
5 шагов подключения неизвестного электродвигателя
Иногда возникает такая проблема — необходимо подключить электродвигатель в стандартную сеть 380В 50 Гц, но характеристики двигателя неизвестны, поскольку документации к нему нет, а шильдик отсутствует.
Существуют 5 простых шагов, последовательно выполнив которые, можно обеспечить двигатель нужным напряжением питания, защитой и схемой включения.
1. Оцениваем номинальную мощность и ток двигателя
Прежде всего нужно ориентировочно определить мощность электродвигателя. Для этого находим похожий двигатель с известными параметрами, воспользовавшись каталогами производителей. Агрегаты должны совпадать по габаритам и диаметру вала.
На данном этапе мы сможем определить основные параметры для подключения и использования привода – мощность, ток, частоту вращения вала.
2. Определяем напряжение по схеме включения
Следующий шаг — определяем, по какой схеме подключить обмотки и какое напряжение подать. Есть несколько критериев, позволяющих с некоторой вероятностью оценить эти параметры.
Напомним, что промышленные низковольтные двигатели выпускаются с двумя видами напряжений питания: 220/380 В и 380/660 В для схем подключения «Треугольник» и «Звезда», соответственно. На двигатели первого вида можно подавать 380 В, собрав обмотки в схему «Звезда», на приводы второго вида – в «Треугольник».
Если электродвигатель новый, то, скорее всего, он собран по схеме, требующей питания 380 В. Именно такую схему обычно используют производители.
Если из двигателя выходит 3 провода, можно сделать вывод, что он имеет стандартное питание 380 В. При этом неважно, по какой схеме агрегат собран внутри. Однако, если в коробке присутствует конденсатор, можно утверждать, что двигатель рассчитан на напряжение 220 В и собран в «Треугольник». Кроме того, мощность в таком случае будет невысокой – не более 2,2 кВт.
Если асинхронный двигатель имеет шесть никак не подключенных выводов, определить напряжение питания по схеме включения не получится. В этом случае нужно сначала найти выводы обмоток, затем начало и конец каждой обмотки, чтобы собрать их в одну из схем. Обычно названия обмоток и их начало/конец обозначены.
Электродвигатели мощностью более 5 кВт, как правило, не включают напрямую. Для этого используют преобразователь частоты, устройство плавного пуска, либо схему «Звезда»/«Треугольник».
3. Подаем питание на двигатель
После того, как проведена оценка мощности и выбрана схема включения, можно подавать питание. Первоначально двигатель должен работать в холостом режиме. Питание подается через мотор-автомат и автоматический выключатель. Для включения желательно использовать контактор.
Ориентировочный рабочий ток асинхронного двигателя можно посчитать по эмпирической формуле: I (А) = 2 х P (кВт). То есть, если определено, что мощность двигателя составляет 3 кВт, его номинальный ток будет около 6 А в любой из схем включения.
Номинал мотор-автомата выбирается исходя из определенной ранее мощности. Для холостого хода уставку автомата можно установить в 2 раза меньше номинала, в нашем примере – около 3А. Если автомат выбивает, его уставку увеличивают вплоть до номинала (6 А).
На данном этапе необходимо следить за исправностью двигателя и его температурой, контролировать ток холостого хода токоизмерительными клещами. В холостом режиме двигатель не должен греться при нормальной работе крыльчатки вентилятора. Если нагрев происходит, это может означать, что агрегат неисправен либо нужно изменить схему его включения.
4. Определяем необходимой ток защиты
Номинальный ток и номинальная мощность электродвигателя ограничены его нагревом.
Для определения тока защиты включаем двигатель с номинальной нагрузкой на валу через мотор-автомат с током уставки, определенном на предыдущем шаге. После подачи питания автомат должен отработать по перегрузке. Далее увеличиваем его уставку, при необходимости подключаем автомат с другим диапазоном уставки.
5. Контролируем нагрев обмоток
При работе любого двигателя необходимо периодически контролировать его температуру. В данном случае это особенно важно. Как показывает опыт, болевой порог человеческой руки равен 60°С. Такой способ контроля температуры – самый простой, однако лучшим способом будет использование встроенного термочувствительного элемента.
Заключение
Любой двигатель с неизвестными характеристиками имеет свою историю. Поэтому, прежде чем следовать советам, изложенным в статье, нужно обследовать оборудование либо расспросить персонал о том, где ранее был установлен привод.
Другие полезные материалы:
Трехфазный двигатель в однофазной сети
Эксплуатация электрооборудования вне помещений
Как прозвонить электродвигатель мультиметром
Как рассчитать потребляемую мощность двигателя
Подключение однофазного электрического двигателя
Однофазный асинхронный двигатель с замкнутым ротором состоит из ротора — вращающейся части с неподвижно закрепленном на нем замкнутым контуром и статора — корпуса с неподвижно закрепленными на нем двумя обмотками. Существует несколько способов подключения : без конденсатора, с одним или двумя конденсаторами, с постоянно работающими двумя обмотками или с одной из обмоток работающей только при старте.
Найти обмотки
Из клеммной коробки двигателя торчит 3 или 4 конца провода. Если выводов 3, то значит два вывода соединены внутри, что немного усложнит нам задачу. В любом случае нам потребуется мультиметр.
Четыре провода
Ставим мультиметр на «прозвон» и находим концы обмоток, они звонятся попарно. Замеряем сопротивление каждой обмотки. Та, у которой сопротивление меньше — рабочая, та, у которой сопротивление больше — разгонная.
Три провода
Замеряем сопротивление между тремя выводами. Наименьшее значение — рабочая обмотка, среднее значение — разгонная.
Подключение
Подключение без конденсатора
Если сопротивление отличается в разы, то разгонная обмотка должна работать кратковременно, только при пуске двигателя. В таком случае конденсатор не нужен. Достаточно коммутирующего устройства, которое бы обеспечивало подачу напряжения на разгонную обмотку в момент запуска двигателя. В простейшем случае это кнопка без фиксации.
Подключение через конденсатор
Если сопротивление рабочей и разгонной обмоток примерно одинаковое, то при работе двигателя должны быть подключены обе обмотки, одна из которых подключена через конденсатор.
Параметры конденсатора зависят от мощности двигателя, нужен неполярный конденсатор, расчитанный на напряжение 450 Вольт, с емкостью 80 мкФ на каждый киловатт мощности двигателя.
К выводам рабочей обмотки подключаем ноль и фазу, к разгонной обмотке подключаем конденсатор, а потом ноль и фазу. Если требуется изменить направление вращения двигателя, необходимо поменять местами ноль и фазу на разгонной обмотке. В случае, если постоянно менять направление вращения, в схеме нужно предусмотреть коммутационный блок, который бы менял местами ноль и фазу на выводах разгонной обмотки.
Мастеровым от мастерового.
 : Определение типа асинхронного двигателя
: Определение типа асинхронного двигателя
Прежде чем подключить асинхронный двигатель к сети, необходимо определить, какой тип двигателя находится перед нами. Так как каждый из них требует разного подключения.
Среди распространенных двигателей можно выделить три основные группы. Это трёхфазные – они наиболее распространены. Затем идут однофазные, с конденсаторной обмоткой, или просто конденсаторные. И наименее распространены – однофазные с пусковой обмоткой, или как их ещё называют – с бифилярной обмоткой. Касаться двухскоростных и других редких модификаций я в данной статье не буду.
Так как шильдики на двигателях могут быть повреждены, или вовсе отсутствовать. А иногда двигатель может быть перемотан с пересчётом на другой тип, то ориентироваться на табличку можно только при условии, что двигатель новый. В других случаях, лучше определить тип двигателя самостоятельно.
Для того, чтоб определить тип двигателя, нам понадобится омметр способный замерять от единиц сопротивления и выше.
Открываем борно двигателя и убираем все перемычки между проводами, а также, разъединяем все соединения.
Замеряя сопротивление между проводами, находим «прозванивающиеся» пары и записываем сопротивление между ними.
Трёхфазный двигатель имеет три одинаковых обмотки. Поэтому он будет иметь три пары проводов с одинаковым сопротивлением или три провода, сопротивление между которыми будет одинаково в любой последовательности. Различия между этими вариантами в том, что двигатель с тремя выводами уже соединён звездой и мы не сможем соединить его треугольником без разборки и выведения дополнительных проводов. Если же в двигателе шесть выводов, то мы сможем применить любую схему подключения.
Однофазные двигатели обычно имеют две разные обмотки (в
редких случаях две обмотки одинаковы). Поэтому будут иметь две пары проводов с разным сопротивлением.
Либо три провода с разным сопротивлением между ними. Причём, два меньших
сопротивления в сумме будут равны большему. Разница между двигателями с тремя и
четырьмя проводами в том, что двигатель с тремя проводами мы сможем «запустить»
только в одну сторону, а с четырьмя, и по часовой стрелке, и против.
Поэтому будут иметь две пары проводов с разным сопротивлением.
Либо три провода с разным сопротивлением между ними. Причём, два меньших
сопротивления в сумме будут равны большему. Разница между двигателями с тремя и
четырьмя проводами в том, что двигатель с тремя проводами мы сможем «запустить»
только в одну сторону, а с четырьмя, и по часовой стрелке, и против.
Если сопротивление обмоток отличается не больше чем в 2 раза, то это двигатель, скорее всего, конденсаторный. Если больше чем в 2 раза, то с пусковой обмоткой. Более точно можно определить опытным путём.
P.S. При «прозвонке» проводов, нужно учитывать, что из двигателя могут выходить дополнительные провода от термодатчиков, «корпус» двигателя, центробежные выключатели и др.
Николай Москаленко Сделал дополнение к статье, за что ему большое спасибо.
По принципам устройства однофазные асинхронные двигатели разделяются на следующие основные типы:
1) двигатели с пусковой обмоткой
2) двигатели с встроенным сопротивлением (бифилярная обмотка)
3) конденсаторные двигатели
4) двигатели с короткозамкнутым витком на полюсе
Яркий представитель первого типа находится справа (АД-180). Пусковая обмотка занимает 1/3 пазов статора, имеет малое кол-во витков и, следовательно, малое индуктивное сопротивление.
К второму типу относятся двигатели АОЛБ -32-2, с бифилярной обмоткой (например, мотается катушка из 75 витков из которых 25 разворачиваются на 180 градусов) — охватывает диапазон от 18 до 600 Вт.
К третьему типу двигателе надо отнести двигатели АОЛГ и АОЛД — конденсаторные и с пусковым конденсатором. они были заменены новой серией АВ (трехфазный) или АВЕ (однофазный, второй справа).
Схема подключения шагового двигателя 4 провода
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор – это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Униполярные и биполярные шаговые двигатели
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса – положительный и отрицательный.
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Подключение шаговых двигателей
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями – полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
Полный шаг – такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей).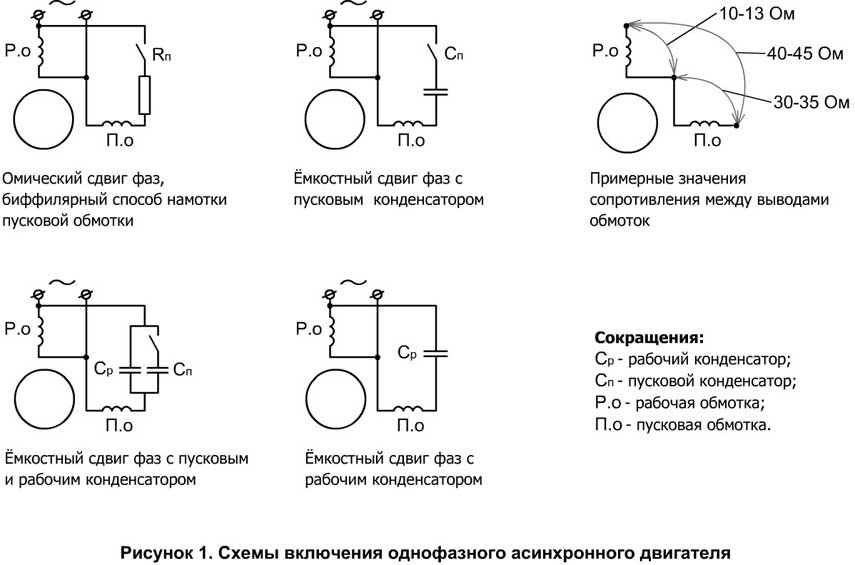 Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг – поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
В статье подробно рассказано о нескольких способах обновления BIOS на материнской плате Asus.
