
Частотник для трехфазного электродвигателя-принцип работы
Создание трёхфазного асинхронного электродвигателя пришлось на конец XIX века. С тех пор, никакие промышленные работы не являются возможными без его использования. Наиболее значимый момент в рабочем процессе – плавный пуск и торможение двигателя. Это требование в полной мере выполняется при помощи частотного преобразователя.
Существует несколько вариантов названий частотника для трёхфазного электродвигателя. В том числе, он может называться:
- Инвертором;
- Преобразователем частоты переменного тока;
- Частотным преобразователем;
- Частотно регулируемым приводом.
С помощью инвертора осуществляется регуляция вращательной скорости асинхронного электродвигателя, предназначенного для преобразования электрической энергии в механическую. Осуществляемое при этом движение можно трансформировать в движение другого типа.
Специально разработанная схема частотного преобразователя позволяет доводить КПД двигателя до уровня в 98%.
Наиболее значимо использование преобразователя в конструкции электрического двигателя большой мощности. Частотник позволяет осуществлять изменения пусковых токов и задавать для них требуемую величину.
Принцип работы частотного преобразователя
Использование ручного управления пускового тока чревато излишними энергозатратами и уменьшением срока эксплуатации электрического двигателя. При отсутствии преобразователя также наблюдается превышение номинального значения напряжения в несколько раз. Из-за работы в таком режиме, также наблюдается негативное влияние.
Кроме того, частотный преобразователь обеспечивает плавность управления функционированием двигателя, ориентируясь на балансировку значений напряжения и частоты, и снижает энергопотребление вдвое.
Весь приведённый перечень положительных моментов возможен благодаря принципу двойного преобразования напряжения. Действует он следующим образом:
- Сетевое напряжение регулируется через выпрямление и фильтрование в звене прямого тока.

- Выполнение электронного управления, которое формирует определённую частоту, в соответствии с предварительно обозначенным режимом, и трёхфазное напряжение.
- Происходит продуцирование прямоугольных импульсов с последующей корректировкой амплитуды при помощи обмотки статора.

Как правильно подобрать преобразователь частот
Наиболее значимо при покупке частотника – не жалеть денег. В случае с преобразователем, дешёвый всегда означает малофункциональный, а это делает покупку бесполезной.
Также следует обратить внимание на тип управления преобразователя:
Высокоточная установка величины тока.
Рабочий режим ограничен заданным выходным соотношением частоты и напряжения. Данный тип управления уместен только для бытовых приборов простейшего типа.
Далее следует обратить внимание на мощность преобразователя частоты. Тут всё просто: чем больше, тем лучше.
Питающая сеть должна обеспечивать достаточно широкий диапазон напряжений.
 Это снижает риск поломки при резких скачках. Чрезмерно высокое напряжение может спровоцировать взрыв конденсаторов.
Это снижает риск поломки при резких скачках. Чрезмерно высокое напряжение может спровоцировать взрыв конденсаторов.Показатели частоты должны удовлетворять производственным потребностям. Их нижний порог определяет широту возможностей для управления приводной скорости. Максимальный частотный диапазон возможен только при векторном управлении.
Число входящих/выходящих управляющих разъёмов должно быть немного больше минимально необходимого. Но это, конечно, отражается на повышении цены и возникновении затруднений при установке устройства.
Наконец, требуется обратить внимание на совпадение характеристик управляющей шины и параметров частотника. Это определяется по соответствию числа разъёмов.
Важно отметить способность переносить перегрузки. Запас мощности преобразователя частоты должен на 15% превосходить мощность двигателя.
Комплектация регулируемого привода
Частотный преобразователь формируется из трёх компонентов:
- Управляемый, либо неуправляемый выпрямитель, отвечающий за формирование напряжения ПТ (постоянного тока), поступающего от питания.
- Фильтр (в виде конденсатора), осуществляющий дополнительное сглаживание напряжения.
- Инвертор, моделирующий напряжение нужной частоты.

Самостоятельное подключение преобразователя
Перед тем, как приступать к подключению устройства следует воспользоваться обесточивающим автоматом, он обеспечит отключение всей системы в случае короткого замыкания на любой из фаз.
Существует две схемы соединения электродвигателя с частотным преобразователем:
- “Треугольник”.
Схема актуальна, если требуется управлять однофазным приводом. Уровень мощности преобразователя в схеме при этом составляет до трёх киловатт, а мощность не теряется.
- “Звезда”.
Способ, подходящий для подключения клемм трёхфазных частотников, питаемых промышленными трёхфазными сетями.
На рисунке схема подключения частотника 8400 Vector
Для ограничения пускового тока и снижения пускового момента при запуске электрического двигателя по мощности превосходящего 5 кВт, применяется переключение “звезда-треугольник”.
Когда на статор пускается напряжение, то фигурирует подключение устройства по типу “звезда”. Как только значение скорости двигателя начинает соответствовать номинальному, поступление питания осуществляется по схеме “треугольник”. Но этот приём используется, только когда технические возможности позволяют подключаться по двум схемам.
