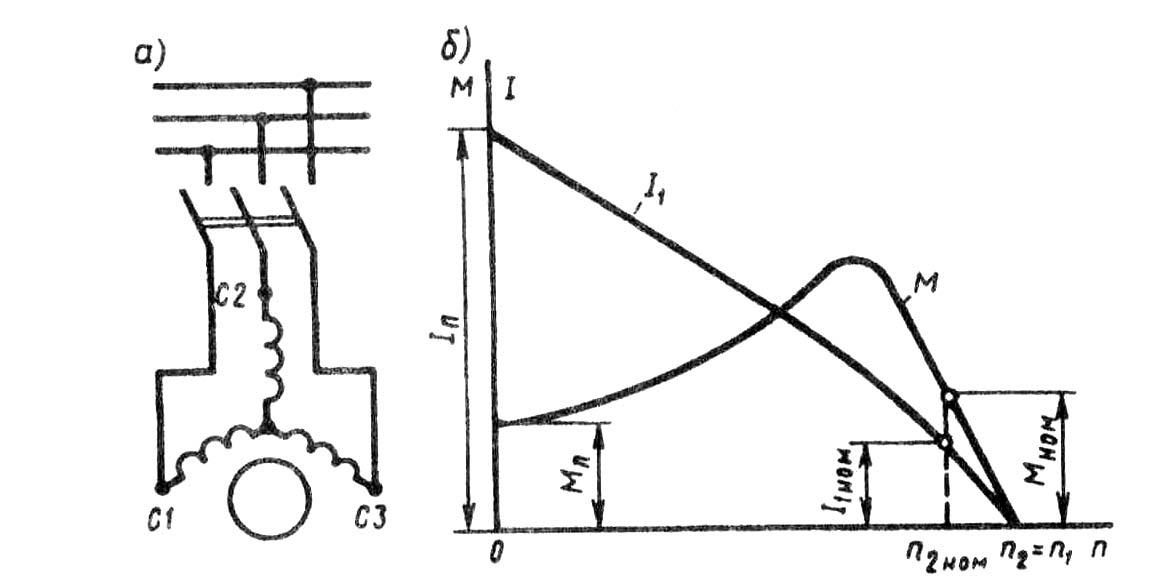
Рис. 15.3. Схема непосредственного включения в сеть (а) и графики изменения тока и момента при пуске (б) асинхронного двигателя с короткозамкнутым ротором
мощностью до 38—50 кВт и более (при достаточном сечении жил токоподводящего кабеля). При необходимости уменьшения пускового тока двигателя применяют какой-либо из способов пуска короткозамкнутых двигателей при пониженном напряжении.
Пуск при пониженном напряжении. В соответствии с (15.1) пусковой ток двигателя пропорционален подведенному напряжению U1, уменьшение которого вызывает соответствующее уменьшение пускового тока. Существует несколько способов понижения подводимого к двигателю напряжения. Рассмотрим некоторые из них.
Для
асинхронных двигателей, работающих при
соединении обмоток статора треугольником,
можно применить пуск переключением
обмотки статора со звезды на треугольник
(рис. 15.4, а). В момент подключения двигателя
к сети переключатель ставят в положение
«звезда», при котором обмотка статора
оказывается соединенной в звезду. При
этом фазное напряжение на статоре
понижается
в  раз. Во столько же раз уменьшается и ток
в фазных обмотках двигателя (рис.
15.4, б). Кроме того, при соединении обмоток
звездой линейный ток равен фазному, в
то время как при соединении этих же
обмоток треугольником линейный ток
больше
фазного
в
раз. Во столько же раз уменьшается и ток
в фазных обмотках двигателя (рис.
15.4, б). Кроме того, при соединении обмоток
звездой линейный ток равен фазному, в
то время как при соединении этих же
обмоток треугольником линейный ток
больше
фазного
в  раз. Следовательно, переключив обмотки
статора звездой, мы добиваемся уменьшения
линейного тока в (
раз. Следовательно, переключив обмотки
статора звездой, мы добиваемся уменьшения
линейного тока в ( )2 = 3 раза.
)2 = 3 раза.