Теперь вы точно подберете идеальный ноутбук для работы или учебы!
Данная статья описывает преимущества SSD накопителей для приложений и игр. Также здесь выполняется сравнение между достоинств данного накопителя с устаревшим аналогом.
В статье речь идет о том, как отремонтировать пластмассовый китайский электрочайник.
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре.
 Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
 Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим – ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим – ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим – ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.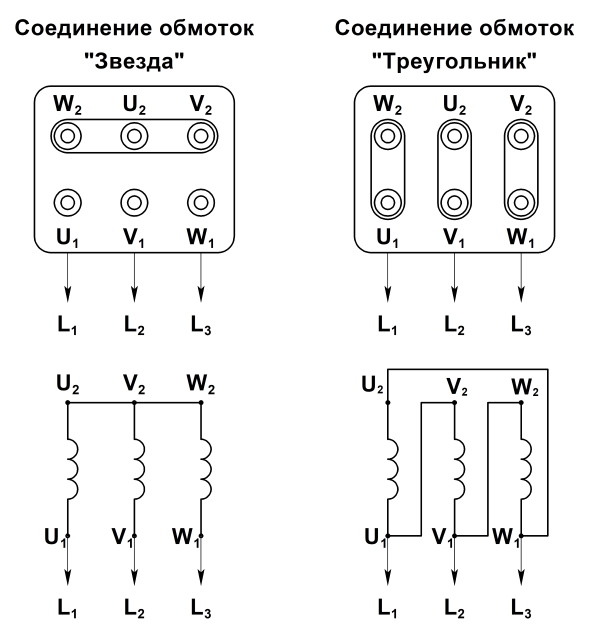
Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Если подавать уровни не «0» – «½» – «1» (как на картинке), а «0» – «¼» – «½» – «¾» – «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления – доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.
Пример работы шаговых двигателей с разными видами роторов:
Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
 Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Соответственно, с их помощью можно повернуть вал и на определённое число оборотов, потому что N оборотов — это тоже определённый угол, равный 360*N, и, в том числе, на нецелое число оборотов, например на 0.75 оборота, 2.5 оборота, на 3.7 оборота и т.д. Этими возможностями шаговых двигателей определяется и область их применения. В основном они используются для позиционирования различных устройств: считывающих головок в дисководах, печатающих головок в принтерах и плоттерах и т.д.
Естественно такие возможности не могли обойти стороной и радиолюбители. Они с успехом используют шаговики в конструкциях самодельных роботов, самодельных станков с ЧПУ и т.д. Ниже описаны результаты моих опытов с шаговым двигателем, надеюсь, что кому-то это может оказаться полезным.
Итак, что нам понадобится для экспериментов. Во-первых, шаговый двигатель. Я брал 5-ти вольтовый китайский биполярный шаговик с загадочным названием, выдранный из старого 3,5″ дисковода, аналог M20SP-GW15. Во-вторых, поскольку обмотки двигателя потребляют значительный ток (в данном случае до 300 мА), то вполне понятно, что подключить шаговик к контроллеру напрямую не удастся, нужен драйвер.
В качестве драйвера для биполярных шаговых двигателей обычно используют схему так называемого H-моста или специальную микросхему (в которой всё равно встроен H-мост). Можно конечно ваять самому, но я взял готовую микруху (LB1838) из того же старого дисковода. Собственно, кроме всего вышеописанного, для наших экспериментов также понадобятся: PIC-контроллер (был взят PIC12F629, как самый дешёвый) и пара кнопок.
Собственно, кроме всего вышеописанного, для наших экспериментов также понадобятся: PIC-контроллер (был взят PIC12F629, как самый дешёвый) и пара кнопок.
Перед тем, как перейти непосредственно к схеме, давайте немного разберёмся с теорией.
Биполярный шаговый двигатель имеет две обмотки и, соответственно, подключается по четырём проводам. Найти концы обмоток можно простой прозвонкой — концы проводов, относящиеся к одной обмотке, будут между собой звониться, а концы, относящиеся к разным обмоткам, — нет. Концы первой обмотки обозначим буквами «a», «b», а концы второй обмотки буквами «c», «d».
На рассматриваемом экземпляре есть цифровая маркировка контактов возле мотора и цветовая маркировка проводов (бог его знает, может это тоже какой-то стандарт): 1 — красный, 2 — голубой — первая обмотка; 3 — жёлтый, 4 — белый — вторая обмотка.
Для того, чтобы биполярный шаговый двигатель вращался, необходимо запитывать обмотки в порядке, указанном в таблице. Если направление обхода таблицы выбрать сверху вниз по кругу, то двигатель будет вращаться вперёд, если снизу вверх по кругу — двигатель будет вращаться назад:
За один полный цикл двигатель делает четыре шага.
Для правильной работы, должна строго соблюдаться указанная в таблице последовательность коммутаций. То есть, например, после второй комбинации (когда мы подали + на вывод «c» и минус на вывод «d») мы можем подать либо третью комбинацию (отключить вторую обмотку, а на первой подать — на «a» и + на «b»), тогда двигатель повернётся на один шаг вперёд, либо первую комбинацию (двигатель повернётся на один шаг назад).
То, с какой комбинации нужно начинать вращение, определяется тем, какая последняя комбинация подавалась на двигатель перед его выключением (если конечно его руками потом не крутили) и желаемым направлением вращения.
То есть, допустим мы повернули двигатель на 5 шагов вперёд, подавая на него комбинации 2-3-4-1-2, потом обесточили, а потом захотели повернуть ещё на один шаг вперёд. Для этого на обмотки надо подать комбинацию 3. Пусть после этого мы его опять обесточили, а через какое-то время захотели вернуть его на 2 шага назад, тогда нам нужно подать на двигатель комбинации 2-1. И так далее в таком же духе.
Эта таблица, кроме всего прочего, позволяет оценить, что будет происходить с шаговым двигателем, если мы перепутаем порядок подключения обмоток или концы в обмотках.
На этом мы закончим с двигателем и перейдём к драйверу LB1838.
У этой микрухи есть четыре управляющие ноги (IN1, IN2, EN1, EN2), на которые мы как раз и будем подавать сигналы с контроллера, и четыре выходных ноги (Out1, Out2, Out3, Out4), к которым подключаются обмотки двигателя. Обмотки подключаются следующим образом: провод «a» подключается к Out1, провод «b» — к Out2, провод «c» — к Out3, провод «d» — к Out4.
Ниже представлена таблица истинности для микросхемы драйвера (состояние выходов в зависимости от состояния входов):
| IN1 | EN1 | Out1 (a) | Out2(b) | IN2 | EN2 | Out3(c) | Out4(d) |
| Low | High | + | — | Low | High | + | — |
| High | High | — | + | High | High | — | + |
| X | Low | откл | откл | X | Low | откл | откл |
Теперь давайте нарисуем на диаграмме, какую форму должны иметь сигналы IN1, EN1, IN2, EN2 для одного полного цикла вращения (4 шага), т.е. чтобы на выходах появились последовательно все 4 комбинации подключения обмоток:
Если присмотреться к этой диаграмме (слева), то становится очевидно, что сигналы IN1 и IN2 можно сделать абсолютно одинаковыми, то есть на обе этих ноги можно подавать один и тот же сигнал. В этом случае наша диаграмма будет выглядеть так:
Итак, на последней диаграмме нарисовано, какие комбинации уровней сигналов должны быть на управляющих входах драйвера (EN1, EN2, IN1, IN2) для того, чтобы получить соответствующие комбинации подключения обмоток двигателя, а также стрелками указан порядок смены этих комбинаций для обеспечения вращения в нужную сторону.
Вот в общем-то и вся теория. Необходимые комбинации уровней на управляющих входах формируются контроллером (мы будем использовать PIC12F629).
R1..R2 = 1 кОм. Когда соответствующая кнопка не нажата — резистор подтягивает напряжение на входе контроллера к +5 В (высокий уровень). При нажатии на кнопку напряжение на входе подтягивается к земле (низкий уровень).
С1, С2 = 0,1 мкФ — керамические конденсаторы.
С3 = 470 мкФ х 16В — электролитический конденсатор.
Программа управления реализует следующий алгоритм: при нажатии кнопки КН1 двигатель поворачивается на один шаг в одну сторону, а при нажатии кнопки КН2 — на один шаг в другую сторону.
Собственно говоря, можно прикрутить сюда программный UART и реализовать управление от компьютера (передавать с компа скорость, количество шагов и направление вращения).
Как осуществить однофазное подключение трехфазного двигателя к электрической сети
Как осуществить однофазное подключение трехфазного двигателя к электрической сети
Трёхфазный двигатель — электродвигатель, конструктивно предназначенный для питания от трехфазной сети переменного тока.
Асинхронные электродвигатели широко применяются в промышленности благодаря относительной простоте конструкции, хорошим рабочим характеристикам, удобству управления.
Подобные устройства часто попадают в руки домашнего мастера и он, пользуясь знанием основ электротехники, подключает такой электродвигатель для работы от однофазной сети 220 вольт. Чаще всего его используют для наждака, обработки древесины, измельчения зерен и выполнения других простых работ.
Даже на отдельных промышленных станках и механизмах с приводами встречаются образцы различных двигателей, способных работать от одной или трех фаз.
Чаще всего у них используется конденсаторный запуск, как наиболее простой и приемлемый, хотя это не единственный способ, известный большинству грамотных электриков.
Принцип работы трехфазного двигателя
Промышленные асинхронные электрические устройства систем 0,4 кВ выпускаются с тремя обмотками статора. К ним прикладываются напряжения, сдвинутые по углу на 120 градусов и вызывающие токи аналогичной формы.
Для запуска электродвигателя токи направляют таким образом, чтобы они создали суммарное вращающееся электромагнитное поле, оптимально воздействующее на ротор.
Конструкция статора, используемая для этих целей, представлена:
1. корпусом;
2. магнитопроводом сердечника с уложенными в него тремя обмотками;
3. клеммными выводами.
В обычном исполнении изолированные провода обмоток собраны по схеме звезды за счет установки перемычек между винтами клемм. Кроме этого способа еще существует подключение, называемое треугольником.
В обоих случаях обмоткам назначено направление: начало и конец, связанное со способом монтажа — навивки при изготовлении.
Обмотки нумеруются арабскими цифрами 1, 2, 3. Их концы обозначаются К1, К2, К3, а начала — Н1, Н2, Н3. У отдельных типов двигателей подобный способ маркировки может быть изменен, например, С1, С2, С3 и С4, С5, С6 или другими символами либо вообще не применяться.
Правильно нанесенная маркировка упрощает подключение проводов питания. При создании на обмотках симметричной схемы расположения напряжений, обеспечивается создание номинальных токов, осуществляющих оптимальную работу электродвигателя. В этом случае их форма в обмотках полностью соответствует подводимому напряжению, повторяет его без каких-либо искажений.
Естественно, следует понимать, что это чисто теоретическое заявление, ибо на практике токи преодолевают различные сопротивления, незначительно отклоняются.
Наглядному восприятию происходящих процессов помогает изображение векторных величин на комплексной плоскости. Для трехфазного двигателя токи в обмотках, создаваемые приложенным симметричным напряжением, изображаются следующим образом.
При питании электродвигателя системой напряжений с тремя равномерно разнесенными по углу и одинаковыми по величине векторами в обмотках протекают такие же симметричные токи.
Каждый из них образует электромагнитное поле, сила индукции которого наводит в обмотке ротора собственное магнитное поле. В результате сложного взаимодействия трех полей статора с полем ротора создается вращательное движение последнего, обеспечивается создание максимальной механической мощности, вращающей ротор.
Принципы подключения однофазного напряжения к трехфазному двигателю
Для полноценного подключения к трем одинаковым статорным обмоткам, разнесенных по углу на 120 градусов, два вектора напряжения отсутствуют, имеется только один из них.
Можно подать его всего в одну обмотку и заставить ротор вращаться. Но, эффективно использовать такой двигатель не получится. Он будет обладать очень малой выходной мощностью на валу.
Поэтому возникает задача подключения этой фазы таким образом, чтобы она в разных обмотках создавала симметричную систему токов. Другими словами, нужен преобразователь напряжения однофазной сети в трехфазную. Подобная задача решается разными методами.