В объединённой схеме “звезды” и “треугольника” наблюдаются резкие скачки токов. При переходе на второй тип подключения показания по вращательной скорости значительно уменьшаются. Для восстановления прежнего режима работы и частоты оборотов следует осуществить увеличение силы тока.
Наиболее активно применяются частотники в конструкции электрического двигателя с уровнем мощности 0,4 – 7,5 кВт.
Сборка преобразователя частот своими руками
Одновременно с промышленным производством частотных преобразователей, остаётся актуальной сборка подобного устройства своими руками. Особенно этому способствует относительная простота процесса. В результате работы инвертора производится преобразование одной фазы в три.
Применение в бытовых условиях электрических двигателей, имеющих в комплектации подобное устройство, не вызывает никаких дополнительных затруднений. Поэтому можно смело браться за дело.
На рисунке структурная схема частотных преобразователей со звеном постоянного тока.
Схемы частотного преобразователя, используемые при сборке, состоят из выпрямительного блока, фильтрующих элементов (отвечающих за отсечение переменной составляющей тока и конструируемых из IGBT-транзисторов). По стоимости покупка отдельных компонентов преобразователя и выполнение сборки своими руками обходится дешевле, чем приобретение готового устройства.
Применять самосборные частотные преобразователи можно в электродвигателях имеющих мощность 0,1 – 0,75 кВт.
В то же время, современные заводские частотники имеют расширенную функциональность, усовершенствованные алгоритмы и улучшенный контроль безопасности рабочего процесса ввиду того, что при их производстве используются микроконтроллеры.
Сферы применения преобразователей:
- Машиностроение;
- Текстильная промышленность;
- Топливно-энергетические комплексы;
- Скважинные и канализационные насосы;
- Автоматизация управления технологическим процессом.
Стоимость электродвигателей находится в прямой зависимости от того, есть ли в его комплектации преобразователей.
Самодельный частотный преобразователь 220-380V собственной сборки
Watch this video on YouTube
Частотный преобразователь: полный обзор функций частотника
Преобразователем частоты именуют статическую преобразовательную конструкцию, используемую с целью регуляции скорости вращения асинхронного электрического двигателя. Устройства данного типа, работающие на переменном токе, гораздо проще сконструированы, и их легче эксплуатировать в сравнении с двигателями, использующими постоянный ток. Это способствует популяризации асинхронного электродвигателя.
Преобразователь частоты обеспечивает плавность пуска и остановки электрического двигателя. Наиболее уместно его использование для крупного электродвигателя с большой мощностью.
Наиболее уместно его использование для крупного электродвигателя с большой мощностью.
Кроме частотного преобразователя для регуляции вращательной скорости могут применяться: механические вариаторы, гидравлические муфты и т. д. Однако, такие компоненты имеют ряд недостатков:
- Низкий уровень качества;
- Сложная конструкция;
- Высокая себестоимость;
- Узкий диапазон вариантов рабочей частоты.
Частотный преобразователь для электродвигателя, регулирующий уровень напряжения питающего тока и его частоту, по данным пунктам явно отличается в лучшую сторону. Как результат, КПД преобразования стремится к ста процентам при достаточно низкой угрозе поломок.
Классификация преобразователей частоты
Согласно типу питающего напряжения необходимого для работы частотного преобразователя, существуют устройства следующих групп:
- Однофазные;
- Трёхфазные;
- Высоковольтные.
Преобразователь может быть подключён к электродвигателям следующих типов:
- Однофазным, имеющим расщеплённые полюса, и однофазным конденсаторным;
- Трёхфазным, асинхронного типа, работающим с использованием переменного тока.
- Оснащённых постоянными магнитами.

Существует несколько сфер использования частотного преобразователя:
- Общепромышленная;
- Векторное преобразование частоты;
- Механизмы с насосно-вентиляторным типом нагрузки;
- Преобразователи частоты в кранах и иных подъёмных механизмах;
Также существуют взрывозащищённые преобразователи, ориентированные на тяжёлые условия эксплуатации, и децентрализованные модели, которые устанавливаются прямо на базе асинхронного электродвигателя.
Особенности устройства преобразователя частоты
Типичная схема, свойственная частотному преобразователю, основана на построении двойного преобразования. Это означает, что устройство состоит из:
- Звена постоянного тока, также сформированного из неуправляемого выпрямителя и фильтра;
- Силового импульсного инвентора;
- Системы управления.
Первый компонент отвечает за преобразование переменного сетевого напряжения в постоянное. После неуправляемого выпрямителя движения тока происходит через транзисторные ключи, обеспечивающие подключение обмотки асинхронного двигателя к положительным и отрицательным выводам звена постоянного тока. Эти транзисторы вместе называются силовым импульсным инвентором. Трёхфазный инвентор, состоящий из шести, осуществляет преобразование выпрямленного напряжения соответственно в трёхфазное переменное значение необходимой частоты и амплитуды, передаваемое на обмотку статора электрического двигателя.