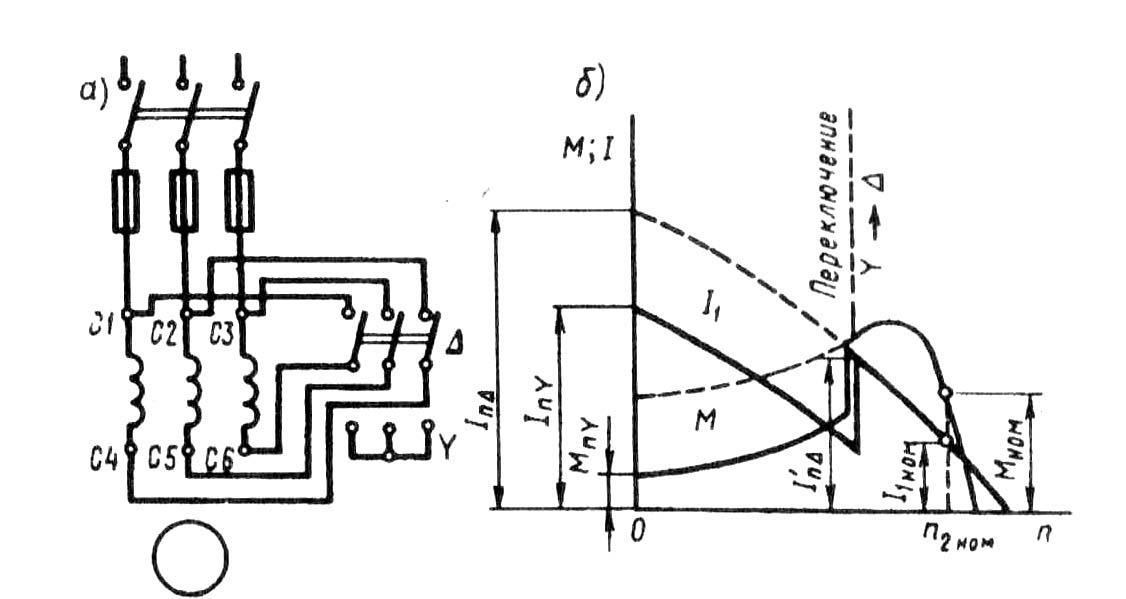
Рис. 15.4. Схема включения (а) и графики изменения момента и тока (фазного) при пуске (б) асинхронного двигателя с короткозамкнутым ротором переключением обмотки статора со звезды на треугольник
После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, переключатель быстро переводят в положение «треугольник» и фазные обмотки двигателя оказываются под номинальным напряжением. Возникший при этом бросок тока до значения I/пΔ является незначительным.
Рассмотренный
способ пуска имеет существенный
недостаток —
уменьшение
фазного напряжения в  раз сопровождается уменьшением пускового
момента в три раза, так как, согласно
(13.19), пусковой момент асинхронного
двигателя прямо пропорционален
квадрату напряженияU1.
Такое значительное уменьшение
пускового момента не позволяет применять
этот способ пуска для двигателей,
включаемых в сеть при значительной
нагрузке на валу.
раз сопровождается уменьшением пускового
момента в три раза, так как, согласно
(13.19), пусковой момент асинхронного
двигателя прямо пропорционален
квадрату напряженияU1.
Такое значительное уменьшение
пускового момента не позволяет применять
этот способ пуска для двигателей,
включаемых в сеть при значительной
нагрузке на валу.
Описанный
способ понижения напряжения при пуске
применим лишь для двигателей,
работающих при соединении обмотки
статора треугольником. Более универсальным
является способ с понижением подводимого
к двигателю напряжения посредством
реакторов (реактивных катушек —
дросселей). Порядок включения
двигателя в этом случае следующий (рис.
15.5, а). При разомкнутом рубильнике 2
включают рубильник 7. При этом ток из
сети поступает в обмотку статора через
реакторы Р, на которых происходит падение
напряжения j хр (где хр — индуктивное сопротивление реактора,
Ом). В результате на обмотку статора
подается пониженное напряжение
хр (где хр — индуктивное сопротивление реактора,
Ом). В результате на обмотку статора
подается пониженное напряжение
После разгона ротора двигателя включают рубильник 2 и подводимое к обмотке статора напряжение оказывается номинальным.