Если отбросить сложные схемы современных инверторных установок, то можно реализовать следующие распространенные способы:
1. использование конденсаторного запуска;
2. применение дросселей, индуктивных сопротивлений;
3. создание различных направлений токов в обмотках;
4. комбинированный способ с выравниванием сопротивлений фаз для образования одинаковых амплитуд у токов.
Кратко разберем эти принципы.
Отклонение тока при прохождении через емкость
Наиболее широко практикуется конденсаторный запуск, позволяющий отклонять ток в одной из обмоток за счет подключения емкостного сопротивления, когда создается опережение тока от вектора приложенного напряжения на 90 градусов.
В качестве конденсаторов обычно используются металлобумажные конструкции серий МБГО, МБГП, КБГ и подобные.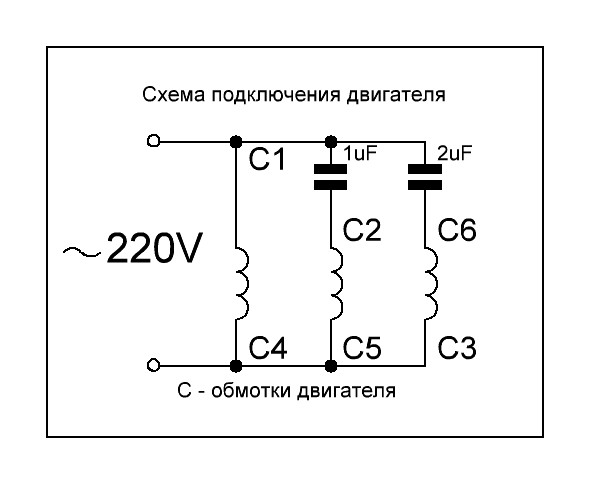 Электролиты не приспособлены для пропускания переменного тока, быстро взрываются, а схемы, предусматривающие их использование, отличаются сложностью, низкой надежностью.
Электролиты не приспособлены для пропускания переменного тока, быстро взрываются, а схемы, предусматривающие их использование, отличаются сложностью, низкой надежностью.
В этой схеме ток отличается по углу от номинальной величины. Он отклоняется всего на 90 градусов, не доходя на 30о (120-90=30).
Отклонение тока при прохождении через индуктивность
Ситуация аналогична предыдущей. Только здесь ток отстает от напряжения на те же 90 градусов, а тридцати недобирает. Кроме того, конструкция дросселя не такая простая, как у конденсатора. Его надо рассчитать, собрать, настроить под индивидуальные условия. Этот способ не получил широкого распространения.
При использовании конденсаторов или дросселей токи в обмотках электродвигателя не доходят до требуемого угла на тридцатиградусный сектор, показанный красным цветом на картинке, что уже создает повышенные потери энергии. Но, с ними приходится мириться.
Они мешают созданию равномерного распределения сил индукции, создают тормозящий эффект. Точно оценить его влияние сложно, но при простом подходе деления углов получается (30/120=1/4) потеря 25%. Однако, можно ли так считать?
Отклонение тока подачей напряжения обратной полярности
В схеме звезды принято фазный провод напряжения подключать на вход обмотки, а нулевой — на ее конец.
Если в две разнесенные на 120о фазы подать одно и то же напряжение, но разделить их, а во второй изменить полярность, то токи сдвинутся по углу относительно друг друга. Они станут формировать электромагнитные поля разного направления, влияющего на вырабатываемую мощность.
Только при этом способе по углу получается отклонение токов на небольшое значение — 30о.
Этим методом пользуются в отдельных случаях.
Способы комплексного применения конденсаторов, индуктивностей, изменения полярности обмоток
Первые три перечисленных метода не позволяют поодиночке создавать оптимально симметричное отклонение токов в обмотках.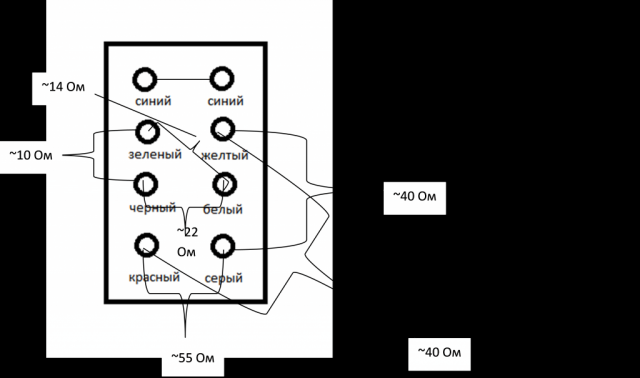 Всегда возникает их перекос по углу относительно стационарной схемы, предусмотренной для трехфазного полноценного питания. За счет этого происходит образование противодействующих моментов, тормозящих раскрутку, снижающих КПД.
Всегда возникает их перекос по углу относительно стационарной схемы, предусмотренной для трехфазного полноценного питания. За счет этого происходит образование противодействующих моментов, тормозящих раскрутку, снижающих КПД.
Поэтому исследователи провели многочисленные эксперименты, основанные на разных сочетаниях этих способов с целью создания преобразователя, обеспечивающего наибольшую эффективность работы трехфазного двигателя. Эти схемы с подробным разбором электротехнических процессов приводятся в специальной учебной литературе. Их изучение повышает уровень теоретических знаний, но в своем большинстве они редко применяются на практике.
Хорошая картина распределения токов создается в схеме, когда:
1. на одну обмотку подается фаза прямого включения;
2. на вторую и третью обмотки напряжение подключают через конденсатор и дроссель, соответственно;
3. внутри схемы преобразователя осуществляется выравнивание амплитуд токов за счет подбора реактивных сопротивлений с компенсацией дисбаланса активными резисторами.
Хочется обратись внимание на третий пункт, которому многие электрики не придают значения. Просто посмотрите на следующую картинку и сделайте вывод о возможности равномерного вращения ротора при симметричном приложении к нему сил одинаковых и разных по величине.
Комплексный метод позволяет создать довольно сложную схему. Она очень редко применяется на практике. Один из вариантов ее реализации для электродвигателя мощностью в 1кВт показан ниже.
Для изготовления преобразователя необходимо создать непростой дроссель. Это требует затрат времени и материальных средств.
Также трудности возникнут при поиске резистора R1, который будет работать с токами, превышающими 3 ампера. Он должен:
- обладать мощностью, превышающей 700 ватт;
- хорошо охлаждаться;
- надежно изолироваться от токоведущих частей.
Существует еще несколько технических сложностей, которые придется преодолеть для создания такого преобразователя трехфазного напряжения. Однако, он довольно универсален, позволяет подключать двигатели с мощностью до 2,5 киловатт, обеспечивает их устойчивую работу.
Однако, он довольно универсален, позволяет подключать двигатели с мощностью до 2,5 киловатт, обеспечивает их устойчивую работу.
Итак, технический вопрос подключения трехфазного асинхронного двигателя в однофазную сеть решен посредством создания сложной схемы преобразователя. Но, он не нашел практического применения по одной простой причине, от которой невозможно избавиться — завышенное потребление электроэнергии самим преобразователем.
Мощность, затрачиваемая на создание схемы трехфазных напряжений подобной конструкцией, превышает минимум в полтора раза потребности самого электродвигателя. При этом суммарные нагрузки, создаваемые на подводящую питание электропроводку, сравнимы с работой старых сварочных аппаратов.
Электрический счетчик, к радости продавцов электроэнергии, очень быстро начинает перечислять деньги из кошелька домашнего мастера на счет энергоснабжающей организации, а это хозяевам совсем не нравится. В итоге сложное техническое решение создания хорошего преобразователя напряжения оказалось ненужным для практического применения в домашнем хозяйстве, да и на промышленных предприятиях тоже.
Допонительно
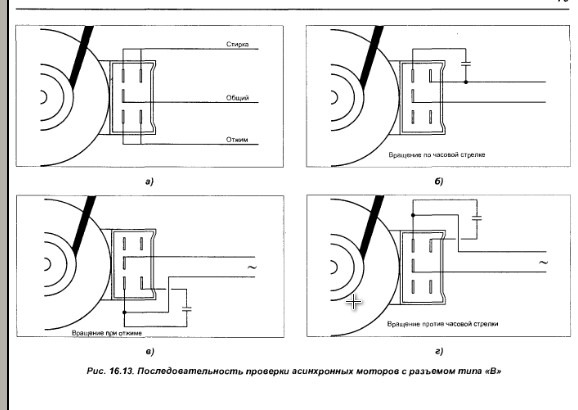
Схемы включения трехфазных асинхронных двигателей для работы от однофазных сетей:
Схемы а — е применяются в том случае, когда фазы обмотки статора жестко соединены в звезду или треугольник и у двигателя имеется только три выводных конца. Наилучшими из этих схем следует считать схемы в и е. При включении двигателя по этим схемам в случае правильного подбора емкости конденсатора он обладает вполне удовлетворительными пусковыми и рабочими свойствами.
Схемы ж и з применяются в случае, когда у двигателя имеется шесть выходных концов — начала и концы всех фаз. При таком соединении обмоток двигатель практически не отличается от обычного однофазного асинхронного двигателя с пусковым сопротивлением или емкостью.
Обмотки двух его фаз, соединенные последовательно, образуют рабочую обмотку, а обмотка третьей фазы — пусковую обмотку. Рабочая обмотка, как и в обычном однофазном двигателе с пусковым сопротивлением или емкостью, занимает 2/3 пазов статора, пусковая обмотка — 1/3 пазов.
При правильном выборе активного сопротивления или емкости этот двигатель может иметь примерно такие же пусковые и рабочие свойства, как и специально рассчитанный однофазный асинхронный двигатель с пусковой обмоткой. (Ю. М. Юферов. Электрические двигатели автоматических устройств)
4 заключительных вывода
1. Технически использовать однофазное подключение трехфазного двигателя можно. Для этого создано много разнообразных схем с различной элементной базой.
2. Практически применять этот способ для длительной работы приводов в промышленных станках и механизмах нецелесообразно из-за больших потерь энергии потребления, создаваемых посторонними процессами, ведущими к низкому КПД системы, повышению материальных затрат.
3. В домашних условиях схему можно использовать для выполнения кратковременных работ на неответственных механизмах. Длительно работать подобные устройства могут, но при этом оплата электроэнергии значительно возрастает, а мощность работающего привода не обеспечивается.
4. Для эффективной эксплуатации асинхронного двигателя лучше использовать полноценную трехфазную сеть питания. Если такой возможности нет, то лучше отказаться от этой затеи и приобрести специальный однофазный электродвигатель соответствующей мощности.
Ранее ЭлектроВести писали, что британская компания Swindon Powertrain предложила вариант преобразования любого топливного автомобиля в электрический, выпустив компактную и готовую к установке силовую установку High Power Density (HPD) мощностью 80 кВт.
По материалам: electrik.info.
Подключение электродвигателя от стиральной машины + схема (мотора)
Если у вас сохранился двигатель от стиральной машины, то вы можете придумать, как его использовать. Например, вы можете сделать из него точильную машинку. Если зафиксировать на нем специальную насадку в виде круглого точильного камня, то вы сможете затачивать ножи, ножницы, топор и другие инструменты.
Если зафиксировать на нем специальную насадку в виде круглого точильного камня, то вы сможете затачивать ножи, ножницы, топор и другие инструменты.
Так же вы можете применить электродвигатель от стиральной машинки и в строительстве. Например, при создании фундамента для будущего дома, вы можете сделать из него «вибратор», который пригодиться при усадке бетонного раствора. Так же его можно применить и в других целях. Двигатель может вращать различные насадки и приводить в движение какие-либо механизмы.
Используя свою фантазию и навыки в подобных делах, вы можете придумать самые разнообразные способы применения электродвигателя. И конечно, при воплощении любого варианта использования данного мотора, вам понадобиться его подключить.
Как подключить электродвигатель современной стиральной машины?
Если вам понадобилось подключить электродвигатель современной стиральной машинки к сети переменного напряжения двести двадцать вольт, то следует учитывать особенности данной детали. Их особенности заключаются в следующем:
- Они не нуждаются в пусковой обмотке.
- Для запуска не понадобиться пусковой конденсатор.
Для запуска нам понадобится нужным образом соединить провода на двигателе. Два белых провода, которые расположены слева, мы использовать не будем. Они необходимы для измерения оборотов электродвигателя. Следующий по очередности – красный провод. Он идет на обмотку статора. За ним находиться коричневый провод. Он так же направлен на одну из обмоток статора. Серый и зеленый провода подключены к щеткам двигателя.