После неуправляемого выпрямителя движения тока происходит через транзисторные ключи, обеспечивающие подключение обмотки асинхронного двигателя к положительным и отрицательным выводам звена постоянного тока. Эти транзисторы вместе называются силовым импульсным инвентором. Трёхфазный инвентор, состоящий из шести, осуществляет преобразование выпрямленного напряжения соответственно в трёхфазное переменное значение необходимой частоты и амплитуды, передаваемое на обмотку статора электрического двигателя.
Для компоновки импульсного инвентора предпочтительно использование IGBT-транзисторов (биполярные, имеют затвор), поскольку они являются обладателями достаточно высокой частоты переключения. Это позволяет формировать на выходе синусоидальный сигнал с минимальными искажениями.
Принципы функционирования частотного преобразователя
Регуляция пускового тока может осуществляться вручную, но это увеличивает затраты электропотребления и снижает срок эксплуатации асинхронного двигателя. Обычно без преобразователя напряжения показания до семи раз превышают значение номинала. Определённо, это не самые лучшие условия для эксплуатации.
Обычно без преобразователя напряжения показания до семи раз превышают значение номинала. Определённо, это не самые лучшие условия для эксплуатации.
Принцип работы преобразователей частоты связан со спецификой действия асинхронного электродвигателя. У двигателя подобного вида наблюдается зависимость между вращательной частотой магнитного поля и частотой напряжения питающего тока. В данном моменте и заключается смысл методики частотного управления. Изменяемая преобразователем входная частота напряжения отвечает за регуляцию частоты вращения. Таким образом, диапазон значений выходного напряжения весьма широк.
По принципу работы силового элемента частотные преобразователи можно отнести к следующим категориям:
- Конструкции, имеющие выраженный промежуточный неуправляемый выпрямитель.
- Конструкции, имеющие непосредственную связь (без промежуточного звена).
Частотники второго типа появились гораздо раньше, в них силовой компонент представлен управляемым выпрямителем, сконструированным из тиристоров. Формирование выходного сигнала происходит при поочерёдном отпирании тиристоров управляющим узлом. На сегодняшний день такие приборы потеряли свою актуальность.
Формирование выходного сигнала происходит при поочерёдном отпирании тиристоров управляющим узлом. На сегодняшний день такие приборы потеряли свою актуальность.
Что касается частотного преобразователя первого типа, то он примечателен тем, что его можно запитать через внешнее звено постоянного тока. Сам частотник при этом защищается предохранителем быстрого действия. Однако, это делает нежелательным применение контакторов, поскольку данная разновидность коммутации провоцирует возникновение повышенного зарядного тока и выгорание предохранителей.
Работа частотного преобразователя связана с принципом двойного преобразования напряжения:
- Регуляция сетевого напряжения через выпрямление и фильтрование (для этого используются конденсаторные системы).
- Задействуется электронное управление, устанавливающее заблаговременно выбранную частоту тока.
- Происходит образование прямоугольных импульсов, корректируемых при помощи обмотки статора. В результате они преобразуются в синусоиду.

Содержание двух принципов управления преобразователем частоты
Существует диада основных принципов регуляции частотных преобразователей:
- Принцип скалярного управления.
Преобразователи частоты управляемые по данному принципу имеют низкую себестоимость. Часто применяются в приводах устройств, где степень частоты вращения может регулироваться в соотношении 1:40. Это позволяет адекватно управлять работой насосов, компрессоров, вентиляторов. К тому скалярный метод позволяет осуществлять регуляцию работы сразу нескольких электродвигателей.
- Векторный принцип.
Имеют максимальное совпадение характеристик асинхронных электроприводов с параметрами приводов ПТ. Этому способствует разделение регуляционных каналов, связанных с потокосцеплением и вращательной скоростью асинхронного двигателя. Частотники, работающие в рамках данной системы управления, более дорогие по цене и применяются в устройствах требующих высокоточного регулирования скорости: станках, лифтах, кранах.
Как и где следует применять частотный преобразователь
Частотный преобразователь позволяет регулировать скорость действия следующих механизмов:
- Насосов, перекачивающих горячую или холодную воду по системе водоснабжения и обогрева;
- Вспомогательных агрегатов котельных, тепловых электростанций, ТЭЦ и т.д.;
- Дробилках, мельницах, мешалках;
- Песковых и пульповых насосов, используемых на обогатительных фабриках;
- Лифтовых установок;
- Разнотипных центрифуг;
- Производственных линий, создающих ленточные материалы;
- Кранового и эскалаторного оборудования;
- Устройств, обеспечивающих силовые манипуляции;
- Приводов на буровых станках, специализированных приборов и так далее.
Наиболее очевидна польза частотных преобразователей с точки зрения экономии:
- Оптимальный уровень КПД позволяет вдвое экономить электроэнергию.
- Количество и качество конечного продукта в производственной значительно возрастает.
- Комплектующие механизма меньше изнашиваются;
- Общая длительность эксплуатации оборудования также возрастает.

Как итог, частотный преобразователь отвечает за эффективность и продуктивность функционирования механизмов.