Недостаток этого способа пуска состоит в том, что уменьшение напряжения в U/1/ U1ном
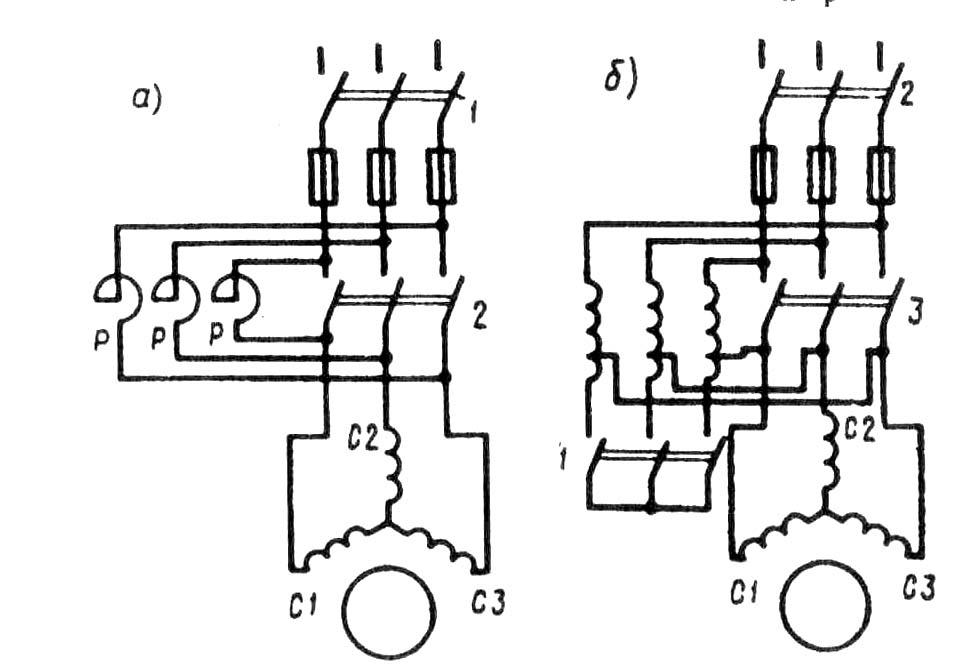
Рис. 15.5. Схемы реакторного (а) и автотрансформаторного (б) способов пуска асинхронных двигателей с короткозамкнутым ротором
раз сопровождается уменьшением пускового момента Мп в (U/1/ U1ном)2 раз.
При пуске двигателя через понижающий автотрансформатор (рис. 15.5, б) вначале замыкают рубильник 1, соединяющий обмотки автотрансформатора звездой, а затем включают рубильник 2 и двигатель оказывается подключенным на пониженное напряжение U/1 . При этом пусковой ток двигателя, измеренный на выходе автотрансформатора, уменьшается в КА раз, где КА — коэффициент трансформации автотрансформатора. Что же касается тока в питающей двигатель сети, т. е. тока на входе автотрансформатора, то он уменьшается в К2А раз по сравнению с пусковым током при непосредственном включении двигателя в сеть. Дело в том, что в понижающем автотрансформаторе первичный ток меньше вторичного в КА раз и поэтому уменьшение пускового тока при автотрансформаторном пуске составляет КАКА = К2А раз. Например, если кратность пускового тока асинхронного двигателя при непосредственном его включении в сеть составляет Iп/I1ном = 6 , а напряжение сети 380 В, то при автотрансформаторном пуске с понижением напряжения до 220 В кратность пускового тока в сети I/п/I1ном = 6/ (380/220)2 = 2 .
После первоначального разгона ротора двигателя рубильник 1 размыкают и автотрансформатор превращается в реактор. При этом напряжение на выводах обмотки статора несколько повышается, но все же остается меньше номинального. Включением рубильника 3 на двигатель подается полное напряжение сети. Таким образом, автотрансформаторный пуск проходит тремя ступенями: на первой ступени к двигателю подводится напряжение U1= (0,50÷0,60)U1ном, на второй —U1= (0,70÷0,80)U1номи, наконец, на третьей ступени к двигателю подводится номинальное напряжениеU1ном.
Как и предыдущие способы пуска при пониженном напряжении, автотрансформаторный способ пуска сопровождается уменьшением пускового момента, так как значение последнего прямо пропорционально квадрату напряжения. С точки зрения уменьшения пускового тока автотрансформаторный способ пуска лучше реакторного, так как при реакторном пуске пусковой ток в питающей сети уменьшается в U/1/ U1ном раз, а при автотрансформаторном — в (U/1/ U1ном)2 раз. Но некоторая сложность пусковой операции и повышенная стоимость пусковой аппаратуры (понижающий автотрансформатор и переключающая аппаратура) несколько ограничивают применение этого способа пуска асинхронных двигателей.
studfile.net
45. Схемы пуска асинхронного двигателя с короткозамкнутым ротором.