Для того, чтобы представить вам схему подключения более наглядно, мы подготовили следующую схему:
К одному из выводов обмотки мы подключим один провод 220 вольт. На следующую подключим одну из щеток. На оставшуюся щетку двигателя стиральной машины подсоединим второй провод 220 вольт. Так, как это показано на схеме ниже:
После этого, вы можете включить двигатель в сеть 220 и проверить его работоспособность.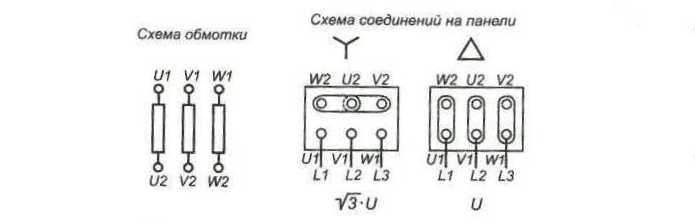 Если вы все сделали правильно, то увидите, как вращается движущаяся часть мотора и услышите шум его работы. Если все прошло нормально, значит двигатель готов к использованию. Кстати, при таком подключении он движется в одну сторону. А что необходимо сделать, чтобы изменить направления вращения? Смотрите схему:
Если вы все сделали правильно, то увидите, как вращается движущаяся часть мотора и услышите шум его работы. Если все прошло нормально, значит двигатель готов к использованию. Кстати, при таком подключении он движется в одну сторону. А что необходимо сделать, чтобы изменить направления вращения? Смотрите схему:
Как вы видите из схематического отображения на рисунке выше, для того, чтобы сменить направление вращения нам понадобилось поменять местами подключения щеток электродвигателя. После переподключения двигателя вновь проверьте его работоспособность, подсоединив его к сети 220 вольт.
Кстати, для того, чтобы облегчить вам работу, мы решили добавить видео инструкцию. В которой описан весь процесс подключения двигателя от стиральной машинки к электричеству.
Способ подключения мотора от современной машинки в этой статье основан именно на том материале, который представлен в данном видео. Поэтому поблагодарим автора этого ролика и посмотрим его очень внимательно:
Как подключить мотор старой машинки?
Правильно подключить электродвигатель машинки не так уж и просто. Но если вы знаете, как это делается, то проблем это не доставит.
Вначале нам необходимо отыскать две пары вывода. Для того, чтобы понять, где они, мы можем воспользоваться мультиметром (тестером). Выберем один из выводов обмотки и подсоединим к нему щуп тестера. Оставшимся щупом мультиметра мы проверим другие выводы, чтобы найти парный.
Таким образом мы отыщем первую пару. Те два вывода, что остались, образуют еще одну пару. Теперь нам нужно понять, где пусковая и рабочая обмотка. Для этого нужно замерить сопротивление. У пусковой сопротивляемость будет больше.
Схема
И так, мы уже нашли рабочую и пусковую обмотку. Теперь мы можем подключить двигатель используя схематичный рисунок, который вы видите рядом. На схеме показано:
На схеме показано:
- ПО – пусковая обмотка. Она нужна для того, чтобы создать начальный крутящий момент в какую-либо сторону.
- ОВ – обмотка возбуждения. Она же называется рабочей обмоткой. Она нужна для создания магнитного поля вращения.
- SB – включатель (кнопка) для недолговременного включения ПО к электросети в двести двадцать вольт.
Если возникнет необходимость поменять сторону, в которую будет направлено вращение мотора, вам понадобиться сменить выводы ПО местами. При такой перемене направление вращения измениться на противоположное.
Когда будете проводить пробное подключение и запуск движка, не забудьте позаботиться о своей безопасности и сохранности окружающих. Обязательно зафиксируйте электродвигатель. Это предотвратит его сильные вибрации и лишние движения.
Надеемся, что данная запись помогла вам справиться с самостоятельным подключением мотора стиральной машинки. Продолжайте читать наш сайт и удачного дня!
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90°).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте.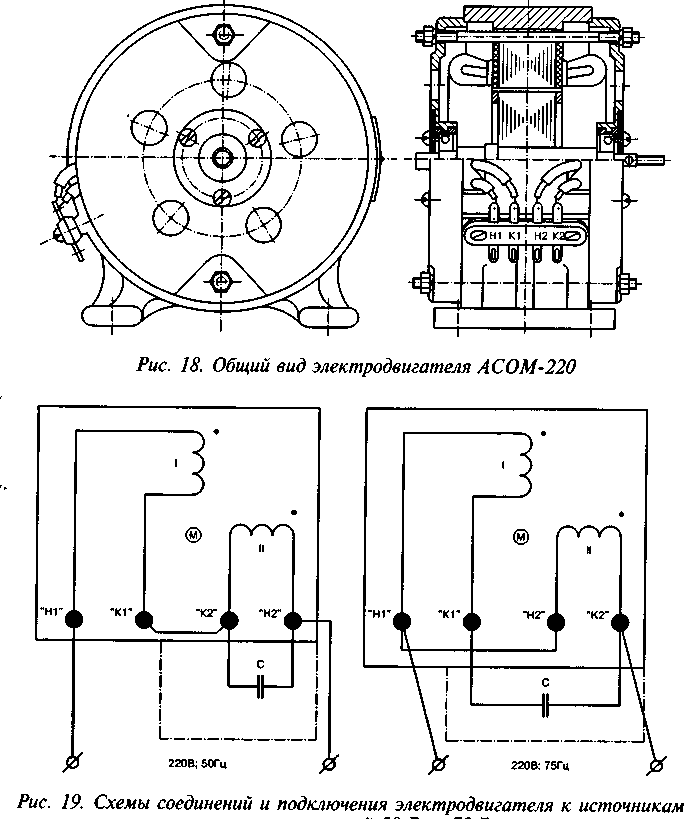 Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный.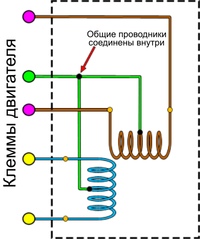 Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим — ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.
Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Если подавать уровни не «0» — «½» — «1» (как на картинке), а «0» — «¼» — «½» — «¾» — «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления — доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.
Пример работы шаговых двигателей с разными видами роторов:
Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
Драйверы делятся на две категории:
- Повторяющие форму сигналов. Этот тип драйверов не формирует импульсы, а лишь повторяет их форму для управления двигателем. Формирование импульсов отводится микроконтроллерам (например Arduino). К этой категории относятся такие драйверы как MotorShield на базе чипа L298.
- Формирующие сигналы управления. Используя данный тип драйверов, можно обойтись без микроконтроллеров, так как для их работы достаточно подать меандр и выбрать режимы работы. К этой категории относятся такие драйверы как например A4988.
 Формирование импульсов отводится микроконтроллерам (например Arduino). К этой категории относятся такие драйверы как MotorShield на базе чипа L298.
Формирование импульсов отводится микроконтроллерам (например Arduino). К этой категории относятся такие драйверы как MotorShield на базе чипа L298.Как подключить шаговые двигатели
Контроллер ЧПУ Buildbotics предоставляет четыре биполярных драйвера шаговых двигателей. Он не может управлять униполярными шаговыми двигателями. К счастью, большинство шаговых двигателей можно подключить как биполярные.
Для подключения шагового двигателя к контроллеру Buildbotics с ЧПУ необходимо правильно подключить четыре провода от драйвера к правым проводам на двигателе. К сожалению, шаговые двигатели бывают самых разных конфигураций, и не всегда сразу понятно, как их подключить.Шаговые двигатели отличаются друг от друга по нескольким характеристикам. Одно большое отличие — это количество проводов, идущих от двигателя. Нередко встречаются двигатели с 4, 5, 6 или 8 проводами, выходящими из двигателя. В этой статье обсуждается каждая из этих конфигураций.
Контроллер ЧПУ Buildbotics обеспечивает четыре выхода драйверов двигателей через заднюю панель на портах, обозначенных X, Y, Z и A. Все четыре этих порта имеют одинаковую проводку и выглядят следующим образом:
Каждый выход имеет четыре контакта.Верхний левый штифт — B +, нижний левый — B-, верхний правый — A-, а нижний правый — A +. B- и B + должны управлять одной из катушек двигателя, а A- и A + должны управлять другой катушкой двигателя.
Buildbotics предоставляет готовые кабели, которые подключаются к выходам драйверов на одном конце. Эти кабели имеют цветовую кодировку: провод A + красный, провод A- черный, провод B + желтый, а провод B- фиолетовый.
Подключение 4-проводных двигателей
Для подключения 4-проводных шаговых двигателей необходимо подключить A + и A- к одной из катушек двигателя, а B + и B- — к другой катушке двигателя.
Хитрость заключается в том, чтобы выяснить, какие провода составляют пары катушек. Вот три способа выяснить это:
- Найдите документацию на двигатель. Предполагая, что у вас его еще нет, прочтите номер модели двигателя, а затем поищите его в Интернете. Приложив немного усилий, обычно можно получить техническое описание двигателя. В таблице данных обычно указываются провода A +, A-, B + и B- или, по крайней мере, указывается, какие провода по цвету прикреплены к каким катушкам.
- Если вы не можете найти техническое описание, но у вас есть омметр, измерьте сопротивление между любыми двумя проводами двигателя.Если вы измеряете почти короткое замыкание, то эта пара составляет одну катушку, а два других провода — вторую катушку. Если это разрыв, измерьте расстояние между первым проводом и другим проводом, а затем до четвертого провода, пока не найдете почти короткое замыкание. Обратите внимание, что я говорю «почти короткий», потому что катушка представляет собой длинный тонкий провод и имеет некоторое сопротивление. После того, как пары идентифицированы, произвольно назначьте одну пару как «A», а другую как «B» и произвольно назначьте один провод как «+», а другой как «-» в каждой паре.Затем подключите провода, как показано. При таком подключении существует вероятность 50%, что двигатель повернет назад. Если он поворачивается в неправильном направлении, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.
- Если у вас нет омметра, большинство людей может определить пары наощупь. Валы шаговых двигателей довольно легко поворачиваются, когда катушки двигателя разомкнуты, но их труднее вращать, когда катушка закорочена. Во-первых, оставьте все четыре катушки двигателя открытыми и поверните вал двигателя, чтобы почувствовать, насколько тяжело его вращать.Затем скрутите два любых провода вместе. Если двигатель вращать значительно труднее, значит, вы замкнули одну из катушек и определили пару. Если нет, отсоедините два провода друг от друга и подключите третий провод к первому. Если мотор не становится труднее вращаться, отсоедините третий провод от первого и подключите четвертый провод. Одну из комбинаций должно быть труднее повернуть, это одна катушка, а два провода составляют другую катушку. После того, как пары идентифицированы, произвольно назначьте одну пару как «A», а другую как «B» и произвольно назначьте один провод как «+», а другой как «-» в каждой паре.Затем подключите провода, как показано. При таком подключении существует вероятность 50%, что двигатель повернет назад. Если он поворачивается в неправильном направлении, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.
 Если мотор не становится труднее вращаться, отсоедините третий провод от первого и подключите четвертый провод. Одну из комбинаций должно быть труднее повернуть, это одна катушка, а два провода составляют другую катушку. После того, как пары идентифицированы, произвольно назначьте одну пару как «A», а другую как «B» и произвольно назначьте один провод как «+», а другой как «-» в каждой паре.Затем подключите провода, как показано. При таком подключении существует вероятность 50%, что двигатель повернет назад. Если он поворачивается в неправильном направлении, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.
Если мотор не становится труднее вращаться, отсоедините третий провод от первого и подключите четвертый провод. Одну из комбинаций должно быть труднее повернуть, это одна катушка, а два провода составляют другую катушку. После того, как пары идентифицированы, произвольно назначьте одну пару как «A», а другую как «B» и произвольно назначьте один провод как «+», а другой как «-» в каждой паре.Затем подключите провода, как показано. При таком подключении существует вероятность 50%, что двигатель повернет назад. Если он поворачивается в неправильном направлении, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.Подключение 5-проводных двигателей
5-проводные двигатели являются строго однополярными двигателями и не могут быть подключены как биполярные двигатели. Таким образом, они несовместимы с контроллером ЧПУ Buildbotics.
Подключение 6-проводных двигателей
6-проводные двигатели могут быть сконфигурированы как униполярные или как последовательные биполярные двигатели.Контроллер ЧПУ Buildbotics не поддерживает униполярные двигатели. Здесь показаны биполярные последовательные соединения.
