
Как запустить и настроить частотный преобразователь — инструкция для чайников
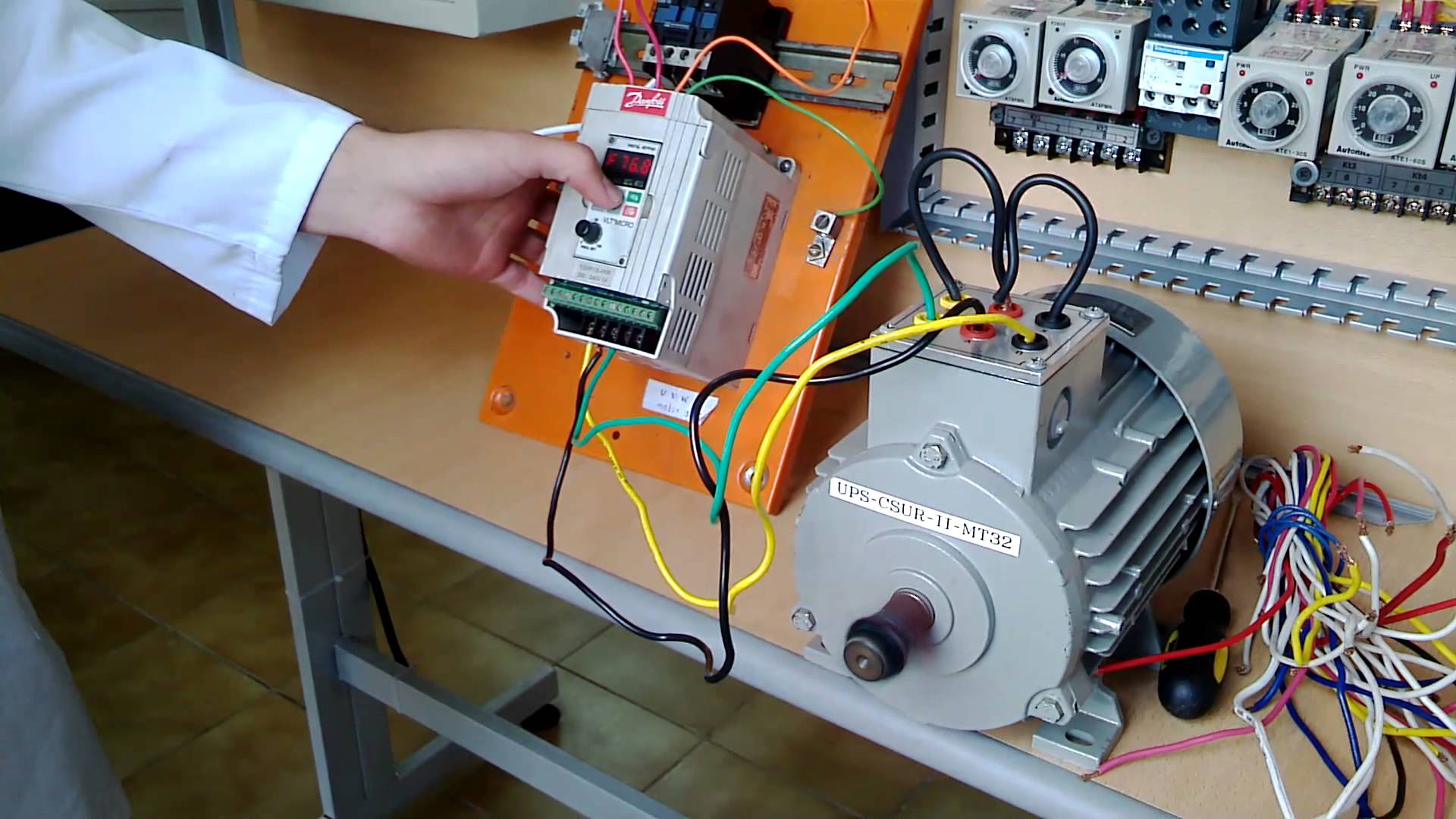
Преобразователь частоты — это силовой электронный блок, который является посредником между системой управления и электродвигателем. Он обеспечивает питание для двигателя, защищает его и задаёт необходимый режим работы — разгон, торможение или постоянное изменение скорости.
Для примера возьмем шлифовальный станок, который часто можно встретить в промышленном цеху или в столярной мастерской. Для качественной работы станка движение должно осуществляться в двух направлениях, скорость вращения ленты — меняться плавно, а аварийная кнопка мгновенно отключать питание. Без преобразователя частоты тут точно не обойтись.
Рис.1 Внешний вид шлифовального станка.
Подключение силовых цепей
Все провода, подключаемые к частотному преобразователю, можно разделить на 2 группы: силовые и контрольные. Рассмотрим подключение силовых.
Три провода сетевого питания 380 В, 50 Гц — клеммы R, S, T + провод заземления PE. Нейтраль частотному преобразователю не нужна. Даже если она у вас есть, подключать не нужно. А вот провода питания можно подключать в любом порядке. При необходимости чередование фаз можно изменить в программе частотника.
Три провода питания двигателя — клеммы U, V, W + провод заземления PE. На выходе напряжение может меняться от 0 до 380 В, а частота от 0 до 500 Гц. В этом и кроется смысл работы частотного преобразователя — он позволяет изменять скорость двигателя от нуля до номинального значения и даже выше, если это позволяет механика.
Рис.2 Подключение силовых цепей
Подключение цепей управления
 В документации производители чаще всего публикуют стандартную схему подключения с заводскими настройками, но для каждого механизма на деле нужна своя схема и индивидуальные настройки.
В документации производители чаще всего публикуют стандартную схему подключения с заводскими настройками, но для каждого механизма на деле нужна своя схема и индивидуальные настройки.
Рис.3 Подключение цепей управления
У нас задача не самая сложная. Для управления шлифовальной машиной достаточно кнопок «Пуск», «Стоп», переключателя «Вперед – Назад» и переменного резистора для изменения скорости вращения, его ещё называют потенциометром.
К дискретным входам DI подключаются сигналы, которые могут принимать одно из двух состояний — «вкл» и «выкл» или логический 0 и 1. В нашей схеме это кнопки «Пуск», «Стоп», переключатель направления и аварийный «грибок». Мы будем использовать кнопки без фиксации, которые уже установлены на станке.
К аналоговым входам AI подключаются сигналы с непрерывно меняющейся величиной тока 4…20 мА или напряжения 0…10 В. Это могут быть датчики, сигналы от контроллера или другого внешнего устройства. В нашем случае — это ручка потенциометра, которая обеспечивает плавную регулировку скорости.
Потенциометр или переменный резистор — это регулируемый делитель напряжения с тремя контактами.
Рис.4 Внешний вид потенциометра
На два крайних неподвижных контакта подаётся постоянное напряжение 10 В от частотного преобразователя, а средний подвижный контакт служит для снятия текущей величины напряжения, которая зависит от положения ручки. Если ручка повернута наполовину, значит и напряжение будет только половинное = 5 В. Преобразователь пересчитает напряжение в задание скорости и разгонит двигатель.
Рис.5 Подключение потенциометра
 Мощность может быть любой, даже 0,125 Вт достаточно. Идеально подойдёт XB5AD912R4K7 с сопротивлением 4,7 кОм.
Мощность может быть любой, даже 0,125 Вт достаточно. Идеально подойдёт XB5AD912R4K7 с сопротивлением 4,7 кОм.
На дискретные — DO и аналоговые выходы AO преобразователь выдает информацию о своем текущем состоянии, скорости или токе двигателя, достижении заданных значений или выходе за их пределы. В нашем случае выходы не используются, поэтому подключать нечего.
Настройка
Недостаточно просто подключить все провода к частотнику, его ещё нужно правильно настроить, чтобы механизм работал стабильно и долго. Для этого в частотном преобразователе несколько сотен параметров. Конечно, все настраивать не придётся, но вот основные — обязательно.
Настройка осуществляется с помощью клавиш на встроенной панели управления. С ними всё предельно просто.
Кнопка PRG отвечает за вход и выход из режима программирования. Кнопки вверх, вниз и вбок осуществляют навигацию внутри меню, а кнопка Enter — подтверждает выбор параметра или его значения.
MF.K — это дополнительная функциональная кнопка, которую можно настроить на необходимое действие, например переключение между местным и дистанционным управлением или смену направления вращения.
Зеленая и красная кнопки — это Пуск и Стоп, если управление осуществляется с панели.
Если запутались, не беда. Нужно несколько раз нажать на кнопку PRG, чтобы вернуться к исходному состоянию.
Рис.6 Внешний вид панели управления
А теперь к параметрированию
Во-первых, необходимо дать понять частотному преобразователю, какой двигатель к нему подключен. Для этого в параметры с F1-01 по F1-05 запишем значения с шильдика двигателя:
F1-01 = 1,5 кВт — номинальная мощность двигателя
F1-02 = 380 В — номинальное напряжение двигателя
F1-03 = 3,75 А — номинальный ток двигателя
F1-04 = 50 Гц — номинальная частота двигателя
F1-05 = 1400 об/мин — номинальная скорость двигателя
Рис. 7 Шильдик двигателя
7 Шильдик двигателя
Теперь, когда основные данные о двигателе есть, нужно провести автонастройку. Этот процесс нужен, чтобы частотный преобразователь ещё лучше адаптировался к работе с конкретным двигателем: вычислил сопротивление и индуктивность обмоток. Так управление будет точнее, а экономия энергии — больше.
Для запуска процедуры устанавливаем F1-37 = 1 — статическая автонастройка и нажимаем кнопку «Run» на панели управления. Через пару минут дисплей переходит в исходное состояние и частотник готов к работе.
Далее переведём управление на внешние кнопки и настроим его
В нашем случае подойдёт трёхпроводное управление, где кнопка «Стоп» осуществляет разрешение на работу, кнопка «Старт» — запуск станка, а переключатель выбирает направление вращения.
Рис.8 Схема трёхпроводного управления
Настроим эти параметры:
F0-02 = 1 — управление через клеммы управления
F0-03 = 2 — задание частоты с AI1 (потенциометр)
F4-00 = 1 — пуск
F4-01 = 2 — выбор направления движения
F4-02 = 3 — разрешение работы
F4-03 = 47 — аварийный останов
F4-11 = 3 — режим трёхпроводного управления
Теперь станок начинает оживать, реагирует на нажатие кнопок и вращение ручки скорости. Остаётся настроить время разгона, торможения и проверить на практике удобство использования. Наш частотный преобразователь настроен и готов к использованию!
Защита и безопасность
Преобразователь частоты — умное устройство. После настройки в работу включаются все защитные функции, которые в случае аварии сберегут и сам частотник, и двигатель, и механизм.
Например, при заклинивании: преобразователь вычислит, что ток двигателя намного выше номинального, который мы установили в параметре F1-03 ранее, выдаст ошибку «Перегрузка двигателя» и отключится. Двигатель не перегреется и не сгорит, а механика останется целой.
Двигатель не перегреется и не сгорит, а механика останется целой.
А если возникла угроза здоровью оператора или поломки оборудования — спасет аварийная кнопка «грибок». При её нажатии преобразователь в мгновение остановит станок и отключит питание. Никто не пострадает!
Вместо заключения
Ещё по теме
Настройка частотного преобразователя для регулирования давления в трубопроводе
Как настроить управление частотным преобразователем по сети Modbus
Инструкция по эксплуатации и чертежи MD310
Каталог с актуальными ценами
Подключение и настройка частотного преобразователя по всем правилам.
Решили продлить жизнь электродвигателя, но не знаете, как установить частотный преобразователь для трехфазного двигателя? Далее мы подробно разберемся в этом вопросе
Все более популярными становятся частотники в ситуациях, когда нужно запитать трехфазный двигатель. Это не крупные предприятия, а обычные домохозяйства с автономной системой водоснабжения или отопления. К тому же благодаря частотным преобразователям можно подключить электродвигатель с трехфазным питанием к однофазной сети, при этом, не теряя мощности движка.
Устанавливая частотный преобразователь для трехфазного двигателя, нужно соблюсти следующие требования:Отсутствие попадания прямых солнечных лучей.
Отсутствие вблизи легковоспламеняющихся жидкостей.

Отсутствие капель масла, пыли, металлической стружки.
Хорошая вентиляция.
Температура воздуха от -10 градусов до +45 °.
Не допускать попадание воды, влажность менее 90%.
Рядом с частотным преобразователем не должно быть деревянных конструкций и легковоспламеняющихся материалов.
Монтаж преобразователя должен осуществляться на твердой устойчивой поверхности.
НЕ устанавливать частотный преобразователь в зоне действия электромагнитных помех.
Устанавливать частотный преобразователь вертикально, для осуществления простоты движения охлажденного воздуха без отсутствия преград на его пути.

Во время работы, любой привод нагревается, в зависимости от мощности этот нагрев будет больше или меньше. Чтобы частотник нормально работал, нужно оставить минимум 10 см свободного пространства со всех сторон от него. Это позволит свободно циркулировать воздуху и наш частотный преобразователь не перегреется. Устанавливая ПЧ в шкафу, следите, чтобы поток воздуха от вентилятора проходил как можно ближе к частотнику.
От установки к электрическим соединениям.При монтаже в первую очередь подключают провод заземления. Сечение заземляющих кабелей должно соответствовать сечению кабелям питающей сети. Каждый провод заземляется отдельно.
Используйте экранированные кабели. Создайте защиту кабелей управления от электромагнитных помех.
Убедитесь в правильности подсоединения входных ( клеммы L 1, L 2, L3 для трехфазной и L, N для однофазной сети) и выходных силовых кабелей ( клеммы U, V ,W ).
Подключение к клемме РЕ преобразователя частоты выполняется проводом заземления.
Проконтролируйте, чтобы при команде «вперед» двигатель вращался вперед. Если двигатель вращается в обратную сторону необходимо поменять две любые шины между собой или откорректировать значение отвечающих за это функциональных параметров.
Не подключайте к выходным цепям фазосдвигающий конденсатор. Это может нарушить работу оборудования или привести к повреждению частотного преобразователя.
Не подключайте шины силового питания к выходным клеммам U, V, W. Это вызовет выход из строя частотного преобразователя.
Не допускается подключение к выходным цепям частотного преобразователя электромагнитный выключатель или магнитный контактор. При подключении нагрузки к частотному преобразователю в процессе его работы, скачок тока нагрузки вызовет срабатывание схемы защиты частотного преобразователя.
Пульт управления включается в состав частного преобразователя, устанавливается в удобном месте . Подключается пульт согласно схемы , которая находится в инструкции преобразователя.
Как настроить частотный преобразователь | Русэлт
Каждый частотный преобразователь настраивается в соответствии с инструкциями завода производителя. Это объясняется широкой номенклатурой изделий этого типа и разными задачами, которые приходится решать на практике.
Если используется управление асинхронным двигателем скалярного типа, то амплитуда сигнала и частота на выходе устройства устанавливается по определенной формуле. Такое решение проще, но оно не обеспечивает высокую точность. Для этого понадобится применить векторную систему управления. В преобразователях соответствующего типа выходной сигнал создается с использованием оперативных данных о положении ротора силового агрегата.
Другие виды оборудования комплектуют датчиками скорости вращения вала двигателя. Эти же данные вычисляют косвенными методиками, с применением регистрации изменений электрических параметров в обмотках.
Перечисленные сведения подтверждают необходимость использования правил, установленных производителем оборудования. Как пример ниже приведены основные пункты алгоритма, по которому настраивается промышленный частотный преобразователь:
- Выбирается вид управления: местного, дистанционного, с использованием показаний датчиков.
- Если предполагается использование отдельного экрана, устанавливают вывод на него нужной информации.
- Определяют конфигурацию подключения двигателя. На этом этапе задают возможность регулировки с применением обратной связи или без нее. В память блока управления заносят данные: величины крутящего момента, мощности потребителей, номинальных значениях частоты, напряжения, тока, скорости вращения ротора.
- Устанавливают максимальные допустимые величины напряжения и частоты, время увеличения скорости от нуля до номинала.
- В управляющую программу вносят данные о функциональном назначении отдельных клемм и особенностях сигналов. Отмечают действия оборудования, которые выполняются автоматически при исчезновении оперативной информации, поступающей с датчика.

В некоторых преобразователях есть пункт наличия/отсутствия фильтра в цепи питания двигателя. Пригодится для подключения разных видов нагрузок, если можно выбрать нормальное или инверсное изменение частоты при повышении уровня сигнала обратной связи. Полный список настроек приведен в технической документации на оборудовании.