Наиболее простым способом пуска двигателя с короткозамкнутым ротором является включение обмотки его статора непосредственно в сеть, на номинальное напряжение обмотки статора (рис. 28-1, а). Такой пуск называется прямым.
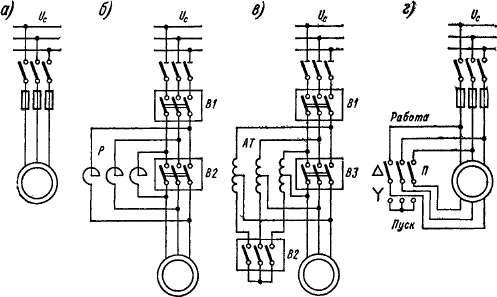
Рис. 28-1. Схемы способов пуска двигателей с короткозамкнутым ротором: а — прямой; б — реакторный; в — автотрансформаторный; г — с переключением со звезды на треугольник
46.Пуск двигателя с фазным ротором.
Одной из разновидностей асинхронного двигателя является двигатель с фазным ротором. На практике данный двигатель довольно часто применяется, благодаря улучшенным пусковым свойствам и характеристикам.
Устройство асинхронного двигателя с фазным ротором
Как и у АД с короткозамкнутым ротором, сердечник его статора набирается из листов электротехнической стали, а затем спрессовывается. В пазы сердечника укладываются фазные обмотки, концы которых затем выводятся в коробку, расположенную на корпусе двигателя.
Отличие заключается в роторе двигателя. Он также, как и статор набирается из листов стали, спрессовывается и в него набирается фазная обмотка. Причем число фаз ротора равно числу фаз статора, в то время как у короткозамкнутого, каждый стержень “беличьей клетки” образует отдельную фазу. Отсюда название – фазный ротор.
Концы фаз фазного ротора соединяются с контактными кольцами, которые расположены на валу ротора. В свою очередь, контактные кольца соприкасаются с графитовыми щетками, которые имеют выводы в коробку на корпусе, для возможности подключения дополнительного сопротивления. Это сопротивление в цепи ротора оказывает влияние на токи, протекающие в нем, а как следствие на его характеристики. При увеличении сопротивления цепи ротора, механическая характеристика становится более мягкой.
Влияние сопротивления сказывается и на пуске двигателя, а именно добавочное сопротивление позволяет осуществить более мягкий пуск, снизить пусковые токи и моменты и как следствие, снизить удары в механической части привода в момент пуска.
Как правило, используют переменное сопротивление, которое уменьшают с увеличением оборотов двигателя. Так как зачастую оно представляет из себя ступенчатый реостат, то и пуск двигателя осуществляется тоже ступенчато.
Для увеличения КПД двигателя и сохранения целостности щеток в конструкции двигателя предусматривается специальное щеткоснимательное устройство, которое убирает щетки после пуска. КПД повышается за счет того, что на щетках падает часть напряжения.
Таким образом, преимуществом асинхронного двигателя с фазным ротором является возможность пуска под нагрузкой, но недостатком является более сложная конструкция, а также его дороговизна по сравнению с двигателем с короткозамкнутым ротором. Короткозамкнутый кроме того, является более простым и надежным, не требует дополнительных устройств.
47. Регулирование скорости вращения асинхронного двигателя с фазным ротором.
Частота вращения ротора равна
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов

Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потерив цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому,механическая характеристикадвигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания
Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания
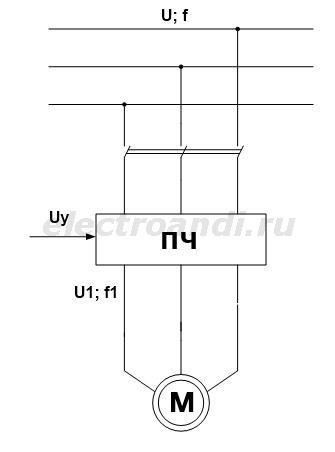
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда — звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
studfile.net