6-проводные двигатели имеют две катушки с отводами и открывают концы катушек и центральный проводник с отводами. Это по три провода на каждую из двух катушек. Центральные отводы не подключены, а концы катушек подключены, как показано. Хитрость заключается в том, чтобы выяснить, какие провода принадлежат каждой катушке и какой из этих проводов является центральным проводником. Вот два метода:
- Найдите документацию на двигатель.Предполагая, что у вас его еще нет, прочтите номер модели двигателя, а затем поищите его в Интернете. Возможно, вам придется позвонить поставщику. Приложив немного усилий, обычно можно получить техническое описание двигателя. В таблице данных обычно указываются провода A +, A-, B + и B- или, по крайней мере, указывается, какие провода по цвету прикреплены к каким катушкам.
- Используйте омметр для определения отдельных катушек. Любые провода, которые кажутся подключенными через несколько Ом, будут частью одной катушки.Провода, которые кажутся открытыми, являются частью различных катушек. Произвольно выберите одну из катушек как «A», а другую как «B». После идентификации катушек измерьте сопротивление между каждым из трех проводов этой катушки. Сопротивление между двумя концами катушки будет примерно в два раза больше сопротивления между любым концом катушки и центральным отводом катушки. Когда концы катушки определены, произвольно выберите один из концов как «+», а другой как «-» для каждой катушки. Затем подключите провода, как показано.При таком подключении существует вероятность 50%, что двигатель повернет назад. Если он поворачивается в неправильном направлении, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.

Подключение 8-проводных двигателей
Восьмипроводные двигатели могут быть сконфигурированы как униполярные, биполярные последовательные или биполярные параллельные двигатели. Контроллер ЧПУ Buildbotics не поддерживает однополярные соединения. Перед настройкой 8-проводного двигателя необходимо сначала решить, следует ли настроить двигатель как биполярный последовательный или как двухполюсный параллельный двигатель.Биполярные двигатели с параллельным подключением обычно обеспечивают более высокую максимальную скорость, но потребляют в два раза больше тока, чем двигатель, подключенный последовательно. Последовательная конфигурация должна использоваться, если ток параллельной конфигурации превышает выходные возможности драйвера. Это особенно актуально для двигателей большего размера. В случае контроллера ЧПУ Buildbotics максимальный ток составляет 6 ампер для любого отдельного порта двигателя.
На следующей схеме показаны подключения для 8-проводного последовательного биполярного шагового двигателя.
На следующей схеме показаны соединения для 8-проводного параллельно подключенного биполярного шагового двигателя.
Перебрать все возможные комбинации подключений омметром или наощупь нереально. Чтобы подключить его, вам понадобится техническое описание двигателя. Предполагая, что у вас его еще нет, прочтите номер модели двигателя, а затем поищите его в Интернете. Возможно, вам придется связаться с продавцом, чтобы получить техническое описание двигателя. В таблице данных обычно указываются провода A1 +, A1-, A2 +, A2-, B1 +, B1-, B2 + и B2- или что-то в этом роде.Учитывая эту информацию, просто подключите двигатели, как показано на схемах выше.
Вычисление проводки шагового двигателя | Hackaday
Есть много интересных проектов, которые вы можете сделать с шаговыми двигателями, взятыми из старых принтеров или дисководов. Однако не всегда понятно, как подключиться к какому-нибудь странному двигателю без маркировки и схемы. У [Corvetteguy50] есть видео, демонстрирующее его уловку для легкой отработки соединений, и вы можете увидеть его ниже.
Основная идея проста.Используя специальное приспособление, он подключает светодиод к двум случайным контактам и раскручивает двигатель. Если светодиод горит, значит, вы нашли катушку. Вы просто еще не знаете, какая катушка. Вы также можете замкнуть два провода и отметить, когда вы чувствуете сопротивление при вращении вала.
Это становится немного сложнее с некоторыми типами двигателей, например с теми, у которых есть выходы энкодера, которые ничего не делают для управления двигателем. У других есть провод заземления корпуса. Шаговые двигатели имеют 4, 5, 6 или 8 проводов привода, поэтому, если у вас на один больше, чем любое из этих чисел, это, скорее всего, провод заземления.
Есть и другие способы определить распиновку, особенно если у мотора 4 или 6 проводов. Для 4-проводного двигателя вы можете измерять сопротивление, пока не найдете пару с относительно низким сопротивлением. Затем вам просто нужно угадать, какой из них A, а какой B. Если вы угадаете неверно, двигатель будет вращаться в обратном направлении, поскольку это биполярные двигатели.
Для 6-проводного устройства два дополнительных провода представляют собой центральные отводы, а в 5-проводном двигателе оба центральных отвода будут связаны вместе. Измерение сопротивления между двумя проводами должно дать вам одно из трех показаний.Если вы читаете обрыв цепи, вы находитесь на двух разных катушках. Если вы прочитали сопротивление, вы можете записать его и измерить еще несколько пар. Показания сопротивления будут сгруппированы вокруг двух разных значений. Пары с более высокими значениями — это концы катушки. Остальные два провода — это центральные ответвители, и вы можете сказать, к какому концу они подключены. Конечно, в 5-проводном двигателе останется только один провод. Эти двигатели могут использоваться только в однополярной конфигурации, но 6- или 8-проводные двигатели могут использоваться и в той, и в другой.
Если вам нужна дополнительная информация об этих типах двигателей, мы много рассказывали о них за эти годы. Управление одним из них вручную тоже довольно информативно. Есть также классический Джонс на шаговых двигателях.
Учебное пособие по подключению шагового двигателя
— 42 бота
Иногда вы можете встретить старый шаговый двигатель, спасенный от принтера, или старый дисковод для гибких дисков. Если вам повезет, на двигателе будет номер детали, и, покопавшись, вы получите техническое описание.Однако часто у вас будет двигатель без какой-либо маркировки, а из него торчат четыре или шесть разноцветных проводов. Во-первых, вам нужно выяснить, как провода соединены в пары для образования катушек внутри двигателя. Метод проб и ошибок может сработать, но есть способ лучше! Все, что нужно, — это мультиметр.
Как определить пары катушек четырехпроводного шагового двигателя с помощью мультиметра
Если ваш шаговый двигатель имеет 4 провода, это биполярный шаговый двигатель. Биполярные шаговые двигатели имеют две обмотки, которые не соединены друг с другом и имеют внутреннюю разводку следующим образом:
Поскольку катушки A и B на схеме выше не подключены, сопротивление между выводами A1 и B1 или между A1 и B2 будет бесконечным.Сопротивление между A1 и A2 или между B1 и B2 будет определенно меньше бесконечного (хотя и больше нуля), поскольку они являются частью одной обмотки. Физическое расположение проводов или цвета могут иногда указывать на соединение, как на фотографиях ниже. Тем не менее, простая проверка с помощью мультиметра, настроенного на опцию измерения сопротивления, может сэкономить вам много времени на устранение неполадок вашего кода и проводки.
Изображение 1: Черный и желтый провод не являются частью одной катушки, так как мультиметр показывает высокое (бесконечное) сопротивление
Изображение 2: Оранжевый и желтый провод являются частью одной катушки, так как мультиметр показывает сопротивление примерно 18 Ом.
Теперь, когда мы определили, какие провода принадлежат каждой катушке, как определить правильную полярность шагового двигателя? К сожалению, это невозможно сделать с помощью мультиметра… Подключите двигатель к выбранному приводу. Подключите питание и запустите код, чтобы вращать двигатель по часовой стрелке. Если двигатель вращается в ожидаемом направлении, у вас правильная полярность. Если он вращается в обратном направлении, вам нужно поменять полярность одной из двух пар (неважно какой).
Как определить пары катушек шестипроводного шагового двигателя с помощью мультиметра
Шаговые двигателис шестью проводами являются униполярными и имеют по одной обмотке на фазу (как биполярные шаговые двигатели), но с центральным ответвлением. Внутренняя проводка этих моторов выглядит так:
Глядя на диаграмму выше, мы можем предположить, что сопротивление между A1 и AC будет вдвое меньше, чем между A1 и A2. Это потому, что между AC и A1 меньше провода, чем между двумя концами катушки A, A1 и A2.То же самое относится к сопротивлению между BC и B1 или B2. Как и в случае с двухполюсным 4-проводным шаговым двигателем, нет соединения (бесконечного сопротивления) между любыми проводами от катушки B и катушки A. Пришло время проверить теорию!
Изображение 3: Черный и Коричневый провода, очевидно, являются частью одной катушки (сопротивление примерно 194 Ом)
Изображение 4: Черный и верхний красный провод (на этом шаговом двигателе два красных провода) также являются частью одной катушки (сопротивление приблизительно 97 Ом).
Верхний красный должен быть центральным отводом катушки с черным и коричневым проводами, поскольку сопротивление между красным и черным проводами вдвое меньше сопротивления между черным и коричневым проводами. Для правильного измерения вы также должны измерить сопротивление между верхним красным и коричневым проводом, чтобы убедиться, что оно также составляет около 97 Ом.
Изображение 5: Желтый провод не должен быть частью той же катушки, что и черный, коричневый и верхний красный провод.Мультиметр показывает отсутствие электрического соединения между желтым и черным проводами.
Чтобы убедиться в этом, я также дважды проверил сопротивление между нижним красным проводом и желтым проводом, а также сопротивление между желтым и оранжевым проводами. Другое измерение подтвердило, что два красных провода также не подключены.
Окончательный приговор:
Одна катушка — это черный и коричневый провода, с верхним красным проводом в качестве центрального отвода.
Другая катушка — это желтый и оранжевый провода, с нижним красным проводом в качестве центрального отвода.
Если у вашего двигателя 5 проводов. проверьте, не подключен ли один из проводов к корпусу двигателя. Если это так, отметьте его и затем выполните те же испытания, что и для четырехпроводного шагового двигателя. Если нет, то вы смотрите на униполярный двигатель, в котором соединены два центральных выступа. Дешевый шаговый двигатель 28byj-48 (см. Руководство) является примером этого.
Вы по-прежнему можете использовать тест сопротивления для определения центрального отвода, но сопротивление между остальными 4 проводами будет таким же из-за общего центрального отвода.Здесь пригодятся метод проб и ошибок или хорошая документация.
Если у вашего двигателя 8 проводов, внутренняя проводка должна выглядеть следующим образом.
У меня еще никогда не было такого типа степперов, поэтому не могу говорить об этом по своему опыту, но использование мультиметра и проверка проводов в паре должны дать вам пары (в конечном итоге). Вам нужно будет проделать дополнительную работу, чтобы определить, какие пары находятся на одной катушке. Скорее всего, это потребует некоторых проб и ошибок, используя драйвер шагового двигателя.
Подключение шагового двигателя— RepRap
О всех шаговых драйверах RepRap биполярный (в отличие от униполярного ), поэтому, если вы используете стандартные драйверы, вам понадобится шаговый двигатель, который может быть подключен как биполярный.
Для правильного подключения любого шагового двигателя нам необходимо определить, какие провода являются «парами» или подключены к концам каждой катушки. Их обычно называют катушкой «А» и катушкой «В», но это не так важно, как вы думаете.
На этом рисунке показано подключение 6-проводных шаговых двигателей:
Четырехпроводные двигатели не имеют общего провода. Мы будем использовать все четыре провода, и нам нужно только определить, какие провода составляют две пары.
Пятипроводные двигатели имеют эти два общих провода на каждой катушке, соединенных внутри и открытых как только один провод. Эта конфигурация не будет работать со стандартной электроникой RepRap. Если вы не откроете шаговый двигатель и не переприсваете его изнутри, вам понадобится другой двигатель.BrickRap использует пятипроводные двигатели 28BJY-48 с приводом от двигателя Pololu. У мотора 28BJY-48 один из проводов удален / отрезан, поищите в Google «биполярный мотор» , инструкции, hackaday и т. Д.
Шестипроводные двигатели подключены, как показано. Мы не будем использовать два общих провода, но в остальном они идентичны четырехпроводной версии.
Восьмипроводные двигатели имеют независимый провод на каждом конце этих четырех катушек. Вы соединяете внутренние концы катушек друг с другом, чтобы получился шестипроводный двигатель, а затем игнорируете их и смотрите на четырехпроводной двигатель.Проводка сложна, см. Ниже.