Тонкости выбора частотного преобразователя
Основным значимым параметром, при выборе той или иной модели преобразователя частоты, на сегодняшний день является именно его стоимость. Это обусловлено тем, что только для дорогого устройства характерна максимальная функциональность. Но это не отменяет наличие специфических требований в зависимости от того, для механизма какой категории подбирается преобразователь, поэтому необходимо учитывать:
- Разновидность и данные по мощности асинхронного электродвигателя, к которому подключается частотник;
- Насколько точно и в каком диапазоне можно регулировать скорость;
- Насколько точно осуществляется поддержание момента и скорости вращения на валу электрического двигателя;
- Соответствие конструкции (формы, размера, пульта управления и так далее) индивидуальным требованиям.

Обязательно также обратить внимание на значение мощности асинхронного электрического двигателя, с которым будет взаимодействовать преобразователь частоты. Если один из параметров (например: величина пускового момента, затрачиваемое на разгон или торможение время) должен соответствовать каким-то особым требованиям, то нужно выбрать устройство более высокого класса, чем потенциально подходящее.
Самостоятельная сборка преобразователя
Чтобы механизм адекватно функционировал, сеть должна обладать весьма широкой вариацией значений напряжения. Это снижает риск поломки устройства при резких скачках.
Частота должна соответствовать производственным запросам. Нижний предел этого параметра позволяет ориентироваться в спектре возможностей регулирования скорости привода. В случае, если требуется расширить частотный диапазон относительно уже имеющегося, то необходимо подобрать модель частотного преобразователя, принцип работы которой относится к векторному типу.
Однако, стандартный рабочий диапазон составляет 10-60 Герц и лишь иногда доходит до 100 Герц.
Далее следует обратить внимание на входы и выходы управления. Процесс применения устройств с достаточно большим количеством разъёмов гораздо более удобен. Но и стоимость от этого возрастает, кроме того, затрудняется настройка. Подобные приборы могут быть оснащены дискретными, цифровыми или аналоговыми разъёмами.
Использование дискретного разъёма позволяет вводить управляющие команды и выводить информацию о течении процесса. Цифровой разъём обеспечивает введение сигналов, подаваемых цифровыми датчиками. Аналоговый разъём предназначен для введения сигнала обеспечивающего обратную связь.
Также следует проверять соответствие характеристик шины управления и возможностей преобразователя. В первую очередь это можно понять по соответствию числа разъёмов. По возможности их должно быть даже больше, чем требуется, чтобы имелся простор для модернизирования.
Если говорить о перегрузочных способностях, то следует предпочесть модели, которые имеют уровень мощности на 15% превышающий данные по мощности у двигателя.
В любом случае всегда нужно как следует изучать прилагающуюся к частотнику документацию. Там можно найти все требуемые сведения о параметрах и характеристиках.
Схема сборки
Следующая последовательность подойдёт для проводки, функционирующей с уровнем напряжения в 220 вольт и на одной фазе. Схема рассчитана на двигатель уровнем мощности не более 1 кВт.
В первую очередь осуществляется соединение обмоток двигателя по принципу “треугольник”.
В качестве фундамента преобразователя используется пара плат. Одна из них необходима для блока питания и драйвера. Также туда будут относиться транзисторы и силовые клеммы. Другую плату применяют, чтобы закрепить микроконтроллер и индикатор. Между собой платы контактируют посредством гибкого шлейфа.
Для моделирования импульсного блока питания понадобится стандартная схема, которую можно обнаружить в сети.
Для контроля работы двигателя и напряжения не нужно влиять на ток извне. Тем не менее вполне уместно ввести в устройство линейную развязку с микросхемой.
На общем радиаторе устройства фиксируются транзисторы и диодный мост.
Обязательно потребуются оптроны ОС2-4, которые используются для дублирования кнопок управления. А с помощью ОС-1 выполняются пользовательские функции.
Однофазный преобразователь частоты не нуждается в трансформаторе. В качестве альтернативы воспользоваться токовым шунтом, который при необходимости дополняется при помощи усилителя DA-1.
При мощности до 400 ватт схема для стабильной работы двигателя не требует установки термодатчика. Уровень сетевого напряжения вполне можно контролировать усилителем DA-1-2.
Для управляющих кнопок необходима защита в виде пластиковых толкателей. Сам процесс управления построен на опторазвязке.
При применении проводов чрезмерной длины, используются помехоподавляющие кольца.
Методика подключения преобразователя частоты к двигателю
Подключение преобразователя возможно только при соблюдении рекомендованной изготовителем комплектации устройства:
- Сечения определённых типов;
- Провода определённых типов;
- Дополнительное оборудование.

К дополнительному оборудованию можно отнести:
- Реактор ПТ;
- Тормозной блок;
- Фильтр (входной/выходной).
Не рекомендовано занижение номинала автоматического выключателя. Даже минимальное несоответствие может привести к хаотичному размыканию цепи, что зачастую сводит ситуацию к тому, что звено постоянного тока выходит из строя, и схема оказывается нарушена. Следует обращать внимание на то, чтобы наконечники проводов были хорошо обжаты.