Настройка преобразователя | АС Привод
Вопрос довольно обширный. Попробуем разбить его на несколько частей. Общая схема системы автоматического регулирования на базе нашего частотного преобразователя приведена в инструкции к версии 5-00 в описании параметра 3-28 сервисного меню. Система измеряет регулируемый параметр с помощью датчика и управляет двигателем таким образом, чтобы поддерживать величину регулируемого параметра равным заданному значению (заданию или уставке, как говорят наладчики). Уставка может быть задана в виде управляющего напряжения на аналоговом входе (например поступать с потенциометра, который управляется оператором), а может непосредственно вводиться в частотник в цифровом виде с передней панели или пульта. Она может быть постоянной (в таком случае говорят об автоматической стабилизации заданного параметра), а может меняться в процессе работы (тогда это называется системой автоматического управления). Для получения минимальной погрешности и времени установления регулируемого параметра такие системы обычно формируют выходной сигнал из трех составляющих, пропорциональной (П), интегральной (И) и дифференциальной (Д), поэтому и называются ПИД регуляторами. О влиянии каждой из этих составляющих мы поговорим позже.
Итак, рассмотрим довольно распространенную задачу. Требуется организовать систему водоснабжения частного дома с поддержанием постоянного давления на уровне 3bar. Имеется скважина, в которой установлен погружной трехфазный насос. Для измерения давления можно применить стандартный датчик на максимальное давление 10bar с токовым выходом 4-20ma и двухпроводной схемой подключения. Поскольку датчик потребляет небольшой ток, его можно запитать непосредственно с выхода +24В частотного преобразователя, сэкономив таким образом на дополнительном блоке питания для датчика. Итоговая схема показана на рисунке. После монтажа оборудования в первую очередь надо настроить правильный прием информации с датчика давления и убедиться в исправной работе всех узлов, управляя мотором в ручном режиме.
Для получения минимальной погрешности и времени установления регулируемого параметра такие системы обычно формируют выходной сигнал из трех составляющих, пропорциональной (П), интегральной (И) и дифференциальной (Д), поэтому и называются ПИД регуляторами. О влиянии каждой из этих составляющих мы поговорим позже.
Итак, рассмотрим довольно распространенную задачу. Требуется организовать систему водоснабжения частного дома с поддержанием постоянного давления на уровне 3bar. Имеется скважина, в которой установлен погружной трехфазный насос. Для измерения давления можно применить стандартный датчик на максимальное давление 10bar с токовым выходом 4-20ma и двухпроводной схемой подключения. Поскольку датчик потребляет небольшой ток, его можно запитать непосредственно с выхода +24В частотного преобразователя, сэкономив таким образом на дополнительном блоке питания для датчика. Итоговая схема показана на рисунке. После монтажа оборудования в первую очередь надо настроить правильный прием информации с датчика давления и убедиться в исправной работе всех узлов, управляя мотором в ручном режиме. Для этого:
1. В п. 3-11 сервисного меню установить 2 (Аналоговый вход 2 работает в режиме токовой петли с прямой зависимостью).
2. Переключить DIP переключатель №2 на клеммной плате частотника в положение ON.
3. В п. 3-09 сервисного меню установить 4.00 (Нулю датчика соответствует ток 4mА).
4. В п. 3-10 сервисного меню установить 20.00 (100% шкалы датчика соответствует ток 20mА).
5. В п. 7-05 сервисного меню установить 4 (Пользовательский параметр на дисплее во время работы будет отображать показания датчика давления в миллиамперах).
6. Выйти из сервисного меню. Нажать кнопку «i» один раз. На дисплее должны отображаться показания датчика давления. Включить насос кнопкой «ROTATION» и накачать систему до 3bar, контролируя давление по механическому манометру, а затем выключить насос кнопкой «STOP». Убедиться, что показания на дисплее частотника составляют 8.
 8mА, что соответствует 3bar( (((20mА-4mА)/10bar)*3bar)+4mА=8.8mА ), то есть показания датчика совпадают с показаниями механического манометра. Небольшие погрешности можно устранить в дальнейшем путем более точной калибровки.
8mА, что соответствует 3bar( (((20mА-4mА)/10bar)*3bar)+4mА=8.8mА ), то есть показания датчика совпадают с показаниями механического манометра. Небольшие погрешности можно устранить в дальнейшем путем более точной калибровки.7. Затем настроить минимально возможное время разгона и торможения привода обычным образом (п. 1-03, 1-04). При необходимости применить тормозной резистор или торможение постоянным током (п. 1-15, 1-17, 1-18, 1-06).
8. В зависимости от получившейся динамики системы (реального времени накачки до рабочего давления) выбрать период работы ПИД регулятора в п. 3-28. В большинстве случаев можно установить минимальное значение 1мс для лучшего быстродействия. Увеличивать это значение необходимо только для очень медленных процессов, например регулирования температуры массивных предметов. Это позволит избежать постоянного насыщения интегратора при длительном рассогласовании.
9. Установить для начала пропорциональный коэффициент регулятора около 500 (п. 3-29).
10. Интегральный и дифференциальный коэффициенты оставить нулевыми (п. 3-30 и 3-31).
11. Включить управление частотой от ПИД регулятора, задание на требуемое давление вводится к кнопок передней панели (в п. 3-02 поставить 7).
12. В п. 7-05 сервисного меню установить 5. В этом случае пользовательский параметр на дисплее во время работы будет показывать сигнал с датчика давления в процентах от полной шкалы, а не в миллиамперах, что более удобно для восприятия. Требуемые 3Bar будут соответствовать показаниям 30%. Внимание! После применения данных настроек при выходе из сервисного меню ПИД регулятор активируется немедленно. В случае большого рассогласования возможен выход на высокие обороты, колебания в системе и т. д. При этом быстро остановить привод в опасной ситуации можно только выключателем «СТОП», который подключен к клеммам внешнего управления. Кнопка «STOP» на передней панели частотника работать не будет!
13. Выйти из сервисного меню. Вместо привычной частоты на дисплее будет отображаться текущее задание ПИД регулятору в процентах.
 Кнопками «+» и «-» выставить на дисплее требуемое задание 30.0%, что соответствует необходимым 3bar. Нажать кнопку «i» один раз для отображения на дисплее текущих показаний датчика давления.
Наблюдать, как нарастает давление при работе насоса, и что происходит при его приближении к заданному значению (30%).
Возможны разные варианты:
а) Давление нарастает медленно или не нарастает вовсе. Насос выключается задолго до того, как требуемое давление достигнуто. Если открыть кран и снизить давление, насос снова включается, но опять выключается слишком рано.
б) Давление быстро возрастает выше необходимого, насос выключается слишком поздно.
В случае а) необходимо увеличить пропорциональную составляющую в п. 3-29, а в случае б) наоборот, уменьшить.
Следует добиться, чтобы при отсутствии расхода воды превышение давления над заданным после остановки насоса было небольшим, несколько процентов.
Затем постепенно добавлять дифференциальную составляющую, добиваясь минимального отклонения величины давления от заданного, в том числе и при наличии расхода воды. Если возникают колебания давления (насос работает рывками), следует уменьшать пропорциональную составляющую и увеличивать дифференциальную. Необходимо добиться, чтобы при наборе давления и отсутствии расхода воды насос останавливался немного ниже заданной точки, а при наличии расхода не возникали значительные колебания давления.
Кнопками «+» и «-» выставить на дисплее требуемое задание 30.0%, что соответствует необходимым 3bar. Нажать кнопку «i» один раз для отображения на дисплее текущих показаний датчика давления.
Наблюдать, как нарастает давление при работе насоса, и что происходит при его приближении к заданному значению (30%).
Возможны разные варианты:
а) Давление нарастает медленно или не нарастает вовсе. Насос выключается задолго до того, как требуемое давление достигнуто. Если открыть кран и снизить давление, насос снова включается, но опять выключается слишком рано.
б) Давление быстро возрастает выше необходимого, насос выключается слишком поздно.
В случае а) необходимо увеличить пропорциональную составляющую в п. 3-29, а в случае б) наоборот, уменьшить.
Следует добиться, чтобы при отсутствии расхода воды превышение давления над заданным после остановки насоса было небольшим, несколько процентов.
Затем постепенно добавлять дифференциальную составляющую, добиваясь минимального отклонения величины давления от заданного, в том числе и при наличии расхода воды. Если возникают колебания давления (насос работает рывками), следует уменьшать пропорциональную составляющую и увеличивать дифференциальную. Необходимо добиться, чтобы при наборе давления и отсутствии расхода воды насос останавливался немного ниже заданной точки, а при наличии расхода не возникали значительные колебания давления.14. Добавляя интегральную составляющую, уменьшаем отклонение давления при наличии расхода воды до минимально возможного значения. При правильной настройке давление должно незначительно колебаться вокруг заданной точки, а резкие изменения при открытии расходных вентилей должны быстро компенсироваться увеличением оборотов насоса. В конце еще раз проверяем отсутствие значительного перерегулирования при накачке давления от нуля до заданного.
15. При такой настройке насос будет включаться на малые обороты даже при незначительном уменьшении давления в системе против заданного. Если необходимо уменьшить количество включений насоса в час, можно задать определенную зону нечувствительности в п.
 3-33 в процентах. В этом случае при малых рассогласованиях насос останется выключенным, и включится лишь тогда, когда рассогласование превысит заданный порог. Естественно, точность поддержания давления при этом снизится.
3-33 в процентах. В этом случае при малых рассогласованиях насос останется выключенным, и включится лишь тогда, когда рассогласование превысит заданный порог. Естественно, точность поддержания давления при этом снизится.16. При необходимости можно отключить звуковой сигнализатор (бузер), чтобы не было звукового сигнала при каждом пуске мотора. Для этого в п.7-08 сервисного меню установить 1.
Вопросы и ответы
Подключение датчика АДМ-100 для ER-T:
клемму «+» АДМ соедините с клеммой «Р24» ПЧ;
клемму «-» АДМ соедините с клеммой «FI» ПЧ.
Настройки для ER-T:
b.02=4 //Способ задания частоты — ПИД-регулятор
b.04=60.0 //Время разгона
b.05=60.0 //Время торможения
С.01=1 //уставка ПИД по параметру С.05
С.02=1 //ОС ПИД по входу FI
С.04=16.0 //предел измерения датчика АДМ-100-1,6 в кгс/см2
С.05=14.0 //уставка в кгс/см2
С.09 и С.10 подлежат корректировке при ПНР для обеспечения качества регулирования давления
Перед настройкой ПИД-регулятора рекомендуется выполнить пуск в ручном режиме. При открытом расходе насоса проверьте его работу, вручную задавая частоту от 15 до 50 Гц с панели ПЧ. Если насос не выходит на макс. частоту 50Гц, выберите тип модуляции b.10=OPt, выберите d.01 равным ном. току ПЧ и увеличьте номинальное напряжение d.02 до 400…420В.
Подключение датчика АДМ-100 для E-9:
клемму «+» АДМ соедините с клеммой «Р24» ПЧ;
клемму «-» АДМ соедините с клеммой «IFA» ПЧ;
установите перемычку между клеммами «GND» и «COM» ПЧ.
Настройки для E-9:
F194=3, F193=1, F003=0, F004=2, F110=0, F111=4, F113=2
F114=пределу измерения АДМ-100 (для АДМ-100.3-1,6 установите F114=16,0 кгс/см2 )
F116=70,0 (к-т пропорциональности, требует подстройки для улучшения качества регулирования)
F117=8,0 (время интегрирования, требует подстройки для улучшения качества регулирования)
F119=0, F120=100
Задание давления производится потенциометром на панели управления ПЧ. Кнопками SET и ESC переключаются отображаемые параметры на верхнем и нижнем табло панели соответственно. При мигающем индикаторе MPa отображается заданное давление, при горящем постоянно индикаторе MPa отображается давление, полученное от датчика.
Кнопками SET и ESC переключаются отображаемые параметры на верхнем и нижнем табло панели соответственно. При мигающем индикаторе MPa отображается заданное давление, при горящем постоянно индикаторе MPa отображается давление, полученное от датчика.
При длине кабеля более 30 м, например, в случае с погружным насосом, на выходе ПЧ необходимо установить моторный дроссель серии EA-OC с номинальным током соответственно току двигателя.
Как настроить частотный преобразователь под нагрузочные характеристики?
4.1 Настройка преобразователя частоты под характеристику нагрузочного момента
Минимальная частота, при которой напряжение двигателя достигает максимальной величины, называется базовой частотой. Ниже представлен графиг отображающий зависимость напряжения двигателя от величины базовой частоты.
Рис. 4 Зависимость напряжения двигателя от базовой частоты
Максимальная частота — это наибольшая возможная частота (50, 60, 120 или 400 Гц), которая может быть на выходе преобразователя частоты.
Оптимальная характеристика отношения напряжения к частоте (U/f) может быть выбрана в соответствии с характеристикой момента нагрузки [2].
Нагрузочная характеристика механизма с постоянным моментом сопротивления
Такую нагрузочную характеристику имеют различные транспортеры, шнеки, каландры, т.е. при изменении частоты вращения двигателя величина момента сопротивления механизма остается постоянной, равной номинальному значению.
Нагрузочная характеристика механизма с изменяющимся моментом сопротивления
Нагрузочная характеристика механизма с изменяющимся моментом сопротивления характерна для центробежных вентиляторов и насосов. Изменение момента сопротивления механизма пропорционально квадрату частоты вращения вала двигателя.
а) б)
Рис. 5 Зависимость напряжения от частоты на выходе преобразователя при разном характере нагрузки
а) — нагрузка с постоянным моментом сопротивления;
б) — нагрузка с изменяемым моментом сопротивления.
Кривые ускорения и замедления двигателя
Время, за которое достигается максимальная частота вращения двигателя при управлении двигателем по закону соотношения U/f, называется временем ускорения. Время от максимальной частоты вращения до остановки двигателя называется временем замедления.
Ускорение и замедление может осуществляться как по линейной зависимости, так и по S и U-образным кривым в зависимости от характера нагрузки.
Рис. 6 Типы ускорений и замедлений двигателя
L — линейное, S — образное и U — образное ускорение и замедление
Источник: ведомственный руководящий документ ВРД 39-1.10-052-2001
Другие публикации:
Что такое нагрузочные характеристики?
| < Предыдущая | Следующая > |
|---|
Lovato Electric | Energy and Automation
Choose your country Выберите страну…Глобальный сайт—————-CanadaChinaCroatiaCzech RepublicGermanyFranceItalyPolandRomaniaSpainSwitzerlandTurkeyUnited Arab EmiratesUnited KingdomUnited States—————-AfghanistanAlbaniaAlgeriaAmerican SamoaAndorraAngolaAnguillaAntarcticaAntigua And BarbudaArgentinaArmeniaArubaAustraliaAustriaAzerbaijanBahamasBahrainBangladeshBarbadosBelarusBelgiumBelizeBeninBermudaBhutanBoliviaBosnia And HerzegovinaBotswanaBouvet IslandBrazilBritish Indian Ocean TerritoryBrunei DarussalamBulgariaBurkina FasoBurundiCambodiaCameroonCanadaCape VerdeCayman IslandsCentral African RepublicChadChileChinaChristmas IslandCocos (keeling) IslandsColombiaComorosCongoCongo, The Democratic Republic Of TheCook IslandsCosta RicaCote D’ivoireCroatiaCubaCyprusCzech RepublicDenmarkDjiboutiDominicaDominican RepublicEast TimorEcuadorEgyptEl SalvadorEquatorial GuineaEritreaEstoniaEthiopiaFalkland Islands (malvinas)Faroe IslandsFijiFinlandFranceFrench GuianaFrench PolynesiaFrench Southern TerritoriesGabonGambiaGeorgiaGermanyGhanaGibraltarGreeceGreenlandGrenadaGuadeloupeGuamGuatemalaGuineaGuinea-bissauGuyanaHaitiHeard Island And Mcdonald IslandsHoly See (vatican City State)HondurasHong KongHungaryIcelandIndiaIndonesiaInternationalIran, Islamic Republic OfIraqIrelandIsraelItalyJamaicaJapanJordanKazakstanKenyaKiribatiKorea, Democratic People’s Republic OfKorea, Republic OfKosovoKuwaitKyrgyzstanLao People’s Democratic RepublicLatviaLebanonLesothoLiberiaLibyan Arab JamahiriyaLiechtensteinLithuaniaLuxembourgMacauMacedonia, The Former Yugoslav Republic OfMadagascarMalawiMalaysiaMaldivesMaliMaltaMarshall IslandsMartiniqueMauritaniaMauritiusMayotteMexicoMicronesia, Federated States OfMoldova, Republic OfMonacoMongoliaMontenegroMontserratMoroccoMozambiqueMyanmarNamibiaNauruNepalNetherlandsNetherlands AntillesNew CaledoniaNew ZealandNicaraguaNigerNigeriaNiueNorfolk IslandNorthern Mariana IslandsNorwayOmanPakistanPalauPalestinian Territory, OccupiedPanamaPapua New GuineaParaguayPeruPhilippinesPitcairnPolandPortugalPuerto RicoQatarReunionRomaniaRussian FederationRwandaSaint HelenaSaint Kitts And NevisSaint LuciaSaint Pierre And MiquelonSaint Vincent And The GrenadinesSamoaSan MarinoSao Tome And PrincipeSaudi ArabiaSenegalSerbiaSeychellesSierra LeoneSingaporeSlovakiaSloveniaSolomon IslandsSomaliaSouth AfricaSouth Georgia And The South Sandwich IslandsSouth SudanSpainSri LankaSudanSurinameSvalbard And Jan MayenSwazilandSwedenSwitzerlandSyrian Arab RepublicTaiwan, Province Of ChinaTajikistanTanzania, United Republic OfThailandTogoTokelauTongaTrinidad And TobagoTunisiaTurkeyTurkmenistanTurks And Caicos IslandsTuvaluUgandaUkraineUnited Arab EmiratesUnited KingdomUnited StatesUnited States Minor Outlying IslandsUruguayUzbekistanVanuatuVenezuelaViet NamVirgin Islands, BritishVirgin Islands, U. s.Wallis And FutunaWestern SaharaYemenZambiaZimbabwe
s.Wallis And FutunaWestern SaharaYemenZambiaZimbabwe
LOVATO Electric S.p.A. Via Don E. Mazza, 12 — 24020 Gorle (BG) ITALY Cap. Soc. Vers. Euro 3.200.000 Cod. Fisc. e Part. IVA n. 01921300164 ID. NO. IT 01921300164
База знаний о преобразователе частоты— Мотор-генератор
Обзор двигателя-генератора
В двигателях-генераторах(MG Sets) используются электромеханические средства преобразования напряжения и частоты. Установки MG состоят из двигателя переменного тока, который работает непосредственно от линии электропередачи 60 Гц на вашем предприятии, его вал соединен с валом синхронного генератора. Генератор выдает новые уровни частоты и напряжения.