Разъемы, обжим и повторная установка контактов
Обычным разъемом, используемым на шаговых двигателях, является серия JST-PH, в частности JST-PH6 (стиль JST, серия PH, 6 позиций), деталь Digikey № 455-1162-ND. Контакты для этих разъемов доступны у таких поставщиков, как DigiKey, и правильный номер детали для обычного провода 24AWG — 455-2148-1-ND, другие размеры см. В соответствующих продуктах. Для тех, у кого нет обжимного инструмента или кто не хочет хлопот, JST теперь имеет разъем IDC (Insulation Displacing Connector), который не требует использования каких-либо специализированных инструментов.Номер детали DigiKey для совместимого 6-контактного разъема JST-PH (исх. Номер 06KR-6H-P): 455-2687-ND.
Для обжима не рекомендуется делать это вручную с помощью плоскогубцев или покупать инструмент производителя за 1500 долларов, вместо этого вы можете легко использовать инструмент без храпового механизма, такой как Sargent Tools 1026CT, который стоит 30 долларов, или Waldom / GC. Электроника W-HT-1921 стоит 20 долларов от DigiKey.
Повторное закрепление разъема возможно, и это довольно легко сделать, если аккуратно согнуть пластмассовый фиксатор для отдельного штифта на разъеме, осторожно оттянув провод от корпуса разъема.Не тяните за трос, пока не поднимете фиксирующий язычок, так как фиксирующая шпилька на самом штифте может зацепиться за язычок жатки, что затруднит весь процесс. Чтобы снова вставить штифт, требуется только сила, достаточная для того, чтобы стопорная шпилька прошла за язычок фиксатора и защелкнулась.
Провода
Может иметь размер 26AWG, описанный как используемый в различных двигателях Wantai, или 24AWG, упомянутый ниже и в [[1]]. Кабель Ethernet и провод 28AWG, скорее всего, не подходят для двигателей большой мощности. Вам нужен многожильный провод, а не одинарный, чтобы нити могли слегка растягиваться, чтобы избежать внезапного натяжения.
Методы и процедуры
Так как же определить, какой провод какой? Вот вам процесс.
Примечание по концевым упорам : некоторые прошивки RepRap (например, Marlin) будут искать концевые упоры для подключения во время тестирования проводки двигателя, как указано выше. В этом случае вы можете увидеть, как ваш двигатель плавно движется в одном направлении, но не в другом (поскольку он думает, что сработал конечный останов). Если ваша прошивка позволяет отключать концевые ограничители, вам следует сделать это для проверки проводки двигателя или, в качестве альтернативы, вы можете подключить двигатель к разъему шагового двигателя экструдера, чтобы убедиться, что он плавно перемещается в каждом направлении.
«пара» проводов на 4-проводных двигателях
Речь идет о поиске двух пар проводов, которые подключены к каждой из двух катушек.
- Метод с омметром
- Просто измерьте сопротивление пары проводов. Если сопротивление составляет всего несколько Ом (<100 Ом), вы нашли пару. Два других провода должны составлять вторую пару.
- Методы без омметра
- Сначала попробуйте повернуть двигатель пальцами и обратите внимание на то, насколько это сложно.Затем склейте провода попарно. Если мотор начинает работать заметно сильнее, значит, вы нашли пару.
- Другой метод — использовать светодиод, поднести любые два провода к концам светодиода и повернуть двигатель (вращать в обоих направлениях). Светодиод загорится, если провода пара, меняйте местами провода, пока не зажжете ВЕЛ.
- Метод проб и ошибок
- (Воспроизведено из этого руководства с любезного разрешения Rustle Laidman на StepperWorld.com.)
- Подключите 4 провода катушки к контроллеру в любом порядке. Если сначала это не сработает, вам нужно всего лишь попробовать эти 2 обмена:
| Имя | А | B | С | D |
|---|---|---|---|---|
| Произвольный первый порядок подключения | 1 | 2 | 4 | 8 |
| Концевая пара переключателя | 1 | 2 | 8 | 4 |
| Средняя пара переключателя | 1 | 8 | 2 | 4 |
- Все готово, когда двигатель плавно вращается в любом направлении.Если двигатель вращается в направлении, противоположном желаемому, поменяйте местами провода, чтобы ABCD превратился в ABDC (поменять местами одну катушку) или DCBA (повернуть всю вилку).
- Эта процедура не всегда работает в два этапа (например, если в вашей настройке необходимо, чтобы «1» совпало с «4»). Поменять местами 2-й на 4-й, затем 2-й на 3-й будет более надежным.
«пара» проводов на 6-проводных двигателях
На шестипроводных двигателях вы найдете две группы по три провода, в которых все три провода электрически соединены друг с другом.Эти провода подключены к одной катушке: один в центре катушки, два на концах. Соответственно, две из возможных пар имеют меньшее сопротивление, одна пара — большее. Возьмите пару с более высоким сопротивлением и не обращайте внимания на третий провод.
Здесь также может работать метод без омметра. Ожидайте не две, а три стадии разворачивающего сопротивления. Вам нужны две пары, которые дают наибольшее сопротивление повороту.
После того, как вы выяснили, какие два из шести проводов игнорировать (по одному в каждой группе), вы можете действовать, как если бы у вас были четырехпроводные двигатели.
спичечные катушки для 8-проводных шаговых двигателей
Если у вас 8-проводный шаговый двигатель, у вас будет 4 катушки. Вам нужно определить, какие пары катушек «одинаковые». Есть две «пары», которые по сути одинаковы. Вы хотите соединить эти две пары последовательно, чтобы у вас было только две катушки, каждая в два раза длиннее. Их также необходимо соединить так, чтобы две катушки «складывались» друг с другом — полярность имеет значение.
Самый простой способ — найти техническое описание. В то время как другие типы шаговых двигателей упрощают определение правильных катушек, вероятно, будет проще и быстрее прочитать техническое описание 8-проводных двигателей.
Если вы не можете найти таблицу, еще не все потеряно. Выберите наугад две катушки, подключите их и посмотрите, работает ли. Если он поворачивается, у вас есть две катушки, которые не являются половинками одной катушки. Затем вы можете «добавлять» другие катушки по одной, пробуя разные конфигурации и полярности, пока вы не определите не только, какие две катушки какие, но и каким образом они должны быть подключены. Подумайте над этим, это просто, но несколько запутанно. Поскольку нас не волнует, в каком направлении поворачивается шаговый двигатель, мы можем исключить множество возможностей и просто задать себе простой вопрос «он поворачивается?».
Вставьте его в драйвер шагового двигателя
Чтобы шаговый двигатель просто двигался, полярность каждой катушки не имеет значения, равно как и не имеет значения, какая катушка какая. Поэтому убедитесь, что каждая пара проводов для катушки находится вместе на одной стороне вилки (или другой стороне для другой катушки), и подключите ее.
Двигатель движется в неправильном направлении
Чтобы двигатель двигался в правильном направлении, действительно имеет значение, какая катушка какая и какова полярность катушек.Однако, если они ошибаются, двигатель просто вращается не в ту сторону, это легко исправить, поменяв местами провода. Выберите один из следующего, чтобы изменить направление шагового двигателя:
- Переключение полярности любой (одной) катушки, например, изменение ABCD на BACD или ABCD на ABDC.
- Замена катушек, как замена ABCD на CDAB.
- Направление шага также можно изменить в прошивке.
- Вставка вилки в обратном направлении (если вилки вашей электроники это позволяют).Это меняет местами катушки и меняет местами как катушку A, так и катушку B. Таким образом, эффект заключается в изменении направления 3 раза, что дает общий эффект, такой же, как изменение направления один раз. Лишь немногие электронные устройства позволяют это, потому что вам нужно рассчитывать правильный путь не один раз, а каждый раз, когда вы подключаете шаговый двигатель.
Дополнительная литература
- StepperMotor содержит список известных работающих шаговых двигателей, список известных работающих драйверов шаговых двигателей и еще несколько советов.
- Контур управления двигателем определяет различные системы контуров управления двигателем
- NEMA Motor описывает стандарты NEMA для шаговых двигателей — в частности, что означает «NEMA 17».
Электропроводка и соединения шагового двигателя | Электрические схемы
Раздел 5: Подключение двигателяШаговые двигатели имеют четыре, шесть или восемь проводов; Старые двигатели могут иметь пять проводов, но здесь они не рассматриваются.
Четырехпроводные двигатели наиболее просты в подключении и не имеют вариантов подключения. Просто подключите одну обмотку к клеммам, обозначенным «Phase A» и «Phase / A», а другую обмотку — к клеммам, которые имеют надписи «Phase B» и «Phase / B».Если неизвестно, какие провода к какой фазе принадлежат, просто используйте омметр и проверьте, какие провода имеют целостность. Те, которые имеют непрерывность, будут принадлежать к одной и той же фазе; если двигатель вращается в неправильном направлении при подключении, просто поменяйте местами «Фаза A» и «Фаза / A». Типичное четырехпроводное подключение двигателя показано на Рисунке 8.
Рисунок 8
Шестипроводные двигатели являются наиболее распространенными. Возможны два варианта подключения: полнообмоточный и полуобмоточный. Шестипроводный двигатель аналогичен четырехпроводному двигателю, за исключением того, что на каждой из двух обмоток имеется центральный отвод, всего шесть проводов.Для соединения половинной обмотки используется центральный отвод и один из оконечных проводов. Это показано на Рисунке 9.
Рисунок 9
Для соединения с полной обмоткой, как показано на Рисунке 10, центральный отвод игнорируется и используются оба концевых провода. Термин «полная обмотка» в точности эквивалентен «последовательному» соединению, в то время как «полуобмотка» практически идентична «параллельному» соединению. Выбор между ними зависит от приложения, что обсуждается позже; просто не забудьте установить ток привода ровно на половину номинального униполярного тока двигателя, если он подключен к полной обмотке, и установить его на номинальный униполярный ток, если он подключен к половинной обмотке.
Рисунок 10
Восьмипроводные двигатели примерно на 3% более эффективны при параллельном подключении, чем эквивалентный шестипроводный двигатель, подключенный к полуобмотке, но их гораздо сложнее подключить. Нет никакого преимущества при сравнении последовательного соединения с полнообмоточным соединением. Как и в шестипроводном двигателе, выбор между последовательным или параллельным подключением зависит от области применения. Не забудьте установить ток привода ровно на половину номинального тока параллельного двигателя (как показано на рисунке 11) при использовании последовательного соединения, показанного на рисунке 12.
Рисунок 11
Рисунок 12
Просмотрите выбор Geckodrive высококачественных драйверов шагового двигателя для ваших потребностей в управлении движением.
Была ли эта статья полезной? 1932 из 3748 считают этот материал полезным
Выбор и подключение шаговых двигателей
В платах Duet используются драйверы биполярных шаговых двигателей.Это означает, что вы можете использовать шаговые двигатели, подходящие для биполярного привода, которые имеют 4, 6 или 8 проводов. Вы не можете использовать двигатели с 5 проводами, потому что они предназначены для работы только в однополярном режиме. (Некоторые униполярные двигатели можно превратить в биполярные, вырезав дорожку на печатной плате.)
Проще всего подключить 4-проводные двигатели. Внутри шагового двигателя находятся две катушки, каждая из которых имеет провод, подключенный к каждому концу. Пары проводов и катушек называются фазой. 4 провода соответствуют 4 выходным контактам каждого шагового драйвера на Duet (см. Ниже для определения фаз и подключения).
В 6-проводных шаговых двигателях по-прежнему используются 2 катушки, но каждая катушка имеет центральный отвод, что при необходимости эффективно разрезает катушку пополам. Это создает дополнительный провод для каждой катушки. Вы можете запустить их в режиме полукатушки, оставив два концевых провода неподключенными, или в режиме полной катушки, оставив центральные провода неподключенными. См. Технические характеристики двигателя, чтобы убедиться, что ваш Duet может обеспечивать достаточный ток для того, как вы хотите их подключить.
8-проводный шаговый двигательимеет 4 катушки, поэтому с двумя проводами на катушку получается 8 проводов.Вы можете запустить 8-проводный шаговый двигатель в режиме полукатушки (с подключенными только 2 катушками) или в режиме полной катушки, а в режиме полной катушки вы можете подключить катушки последовательно или параллельно. В Интернете есть много другой документации о том, как это сделать, просто убедитесь, что Duet может справиться с текущими требованиями. В конечном итоге для подключения к Duet нам осталось всего 4 провода.