Зачастую при самостоятельной установке входная и выходная клеммы оказываются перепутаны (хотя общепонятную маркировку преобразователя вполне можно увидеть). Поэтому нужно знать, схема формируется таким образом, что клеммы L1, L2, L3 используются для соединения с питающей сетью, а U, V, W – предназначаются для электродвигателя. Если не соблюсти этого правила, скорее всего придётся всё ремонтировать.
Ввод в эксплуатацию преобразователя частоты Danfoss VLT Micro Drive FC 51
Watch this video on YouTube
Также, поломка гарантирована, если на входы управляющего элемента осуществляется подача напряжения на 220 и 380 вольт.
Уход за преобразователем
Чтобы продлить срок службы ПЧ следует осуществлять за ним соответствующий уход:
- Отслеживать оседание пыли на внутренних элементах и производить своевременную чистку устройства при помощи компрессора.
- Удостоверяться в работоспособности узлов, которые используются механизме, и производить их замену, если возникает такая необходимость.
- Соблюдать адекватную рабочую температуру (не более +40°С) механизма и уровень напряжения на управляющей шине.
- Регулярно (не реже одного раза за 3 года) обновлять слой термопасты на силовых компонентах устройства.
- По возможности соблюдать умеренный уровень влажности.
Преобразователи частоты | INSTART
Данная политика конфиденциальности относится к сайту под доменным именем instart-info.ru. Эта страница содержит сведения о том, какую информацию мы (администрация сайта) или третьи лица могут получать, когда вы пользуетесь нашим сайтом.
Данные, собираемые при посещении сайта
Персональные данные
Персональные данные при посещении сайта передаются пользователем добровольно, к ним могут относиться: имя, фамилия, отчество, номера телефонов, адреса электронной почты, адреса для доставки товаров или оказания услуг, реквизиты компании, которую представляет пользователь, должность в компании, которую представляет пользователь, аккаунты в социальных сетях; поля форм могут запрашивать и иные данные.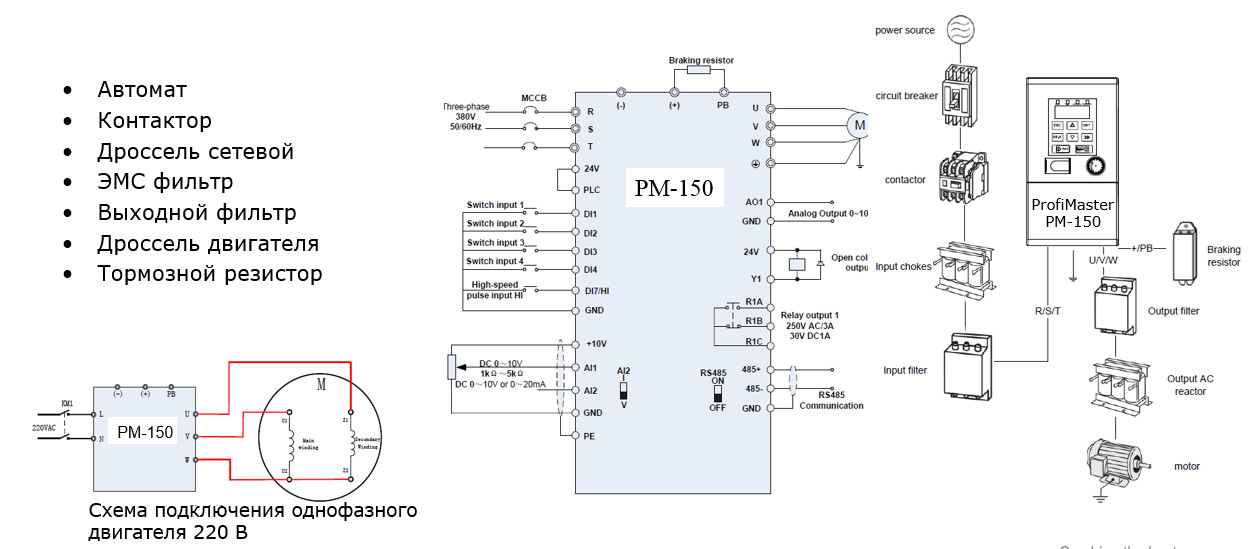
Эти данные собираются в целях оказания услуг или продажи товаров, связи с пользователем или иной активности пользователя на сайте, а также, чтобы отправлять пользователям информацию, которую они согласились получать.
Мы не проверяем достоверность оставляемых данных, однако не гарантируем качественного исполнения заказов или обратной связи с нами при некорректных данных.
Данные собираются имеющимися на сайте формами для заполнения (например, регистрации, оформления заказа, подписки, оставления отзыва, обратной связи и иными).
Формы, установленные на сайте, могут передавать данные как напрямую на сайт, так и на сайты сторонних организаций (скрипты сервисов сторонних организаций).