Стабилизация выходного напряжения генератора
Выходное напряжение генератора регулируется твердотельным регулятором напряжения, который непрерывно измеряет напряжение на выходных клеммах генератора и выполняет необходимую регулировку для поддержания выходного напряжения в пределах технических характеристик.Типичное регулирование выходного напряжения составляет +/- 1% или лучше в условиях установившейся нагрузки от 0% до 100%.
Выходное напряжение генератораможет быть отрегулировано пользователем в диапазоне приблизительно +/- 8% от номинального выходного напряжения (более широкий диапазон на некоторых моделях), и это облегчается с помощью регулятора Volts Adjust, расположенного на панели управления оператора.
Регулировка выходной частоты генератора
Выходная частота синхронного генератора прямо пропорциональна частоте вращения вала генератора.В зависимости от типа двигателя, приводящего в движение вал генератора, выходная частота может оставаться точной или иметь допуск регулирования до +/- 2,5% от номинальной номинальной выходной частоты в условиях нагрузки от 0% до 100%.
Прецизионная работа синхронного двигателя
MG Set, работающий от электросети вашего объекта 60 Гц с номинальной выходной частотой 50 Гц и использующий синхронный двигатель переменного тока, будет обеспечивать точные 50,0 Гц при любых условиях выходной нагрузки от 0% до 100% номинальной нагрузки. Такое точное регулирование частоты возможно благодаря присущей синхронному двигателю способности поддерживать одно и то же число оборотов в минуту при любой величине нагрузки, вплоть до 100% номинальной нагрузки.
Такое точное регулирование частоты возможно благодаря присущей синхронному двигателю способности поддерживать одно и то же число оборотов в минуту при любой величине нагрузки, вплоть до 100% номинальной нагрузки.
Работа асинхронного двигателя
В некоторых наборах MG используются стандартные асинхронные двигатели переменного тока (асинхронные двигатели) для привода вала синхронного генератора. Рабочие характеристики асинхронного двигателя переменного тока позволяют уменьшать частоту вращения генератора по мере увеличения нагрузки на вал. С комплектом MG, работающим от электросети вашего предприятия с частотой 60 Гц и номинальной выходной частотой 50 Гц, выходная частота не будет точной и обычно будет в диапазоне от 50.От 5 Гц или выше до 49,5 Гц или ниже в зависимости от конструкции MG, уровня входного напряжения и количества нагрузки, подключенной к выходу генератора.
Влияние нестабильной частоты на нагрузку
В большинстве случаев нестабильная частота нежелательна. Например, в тестовой среде использование преобразователя частоты с нестабильной частотой может привести к сбою в работе тестируемого устройства (UUT) или к ошибочным данным тестирования. При простом управлении оборудованием 50 Гц на нестабильной частоте может возникнуть колебательное или резонансное взаимодействие между нагрузкой и MG Set, что может привести к неправильной работе оборудования в нагрузке.
Практически все комплекты MG, которые можно арендовать в нашем парке, включают в себя настоящий синхронный двигатель переменного тока, который обеспечивает стабильную частоту источника питания для нагрузки. Если комплект MG, включающий асинхронный двигатель переменного тока, предлагается любому арендатору AP&C, наш инженер-разработчик поможет обеспечить его совместимость с нагрузкой клиента.
Влияние нагрузочного оборудования на выходную мощность комплекта MG
Типы нагрузок, подключенных к выходу преобразователя частоты, играют важную роль при выборе преобразователя частоты.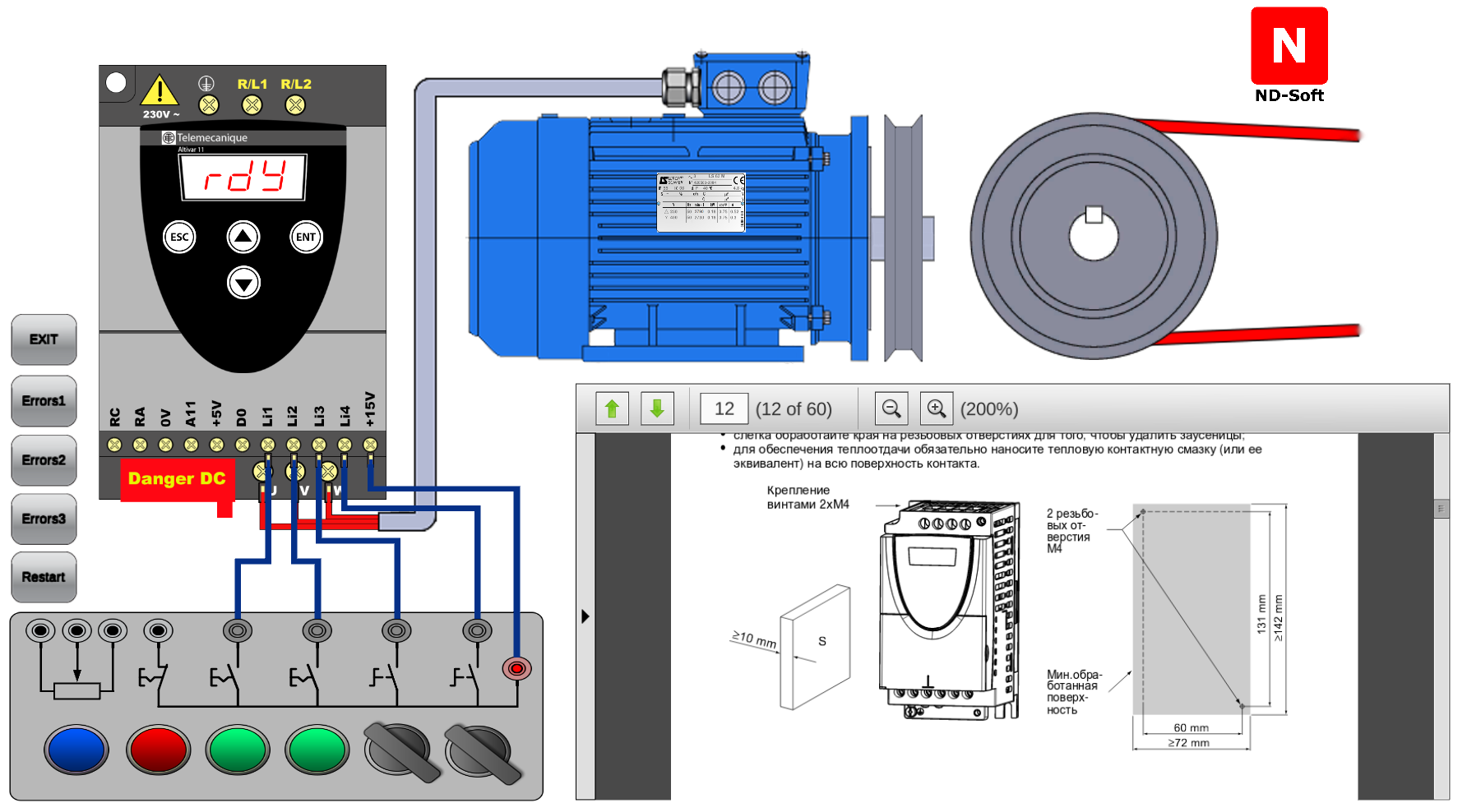 Каждый тип нагрузочного оборудования или цепи демонстрирует характеристики, которые необходимо учитывать, чтобы гарантировать правильную работу оборудования или приемлемые результаты. Ниже приведены лишь некоторые из вариантов нагрузки, которые могут повлиять на производительность выхода преобразователя частоты.
Каждый тип нагрузочного оборудования или цепи демонстрирует характеристики, которые необходимо учитывать, чтобы гарантировать правильную работу оборудования или приемлемые результаты. Ниже приведены лишь некоторые из вариантов нагрузки, которые могут повлиять на производительность выхода преобразователя частоты.
Влияние пусковых токовых нагрузок
Определенные типы нагрузочного оборудования или цепей потребляют значительно больший ток при первом включении, чем во время работы. Нагрузки, содержащие двигатели, трансформаторы, электронные источники питания или преобразователи с входными конденсаторами, имеют характеристику потребления мгновенного пикового тока в течение первых 3-5 циклов, в 5-60 раз или больше, чем их номинальный ток полной нагрузки.
Когда к выходу MG подключена нагрузка пускового тока, уровень напряжения генератора на мгновение упадет пропорционально пиковому току нагрузки и интервалу. Это мгновенное напряжение может быть на 30% или более ниже номинального выходного напряжения. По истечении периода времени пускового тока регулятор напряжения будет регулировать выходное напряжение в пределах номинальных характеристик регулирования напряжения, обычно +/- 1% или меньше. Промышленность приняла 30% -ное падение максимально допустимого снижения напряжения, которое должно произойти, чтобы обеспечить нормальную работу большинства нагрузочного оборудования.Максимально допустимое падение напряжения 10% рекомендуется для более чувствительного нагрузочного оборудования, такого как некоторые медицинские или научные устройства. Наши опытные инженеры по применению помогут определить оборудование в вашей нагрузке, которое считается нагрузкой пускового тока.
Влияние однофазной нагрузки на трехфазный выход MG
Для использования с однофазными нагрузками рекомендуется использовать однофазный преобразователь выходной частоты. Однако иногда нагрузочное оборудование или проверяемое оборудование состоит из однофазных и трехфазных компонентов.
Когда однофазные нагрузки подключены к трехфазному выходу преобразователя частоты MG, они должны распределяться между тремя фазами как можно более равномерно. Помимо возможности перегрева генератора и оборудования трехфазной нагрузки, может возникнуть несимметрия напряжения.
Когда однофазная нагрузка подключена к трехфазному выходу MG Set, уровень напряжения на нагруженной фазе будет снижаться, а уровень напряжения на ненагруженных фазах будет увеличиваться.По мере увеличения дисбаланса тока нагрузки на каждой фазе уровни напряжения могут становиться преувеличенными, так что выход MG Set отключается схемами безопасности, или оборудование нагрузки или проверяемое оборудование срабатывает неправильно или выходит из строя. Превышение примерно 2% несимметрии напряжения может вызвать перегрев генератора или трехфазного нагрузочного оборудования и возможный выход из строя.
Влияние нелинейных нагрузок на выход MG Set
Нелинейные нагрузки — это нагрузки или проверяемое оборудование, которые включают в себя электронные силовые устройства, такие как диоды, тиристоры или силовые транзисторы.Эти устройства используются в таком оборудовании, как преобразователи частоты, источники бесперебойного питания, источники питания переменного / постоянного тока и инверторы.
Нелинейные нагрузки вызывают искажение синусоидального сигнала на выходе преобразователя частоты MG Set, а также дополнительный нагрев обмоток генератора. Если нелинейные нагрузки создают чрезмерное искажение синусоидальной волны на данном выходе MG Set, выходное напряжение может стать нестабильным, что приведет к сбою в работе нагрузочного оборудования или выхода MG Set из строя его цепями безопасности.
Физические характеристики мотор-генераторной установки
Мотор-генераторные установки многие считают большими, тяжелыми и прочными по сравнению с их электронными аналогами с преобразователями частоты. Комплекты MG подходят для работы в таких средах, как защита от непогоды (не обязательно в помещении), или в помещениях, содержащих другое электрическое оборудование, такое как силовые трансформаторы и воздушные компрессоры.
Звуковой шум, создаваемый наборами MG, обычно зависит от номинальной мощности в кВА и обычно колеблется от 70 дБА до 90 дБА при измерении на расстоянии 3 фута от оборудования.
Именно по указанным выше основным причинам при определении размеров и выборе преобразователя частоты на базе двигателя-генератора для данной нагрузки следует проконсультироваться с нашими инженерами по применению.
Заявление об отказе от ответственности: Вся описательная информация представлена в виде общих неспецифических характеристик оборудования и предлагается нашим арендаторам лучше понять преобразователи частоты и их применение. Читателю следует связаться с инженерами по приложениям AP&C для получения подробной или конкретной технической информации о преобразователях частоты и их использовании.
База знаний — Электронные / статические преобразователи
ГГц
Преобразователь частотыГГц — отличное решение для преобразования 50 Гц в 60 Гц в разных странах, также может преобразовывать 60 Гц в 50 Гц, помимо регулировки частоты, выходное напряжение можно изменять от 0-300 вольт для однофазного источника питания, 0-520 вольт для трехфазного питания. В этой статье показаны основные принципы работы статического преобразователя частоты GoHz. Вы можете легко настроить преобразователь, следуя этому руководству.
Панель управления однофазного преобразователя частоты
ГГц имеет 4 основных окна отображения: напряжение (В), частота (Гц), ток (А), мощность (Вт).
(1) «ЧАСТОТА» (Гц) отображает выходную частоту;
(2) «НАПРЯЖЕНИЕ» (В) отображает выходное напряжение;
(3) «ВЫХОДНОЙ АМПЕР» (A) отображает выходной ток;
(4) «ВЫХОДНАЯ ВАТТА» (Вт) отображает выходную мощность.
Этапы работы статического преобразователя частоты ГГц
1.Откройте переднюю дверцу преобразователя частоты GoHz, вы увидите входные и выходные клеммы машины, подключив ее в соответствии с табличками на клеммах.
2. Выключите выходной выключатель.
3. Включите входной переключатель.
4. Нажать кнопку пуска — на панели зеленая «ВКЛ».
5. Регулировка напряжения : Выходное напряжение регулируется от 0 до 300 В (однофазное) и от 0 до 520 В (трехфазное). «VOLTAGE» на панели отображает выходное напряжение, отсчет слева направо, ручка с надписью «VOLTAGE ADJ» используется для регулировки напряжения, желтая кнопка «LOW» на панели соответствует уровню высокого-низкого напряжения (0- 150 В — низкосортный, 0-300В — высший) переключатель.Если требуемое напряжение нагрузки выше 150 В, нажмите кнопку «LOW», увеличьте напряжение, регулируя ручку «VOLTAGE ADJ» по часовой стрелке, уменьшите напряжение против часовой стрелки; Если требуемое напряжение нагрузки ниже 150 В, нажмите желтую кнопку «НИЗКИЙ».