Это максимальный ток, который вы можете пропустить через обе обмотки одновременно. Максимальный ток через одну обмотку (что действительно важно при использовании микрошага) редко указывается и будет немного выше.Тем не менее, даже если одна обмотка работает на указанном номинальном токе, двигатель будет очень горячим. Таким образом, обычная практика — установить ток двигателя не более 85% от номинального тока. Следовательно, чтобы получить максимальный крутящий момент от ваших двигателей без их перегрева, вы должны выбирать двигатели с номинальным током не более чем на 25% выше рекомендованного максимального тока шагового драйвера. Это дает:
- Duet 0.6 и Duet 0.8.5 (рекомендуемый максимальный ток двигателя 1,5 А, пик) => Номинальный ток шагового двигателя <= 1.9A
- Duet 2 WiFi и Duet 2 Ethernet (максимальный ток двигателя 2,5 А, пик) => Номинальный ток шагового двигателя <= 3,0 А
- Duet 2 Maestro (максимальный ток двигателя 1,6 А пик при хорошем охлаждении вентилятора) => Номинальный ток шагового двигателя ток <= 1,7 А. Более того, если вы используете двигатели с более низким номинальным током (например, от 1,0 до 1,2 А) и мощностью 24 В, тогда драйверы будут работать меньше.
- Основная плата Duet 3 6HC и плата расширения 3HC (рекомендуемый максимальный ток двигателя 6,3 A пик / 4,45 A RMS) => Номинальный ток шагового двигателя <= 6A
- Duet 3 Tooboard (рекомендуемый максимальный ток двигателя 1.4A пик) => номинальный ток шагового двигателя <= 1,75A
Это максимальный крутящий момент, который двигатель может обеспечить с обеими обмотками, запитанными на полном токе, прежде чем он начнет прыгать ступеньки. Удерживающий момент, когда одна обмотка находится под напряжением при номинальном токе, примерно в 1 / sqrt (2) раза больше. Крутящий момент пропорционален току (за исключением очень низких токов), поэтому, например, если вы установите драйверы на 85% номинального тока двигателя, то максимальный крутящий момент будет 85% * 0,707 = 60% указанного удерживающего момента.
Крутящий момент возникает, когда угол ротора отличается от идеального угла, соответствующего току в его обмотках. Когда шаговый двигатель ускоряется, он должен создавать крутящий момент, чтобы преодолеть инерцию собственного ротора и массу нагрузки, которую он ведет. Чтобы создать этот крутящий момент, угол ротора должен отставать от идеального угла. В свою очередь, нагрузка будет отставать от позиции, заданной прошивкой.
Иногда можно увидеть, что микрошаг уменьшает крутящий момент.На самом деле это означает, что, когда предполагается, что угол запаздывания равен углу, соответствующему одному микрошагу (потому что вы хотите, чтобы положение было точным с точностью до одного микрошага), более высокий микрошаг подразумевает меньший угол запаздывания и, следовательно, меньший крутящий момент. Крутящий момент на единицу угла запаздывания (что действительно имеет значение) не уменьшается с увеличением микрошага. Другими словами, отправка двигателю одного микрошага 1/16 приводит к точно таким же фазным токам (и, следовательно, тем же силам), что и отправка ему двух микрошагов 1/32 или четырех микрошагов 1/64 и так далее.
Существует два соответствующих размера: номер размера Nema и длина. Номер размера Nema определяет квадратный размер корпуса и положение монтажных отверстий. Самый популярный размер для 3D-принтеров — Nema 17, у которого квадрат не более 42,3 мм и отверстия для крепления в квадрате со стороной 31 мм.
Двигатели Nema 17 бывают разной длины, от «блинов» длиной 20 мм до двигателей длиной 60 мм. Как правило, чем длиннее двигатель, тем больше его удерживающий момент при номинальном токе.Более длинные шаговые двигатели также имеют большую инерцию ротора. Все Duets должны иметь возможность управлять ими, хотя некоторые двигатели Nema 17 могут быть рассчитаны на ток до 2 А, что является пределом для Duet 2 Maestro (хотя вы всегда можете запускать двигатели с меньшим током).
Двигатели Nema 23 обладают более высоким крутящим моментом, чем двигатели Nema 17. Duet 2 (Wi-Fi и Ethernet) может управлять ими, если вы внимательно их выбираете, особенно в отношении номинального тока, до максимум около 2,8 А. Duet 3 должен иметь возможность управлять более крупными двигателями, до 5.5А. Вы должны использовать питание 24 В для Duet 2 и 32 В для Duet 3 для более мощных двигателей.
Двигатели Nema 34 еще больше, с большим крутящим моментом и обычно используются в приложениях с ЧПУ. Duet 3 также может управлять этими двигателями до 5,5 А. Для достижения высоких скоростей с большими двигателями вам может потребоваться более высокое напряжение, чем максимальное 32 В для Duet 3. Можно модифицировать Duet 3, увеличив его до 48 В и, возможно, до 60 В (что является пределом для шагового драйвера). хотя это аннулирует вашу гарантию; см. https: // форум.duet3d.com/post/133293
Есть два общих угла шага: 0,9 и 1,8 градуса на полный шаг, что соответствует 400 и 200 шагам / оборот. В большинстве 3D-принтеров используются двигатели 1,8 градуса на шаг.
Если не считать очевидной разницы в угле шага:
- Двигатели 0,9 градуса имеют немного более низкий удерживающий момент, чем аналогичные двигатели 1,8 градуса от того же производителя
- Однако для получения заданного крутящего момента угол запаздывания, необходимый для двигателя 0,9 градуса, составляет чуть больше половины угла запаздывания аналогичного 1 .8градусный мотор. Или, другими словами, при малых углах задержки двигатель 0,9 градуса имеет почти вдвое больший крутящий момент, чем двигатель 1,8 градуса при том же угле задержки.
- При заданной скорости вращения двигатель 0,9 градуса производит вдвое большую индуктивную обратную ЭДС, чем двигатель 1,8 градуса. Таким образом, вам обычно нужно использовать питание 24 В для достижения высоких скоростей с двигателями 0,9 градуса.
- Двигатели 0,9 градуса нуждаются в шаговых импульсах, которые должны подаваться на драйверы с удвоенной скоростью, чем двигатели 1,8 градуса. Если вы используете высокий микрошаг, тогда скорость может быть ограничена скоростью, с которой электроника может генерировать ступенчатые импульсы.Для решения этой проблемы можно использовать режим интерполяции с микрошагом 16x драйверов TMC2660 на Duet 2 WiFi / Ethernet. Драйверы Duet 2 Maestro и Duet 3 могут интерполировать при любых настройках микрошага.
Индуктивность двигателя влияет на то, насколько быстро драйвер шагового двигателя может управлять двигателем, прежде чем крутящий момент упадет. Если мы временно проигнорируем обратную ЭДС из-за вращения (см. Ниже), а номинальное напряжение двигателя намного меньше, чем напряжение питания драйвера, то максимальное количество оборотов в секунду до падения крутящего момента составит:
оборотов_за_секунду = (2 * напряжение_питания) / (шаги_на_об * пи * индуктивность * ток)
Если двигатель приводит в движение ремень GT2 через шкив, это дает максимальную скорость в мм / с как:
скорость = (4 * зубцы шкива * напряжение_питания) / (шаги_на_об * пи * индуктивность * ток)
Пример: a 1.Двигатель с 8 градусами на шаг (т.е. 200 шагов на оборот) с индуктивностью 4 мГн работает при 1,5 А с использованием источника питания 12 В, а привод ремня GT2 с шкивом с 20 зубьями начнет терять крутящий момент примерно со скоростью 250 мм / с. Это скорость ленты, которая на принтере CoreXY или delta отличается от скорости головки.
На практике крутящий момент упадет раньше, чем это, из-за противо-ЭДС, вызванной движением, и потому, что вышеупомянутое не учитывает сопротивление обмотки. Двигатели с низкой индуктивностью также имеют низкую обратную ЭДС из-за вращения.
Это означает, что если мы хотим достичь высоких скоростей, нам нужны двигатели с низкой индуктивностью и высокое напряжение питания. Максимальное рекомендуемое напряжение питания для Duet 2 WiFi / Ethernet составляет 25 В, для Duet 2 Maestro — 28 В, а для Duet 3 — 32 В.
Это просто сопротивление каждой фазы и падение напряжения на каждой фазе, когда двигатель неподвижен и фаза проходит свой номинальный ток (который является произведением сопротивления и номинального тока). Это неважно, за исключением того, что номинальное напряжение должно быть значительно ниже напряжения питания шаговых драйверов.
При вращении шагового двигателя возникает обратная ЭДС. При идеальном нулевом угле запаздывания он на 90 градусов не совпадает по фазе с управляющим напряжением и синфазно с обратной ЭДС из-за индуктивности. Когда двигатель развивает максимальный крутящий момент и находится на грани пропуска шага, он находится в фазе с током.
Обратная ЭДС из-за вращения обычно не указывается в технических данных, но мы можем оценить ее по следующей формуле:
приблизительный_пик_бэк_emf_due_to_rotation = sqrt (2) * пи * номинальный_ крутящий момент * обороты_в_секунду / номинальный_ток
Формула предполагает, что удерживающий момент задан для обеих фаз, запитанных номинальным током.Если указано, что только одна фаза находится под напряжением, замените sqrt (2) на 2.
Пример: рассмотрим шаговый двигатель 200, приводящий в движение каретку через шкив с 20 зубьями и ремень GT2. Это движение на 40 мм на оборот. Чтобы достичь скорости 200 мм / сек, нам нужно 5 об / сек. Если мы используем двигатель с удерживающим моментом 0,55 Нм, когда обе фазы работают на 1,68 А, пиковая обратная ЭДС из-за вращения составляет 1,414 * 3,142 * 0,55 * 5 / 1,68 = 7,3 В.
Насколько точна эта формула? dc42 измерил, а затем рассчитал обратную ЭДС для двух типов двигателей:
- 17HS19-1684S: измерено 24 В, рассчитано 24.24 В при условии, что удерживающий крутящий момент указан с обеими фазами при номинальном токе.
- JK42HS34-1334A: измерено 22 В, рассчитано 15,93 В с учетом удерживающего момента 0,22 Нм при подаче напряжения на обе фазы при номинальном токе. Возможно, удерживающий момент для этого двигателя указан только для одной фазы под напряжением, и в этом случае расчетное значение станет 22,53 В. Я также видел удерживающий момент для этого двигателя, указанный в другом техническом описании как 0,26 Нм, что увеличивает расчетное значение до 18,05 В.
Если у вас есть целевая скорость движения для вашего принтера, вы можете определить, по крайней мере, приблизительно, какое напряжение питания вам понадобится для драйверов двигателей. Вот как это делается на примере расчета:
- Определитесь с целевой скоростью движения. В этом примере я буду использовать 200 мм / сек.
- Исходя из заданной скорости движения, определите максимальную скорость ленты для наихудшего случая. Для декартового принтера наихудший случай — это чистое движение по оси X или Y, поэтому наихудшая скорость ленты совпадает со скоростью движения.Для принтера CoreXY наихудший случай — это движение по диагонали, и соответствующая скорость ленты в sqrt (2) раз больше скорости движения. Для дельта-принтера наихудший случай — это радиальное перемещение у края станины, а наихудший случай скорости ленты — это скорость движения, деленная на тангенс угла (тета), где тета — это наименьший угол диагонального стержня к горизонтали. На практике мы не можем использовать заданную скорость движения для радиальных перемещений вплоть до края кровати из-за расстояния, необходимого для ускорения или замедления, поэтому принимайте тета как угол, когда сопло находится примерно в 10 мм от края кровати. напротив башни.Для моей дельты это 30 градусов, поэтому максимальная скорость ленты составляет 200 / тангенс (30 градусов) = 346 мм / сек.
- Определите число оборотов двигателя в секунду при максимальной скорости ремня, разделив скорость ремня на шаг зубьев ремня (2 мм для ремней GT2) и количество зубьев на шкиве. Моя дельта использует шкивы с 20 зубьями, поэтому максимальное число оборотов в секунду составляет 346 / (2 * 20) = 8,7.