Также данные могут собираться через технологию cookies (куки) как непосредственно сайтом, так и скриптами сервисов сторонних организаций. Эти данные собираются автоматически, отправку этих данных можно запретить, отключив cookies (куки) в браузере, в котором открывается сайт.
Не персональные данные
Кроме персональных данных при посещении сайта собираются не персональные данные, их сбор происходит автоматически веб-сервером, на котором расположен сайт, средствами CMS (системы управления сайтом), скриптами сторонних организаций, установленными на сайте. К данным, собираемым автоматически, относятся: IP адрес и страна его регистрации, имя домена, с которого вы к нам пришли, переходы посетителей с одной страницы сайта на другую, информация, которую ваш браузер предоставляет добровольно при посещении сайта, cookies (куки), фиксируются посещения, иные данные, собираемые счетчиками аналитики сторонних организаций, установленными на сайте.
К данным, собираемым автоматически, относятся: IP адрес и страна его регистрации, имя домена, с которого вы к нам пришли, переходы посетителей с одной страницы сайта на другую, информация, которую ваш браузер предоставляет добровольно при посещении сайта, cookies (куки), фиксируются посещения, иные данные, собираемые счетчиками аналитики сторонних организаций, установленными на сайте.
Эти данные носят неперсонифицированный характер и направлены на улучшение обслуживания клиентов, улучшения удобства использования сайта, анализа посещаемости.
Предоставление данных третьим лицам
Мы не раскрываем личную информацию пользователей компаниям, организациям и частным лицам, не связанным с нами. Исключение составляют случаи, перечисленные ниже.
Данные пользователей в общем доступе
Персональные данные пользователя могут публиковаться в общем доступе в соответствии с функционалом сайта, например, при оставлении отзывов, может публиковаться указанное пользователем имя, такая активность на сайте является добровольной, и пользователь своими действиями дает согласие на такую публикацию.
По требованию закона
Информация может быть раскрыта в целях воспрепятствования мошенничеству или иным противоправным действиям; по требованию законодательства и в иных случаях, предусмотренных законом.
Для оказания услуг, выполнения обязательств
Пользователь соглашается с тем, что персональная информация может быть передана третьим лицам в целях оказания заказанных на сайте услуг, выполнении иных обязательств перед пользователем. К таким лицам, например, относятся курьерская служба, почтовые службы, службы грузоперевозок и иные.
Сервисам сторонних организаций, установленным на сайте
Сбор, хранение и защита полученной от сторонней организации информации осуществляется в соответствии с настоящей политикой конфиденциальности.
Как мы защищаем вашу информацию
Мы принимаем соответствующие меры безопасности по сбору, хранению и обработке собранных данных для защиты их от несанкционированного доступа, изменения, раскрытия или уничтожения, ограничиваем нашим сотрудникам, подрядчикам и агентам доступ к персональным данным, постоянно совершенствуем способы сбора, хранения и обработки данных, включая физические меры безопасности, для противодействия несанкционированному доступу к нашим системам.
Ваше согласие с этими условиями
Используя этот сайт, вы выражаете свое согласие с этой политикой конфиденциальности. Если вы не согласны с этой политикой, пожалуйста, не используйте наш сайт. Ваше дальнейшее использование сайта после внесения изменений в настоящую политику будет рассматриваться как ваше согласие с этими изменениями.
Отказ от ответственности
Политика конфиденциальности не распространяется ни на какие другие сайты и не применима к веб-сайтам третьих лиц, которые могут содержать упоминание о нашем сайте и с которых могут делаться ссылки на сайт, а также ссылки с этого сайта на другие сайты сети Интернет.
Изменения в политике конфиденциальности
Мы имеем право по своему усмотрению обновлять данную политику конфиденциальности в любое время. В этом случае мы опубликуем уведомление на главной странице нашего сайта. Мы рекомендуем пользователям регулярно проверять эту страницу для того, чтобы быть в курсе любых изменений о том, как мы защищаем информацию пользователях, которую мы собираем. Используя сайт, вы соглашаетесь с принятием на себя ответственности за периодическое ознакомление с политикой конфиденциальности и изменениями в ней.
Как с нами связаться
Если у вас есть какие-либо вопросы о политике конфиденциальности, использованию сайта или иным вопросам, связанным с сайтом, свяжитесь с нами:
8 800 222 00 21
Что такое преобразователь частоты и для чего он нужен?
Для регулирования работы асинхронного двигателя с целью не допустить снижения его КПД применяют специальные устройства – частотные преобразователи.
В данной статье мы постараемся рассмотреть ряд незаметных, на первый взгляд, особенностей в работе асинхронного электродвигателя и проанализируем, насколько важно в ходе его эксплуатации использовать частотный преобразователь.
Что может привести к неисправности?
В асинхронном двигателе напряжение для работы чаще всего поступает через последовательно включенный автоматический выключатель. То сесть данный способ запуска двигателя по другому называется — плавный пуск. Таким образом это провоцирует высокий рост тока пусковой обмотки, что для оборудования закончится весьма плачевно.