Для трехфазных преобразователей напряжение низкого уровня составляет 0–260 В, напряжение высокого уровня составляет 0–520 В.
6. Установка частоты : Измените частоту переключателем «FREQUENCY SET». Переключатель настройки частоты имеет 4 значения, слева направо — сотни, десятки, единицы и десятичные разряды.PS: входная частота может составлять 50 Гц или 60 Гц, выходная частота регулируется от 40 Гц до 120 Гц (обычно) или даже 400 Гц (укажите это при заказе, если ваше оборудование работает на частоте 400 Гц, в принципе преобразователь может работать с максимальной частотой 499,9 Гц).
7. Проверьте параметры, отображаемые на панели преобразователя частоты: частота и напряжение соответствуют нагрузкам. Включите выходной переключатель, преобразователь частоты включен для работы, «ВЫХОДНОЙ АМПЕР» на панели — это выходной ток, «ВЫХОДНАЯ ВАТТА» — выходная мощность, панели выходного тока и панель питания будут отображать фактический ток и активный ток. мощность.
8. Красная кнопка «ВЫКЛ / СБРОС» на панели — это кнопка «Выкл.» И «Сброс». В случае аварийных сигналов преобразователя частоты нажмите эту кнопку для сброса или выключения.
Следующие две точки относятся только к трехфазным преобразователям частоты
Панель управления трехфазного преобразователя частоты
9. Кнопка «ВЫХОДНОЙ ТОК» на панели представляет собой переключатель трехфазного дисплея: переключение на «U», выходная частота, напряжение, ток, мощность на панели — фактические выходные параметры «U»; При переключении на «V» частота, напряжение, ток, мощность равны «V» фактическим выходным параметрам; При переключении на «Вт» частота, напряжение, ток, мощность равны фактическим выходным параметрам «Вт».
10. Откройте переднюю дверцу трехфазного преобразователя частоты, вы увидите входные и выходные клеммы преобразователя, в правом верхнем углу есть метки индикации фазного и линейного напряжения, а также его тумблер. Переключив его на «фазовое напряжение», отобразите одно из «U-N / V-N / W-N» и фазное напряжение на передней панели, отрегулировав переключатель трехфазного дисплея; При переключении его на «линейное напряжение» и трехфазном переключателе на «V» на передней панели отображается напряжение V-W, т. Е.линейное напряжение. (Примечание. При переключении на сетевое напряжение и трехфазном переключателе в положении «W» напряжение не отображается.)
Статья по теме: Калибровка преобразователя частоты GoHz
Покупка статического преобразователя частоты в Интернете, 1 кВА, 10 кВА, 100 кВА …
Как это работает с минимальными усилиями
Здесь мы рассмотрим особенности работы частотно-регулируемых приводов (ЧРП) и способы упрощения их установки и настройки.
Боб Бонцар, Яскава Америка | Услуги по техническому обучению
Преобразователи частотыили частотно-регулируемые приводы, которые в данном контексте мы называем просто приводами, работают в самых разных отраслях промышленности.Они часто остаются за кадром.
Тем не менее, приводы придают экономичный и надежный уровень сложности двигателям, поэтому заслуживают внимательного рассмотрения и установки.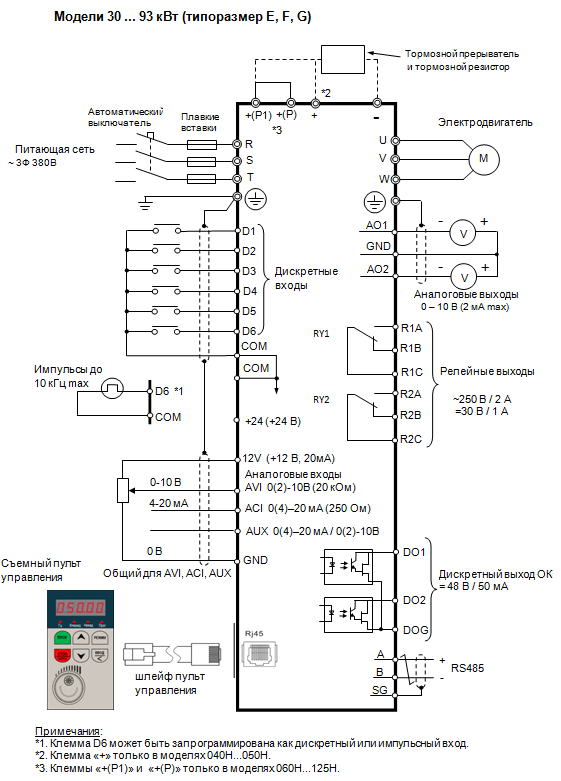 Перед первоначальным запуском привода и в некоторых эксплуатационных ситуациях для производителей комплектного оборудования и других инженеров-проектировщиков предлагается шесть задач.
Перед первоначальным запуском привода и в некоторых эксплуатационных ситуациях для производителей комплектного оборудования и других инженеров-проектировщиков предлагается шесть задач.
Привод — это электрическое и электронное устройство, которое регулирует скорость двигателя, изменяя его частоту.Приложения, в которых работают приводы, сильно различаются. С некоторыми изменениями в проводке и программировании назначение привода может полностью измениться.
После того, как установлено, что конкретный диск подходит для используемого приложения, конечным пользователям необходимо указать лишь несколько деталей, чтобы этот диск заработал.Способ, которым привод изменяет частоту двигателя, эффективно расширяет полезность этого двигателя, поскольку двигатели с частотно-регулируемым приводом освобождаются от ограничивающей настройки, состоящей только в том, чтобы быть включенным или выключенным.Привод позволяет двигателю быстро или медленно ускоряться для достижения целевой скорости … а также замедлять медленно или быстро.
Это типичная схема подключения двигателя, привода, потенциометра и переключателя. Схемы управления упрощают определение того, как подключить привод в такой конфигурации.Это работает следующим образом: привод сначала получает питание от сети и преобразует его в напряжение постоянного тока. Затем он инвертирует его обратно в смоделированный сигнал переменного тока (ac) или сигнал с широтно-импульсной модуляцией (PWM).Самым большим преимуществом приводов является то, что они позволяют экономить деньги, избавляя двигатель от необходимости постоянно работать на одной скорости.
2. Разберитесь, как применяются промышленные приводы. Диапазон применения Drive варьируется от насосов и вентиляторов до конвейеров и экструдеров — и на самом деле они практически безграничны. Знание используемого приложения помогает OEM-производителям выбрать подходящий привод для работы. Существует множество приводов, поэтому размер и напряжение, а также необходимые опции (такие как включение динамического торможения или заданный сетевой интерфейс) влияют на выбор привода.В конечном итоге эти изменения также диктуют правильные методы настройки и эксплуатации привода.
Существует множество приводов, поэтому размер и напряжение, а также необходимые опции (такие как включение динамического торможения или заданный сетевой интерфейс) влияют на выбор привода.В конечном итоге эти изменения также диктуют правильные методы настройки и эксплуатации привода.
Совет. Во время настройки диска постарайтесь понять, что ожидается от диска и насколько хорошо он должен работать. Такая информация частично указывает на то, что потребуется данному диску во время настройки. Например, работает ли привод в одиночку и вращает ли большой вентилятор? Такое приложение может показаться довольно простым, но даже здесь может потребоваться сопряжение привода с другим оборудованием (например, с программируемым логическим контроллером или ПЛК).Спросите: что еще входит в систему? Приводы — это лишь одна из частей дизайнерской головоломки.
4. Какая проводка необходима для частотно-регулируемого привода (ЧРП)?Подключение частотно-регулируемого привода может быть опасным, если установщик не знаком с продуктом, поэтому обратитесь за помощью к квалифицированному электрику или выполните всю установку.
Конечно, когда соединения выполнены, на привод подается питание. На этом этапе используйте средства индивидуальной защиты (или СИЗ, включая перчатки, куртку и защиту для глаз), чтобы избежать травм.
Когда дело доходит до установки частотно-регулируемых приводов, безопасность является обязательной. Здесь показаны клеммы двигателя привода, через которые к двигателю будет протекать фактический вызывающий движение ток.Еще один совет: убедитесь, что правильно прочитали схемы двигателя и привода, чтобы линия питания была подключена к правильным клеммам привода… а клеммы вывода мощности были правильно подключены к двигателю. В противном случае существует риск повреждения диска или травмы.
Помимо проводки для питания, приводам требуется еще один комплект проводки — проводка управления. Именно через эти соединения элементы управления сообщают приводу, когда запускать и останавливать, а также с какой скоростью он должен работать. Здесь учитывайте, как осуществляется управление приводом.
Именно через эти соединения элементы управления сообщают приводу, когда запускать и останавливать, а также с какой скоростью он должен работать. Здесь учитывайте, как осуществляется управление приводом.
Если он запускается и контролируется по сети, имейте полное представление о том, как устанавливается сетевой компонент и как его инициализировать. Показательный пример: при использовании Ethernet ПЛК или компьютерная система, с которой взаимодействует привод, также требует настройки параметров для связи с приводом.Чтобы сделать это правильно, во время настройки привода может потребоваться обращение к системному специалисту.
Рассмотрим один простой пример конструкции машины, которая включает частотно-регулируемый привод, использующий вход переключателя старт-стоп и аналоговое задание. Изучение схемы управления покажет, где находятся соединения и как они обозначены. Как и в упражнении, распространенном в детских журналах, цель состоит в том, чтобы соединить элементы в левой части страницы с элементами в правой. Таким образом, в случае настройки частотно-регулируемого привода соединения выполняются с помощью экранированной проводки: элементы слева — это переключатель и потенциометр, а элементы справа — это клеммы привода.
5. Какое программирование привода необходимо? До этого момента при настройке привода преобладали соображения физической установки и подключения вручную. Но накопители — это интеллектуальные устройства, которые нуждаются в программировании, как новые смартфоны или даже устаревшие видеомагнитофоны. Список параметров должен быть установлен для привода, чтобы он понимал управляющие сигналы и как на них реагировать. Как уже упоминалось, существуют различные способы управления промышленным приводом, в том числе через сетевой интерфейс, такой как Ethernet, или с помощью переключателей и потенциометров.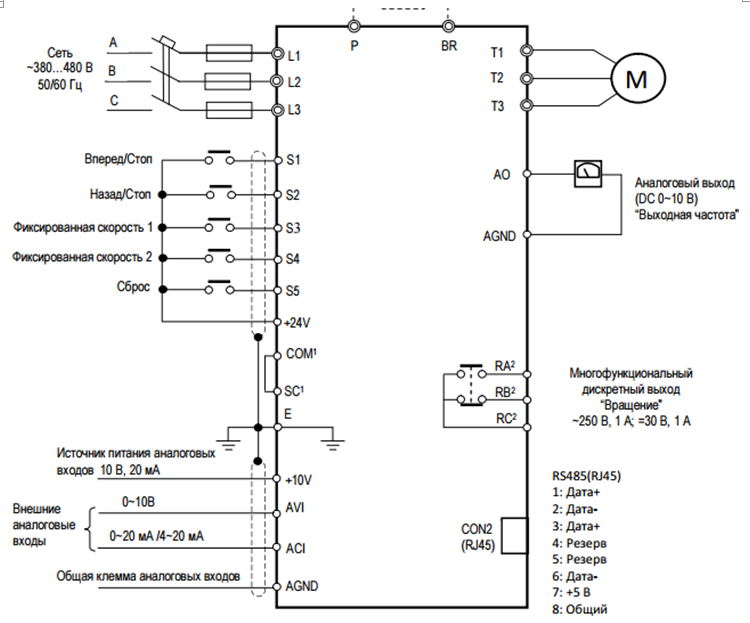
имеют параметры, для которых конечный пользователь должен запрограммировать конструкцию… поскольку приводы работают, чтобы удовлетворять командам, основанным на фиксированных настройках системы, а также на входах и выходах. Ниже приведены минимальные параметры, которые необходимо установить:
Данные с заводской таблички двигателя:
Ампер полной нагрузки (FLA) • Напряжение • Максимальная частота (или скорость в об / мин для расчета частоты в Гц)
Контроль:
Источник работы (пуск и останов) • Источник задания частоты или скорости
Рассмотрим один пример: при использовании привода Yaskawa серии 1000 эти настройки равны…
• Источник задания частоты b1-01 (по умолчанию для клемм) • Источник работы b1-02 (по умолчанию для клемм) • Максимальная выходная частота E1-04 • Максимальное выходное напряжение E1-05 • Двигатель E2-01 FLA
В этом примере переключатель и потенциометр подключаются к клеммам управления привода.Переключатель запускает и останавливает привод, а потенциометр регулирует скорость. Иногда для дисков по умолчанию используется этот тип интерфейса, поэтому конечные пользователи могут легко установить и запустить диск с минимальными усилиями.
6. Есть еще что-нибудь?Имейте в виду, что вам, возможно, придется выполнить поиск неисправностей VFD. Как только привод подключен и подключен к сети, вращается ли двигатель в правильном направлении? Если нет, то, возможно, потребуется поменять местами пару выводов привода, но не ввод.Это связано с тем, что питание входной линии не подключено напрямую к выходу.
Здесь показан привод Yaskawa A1000. Установка привода всегда представляет опасность из-за наличия электрических соединений. Вот почему так важно следовать инструкциям по настройке и при необходимости привлекать профессионалов.
Отображается ли аварийный сигнал или неисправность? На дисплее привода может отображаться сообщение, указывающее, есть ли условие, препятствующее запуску привода. Например, это может быть состояние перегрузки.Здесь потребуется проверка нагрузки, к которой подключен двигатель. Он слишком тяжелый или ускоряется слишком быстро? Это может потребовать физической регулировки или настройки параметра для более медленного запуска.
Фактически, другие дисплеи, такие как мониторы, могут отображать активность, например ток, чтобы помочь конечным пользователям обеспечить оптимальную работу привода.
Нет ли на выходе привода чрезмерного тока? Или, может быть, закрытие цифрового входа не действует. Если это так, входные данные потребуют отслеживания изменений.Привод, который останавливается или выходит из строя, требует постоянного контроля, чтобы он не останавливался снова и не порождал новые проблемы.
Есть и другие соображения. Что делать, если находящийся в эксплуатации диск вышел из строя и нуждается в замене? Для решения этой проблемы достаточно получить точную замену и перепрограммировать ее. Чтобы вернуть преобразователь в рабочее состояние, необходимо сбросить последние параметры. Для этого следуйте инструкциям по программированию во время настройки.
Одно предупреждение для закрытия: если выбор и установка диска новые и незнакомые, обратитесь за поддержкой к местному поставщику.Установка и настройка накопителя могут быть опасными, если они выполнены неправильно, поэтому всегда лучше привлечь квалифицированного дизайнера или установщика для выполнения процесса.
Яскава Америка | yaskawa.com/support-training
Руководство по выбору преобразователя частоты
Вкратце описаны некоторые из основных критериев успешной установки преобразователя частоты Питание преобразователя частоты Напряжение
Всегда проверяйте наличие правильного напряжения. Во многих случаях пользователь интерпретирует преобразователь частоты так, что вы можете питать устройство однофазным напряжением 220 В переменного тока и управлять трехфазным двигателем, рассчитанным на 380 В переменного тока. Большинство стандартных асинхронных двигателей могут работать с трехфазным напряжением 380 В переменного тока со всеми шестью выводами имеющихся обмоток, подключенными по схеме «звезда». Тот же двигатель может работать с трехфазным напряжением 220 В переменного тока, если выводы обмоток соединены по схеме треугольника. Однако проконсультируйтесь с производителем двигателя, если это не указано на паспортной табличке двигателя.
Большинство стандартных асинхронных двигателей могут работать с трехфазным напряжением 380 В переменного тока со всеми шестью выводами имеющихся обмоток, подключенными по схеме «звезда». Тот же двигатель может работать с трехфазным напряжением 220 В переменного тока, если выводы обмоток соединены по схеме треугольника. Однако проконсультируйтесь с производителем двигателя, если это не указано на паспортной табличке двигателя.
Мощность преобразователя частоты, л.с.
Подбирать преобразователь частоты в соответствии с мощностью двигателя в «л.с.» не совсем правильно.Преобразователь частоты лучше выбирать исходя из номинального тока двигателя. Если преобразователь частоты и двигатель имеют одинаковую мощность (л.с.), увеличение числа полюсов двигателя снижает КПД и коэффициент мощности двигателя, увеличивая номинальное значение тока.