- Вычислить пиковую обратную ЭДС из-за индуктивности. Это обороты_за_секунду * пи * мотор_ток * мотор_индуктивность * N / 2, где N — количество полных шагов на оборот (так 200 для 1.Двигатели 8deg или 400 для двигателей 0.9deg). Мои двигатели имеют 0,9 градуса с индуктивностью 4,1 мГн, и я обычно использую их при токе 1 А. Таким образом, обратная ЭДС из-за индуктивности составляет 8,7 * 3,142 * 1,0 * 4,1e-3 * 400/2 = 22,4 В.
- Рассчитайте примерную обратную ЭДС за счет вращения. Из приведенной ранее формулы это sqrt (2) * pi * Rated_holding_torque * revs_per_second / Rated_current. Мои двигатели имеют номинальный ток 1,68 А и удерживающий момент 0,44 Нм, поэтому результат будет 1,414 * 3,142 * 0,44 * 8,7 / 1,68 = 10,1 В
- Желательно, чтобы напряжение питания драйвера было как минимум суммой этих двух обратных ЭДС. , плюс еще несколько вольт.Если у вас есть два двигателя, подключенных последовательно, то требуемое напряжение увеличивается вдвое.
В моем примере это дает 32,5 В, что выше рекомендуемого входного напряжения 25 В для Duet 2. Но, по крайней мере, мы знаем, что для наихудшего случая дельта-перемещения со скоростью движения 200 мм / с, если я использую 24 В. тогда мощность составляет более 2/3 от теоретического значения, поэтому крутящий момент, доступный для этого движения, не должен уменьшаться более чем примерно на 1/3 от обычного доступного крутящего момента. С другой стороны, источника питания 12 В явно недостаточно — это объясняет, почему я смог достичь только 150 мм / сек, прежде чем я обновил принтер до 24 В.
На сайте https://www.reprapfirmware.org/ есть онлайн-калькулятор, позволяющий сделать это наоборот (т.е. вычислить скорость, с которой начинает падать крутящий момент).
- Если вы не будете использовать внешние драйверы шагового двигателя, выбирайте двигатели с номинальным током не менее 1,2 А и не более 2,0 А для Duet 0.6 и Duet 0.8.5, 3 А для Duet 2, 7 А для Duet 3 основного и платы расширения и 1,7 А для панелей инструментов Duet 3 или Duet 2 Maestro.
- Запланируйте работу каждого шагового двигателя на уровне от 50% до 85% его номинального тока.
- Размер: Nema 17 — самый популярный размер, используемый в 3D-принтерах. Nema 14 — это альтернатива экструдеру с высоким редуктором. Используйте двигатели Nema 23, если вы не можете получить достаточный крутящий момент от длинных двигателей Nema 17. Duet 3 также может приводить в движение моторы Nema 34.
- Избегайте двигателей с номинальным напряжением (или произведением номинального тока и фазного сопротивления)> 4 В или индуктивностью> 4 мГн.
- Выберите 0,9 град. / Шаговые двигатели, если вам нужна дополнительная точность позиционирования, например для башенных двигателей дельта-принтера.В противном случае выберите 1,8-градусные / шаговые двигатели.
- Если вы используете какие-либо двигатели с шагом 0,9 градуса / шаг или двигатели с высоким крутящим моментом, используйте питание 24 В, чтобы вы могли поддерживать крутящий момент на более высоких скоростях.
- При использовании экструдера с высоким редуктором (например, экструдера, в котором используется гибкий приводной кабель для передачи крутящего момента от двигателя на червячный редуктор), используйте для его привода короткий низкоиндуктивный двигатель 1,8 град / шаг.
Номера дисков, используемые в G-коде, соответствуют следующим меткам драйверов на плате (ах):
| Номер привода | Duet 3 этикетка платы | Duet 2 WiFi / Ethernet этикетка платы | Duet 2 Maestro этикетка платы | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | DRIVER_0 | X 9026ER3 | 1 | Y | |||||||
| 2 | DRIVER_2 | ZA ZB (два соединителя последовательно соединены) | |||||||||
| 3 | DRIVER_3 | E0 | |||||||||
| 4 | DRIVER_5 | E2 (на Duex 2/5) | E2 (контакты для внешнего драйвера) | ||||||||
| 6 | E3 (On Duex 2/5) | E3 (контакты для внешнего драйвера) | |||||||||
| 7 | E4 (On Duex 5) | ||||||||||
| 8 | E5 (On Duex 5) | ||||||||||
| 9 | E6 (On Duex 5) | ||||||||||
| 10 | На заголовке LCD_CONN | ||||||||||
| 11 | На заголовке LCD_CONN | ||||||||||
Чтобы увидеть точное расположение контактов, проверьте электрические схемы здесь:
Схема подключенияDuet 3
Схема подключенияDuet 2 WiFi / Ethernet
Схема подключенияDuet 2 Maestro
Duet 3 имеет 6 встроенных шаговых драйверов.Duet 2 WiFi, Ethernet и Maestro имеют 5 встроенных драйверов шагового двигателя.
Для подключения шаговых двигателей к внутренним драйверам см. Электрическую схему Duet 3, электрическую схему Duet 2 WiFi / Ethernet или электрическую схему Duet 2 Maestro. Распиновка каждого разъема шагового двигателя такая же, как у другой популярной электроники 3D-принтера.
Для ВСЕХ ДУЭТОВ необходимо подключить два провода одной фазы шагового двигателя к двум контактам на одном конце разъема, а провода другой фазы — к двум контактам на другом конце. См. Следующий раздел, чтобы определить фазы вашего двигателя.
Каждый разъем шагового двигателя имеет четыре контакта. В Duet 2 WiFi / Ethernet они помечены как «2B 2A 1A 1B» на задней стороне платы и на схеме подключения. «1» и «2» относятся к катушке или фазе, «A» и «B» относятся к положительному и отрицательному.
В моделях Duet 2 Maestro и Duet 3 четыре контакта разъема двигателя помечены как «B1 B2 A1 A2» на задней стороне платы и на схеме подключения.«A» и «B» относятся к катушке или фазе, «1» и «2» относятся к положительному и отрицательному. Это соглашение об именах, используемое большинством производителей шаговых двигателей.
Осторожно! Перепутывание фаз на 4-контактном разъеме может и часто приводит к повреждению шагового драйвера. Поэтому убедитесь, что вы знаете, какие пары проводов принадлежат одной и той же фазе. Неважно, какую фазу вы подключаете к какой паре контактов, или в каком направлении вы подключаете каждую фазу: поменять местами две фазы или поменять местами пару проводов в фазе просто заставит двигатель повернуться в другую сторону, что вы можно поправить в конфиге.g файл.
Будьте особенно осторожны при использовании шаговых двигателей со съемным кабелем! Двигатель Nema 17 со съемным кабелем обычно имеет 6-контактный разъем JST, но разные производители используют разные распиновки на этом разъеме. Всегда проверяйте фазы шагового двигателя (см. Следующий раздел) при использовании двигателей со съемными кабелями.
Настоятельно рекомендуется заземлить корпуса шаговых двигателей , особенно в принтерах с ременным приводом.В противном случае движение ремней вызывает накопление статического заряда, который в конечном итоге переходит в обмотки. Движение нити в экструдерах также может вызвать накопление статического заряда на приводном двигателе экструдера. Если моторы привинчены к металлической раме, достаточно заземления рамы.
Вот два способа разделить провода шагового двигателя на фазы:
- Используйте мультиметр. Между двумя проводами, принадлежащими одной и той же фазе, должно быть сопротивление в несколько Ом, а между проводами, принадлежащими разным фазам, не должно быть непрерывности.
- Когда провода двигателя ни к чему не подключены, вращайте шпиндель между пальцами. Замкните два провода вместе, затем снова закрутите шпиндель. Если вращать намного сложнее, чем раньше, эти два провода принадлежат одной и той же фазе. В противном случае попробуйте еще раз с другой парой проводов, закороченных вместе.
Если у вас два шаговых двигателя Z, подключите их к разъемам ZA и ZB. Эти разъемы подключены последовательно, что лучше, чем подключение их параллельно для большинства типов шаговых двигателей, используемых в 3D-принтерах.
Если у вас только один шаговый двигатель Z, подключите его к разъему ZA и вставьте две перемычки в разъем ZB. Платы Duet 2 обычно поставляются с уже установленными перемычками.
Если у вас есть два шаговых двигателя Z, то для типов двигателей, обычно используемых в RepRaps (т. Е. С номинальным током в диапазоне от 1,2 до 2,0 А), лучше соединять их последовательно, чем параллельно. Google «Последовательное подключение шаговых двигателей» для получения инструкций о том, как это сделать, например:
http: // www.Instructables.com/id/Wiring-Y …]
Некоторые новейшие комплекты китайских 3D-принтеров имеют слаботочные шаговые двигатели Z, которые вместо этого предназначены для параллельного подключения. Если двигатели имеют номинальный ток 1,0 А или ниже, подключите их параллельно.
Используйте команду M584 (см. Http: //reprap.org/wiki/G-code#M584: _Set _…), чтобы указать, какие драйверы используются для соответствующей оси. Вы должны использовать RepRapFirmware 1.14 или новее.
Дополнительные сведения см. На странице использования внешних драйверов
Если ваши двигатели имеют номинал выше примерно 2.8A, и вы используете Duet 2 (Wi-Fi или Ethernet), или выше примерно 2A, и вы используете Duet 2 Maestro, или устаревшие Duet 0.6 или 0.8.5, или если им требуется более высокое напряжение, чем может обеспечить Duet, тогда вы нужны внешние драйверы шагового двигателя. Обычно они имеют оптически изолированные входы step / dir / enable. Например, драйверы шагового двигателя с номинальным током до 5 А с использованием микросхемы шагового драйвера TB6600 широко доступны на eBay.
Если драйверам требуется не более 2 мА при 3 В на входах step, dir и enable, то вы можете управлять ими напрямую от разъема расширения Duet.Распиновку разъема расширения см. На схемах подключения Wi-Fi / Ethernet Duet 2. В противном случае вам следует использовать микросхемы смещения уровня от 3,3 В до 5 В, такие как 74HCT04, чтобы повысить уровень сигнала до 5 В и управлять ими. Для этой цели вы можете использовать Duet Expansion Breakout Board.
Чтобы переназначить двигатели X, Y или Z на внешние драйверы в RepRapFirmware 1.14 или новее, используйте команду M584 (см. Gcode M584). Сигналы включения на разъеме расширения по умолчанию активны на низком уровне, но вы можете изменить это с помощью команды M569 (см. Gcode M569).Вы также можете установить минимальную ширину шагового импульса в команде M569 (попробуйте 1us или 2us при использовании внешних драйверов) и настроить направление.
Перед выполнением этого шага временно разрешите перемещение оси без возврата в исходное положение, перейдя в консоль G-кода и введя: M564 S0 H0
Вернитесь на страницу управления машиной. В это время мы проверим работу наших шаговых двигателей.
Переместите каждый шаговый двигатель по отдельности на 1 мм в каждом направлении.
Обратите внимание, что шаговый двигатель не может быть перемещен до начала отсчета, если только команда M564 не используется для отмены этого безопасного значения по умолчанию.
3-проводное и 4-проводное подключение двигателя вентилятора конденсатора
Схема любезно предоставлена EmersonКак подключить двигатель вентилятора конденсатора с помощью 3-х против 4-х проводных проводов — частый вопрос новых технических специалистов. Джесси Гранбуа представил этот технический совет, чтобы упростить задачу. Спасибо, Джесси !.
Это краткое описание разницы между проводкой универсальных двигателей вентилятора конденсатора и того, почему коричневый + белый — это тот же провод, что и белый. Кажется, что это сбивает с толку даже опытных специалистов, и на самом деле это очень просто, как только вы его видите.Теперь имейте в виду, что цвета проводов ДЕЙСТВИТЕЛЬНО НИЧЕГО НЕ ОЗНАЧАЮТ, но на двигателях, заменяемых при обслуживании, цвета, как правило, одинаковы. Как всегда, обращайтесь к электрической схеме на конкретном двигателе, который вы используете.
Я представлю схему и объясню провода ниже.
Вот трехпроводной метод:
— Белый провод от двигателя вентилятора конденсатора к одной стороне питания на контакторе (T1) и прыгнул на одну сторону конденсатора вентилятора. Это питание переменного тока, а не двойной конденсатор, поэтому сторона клемм не имеет значения
— Черный провод от двигателя вентилятора конденсатора к другой стороне питания на контакторе (T2)
— Коричневый провод от двигателя вентилятора конденсатора к другой стороне конденсатора напротив перемычки.