Частотный преобразователь имеет к этому важное отношение – он контролирует ток электродвигателя. Формируя необходимое напряжение нужной амплитуды и частоты, частотник подает их на двигатель. Поясним – в процессе его запуска преобразователь отдает не полную частоту, скажем, в 50 Герц, а где-то 0,1Гц (или чуть больше). То же самое и с напряжением – не все 220 В или 380 В, а около 20-30 (смотря, какие выставлены настройки).
То же самое и с напряжением – не все 220 В или 380 В, а около 20-30 (смотря, какие выставлены настройки).
Принцип работы преобразователя частоты для электродвигателя
Все это позволяет пропускать через обмотку статора ток оптимального значения, не выше номинального показателя, чтобы создать магнитное поле, которое, в свою очередь, вместе с созданным в обмотке током создаст крутящий момент. Что касается принципов изменения характеристик напряжения, то подробно об этом, а также о критериях выбора частотника, вы можете прочесть здесь, в одной из других наших статей. Кстати, если говорить о критериях выбора, то отметим также, что выходные токи преобразователя частоты должны быть ниже тока полного режима нагрузки.
Выше мы описывали старт двигателя. Что касается разгона, то в ходе этого процесса преобразователь плавно повышает частоту и величину поступаемого напряжения, тем самым разгоняя двигатель.
Почему без преобразователя не обойтись? Главные преимущества его использования
Итак, преобразователь частоты дает следующие преимущества при управлении асинхронным двигателем:
- Плавный пуск и остановка электропривода
- Управление производительностью оборудования
- Установка оптимальных режимов работы
- Взаимное согласование электроприводов в сложных системах
Самые важные – это 1 и 2 пункты. Почему именно они?
Плавный пуск позволяет наращивать скорость постепенно, что позволяет не допустить скачков тока. Неконтролируемые скачки опасны, так как при прямом пуске они превышают номинальные показатели в 5-7 раз, что может спровоцировать высокую нагрузку на электросеть, защитит оборудование от перегрузок и сэкономит деньги на затратах электроэнергии.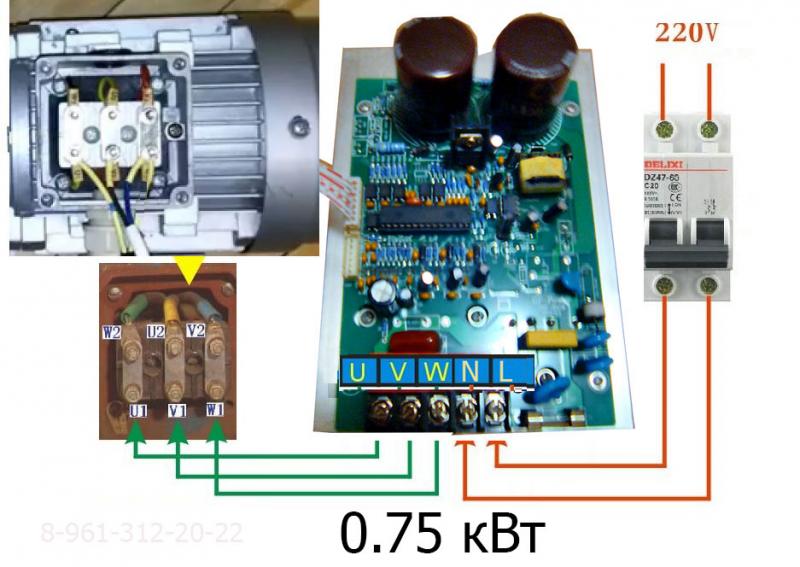
Что касается управления производительностью, то в этом случае преобразователь частоты контролирует скорость работы электродвигателя с учетом «реальных нужд» в системе в целом. Это также помогает напрасно не тратить энергию и гарантирует её экономию в 30-60%.
Помимо 4-х основных преимуществ описанных выше, использование преобразователя обеспечивает следующие преимущества:
- Понижение величины пусковых токов в 4-6 раз
- Регулировка частоты и напряжения с экономией до 50% электроэнергии
- Самостоятельное выключение контактора, снятие напряжения и с его плавной подачей в звено постоянного тока
- Устранение ударных нагрузок, защита двигателя от механической перегрузки, либо недогрузки
- Понижение общего числа ненужных отключений при ударных нагрузках
- Обеспечение нужной величины и частоты при запуске оборудования, поддержание обратной связи смежных приводов
- Контроль скорости вращения ротора и анализ работы двигателя
Классификация частотных преобразователей
В первую очередь, данные устройства различаются по режимам работы:
- Амплитудно-частотное регулирование (скалярное) – применяются в обычных установках с вентиляторами, насосами, тележками, транспортерами и т. д. где не требуется стабилизация оборотов двигателя
- Векторное регулирование – используются на любом оборудовании, где возможны резкие изменения крутящего момента на валу, причем в большом диапазоне и где нужна высокая стабильность оборотов на валу электродвигателя.