Требования к крутящему моменту двигателя
Если мы посмотрим на следующие расчеты, мы поймем, почему происходит потеря крутящего момента при работе двигателя со скоростью выше базовой. Это также объяснит некоторые из основных требований, почему крутящий момент является важным фактором при выборе преобразователя частоты.
Скорость двигателя:
Где:
n = Скорость двигателя (об / мин)Крутящий момент двигателя:
60 = Секунды
f = Частота сети (Гц)
P = пары полюсов двигателя (четырехполюсный двигатель будет иметь 2 пары)
Где:
Вт =Пример:
Вт π = Pi (Математическая константа = 3,142)
M = крутящий момент (Нм)
Инженер-механик проектирует машину, которая требует 405 Нм и диапазон скоростей от 100 до 175 об / мин.Установив на машину коробку передач с передаточным числом 10/1, он снижает требуемый входной крутящий момент до 40,5 Нм, минимальная и максимальная входная частота вращения увеличивается до 700 и 1750 об / мин соответственно. Четырехполюсный двигатель мощностью 7,5 кВт (1500 об / мин при 50 Гц) выдает 47,8 Нм. Нам нужно рассчитать, будет ли он производить достаточный крутящий момент на максимальной скорости.
Уменьшить скорость до 1000 об / мин не проблема, пока он поддерживает скорость двигателя выше 50% от базовой скорости для обеспечения достаточного охлаждения.
Преобразователь частоты будет создавать крутящий момент двигателя при полной нагрузке до базовой частоты, изменяя напряжение для создания необходимого крутящего момента.Когда двигатель достигает своей базовой скорости и напряжения питания, преобразователь частоты может изменять только частоту, подаваемую на двигатель, для увеличения скорости, поскольку преобразователь частоты не может подавать напряжение выше, чем напряжение питания.
Чтобы рассчитать крутящий момент, создаваемый 7,5 кВт при 1750 об / мин, мы должны манипулировать приведенной выше формулой.
M = (Ш x 60) / (2 x π x n)Следовательно, 7.Двигатель мощностью 5 кВт с установленным преобразователем частоты может создавать необходимый крутящий момент при правильной скорости. Из этого мы видим, что всегда необходимо проверять, находится ли диапазон скорости / крутящего момента в пределах возможностей инвертора и двигателя.
М = (7500 х 60) / (2 х 3,142 х 1750)
M = 40,9 Нм
Преобразователь частоты торможение постоянным током впрыском
В большинстве подъемных устройств двигатель должен оставаться на нулевой скорости и в течение короткого периода времени, позволяя механическому тормозу открываться или закрываться. Чтобы удерживать двигатель в этом положении, преобразователь частоты подает на двигатель постоянный ток, который заставляет его создавать крутящий момент в состоянии покоя (нулевая скорость). Этот тип торможения иногда неправильно понимают как торможение шиной постоянного тока, что объясняется в следующем разделе.При выборе преобразователя частоты и приложений, требующих этой функции, убедитесь, что это именно та функция.
Преобразователь частоты Торможение по шине постоянного тока / резистивное торможение
Торможение шиной постоянного тока предназначено для управления замедлением асинхронных двигателей без активации функции защиты от перенапряжения на преобразователях частоты. Когда приложениям требуется функция быстрого замедления или нагрузка очень нестабильна, ею можно управлять с помощью этой функции. В зависимости от приложения существуют различные методы решения проблемы.Это может быть сделано с помощью регенеративной системы, возвращающей энергию в сеть, или с помощью тормозного блока и тормозных резисторов, рассеивающих энергию через внешние резисторы.
Основными преимуществами регенеративной системы переменного тока являются:
- Сохранение энергии
- Дорого в установке
- Форма волны входного тока — синусоида.
- Входной ток имеет коэффициент мощности, близкий к единице.
- Выходное напряжение двигателя может быть выше доступного А.C. напряжение сети
- Рекуперативный блок будет синхронизироваться с любой частотой от 30 до 100 Гц, при условии, что напряжение питания составляет от 380 В — 10% до 480 В + 10%.
- В условиях нестабильности сети переменного тока рекуперативная система преобразователя частоты может продолжать работать при напряжении питания переменного тока примерно 270 В без какого-либо влияния на напряжение шины постоянного тока и, следовательно, на работу преобразователей частоты двигателя.
- Рекуперативный преобразователь частоты и преобразователь частоты двигателя идентичны.
% PDF-1.6 % 1 0 obj > эндобдж 6 0 obj / ProductGroup1 (Преобразователи частоты) / ProductFamily1 (VLT 2800) / Documenttype (Инструкция по эксплуатации) / Division (Приводы PE PL09 VLT) / Local # 20title / Номер литературы (MG27A202) / DocumentKey (TLI0000000000000030000000354A2EN) >> эндобдж 2 0 obj > поток Acrobat Distiller 7.0 (Windows) 2006-12-08T12: 02: 04 + 01: 002015-08-10T13: 27: 10 + 02: 00XSL Formatter V3.4 MR5e (3,4,2006,1018) для Windows 2015-08-10T13: 27: 10 + 02: 00application / pdf
Технология управления | Объяснение 5 основных изменений параметров VFD
Предоставлено: Yaskawa America Inc.
.Цели обучения
- Установка пяти параметров может решить большую часть программирования ЧРП.
- Учитывайте метод управления VFD, FLA двигателя, время ускорения и замедления.
- Также учитывайте скорость и источник хода и остаточную неисправность.
Преобразователи частоты (VFD) — это электронные устройства, использующие быстродействующие переключатели или биполярный транзистор с изолированным затвором (IGBT) для преобразования трехфазной входной мощности в переменную частоту и выходное напряжение для управления скоростью двигателя. Настройки ЧРП содержат программирование, и для большинства приложений приходится изменять пять параметров.
С помощью частотно-регулируемых приводов электродвигатели могут использоваться для выполнения широкого спектра приложений для достижения управления, невозможного при работе в сети или с помощью механических средств.С двигателями, управляемыми частотно-регулируемым приводом, пользователи могут оптимизировать эффективность системы, подбирая скорость двигателя для точного соответствия требованиям системы. Большинство приложений ЧРП повышают эффективность системы и обеспечивают окупаемость инвестиций ЧРП в энергосбережение, как правило, менее чем за год.
Как и вся электроника, частотно-регулируемые приводы расширили возможности и функции, обеспечивая больший контроль над системой, помогая устранить внешние устройства и программируемые логические контроллеры (ПЛК). Понятно, что из-за этих нововведений кто-то может быть ошеломлен перспективой программирования частотно-регулируемых приводов для их применения.Однако в большинстве приложений для работы двигателя требуются только самые основные настройки. Это потому, что VFD спроектированы так, чтобы упростить сложное.
В большинстве случаев настроек ЧРП по умолчанию достаточно для применения и не требуется никакой регулировки. Обычно для приложения настраивается не более десятка настроек. Ниже приведен список из пяти основных настроек параметров, запрограммированных установщиками VFD, чтобы объяснить, что это за настройки и зачем они нужны.
Рис. 1: В частотно-регулируемых приводах предусмотрены предварительно сконфигурированные перегрузки для учета множества различных типов двигателей, включая нагрузки с переменным крутящим моментом в диапазоне скоростей 40: 1, нагрузки с постоянным крутящим моментом в диапазоне скоростей 100: 1 и даже нестандартные двигатели, такие как двигатели с постоянными магнитами. Предоставлено: Yaskawa America Inc.
.Влияние метода управления на программирование частотно-регулируемого привода
1. Что такое метод управления применительно к частотно-регулируемым приводам?
Первой настройкой, обычно устанавливаемой установщиками VFD, является метод управления.Метод управления определяет возможности привода по регулированию скорости двигателя. Эти возможности управления можно разделить на три группы: управление вольт на герц, векторное управление с самочувствительностью и векторное управление с обратной связью.
КонтрольВольт на Герц (В / f) — это наиболее часто используемый метод управления двигателем. Это самая простая из трех топологий.
УправлениеU / f фиксирует выход привода на предварительно заданной кривой напряжения и частоты, которой двигатель должен следовать при настройке команды скорости частотно-регулируемого привода.Эти характеристики U / f можно отрегулировать для обеспечения высокого пускового момента или уменьшить, чтобы оптимизировать эффективность для нагрузок с переменным крутящим моментом, которые не требуют постоянного отношения напряжения к частоте.
Векторное управление с автоматическим опознаванием — это метод управления, который обеспечивает более точную регулировку скорости двигателя. ЧРП могут реализовать это управление, используя различные сложные схемы управления. По сути, для мониторинга, интерпретации и реагирования на обратную связь по току используются сложные алгоритмы, чтобы обеспечить точное управление двигателем.Однако самый простой способ рассматривать этот метод управления — рассматривать его как точное управление двигателем без необходимости использования энкодера.
Векторное управление с обратной связью — это наиболее совершенный метод управления двигателем. Как следует из названия, векторное управление с обратной связью использует энкодер двигателя для обеспечения точной обратной связи по скорости и устранения любых ошибок в управлении VFD, возникающих в результате реакции на обратную связь по току. Добавление энкодера сообщает VFD, что делает двигатель и как он реагирует на нагрузку.
Зачем мне изменять метод управления?
Регулировка метода управления — это функция удовлетворения потребностей моторного привода. Некоторые приложения просты и должны работать только с приблизительной скоростью, в то время как другим требуется точное и динамическое управление двигателем. Каждая из этих схем управления удовлетворяет потребности приложения и / или ограничивает необходимое программирование для запуска и работы системы.
РегуляторU / f обычно используется для систем, не требующих точного регулирования скорости, таких как вентиляторы или насосы.В большинстве основных методов управления U / f двигатель может проскальзывать (дрейфовать) в сторону от заданной скорости. Небольшое изменение скорости мало влияет на общую производительность системы, потому что другое программирование привода будет регулировать скорость для поддержания требований системы.
Например, если вентилятору предлагается работать на половинной скорости и он не может поддерживать спрос, то в большинстве конфигураций системы через контур PI преобразователя частоты или внешнее устройство будет увеличиваться команда скорости, чтобы обеспечить скорость двигателя, необходимую для удовлетворения спроса.Управление напряжением / частотой — наиболее часто используемый метод управления, поскольку для его реализации практически не требуется никакого программирования.
Большинство производителей приводов, благодаря многолетнему опыту применения, уже настроили свои настройки по умолчанию для большинства применений насосов и вентиляторов. Эти настройки по умолчанию обеспечивают оптимальную экономию энергии с минимальными требованиями к программированию или без них. Даже в приложениях с неизменяемым крутящим моментом, таких как компрессор, можно использовать управление U / f для простоты настройки.
Самочувствительные векторные методы управления улучшают управление технологическим процессом и сокращают техническое обслуживание.Например, автоматическое векторное управление регулирует скорость двигателя с точностью до 1/200 номинальной скорости двигателя, обеспечивает динамическое управление скоростью, высокий пусковой крутящий момент вплоть до низких скоростей и ограничивает ток и крутящий момент без внешних устройств. Чтобы обеспечить эти расширенные возможности управления двигателем, частотно-регулирующему преобразователю требуется конкретная информация о характеристиках двигателя, например, ток холостого хода, сопротивление и индуктивности.
Чтобы получить эту ключевую информацию, частотно-регулируемый привод должен выполнить простую настройку двигателя, требующую ввода основных данных с паспортной таблички двигателя, таких как номинальный ток, напряжение и скорость, с клавиатуры.Применения, в которых больше всего выигрывают от этого управления, включают миксеры, стиральные машины и штамповочные прессы.
Векторный контроль с замкнутым контуром добавляет сигнал обратной связи по скорости для максимального управления процессом и минимизации технического обслуживания. Векторное управление с обратной связью обеспечивает точное управление скоростью до одного об / мин, высокий пусковой крутящий момент при нулевой скорости, управление нулевой скоростью и регулирование крутящего момента. Эти функции используются в приложениях, которые не могут отклоняться более чем на несколько оборотов в минуту, иначе выходная мощность продукта не будет соответствовать его разработанным спецификациям.
Например, многие экструдеры используют обратную связь от энкодера для поддержания скорости двигателя в соответствии с точными требованиями, чтобы гарантировать соответствие продукта его спецификациям. Обратная связь энкодера также обеспечивает точный мониторинг крутящего момента, позволяя ЧРП реагировать на условия высокого крутящего момента, которые могут привести к засорению или повреждению машины. Те же требования к настройке двигателя, что и при векторном управлении с автоматическим определением, требуются при векторном управлении с обратной связью для оптимизации управления двигателем и уменьшения компенсации, необходимой для обратной связи энкодера.
Чем лучше VFD понимает характеристики двигателя, тем лучше он может управлять двигателем. Это верно с обратной связью двигателя или без нее. Такие приложения, как экструдеры, высокоскоростные шпиндели и размотчики с постоянным натяжением, используют преимущества векторного управления с обратной связью.
Рис. 2: Использование подходящего времени ускорения и замедления значительно снизит пусковой ток двигателя при пуске и скачки тока при изменении скорости. Меньший пусковой ток увеличивает срок службы двигателя (меньше нагрева) и трансмиссии (меньше динамических изменений высокого крутящего момента).ЧРП также изолирует эти токи от линии. Предоставлено: Yaskawa America Inc.
.Настройка ЧРП для тока полной нагрузки двигателя (FLA)
2. Что такое ток при полной нагрузке двигателя?
Поскольку большинство настроек метода управления VFD уже установлены по умолчанию для их наиболее распространенного применения, реальная первая настройка, запрограммированная любым установщиком VFD, — это уставка тока полной нагрузки двигателя (FLA) или номинального тока двигателя. Двигатели спроектированы так, чтобы обеспечить непрерывную работу при номинальных токах, указанных на паспортной табличке, при работе с номинальной мощностью и номинальным напряжением.Программирование частотно-регулируемого привода с номинальным значением FLA двигателя настраивает электронную тепловую перегрузку частотно-регулируемого привода для работающего двигателя.
Зачем мне устанавливать ток двигателя при полной нагрузке?
Хотя частотно-регулируемые приводы являются естественными устройствами плавного пуска, двигатели могут превышать номинальные токи в течение коротких периодов времени, например, во время пуска, ударной нагрузки, быстрого замедления или чрезмерного циклического переключения приложений. Однако высокие токи в течение длительных периодов времени приведут к чрезмерному нагреву двигателя, что может привести к сокращению срока службы и преждевременному выходу из строя.Заблокированный ротор также может возникнуть из-за механического повреждения нагрузки или муфты. Со временем износ нагрузки также может привести к увеличению потребляемого тока, который может превышать номинальную мощность двигателя.
Чтобы избежать отказа двигателя, настройка FLA двигателя частотно-регулируемого привода должна быть запрограммирована в соответствии с заводской табличкой двигателя. Включение электронной тепловой перегрузки частотно-регулируемого привода в приводе удовлетворяет требованиям защиты двигателя от перегрузки, требуемым Национальным электрическим кодексом (NEC) и местными нормативными документами. Использование электронной тепловой перегрузки частотно-регулируемого привода позволяет пользователю устранить механическую перегрузку двигателя, что исключает затраты, потенциальную точку отказа и любые требования к техническому обслуживанию, связанные с поддержанием целостности контактов перегрузки.
Функция электронной защиты частотно-регулируемого привода оценивает уровень перегрузки двигателя на основе выходного тока, выходной частоты, тепловых характеристик двигателя и времени. Когда частотно-регулируемый привод обнаруживает перегрузку двигателя, срабатывает отказ, и выход частотно-регулируемого привода отключается, чтобы защитить двигатель от теплового отказа.
Эти кривые перегрузки можно настроить в соответствии с возможностями двигателя. Многие двигатели насосов-вентиляторов рассчитаны на нагрузку с переменным крутящим моментом, что означает, что они не рассчитаны на номинальный ток при пониженной скорости.
Уменьшение продолжительных перегрузок позволяет сократить объем технического обслуживания и обеспечить максимальный срок службы двигателя. Преобразователи частоты имеют предварительно сконфигурированные перегрузки для учета множества различных типов двигателей, включая нагрузки с переменным крутящим моментом в диапазоне скоростей 40: 1, нагрузки с постоянным крутящим моментом в диапазоне скоростей 100: 1 и нестандартные двигатели, такие как двигатели с постоянными магнитами (см. Рисунок 1).
Время разгона и замедления
3. Какое время разгона и замедления для системы моторного привода?
Преобразователи частоты— это естественные устройства плавного пуска.Они уменьшают пусковой ток при изменении скорости. Для этого частотно-регулируемый привод запускает и останавливает двигатель на основе запрограммированного времени ускорения и замедления. Эти времена или скорости нарастания определяют, сколько времени потребуется приводу, чтобы перейти от нулевой скорости к максимальной частоте. Могут быть фиксированные скорости или несколько наборов скоростей, которые регулируются в зависимости от условий работы или с помощью команд, отправляемых на частотно-регулируемый привод (см. Рисунок 2).
Зачем нужно устанавливать время разгона / замедления?
Использование подходящего времени ускорения и замедления значительно снизит пусковой ток при пуске и скачки тока при изменении скорости.Это приводит к увеличению срока службы двигателя (меньше нагрева) и трансмиссии (меньше динамических изменений высокого крутящего момента). ЧРП также изолирует эти токи от линии. Таким образом, трансформатор не должен подавать большие скачки напряжения, которые могут вызвать ненужный нагрев или повлиять на его напряжение питания, что может повлиять на производительность частотно-регулируемого привода или другие нагрузки в системе. Более низкие пусковые токи означают, что коммунальные предприятия не взимают плату за потребление из-за скачков тока / мощности.
Для частотно-регулируемых приводовпо умолчанию установлено наиболее часто используемое время ускорения и замедления в зависимости от их предполагаемого применения.Приводы вентилятора / насоса будут иметь более длительное время разгона, в то время как промышленные приводы общего назначения будут иметь более короткое время разгона. Это помогает упростить процесс установки. Однако не все значения по умолчанию работают для каждого приложения. Регулировка времени разгона потребовалась бы, чтобы токи оставались в пределах, установленных для привода и двигателя.
В зависимости от инерции нагрузки можно запускать / останавливать нагрузку быстрее, чем это разрешено в зависимости от текущих возможностей привода / двигателя. Сильные темпы ускорения / замедления приведут к более высоким токам, которые могут вызвать нагрузку на привод и двигатель и привести к перегрузке или перегрузкам по току.Установка правильного времени ускорения и замедления обеспечивает надлежащую работу системы, гарантируя отсутствие сбоев в работе.
Поворотные точки на кривой ускорения / замедления возникают в начале и остановке каждой рампы. Именно здесь требуется наибольший крутящий момент или ток, чтобы обеспечить желаемое движение двигателя. Таким образом, в ситуациях, когда общее время разгона должно оставаться низким, можно отрегулировать эти точки, чтобы уменьшить общее время разгона. Эти точки называются синхронизацией рывков или s-образной кривой.Эти настройки увеличивают время в точках высокой нагрузки рампы ускорения или замедления, чтобы уменьшить влияние на общее время пуска / останова (см. Рисунок 3).
Рис. 3: Поворотные точки на кривой ускорения / замедления возникают в начале и остановке каждой рампы, где требуется наибольший крутящий момент или ток для достижения желаемого движения двигателя. Когда общее время разгона должно оставаться низким, корректировка этих точек может сократить общее время разгона. Эти точки называются синхронизацией рывков или s-образной кривой.Предоставлено: Yaskawa America Inc.
.Для управления двигателем требуются частота вращения и источник хода
4. Какой источник скорости и запуска?
VFD требует двух вещей в каждый момент своей работы: команды пуска и задания скорости. Команда запуска сообщает приводу, что он должен управлять двигателем, а задание скорости сообщает частотно-регулируемому преобразователю, какую частоту следует запускать. Оба входа необходимы для управления двигателем. В противном случае мотор простаивает. Настройка или отсутствие настройки — один из наиболее распространенных вызовов технической поддержки для устранения неполадок, которые выполняет установщик VFD.
Зачем мне нужно устанавливать скорость и команду запуска?
Установка скорости и команды запуска частотно-регулируемого привода больше касается того, как выбрать запуск двигателя, а не того, хотят ли они, чтобы двигатель работал. Большинство производителей по умолчанию используют свои приводы для работы от цифровых и аналоговых входов. Контакты и реле подключены к приводу, чтобы запустить команду запуска привода. Затем аналоговые входы используются для подачи задания скорости на привод. Эти аналоговые задания могут быть сигналами 0-10 В постоянного тока, +/- 10 В постоянного тока, 0-20 мА или 4-20 мА.У каждого справочного источника есть свои преимущества. Опорное напряжение просто, чтобы генерировать и легко понять, в то время как текущие сигналы распространяются на большие расстояния, не будучи подвержено воздействию поблизости от электрического шума. Другие способы управления реализуются посредством прямого управления с клавиатуры или через сетевую связь.
Каждое из этих заданий указывает частотно-регулирующему преобразователю точную скорость, необходимую для работы двигателя. Чем точнее задание управления скоростью двигателя ЧРП, тем точнее ЧРП удовлетворяет требованиям системы.Точное соответствие требованиям системы означает более высокую экономию энергии, достигаемую частотно-регулируемым приводом. Цель любого командного интерфейса — обеспечить контроль, необходимый для системы, обеспечивающий максимальную эффективность, качество и безопасность.
Сброс неисправности
5. Что такое сброс отказа на ЧРП?
Существует множество внешних по отношению к приводу условий, которые могут привести к условиям эксплуатации, выходящим за рамки их технических характеристик. Чтобы продлить срок службы продукта и предотвратить отказы, частотно-регулируемые приводы включают и запускают сбои для своей защиты.Примеры условий, которые могут вызвать отказ частотно-регулируемого привода, включают агрессивное время пуска, агрессивное время останова, потерю мощности и состояние блокировки ротора.
Зачем настраивать сброс неисправности при настройке частотно-регулируемых приводов?
Многие частотно-регулируемые приводы имеют возможность автоматического сброса неисправностей. Эта функция позволяет приводу обнаруживать состояние, выходящее за рамки его программирования, и запускать отказ, чтобы защитить себя, двигатель и остальную механическую систему. Функция сброса неисправности позволяет пользователю обнаруживать события и, в случае их устранения, возвращать привод в нормальный режим работы.Целью автоматического сброса является устранение нежелательных неисправностей и поддержание непрерывной работы. Простой стоит денег, а функция автоматического сброса позволяет системе поддерживать работу в случае событий, которые не были сочтены необходимыми для остановки производства, до тех пор, пока не будет осмотрено сертифицированным персоналом.
Примером этого может быть скачок напряжения, вызванный грозой. Это редкие случаи, которые не требуют дальнейшего анализа. Привод прекратил работу в таких условиях, тем самым защищая себя.Функция автоматического сброса позволяет накопителю начать резервное копирование без вмешательства пользователя, что экономит время и деньги.
Обязательно установите 5 верхних параметров ЧРП
Есть много способов реализовать технологию частотно-регулируемого привода для автоматизации управления двигателем. Настройка частотно-регулируемого привода может быть сложной, но большинство приложений требует незначительной настройки для запуска и работы. Более того, VFD упростили процесс установки. Один из способов — использовать процедуры запуска приложений или мастера.
Эти процедуры проводят установщика через процесс программирования привода с помощью меню вопросов и ответов, чтобы гарантировать, что приложение запрограммировано для работы по мере необходимости.ЧРП разработаны для простоты использования и максимизации окупаемости инвестиций (ROI) за счет оптимизации эффективности, качества и безопасности.
Кристофер Ящолт — менеджер по продукции, Yaskawa America Inc. Под редакцией Марка Т. Хоске, контент-менеджера, Control Engineering , CFE Media, [email protected].
КЛЮЧЕВЫЕ СЛОВА: Программирование частотно-регулируемого привода, конфигурация ЧРП
УЧИТЬСЯ
Что нужно для программирования или настройки VFD в соответствии с приложением?
Двигатели переменного тока, контроллеры и частотно-регулируемые приводы
Что такое двигатель переменного тока?
Основы электродвигателя переменного тока
Стандартное определение двигателя переменного тока — это электродвигатель, приводимый в действие переменным током.Двигатель переменного тока используется для преобразования электрической энергии в механическую. Эта механическая энергия создается за счет использования силы, создаваемой вращающимися магнитными полями, создаваемыми переменным током, протекающим через его катушки. Двигатель переменного тока состоит из двух основных компонентов: неподвижного статора, который находится снаружи и имеет катушки, на которые подается переменный ток, и внутреннего ротора, который прикреплен к выходному валу.
Как работает двигатель переменного тока?
Основная работа двигателя переменного тока основана на принципах магнетизма.Простой двигатель переменного тока содержит катушку с проводом и два фиксированных магнита, окружающих вал. Когда электрический заряд (переменного тока) прикладывается к катушке с проволокой, она становится электромагнитом, генерирующим магнитное поле. Проще говоря, когда магниты взаимодействуют, вал и катушка проводов начинают вращаться, приводя в движение двигатель.
Обратная связь двигателя переменного тока
ПродуктыAC Motor имеют два варианта управления с обратной связью. Эти опции представляют собой преобразователь двигателя переменного тока или энкодер двигателя переменного тока.И резольвер двигателя переменного тока, и энкодер двигателя переменного тока могут определять направление, скорость и положение выходного вала. Хотя и преобразователь двигателя переменного тока, и энкодер двигателя переменного тока предлагают одно и то же решение для различных приложений, они сильно различаются.
В резольверах двигателей переменного тока используется второй набор катушек статора, называемый трансформатором, для создания напряжения на роторе в воздушном зазоре. Поскольку в резольвере отсутствуют электронные компоненты, он очень прочный и работает в широком диапазоне температур. Резольвер двигателя переменного тока также естественно устойчив к ударам благодаря своей конструкции.Резольвер часто используется в суровых условиях.
В оптическом кодировщике электродвигателя переменного тока используется затвор, который вращается для прерывания луча света, проходящего через воздушный зазор между источником света и фотодетектором. Вращение заслонки со временем вызывает износ энкодера. Этот износ снижает долговечность и надежность оптического кодировщика.
Тип приложения определяет, нужен ли преобразователь или кодировщик. Энкодеры двигателей переменного тока проще в реализации и более точны, поэтому им следует отдавать предпочтение в любом приложении.Резолвер следует выбирать только в том случае, если этого требует среда, в которой он будет использоваться.
Основные типы двигателей переменного тока
Электродвигатели переменного тока выпускаются трех различных типов: индукционные, синхронные и промышленные. Эти типы двигателей переменного тока определяются конструкцией ротора, используемого в конструкции. В линейке продуктов Anaheim Automation представлены все три типа.
Асинхронный двигатель переменного тока
Асинхронные двигатели переменного тока называются асинхронными двигателями или вращающимися трансформаторами.Этот тип двигателя переменного тока использует электромагнитную индукцию для питания вращающегося устройства, которым обычно является вал. Ротор в асинхронных двигателях переменного тока обычно вращается медленнее, чем его частота. Наведенный ток — это то, что вызывает магнитное поле, окружающее ротор этих двигателей. Этот асинхронный двигатель переменного тока имеет одну или три фазы.
Синхронный двигатель переменного тока
Синхронный двигатель обычно представляет собой двигатель переменного тока, ротор которого вращается с той же скоростью, что и переменный ток, который к нему подается.Ротор также может вращаться со скоростью, кратной величине подаваемого на него тока. Контактные кольца или постоянный магнит, на который подается ток, создают магнитное поле вокруг ротора.
Промышленный двигатель переменного тока
Промышленные двигатели переменного токаразработаны для применений, в которых требуется трехфазный асинхронный двигатель большой мощности. Номинальная мощность промышленного двигателя превышает номинальную мощность стандартного однофазного асинхронного двигателя переменного тока. Anaheim Automation предлагает промышленные электродвигатели переменного тока мощностью от 220 до 2200 Вт в трехфазном режиме при 220 или 380 В переменного тока.
Где используются двигатели переменного тока?
В каких отраслях используются двигатели переменного тока?
Электродвигатели переменного тока в основном используются в быту из-за их относительно низких производственных затрат и долговечности, но также широко используются в промышленных приложениях.
Для каких применений используются двигатели переменного тока?
Двигатели переменного тока можно найти во многих бытовых приборах и приложениях, в том числе:
— Часы
— Электроинструменты
— Дисковые накопители
— Стиральные машины и другая бытовая техника
— Аудиопроигрыватели
— Вентиляторы
Их также можно найти в промышленном применении:
— насосы
— нагнетатели
— конвейеры
— компрессоры
Как управляются двигатели переменного тока?
Контроллеры переменного тока:
Основы
Контроллер переменного тока (иногда называемый драйвером) известен как устройство, контролирующее скорость двигателя переменного тока.Контроллер переменного тока также может называться частотно-регулируемым приводом, приводом с регулируемой скоростью, преобразователем частоты и т. Д. Двигатель переменного тока получает мощность, которая в конечном итоге преобразуется контроллером переменного тока в регулируемую частоту. Этот регулируемый выход позволяет точно контролировать скорость двигателя.
Компоненты контроллера переменного тока
Обычно контроллер переменного тока состоит из трех основных частей: выпрямителя, инвертора и звена постоянного тока для их соединения.Выпрямитель преобразует входной переменный ток в постоянный ток (постоянный ток), а инвертор переключает постоянное напряжение на выходное переменное напряжение с регулируемой частотой. Инвертор также можно использовать для управления выходным током, если это необходимо. И выпрямитель, и инвертор управляются набором элементов управления для генерации определенного количества переменного напряжения и частоты, чтобы соответствовать системе двигателя переменного тока в данный момент времени.
Приложения
Контроллер переменного тока может использоваться во многих различных промышленных и коммерческих приложениях.Контроллер переменного тока, который чаще всего используется для управления вентиляторами в системах кондиционирования и отопления, позволяет лучше контролировать воздушный поток. Контроллер переменного тока также помогает регулировать скорость насосов и воздуходувок. В последнее время применяются конвейеры, краны и подъемники, станки, экструдеры, линии для производства пленки и прядильные машины для текстильного волокна.
Преимущества и недостатки
Преимущества
— Увеличивает срок службы двигателя за счет высокого коэффициента мощности
— Экономичное регулирование скорости
— Оптимизация пусковых характеристик двигателя
— Более низкие затраты на обслуживание, чем при управлении постоянным током
Недостатки
— генерирует большое количество тепла и гармоник
История
Никола Тесла изобрел первый асинхронный двигатель переменного тока в 1888 году, представив более надежный и эффективный двигатель, чем двигатель постоянного тока.Однако регулирование скорости переменного тока было сложной задачей. Когда требовалось точное управление скоростью, двигатель постоянного тока стал заменой двигателя переменного тока из-за его эффективных и экономичных средств точного управления скоростью. Только в 1980-х годах регулятор скорости переменного тока стал конкурентом. Со временем технология привода переменного тока в конечном итоге превратилась в недорогого и надежного конкурента традиционному управлению постоянным током. Теперь контроллер переменного тока может управлять скоростью с полным крутящим моментом, достигаемым от 0 об / мин до максимальной номинальной скорости.
Частотно-регулируемые приводы
Основы
Частотно-регулируемый привод — это особый тип привода с регулируемой скоростью, который используется для управления скоростью двигателя переменного тока. Чтобы управлять скоростью вращения двигателя, частотно-регулируемый привод регулирует частоту подаваемой на него электроэнергии. Добавление частотно-регулируемого привода к приложению позволяет регулировать скорость двигателя в соответствии с его нагрузкой, что в конечном итоге позволяет экономить энергию.Частотно-регулируемый привод, обычно используемый во множестве приложений, работает в системах вентиляции, насосах, конвейерах и приводах станков.
Как работает частотно-регулируемый привод
Когда полное напряжение подается на двигатель переменного тока, он сначала ускоряет нагрузку и снижает крутящий момент, сохраняя ток особенно высоким, пока двигатель не достигнет полной скорости. Частотно-регулируемый привод работает иначе; он устраняет чрезмерный ток, контролируемое повышение напряжения и частоты при запуске двигателя.Это позволяет двигателю переменного тока генерировать до 150% от номинального крутящего момента, который потенциально может быть создан с самого начала, вплоть до полной скорости, без потерь энергии. Частотно-регулируемый привод преобразует мощность через три различных этапа. Сначала мощность переменного тока преобразуется в мощность постоянного тока, после чего включаются и выключаются силовые транзисторы, вызывая форму волны напряжения на желаемой частоте. Эта форма сигнала затем регулирует выходное напряжение в соответствии с предпочтительным обозначенным значением.
Физические свойства
Обычно система частотно-регулируемого привода включает двигатель переменного тока, контроллер и интерфейс оператора.Трехфазный асинхронный двигатель чаще всего применяется в частотно-регулируемом приводе, поскольку он обеспечивает универсальность и экономичность по сравнению с однофазным или синхронным двигателем. Хотя в некоторых случаях они могут быть полезными, в системе частотно-регулируемого привода часто используются двигатели, предназначенные для работы с фиксированной скоростью.
Интерфейсы оператора частотно-регулируемого привода позволяют пользователю регулировать рабочую скорость, а также запускать и останавливать двигатель. Интерфейс оператора может также позволить пользователю переключаться и реверсировать между автоматическим управлением или ручным регулированием скорости.
Преимущества частотно-регулируемого привода
— Температуру технологического процесса можно регулировать без отдельного контроллера
— Низкие затраты на обслуживание
— Более длительный срок службы двигателя переменного тока и другого оборудования
— Более низкие эксплуатационные расходы
— Оборудование в системе, с которым невозможно справиться чрезмерный крутящий момент защищен
Типы частотно-регулируемых приводов
Существует три распространенных частотно-регулируемых привода (VFD), которые обладают как преимуществами, так и недостатками в зависимости от приложения, для которого они используются.Три распространенных конструкции ЧРП включают: инвертор источника тока (CSI), инвертор источника напряжения (VSI) и широтно-импульсную модуляцию (ШИМ). Однако существует четвертый тип частотно-регулируемого привода, называемый векторным приводом потока, который становится все более популярным среди конечных пользователей благодаря своей функции управления с обратной связью. Каждый частотно-регулируемый привод состоит из преобразователя, звена постоянного тока и инвертора, но конструкция каждого из них зависит от привода. Хотя секции каждого частотно-регулируемого привода похожи, они требуют изменения схемы в том, как они подают частоту и напряжение на двигатель.
Инвертор источника тока (CSI)
Инвертор источника тока (CSI) — это тип частотно-регулируемого привода (VFD), который преобразует входящее напряжение переменного тока и изменяет частоту и напряжение, подаваемое на асинхронный двигатель переменного тока. Общая конфигурация этого типа частотно-регулируемого привода аналогична конфигурации других частотно-регулируемых приводов в том, что он состоит из преобразователя, звена постоянного тока и инвертора. В преобразовательной части CSI используются кремниевые выпрямители (SCR), тиристоры с коммутацией затвора (GCT) или симметричные тиристоры с коммутацией затвора (SGCT) для преобразования входящего переменного напряжения в переменное постоянное напряжение.Для поддержания правильного соотношения напряжения и частоты (Вольт / Герц) напряжение должно регулироваться путем правильной последовательности SCR. В звене постоянного тока для этого типа частотно-регулируемого привода используется индуктор для регулирования пульсаций тока и для хранения энергии, используемой двигателем. Инвертор, который отвечает за преобразование постоянного напряжения обратно в синусоидальную форму сигнала переменного тока, состоит из SCRS, тиристоров отключения затвора (GTO) или симметричных тиристоров с коммутацией затвора (SGCT). Эти тиристоры ведут себя как переключатели, которые включаются и выключаются для создания выхода с широтно-импульсной модуляцией (ШИМ), который регулирует частоту и напряжение на двигателе.Частотно-регулируемые приводы CSI регулируют ток, для работы требуется большой внутренний индуктор и нагрузка двигателя. Важным примечанием к конструкциям ЧРП CSI является требование входных и выходных фильтров, которые необходимы из-за высоких гармоник на входе мощности и низкого коэффициента мощности. Чтобы обойти эту проблему, многие производители используют либо входные трансформаторы, либо реакторы и фильтры гармоник в точке общего соединения (электрическая система пользователя, подключенная к приводу), чтобы уменьшить влияние гармоник на систему привода.Из обычных приводных систем с частотно-регулируемым приводом, частотно-регулируемые приводы CSI являются единственным типом приводов, которые имеют возможность рекуперации энергии. Возможность рекуперации энергии означает, что мощность, передаваемая от двигателя обратно к источнику питания, может быть поглощена.
Преимущества CSI
• Возможность рекуперации энергии
• Простая схема
• Надежность (операция ограничения тока)
• Чистая форма кривой тока
Недостатки CSI
• Зубцы двигателя, когда выходная частота ШИМ ниже 6 Гц
• Используемые индукторы большие и дорогие
• Генерация больших гармоник мощности отправляется обратно в источник питания
• Зависит от нагрузки двигателя
• Низкий коэффициент входной мощности
Инвертор источника напряжения (VSI)
Секция преобразователя VSI аналогична секции преобразователя CSI в том, что входящее напряжение переменного тока преобразуется в напряжение постоянного тока.Отличие от секции преобразователя CSI и VSI заключается в том, что VSI использует выпрямитель на диодном мосту для преобразования напряжения переменного тока в напряжение постоянного тока. В звене постоянного тока VSI используются конденсаторы для сглаживания пульсаций постоянного напряжения, а также для хранения энергии для системы привода. Секция инвертора состоит из биполярных транзисторов с изолированным затвором (IGBT), тиристоров с изолированным затвором (IGCT) или транзисторов с инжекционным затвором (IEGT). Эти транзисторы или тиристоры ведут себя как переключатели, которые включаются и выключаются для создания выходного сигнала широтно-импульсной модуляции (ШИМ), который регулирует частоту и напряжение двигателя.
Преимущества VSI
• Простая схема
• Может использоваться в приложениях, требующих нескольких двигателей
• Не зависит от нагрузки
Недостатки VSI
• Генерация больших гармоник мощности в источнике питания
• Зубчатая передача двигателя, когда выходная мощность ШИМ ниже 6 Гц
• Безрегенеративный режим
• Низкий коэффициент мощности
Широтно-импульсная модуляция (ШИМ)
Частотно-регулируемый привод с широтно-импульсной модуляцией (ШИМ) является одним из наиболее часто используемых контроллеров и доказал свою эффективность с двигателями мощностью от 1/2 до 500 л.с.Большинство частотно-регулируемых приводов с ШИМ рассчитаны на работу в трехфазном режиме 230 В или 460 В и обеспечивают выходные частоты в диапазоне 2–400 Гц. Как и VSI VFD, PWM VFD использует выпрямитель на диодном мосту для преобразования входящего переменного напряжения в постоянное. В звене постоянного тока используются конденсаторы большой емкости для устранения пульсаций, возникающих после выпрямителя, и создания стабильного напряжения на шине постоянного тока. Шестиступенчатый инверторный каскад этого драйвера использует IGBT высокой мощности, которые включаются и выключаются для регулирования частоты и напряжения двигателя. Эти транзисторы управляются микропроцессором или ИС двигателя, который контролирует различные аспекты привода, чтобы обеспечить правильную последовательность.В результате на двигатель выводится сигнал синусоидальной формы. Так как же включение и выключение транзистора помогает создать синусоидальный выходной сигнал? Изменяя ширину импульса напряжения, вы получаете среднюю мощность, которая представляет собой напряжение, подаваемое на двигатель. Частота, подаваемая на двигатель, определяется количеством переходов из положительного положения в отрицательное в секунду.
Преимущество ШИМ
• Отсутствие зубчатого зацепления двигателя
• КПД от 92% до 96%
• Превосходный коэффициент входной мощности благодаря фиксированному напряжению шины постоянного тока
• Низкая начальная стоимость
• Может использоваться в приложениях, требующих нескольких двигателей
Недостатки ШИМ
• Безрегенеративный режим
• Высокочастотное переключение может вызвать нагрев двигателя и пробой изоляции
Как выбрать двигатель переменного тока
Чтобы выбрать подходящий двигатель переменного тока для конкретного применения, необходимо определить основные характеристики.Рассчитайте требуемый момент нагрузки и рабочую скорость. Помните, что асинхронные и реверсивные двигатели нельзя регулировать; они требуют редуктора. Если это необходимо, выберите подходящее передаточное число. Затем определите частоту и напряжение питания двигателя.
Преимущества и недостатки
Преимущества двигателя переменного тока
— Низкая стоимость
— Длительный срок службы
— Высокая эффективность и надежность
— Простая конструкция
— Высокий пусковой момент (индукция)
— Отсутствие скольжения (синхронное)
Недостатки двигателя переменного тока
— Частота вызывает проскальзывания вращения (индукция)
— Необходим пусковой выключатель (индукция)
Поиск и устранение неисправностей двигателя переменного тока
ПОЖАЛУЙСТА, ОБРАТИТЕ ВНИМАНИЕ: Техническая помощь в отношении продуктовой линейки двигателей переменного тока, а также всех продуктов, производимых или распространяемых Anaheim Automation, предоставляется бесплатно.Эта помощь предлагается, чтобы помочь клиенту в выборе продуктов Anaheim Automation для конкретного применения. Во всех случаях ответственность за определение пригодности индивидуального двигателя переменного тока для конкретной конструкции системы лежит исключительно на заказчике. Несмотря на то, что прилагаются все усилия, чтобы дать надежные рекомендации относительно линейки продуктов AC Motor, а также других продуктов для управления движением, а также для точного предоставления технических данных и иллюстраций, такие советы и документы предназначены только для справки и могут быть изменены без предварительного уведомления.
Для устранения неполадок в системе двигателя и контроллера переменного тока могут быть предприняты следующие шаги:
Шаг 1. Проверьте запах двигателя. При появлении запаха гари немедленно замените двигатель.
Шаг 2: Проверьте входное напряжение двигателя. Убедитесь, что провода не повреждены и подключен надлежащий источник питания.
Шаг 3. Прислушайтесь к громкой вибрации или скрипу. Такие шумы могут указывать на повреждение или износ подшипников. Если возможно, смажьте подшипники, в противном случае замените двигатель полностью.
Шаг 4: Проверить на перегрев. С помощью сжатого воздуха очистите двигатель от мусора, дайте ему остыть и перезапустите.
Шаг 5: Двигатели переменного тока, которые пытаются запуститься, но выходят из строя, могут быть признаком плохого пускового конденсатора. Проверьте наличие каких-либо признаков утечки масла и замените конденсатор, если это так.
Шаг 6: Убедитесь, что приложение, в котором вращается двигатель, не заблокировано. Для этого отсоедините механизм и попробуйте запустить двигатель самостоятельно.
Сколько стоят изделия с электродвигателями переменного тока?
Двигатель переменного тока может быть разумным экономичным решением для ваших требований. Конструкционные материалы и конструкция двигателя делают системы двигателей переменного тока доступным решением. Двигатель переменного тока работает с вращающимся магнитным полем и не использует щеток. Это позволяет снизить стоимость двигателя и исключает компонент, который может со временем изнашиваться. Для работы двигателей переменного тока не требуется драйвер.Это экономит начальные затраты на установку. Сегодняшние производственные процессы делают производство двигателей переменного тока проще и быстрее, чем когда-либо. Статор изготовлен из тонких пластин, которые можно прессовать или штамповать на станке с ЧПУ. Многие другие детали можно быстро изготовить и усовершенствовать, сэкономив время и деньги! Anaheim Automation предлагает на выбор полную линейку продукции для двигателей переменного тока.
Физические свойства двигателя переменного тока
Обычно двигатель переменного тока состоит из двух основных компонентов: статора и ротора.Статор — это неподвижная часть двигателя, состоящая из нескольких тонких пластин, намотанных изолированным проводом, образующих сердечник.
Ротор соединен с выходным валом изнутри. Наиболее распространенным типом ротора, используемого в двигателях переменного тока, является ротор с короткозамкнутым ротором, названный в честь его сходства с колесами для упражнений на грызунах.
Статор устанавливается внутри корпуса двигателя, ротор установлен внутри, а между ними имеется зазор, отделяющий их от соприкосновения. Кожух представляет собой корпус двигателя, содержащий два подшипниковых узла.
Формулы для двигателя переменного тока
Синхронная скорость:
Частота:
Количество полюсов:
Мощность в лошадиных силах:
04
8 ДвигательГлоссарий двигателей переменного тока
Двигатель переменного тока — Электродвигатель, приводимый в действие переменным током, а не постоянным.
Переменный ток — Электрический заряд, который часто меняет направление (противоположно постоянному току, с зарядом только в одном направлении).
Центробежный переключатель — Электрический переключатель, который регулирует скорость вращения вала, работая за счет центробежной силы, создаваемой самим валом.
Передаточное число — Передаточное число, при котором скорость двигателя уменьшается редуктором. Скорость на выходном валу равна 1 передаточному числу x скорость двигателя.
Инвертор — Устройство, преобразующее постоянный ток в переменный. Реверс выпрямителя.
Асинхронный двигатель — Может упоминаться как асинхронный двигатель; Тип двигателя переменного тока, в котором электромагнитная индукция питает ротор. Для создания крутящего момента требуется скольжение.
Скорость холостого хода — Обычно ниже синхронной скорости, это скорость, когда двигатель не несет нагрузки.
Номинальная скорость — Скорость двигателя при номинальной выходной мощности.Обычно самая востребованная скорость.
Выпрямитель — Устройство, преобразующее переменный ток в постоянный в двигателе. Они могут использоваться в качестве компонента источника питания или могут обнаруживать радиосигналы. Обычно выпрямители могут состоять из твердотельных диодов, ртутных дуговых клапанов или других веществ. Реверс инвертора.
Выпрямление — Процесс преобразования переменного тока в постоянный с помощью выпрямителя в двигателе переменного тока.
Асинхронный двигатель с расщепленной фазой — Двигатели, которые могут создавать больший пусковой крутящий момент за счет использования центробежного переключателя в сочетании со специальной пусковой обмоткой.
Момент остановки — Максимальный крутящий момент, при котором двигатель может работать, при определенном напряжении и частоте. Превышение этого количества приведет к остановке двигателя.
Пусковой крутящий момент — крутящий момент, который мгновенно создается при запуске двигателя. Двигатель не будет работать, если нагрузка трения превышает крутящий момент.
Статический момент трения — Когда двигатель останавливается, например, тормозом, это выходной крутящий момент, необходимый для удержания нагрузки при остановке двигателя.
Синхронный двигатель — В отличие от асинхронного двигателя, он может создавать крутящий момент с синхронной скоростью без скольжения.
Синхронная скорость — Обозначается скоростью в минуту, это внутренний фактор, определяемый количеством полюсов и частотой сети.
Привод с регулируемой скоростью — Оборудование, используемое для управления частотой электроэнергии, подаваемой на двигатель переменного тока, с целью управления его скоростью вращения.
Блок-схема для систем, в которых используется двигатель переменного тока
Срок службы двигателя переменного тока
Двигатели переменного токаAnaheim Automation обычно имеют срок службы около 10 000 часов работы, при условии, что двигатели работают в надлежащих условиях и в соответствии со спецификациями.
Требуемое обслуживание двигателя переменного тока
Профилактическое обслуживание — ключ к долговечной системе электродвигателя переменного тока.Следует проводить плановую проверку. Всегда проверяйте двигатель переменного тока на предмет загрязнения и коррозии. Грязь и мусор могут закупорить воздушные каналы и уменьшить поток воздуха, что в конечном итоге приведет к сокращению срока службы изоляции и возможному отказу двигателя. Если мусор не виден явно, убедитесь, что поток воздуха постоянный и не слабый. Это также может указывать на засорение. Во влажной, влажной или влажной среде проверьте клеммы в распределительной коробке на предмет коррозии и при необходимости отремонтируйте.
Прислушайтесь к чрезмерному шуму или вибрации и почувствуйте чрезмерное нагревание.Это может указывать на необходимость смазки подшипников. Примечание: Будьте осторожны при смазке подшипников, так как чрезмерная смазка может привести к грязи и маслам, забивающим воздушный поток. Обязательно найдите и удалите источник тепла для двигателя, чтобы избежать отказа системы.
Примечание: Будьте осторожны при смазке подшипников, так как чрезмерная смазка может привести к загрязнению и засорению потоком воздуха маслом. Обязательно найдите и удалите источник тепла для двигателя, чтобы избежать отказа системы.
Электропроводка двигателя переменного тока
Следующая информация предназначена в качестве общего руководства для электромонтажа линейки двигателей переменного тока Anaheim Automation. Имейте в виду, что при прокладке силовой и сигнальной проводки на машине или системе излучаемый шум от близлежащих реле, трансформаторов и других электронных устройств может индуцироваться в двигателе переменного тока и сигналах энкодера, каналах ввода / вывода и других чувствительных низковольтных устройствах. сигналы. Это может вызвать сбои в системе.
ПРЕДУПРЕЖДЕНИЕ — В системе двигателя переменного тока может присутствовать опасное напряжение, способное вызвать травму или смерть. Соблюдайте особую осторожность при обращении, подключении, тестировании и регулировке во время установки, настройки, настройки и эксплуатации. Не делайте чрезмерных корректировок или изменений в параметрах системы двигателя переменного тока, которые могут вызвать механическую вибрацию и привести к поломке и / или потерям. После того, как система электродвигателя переменного тока подключена, не запускайте ее путем прямого включения / выключения источника питания. Частое включение / выключение питания приведет к быстрому старению компонентов системы, что сократит срок службы системы электродвигателя переменного тока.
Строго соблюдайте следующие правила:
• Следуйте схеме подключения к каждому двигателю переменного тока и / или контроллеру
• Прокладывайте силовые кабели высокого напряжения отдельно от силовых кабелей низкого напряжения
• Отделите входную силовую проводку и силовые кабели двигателя переменного тока от проводки управления и кабелей обратной связи двигателя. Сохраняйте это разделение на всем протяжении провода.
• Используйте экранированный кабель для силовой проводки и обеспечьте заземленный зажим на 360 градусов к стене корпуса.Оставьте на вспомогательной панели место для изгибов проводов.
• Сделайте все кабельные трассы как можно короче.
• Обеспечьте достаточный воздушный поток
• Сохраняйте окружающую среду как можно более чистой
ПРИМЕЧАНИЕ: Кабели заводского изготовления рекомендуются для использования в наших системах двигателей переменного тока. Эти кабели приобретаются отдельно и предназначены для минимизации электромагнитных помех. Эти кабели рекомендуется использовать вместо кабелей, изготовленных заказчиком, чтобы оптимизировать работу системы и обеспечить дополнительную безопасность для системы электродвигателя переменного тока, а также для пользователя.
ПРЕДУПРЕЖДЕНИЕ — Во избежание поражения электрическим током выполните все монтажные и электромонтажные работы двигателя переменного тока перед подачей питания. После подачи питания на соединительные клеммы может присутствовать напряжение.
Крепление двигателя переменного тока
Следующая информация предназначена в качестве общего руководства по установке и монтажу системы электродвигателя переменного тока. ПРЕДУПРЕЖДЕНИЕ — В системе двигателя переменного тока может присутствовать опасное напряжение, способное вызвать травму или смерть.Соблюдайте особую осторожность при обращении, тестировании и регулировке во время установки, настройки и эксплуатации. При установке и монтаже очень важно учитывать проводку двигателя переменного тока. Субпанели, устанавливаемые внутри корпуса для монтажа компонентов системы, должны иметь плоскую жесткую поверхность, защищенную от ударов, вибрации, влаги, масла, паров или пыли. Помните, что двигатель переменного тока выделяет тепло во время работы; поэтому при проектировании компоновки системы следует учитывать рассеивание тепла.Размер корпуса не должен превышать максимально допустимую температуру окружающей среды. Рекомендуется устанавливать электродвигатель переменного тока в положение, обеспечивающее достаточный воздушный поток. Электродвигатель переменного тока должен быть устойчиво закреплен и надежно закреплен.
ПРИМЕЧАНИЕ: Между электродвигателем переменного тока и любыми другими устройствами, установленными в системе / электрической панели или шкафу, должно быть расстояние не менее 10 мм.
Чтобы соответствовать требованиям UL и CE, система электродвигателя переменного тока должна быть заземлена в заземленном проводящем корпусе, обеспечивающем защиту, как определено в стандарте EN 60529 (IEC 529) до IP55, таким образом, чтобы они были недоступны для оператора или неквалифицированного человека. .Как и любую движущуюся часть системы, двигатель переменного тока следует держать вне досягаемости оператора. Корпус NEMA 4X превосходит эти требования, обеспечивая степень защиты IP66. Чтобы улучшить соединение между шиной питания и дополнительной панелью, сконструируйте дополнительную панель из оцинкованной (не содержащей краски) стали. Кроме того, настоятельно рекомендуется защитить систему электродвигателя переменного тока от электрических помех. Шум от сигнальных проводов может вызвать механическую вибрацию и неисправности.
Экологические аспекты двигателя переменного тока
Следующие меры по охране окружающей среды и безопасности должны соблюдаться на всех этапах эксплуатации, обслуживания и ремонта системы электродвигателя переменного тока.Несоблюдение этих мер предосторожности нарушает стандарты безопасности при проектировании, производстве и предполагаемом использовании двигателя переменного тока. Обратите внимание, что даже правильно построенная система электродвигателя переменного тока, неправильно установленная и эксплуатируемая, может быть опасной. Пользователь должен соблюдать меры предосторожности в отношении нагрузки и условий эксплуатации. В конечном итоге заказчик несет ответственность за правильный выбор, установку и работу двигателя переменного тока и / или регулятора скорости.
Атмосфера, в которой используется двигатель переменного тока, должна способствовать соблюдению общих правил работы с электрическим / электронным оборудованием.Не эксплуатируйте систему электродвигателя переменного тока в присутствии легковоспламеняющихся газов, пыли, масла, пара или влаги. При использовании вне помещений двигатель переменного тока должен быть защищен от атмосферных воздействий соответствующей крышкой, обеспечивая при этом достаточный поток воздуха и охлаждение. Влага может вызвать опасность поражения электрическим током и / или вызвать поломку системы. Следует уделять должное внимание недопущению попадания любых жидкостей и паров. Свяжитесь с заводом-изготовителем, если ваше приложение требует определенных степеней защиты IP. Разумно устанавливать двигатель переменного тока в среде, свободной от конденсации, электрических шумов, вибрации и ударов.
Кроме того, предпочтительно работать с системой электродвигателя переменного тока в нестатической защитной среде. Открытые цепи всегда должны быть надлежащим образом ограждены и / или закрыты для предотвращения несанкционированного контакта человека с цепями под напряжением. Никакие работы не должны выполняться при включенном питании.
НЕ подключайте и не отключайте питание при включенном питании. После выключения питания подождите не менее 5 минут, прежде чем проводить инспекционные работы в системе двигателя переменного тока, потому что даже после отключения питания в конденсаторах внутренней цепи системы двигателя переменного тока будет оставаться некоторая электрическая энергия.
Спланируйте установку двигателя переменного тока в конструкции системы, свободной от мусора, такого как металлический мусор от резки, сверления, нарезания резьбы и сварки, или любого другого постороннего материала, который может контактировать с схемами системы. Если не предотвратить попадание мусора в систему двигателя переменного тока, это может привести к повреждению и / или поражению электрическим током.
История двигателя переменного тока
Изобретение двигателя переменного тока Асинхронные двигатели
переменного тока используются в отрасли уже более 20 лет.Идея двигателя переменного тока возникла у Николы Теслы в 1880-х годах. Никола Тесла заявил, что двигателям не нужны щетки для переключения ротора. Он сказал, что они могут быть вызваны вращающимся магнитным полем. Никола Тесла обнаружил использование переменного тока, который индуцирует вращающиеся магнитные поля. Тесла подал патент США номер 416194 на работу над двигателем переменного тока. Этот тип двигателя сегодня мы называем асинхронным двигателем переменного тока.
Развитие двигателя переменного тока
Двигатель переменного тока сделал себе имя благодаря простой конструкции, простоте использования, прочной конструкции и рентабельности для множества различных применений.Достижения в области технологий позволили производителям развить идею Telsa и обеспечили большую гибкость в регулировании скорости асинхронного двигателя переменного тока. От простого фазового управления до более надежных систем с обратной связью, использующих векторно-ориентированное управление полем; Двигатель переменного тока усовершенствовался за последние сто двадцать лет.
Принадлежности для двигателей переменного тока
Для двигателей переменного тока существует широкий выбор принадлежностей. Доступные аксессуары включают тормоз, сцепление, вентилятор, разъем и кабели. Дополнительные сведения и варианты см. На странице «Аксессуары» Anaheim Automation.
Тормоза двигателя переменного тока — это система 24 В постоянного тока. Эти тормоза идеально подходят для любых удерживающих устройств, которые вы можете использовать с электродвигателем переменного тока. Тормоза электродвигателя переменного тока имеют низковольтную конструкцию для приложений, которые подвержены разряду батареи, потере напряжения или длинной проводке.
Муфта двигателя переменного тока используется для управления крутящим моментом, прилагаемым к нагрузке. Муфту двигателя переменного тока также можно использовать для увеличения скорости нагрузки с высоким моментом инерции.Муфты идеально подходят для использования с электродвигателем переменного тока, когда вы хотите точно контролировать крутящий момент или медленно прикладывать мощность. Муфты электродвигателя переменного тока также помогают предотвратить резкие скачки тока.
Вентиляторы двигателя переменного тока используются для охлаждения двигателей. Обычно они не встречаются в небольших двигателях, потому что они не нужны, но чаще встречаются в более крупных асинхронных двигателях переменного тока из-за тепловыделения. Есть два типа вентиляторов, которые используются для двигателя переменного тока. Типы бывают внутренние и внешние вентиляторы. Вентиляторы электродвигателей переменного тока идеально подходят для использования, когда возникает проблема перегрева.
Кабели двигателя переменного тока могут быть изготовлены по индивидуальному заказу с поставляемым разъемом двигателя переменного тока в соответствии с заданными спецификациями. Кабели также можно приобрести в компании Anaheim Automation.
Если двигатели переменного тока не идеальны для вашего применения, вы можете рассмотреть бесщеточные двигатели постоянного тока, щеточные двигатели постоянного тока, сервоприводы или шаговые двигатели и их совместимые драйверы / контроллеры. Наряду с двигателями переменного тока Anaheim Automation предлагает коробки передач и регуляторы скорости. Дополнительные продукты Anaheim Automation предлагает: энкодеры, HMI, муфты, кабели и соединители, линейные направляющие и столы X-Y.
Настройка двигателя переменного тока
Anaheim Automation была основана в 1966 году как производитель систем управления перемещением «под ключ». Его акцент на исследованиях и разработках обеспечил постоянное внедрение передовых продуктов управления движением, таких как линейка продуктов AC Motor. Сегодня Anaheim Automation занимает высокое место среди ведущих производителей и дистрибьюторов продукции для управления движением, и это положение усиливается ее отличной репутацией в области качественной продукции по конкурентоспособным ценам.Линия продуктов AC Motor не является исключением из целей компании.
Anaheim Automation предлагает широкий выбор стандартных двигателей переменного тока. Иногда OEM-заказчики со средним и большим количеством требований предпочитают иметь двигатель переменного тока, который настраивается или модифицируется в соответствии с их точными проектными требованиями. Иногда настройка настолько проста, как модификация вала, тормоз, масляное уплотнение для степени защиты IP65, установочные размеры, цвета проводов или этикетка. В других случаях заказчик может потребовать, чтобы двигатель переменного тока соответствовал идеальным характеристикам, таким как скорость, крутящий момент и / или напряжение.Для получения более подробной информации обсудите требования к вашему приложению с инженером по автоматизации в Анахайме.
Двигатель переменного тока Anaheim Automation
Инженерыценят то, что линейка двигателей переменного тока Anaheim Automation может удовлетворить их стремление к творчеству, гибкости и эффективности системы. Покупатели ценят простоту «универсального магазина» и экономию затрат на индивидуальную конструкцию двигателя переменного тока, в то время как инженеры довольны тем, что Anaheim Automation уделяет особое внимание их конкретным системным требованиям.
Стандартная линейка двигателей переменного тока Anaheim Automation представляет собой экономичное решение, поскольку они известны своей прочной конструкцией и отличными характеристиками. Значительный рост продаж компании явился результатом целенаправленного проектирования, дружелюбного обслуживания клиентов и профессиональной поддержки приложений, что часто превосходит ожидания клиентов в отношении выполнения их индивидуальных требований. Хотя значительная часть продаж двигателей переменного тока Anaheim Automation связана с особыми, индивидуальными требованиями или требованиями частной марки, компания гордится своей стандартной базой складских запасов, расположенной в Анахайме, Калифорния, США.Чтобы сделать индивидуальную настройку двигателя переменного тока доступной, требуется минимальное количество и / или плата за непериодическое проектирование (NRE). Свяжитесь с заводом-изготовителем для получения подробной информации, если вам потребуется специальный двигатель переменного тока в конструкции вашей системы управления движением.
Все продажи индивидуализированного или модифицированного двигателя переменного тока не подлежат отмене и возврату, и для каждого запроса клиент должен подписать соглашение NCNR. Все продажи, включая индивидуальный двигатель переменного тока, осуществляются в соответствии со стандартными положениями и условиями Anaheim Automation и заменяют любые другие явно выраженные или подразумеваемые условия, включая, помимо прочего, любые подразумеваемые гарантии.
Anaheim Automation заказывает линейку продуктов AC Motor разнообразно: компании, эксплуатирующие или проектирующие автоматизированное оборудование или процессы, которые включают в себя пищевую, косметическую или медицинскую упаковку, маркировку или требования защиты от несанкционированного вскрытия, сборку, конвейер, погрузочно-разгрузочные работы, робототехнику, специальную съемку и т. Д. проекционные эффекты, медицинская диагностика, устройства контроля и безопасности, управление потоком насосов, изготовление металла (станки с ЧПУ) и модернизация оборудования. Многие OEM-заказчики просят, чтобы мы использовали двигатели переменного тока «частной торговой марки», чтобы их клиенты оставались верными им при обслуживании, замене и ремонте.
Тест двигателя переменного тока
Q: Какие три основных типа электродвигателей переменного тока предлагает Anaheim Automation?
A: Индукционные, синхронные и промышленные
Q: Каковы компоненты частотно-регулируемого привода?
A: Частотно-регулируемый привод включает двигатель переменного тока, контроллер и интерфейс оператора.
В: Какой двигатель обычно используется в частотно-регулируемом приводе?
A: Трехфазный асинхронный двигатель
Q: Каковы основные компоненты двигателя переменного тока?
A: Стационарный статор, который находится снаружи и имеет катушки, на которые подается переменный ток, и внутренний ротор, прикрепленный к выходному валу.
В: Почему необходимо подключать конденсатор к асинхронному двигателю переменного тока?
A: Любой двигатель ACP-M, считающийся однофазным асинхронным двигателем, является двигателем с конденсаторным приводом. Следовательно, для его запуска необходимо создать вращающееся магнитное поле. Конденсаторы создают источник питания с фазовым сдвигом, который необходим для создания необходимого вращательного магнитного поля. С другой стороны, трехфазные двигатели всегда подают питание с разными фазами, поэтому им не нужны конденсаторы.
В: Что подразумевается под реверсивным двигателем, рассчитанным на 30 минут?
A: Двигатель рассчитан на оптимальную работу не более 30 минут. Если работать постоянно, двигатель перегорит.
Часто задаваемые вопросы по двигателям переменного тока:
В: Почему следует выбрать трехфазный двигатель вместо однофазного?
A: Однофазные двигатели переменного тока мощностью более 10 л.с. (7,5 кВт) обычно не так распространены. Трехфазные двигатели менее вибрируют, что продлевает срок их службы по сравнению с однофазными двигателями той же мощности, используемыми в тех же условиях.
В: В чем разница между частотно-регулируемым приводом и частотно-регулируемым приводом?
A: Приводы с переменной частотой (VFD) обычно относятся только к приводам переменного тока, в то время как приводы с регулируемой скоростью (VSD) могут относиться либо к приводу переменного тока, либо к приводу постоянного тока. VFD управляет скоростью двигателя переменного тока, изменяя частоту двигателя. С другой стороны, преобразователи частоты изменяют напряжение для управления двигателем постоянного тока.
Q: Могу ли я изменить направление вращения асинхронного двигателя переменного тока, если я подключил его, как показано в каталоге, например, ACP-M-4IK25N-AU?
A: Да, можно.Однако перед переключением направления убедитесь, что двигатель полностью остановлен. Если требуется немедленное реверсирование, реверсивный двигатель лучше подходит для данной области применения; например ACP-M-4RK25N-AU.
В: Можно ли изменить скорость асинхронных двигателей переменного тока и реверсивных двигателей?
A: Частота источника питания определяет скорость однофазных (переменного тока) асинхронных и реверсивных двигателей. Если ваше приложение требует изменения скорости, рекомендуется использовать двигатель с регулировкой скорости.
Q: Будет ли временное хранение моего асинхронного двигателя переменного тока при температуре от 0 ° F до -20 ° F создавать какие-либо проблемы?
A: Резкие перепады температуры могут привести к конденсации влаги внутри двигателя. В этом случае компоненты могут заржаветь, что значительно сократит срок службы. Постарайтесь избежать образования конденсата.
В: Это плохо, если мой асинхронный двигатель переменного тока сильно нагревается?
A: При преобразовании электрической энергии во вращательное движение внутри двигателя выделяется тепло, что делает его горячим.