 д. где не требуется стабилизация оборотов двигателя
д. где не требуется стабилизация оборотов двигателяПо типу питания:
- Низковольтный 0,4 кВ
- Среднее напряжение 0,69 кВ
- Высоковольтный 6 и 10 кВ
Также данные устройства бывают с промежуточным звеном (связью) и без него. О характере работы таких устройств читайте тут, в ещё одной нашей статье.
Настройка
Настройка преобразователей выполняется строго по инструкции производителя и с учетом особенностей задачи, которая решается посредством оборудования, в котором установлен двигатель.
Например, если применяется асинхронный двигатель скалярного типа, то амплитуду сигнала и выходную частоту устанавливают по определенной формуле. Для других видов двигателя обычно используют датчики скорости вращения вала двигателя. Последовательность этапов алгоритма настройки мы перечислили здесь, в другом нашем материале.
Для других видов двигателя обычно используют датчики скорости вращения вала двигателя. Последовательность этапов алгоритма настройки мы перечислили здесь, в другом нашем материале.
Можно ли отказаться от частотных преобразователей?
Можно. Но лучше этого не делать. Безусловно, скорость вращения можно также регулировать и при помощи гидравлической муфты или механического вариатора и других. Но данные приспособления неэкономичны (а в промышленности это крайне важно!), у них узкий диапазон регулирования, что доставляет серьезные неудобства в ходе эксплуатации, а также они гораздо быстрее выйдут из строя.
Итоги: почему нужно использовать преобразователи частоты?
Вот основной перечень преимуществ для работы оборудования, которые вы получаете, используя преобразователи:
- Плавный пуск и плавную остановку оборудования
- Эффективную защиту от перегрузок и бросков напряжения
- Возможность эксплуатации оборудования с большими номинальными сетевыми напряжениями и токами
- Понижение энергопотребления
- Стабильность технологического процесса и улучшение КПД
Итак, это наиболее важная информация о частотных преобразователях, которую мы хотели до вас донести. В завершение скажем о том, от чего зависит стоимость и на что стоит обращать внимание при выборе. Это такие факторы, как марка производителя, модель и тип управления преобразователем. Также стоит обращать внимание при выборе на тип и уровень мощности двигателя, его диапазон и точность, а также степень точности поддержки крутящего момента.
Преобразователи частоты для ваших приводов
Являясь одним из ведущих изготовителей приводной техники, к нашим механическим компонентам мы, конечно же, предлагаем и подходящую преобразовательную технику. Мы разрабатываем и производим приводные преобразователи и преобразователи частоты для управления и регулирования приводов в машинах и установках. И это не только для централизованного монтажа в электрошкафу или для настенного монтажа, но и для децентрализованного монтажа.
Что такое преобразователь частоты?
Преобразователи частоты – это электронные устройства, которые позволяют регулировать частоту вращения асинхронного двигателя. Обоснование: Если электрические машины или асинхронные двигатели работают непосредственно от сети переменного напряжения, у них есть только одна фиксированная частота вращения – в зависимости от числа полюсов и частоты местной электросети. Однако если приводной системе или производственному процессу требуется изменяемое переменное напряжение, т. е. регулируемая скорость, то применяются преобразователи частоты. Из фиксированного переменного напряжения они могут вырабатывать переменное напряжение с изменяемой амплитудой (величиной выходного напряжения) и частотой.
Обоснование: Если электрические машины или асинхронные двигатели работают непосредственно от сети переменного напряжения, у них есть только одна фиксированная частота вращения – в зависимости от числа полюсов и частоты местной электросети. Однако если приводной системе или производственному процессу требуется изменяемое переменное напряжение, т. е. регулируемая скорость, то применяются преобразователи частоты. Из фиксированного переменного напряжения они могут вырабатывать переменное напряжение с изменяемой амплитудой (величиной выходного напряжения) и частотой.
Как работает преобразователь частоты?
>Преобразователь частоты подключается перед двигателем, чтобы создавать соответствующее потребностям, изменяемое переменное напряжение. Таким образом, уже не электросеть создает частоту и величину напряжения, с которыми работает двигатель, а преобразователь частоты берет на себя эту задачу и регулирует выходную частоту и выходное напряжение.
Большое преимущество преобразователя частоты? С его помощью вы плавно изменяете частоту вращения двигателя почти от нуля до нужного номинального уровня и заметно расширяете ее диапазон. При этом вращающий момент двигателя остается неизменным. Таким образом пользователи оборудования всегда могут адаптировать свою приводную технику к текущим условиям. Кроме того, преобразователь частоты позволяет быстро менять направление вращения. Чтобы изменить порядок следования фаз, достаточно простого управляющего сигнала. После этого подключенный асинхронный двигатель будет работать в противоположном направлении.
При этом вращающий момент двигателя остается неизменным. Таким образом пользователи оборудования всегда могут адаптировать свою приводную технику к текущим условиям. Кроме того, преобразователь частоты позволяет быстро менять направление вращения. Чтобы изменить порядок следования фаз, достаточно простого управляющего сигнала. После этого подключенный асинхронный двигатель будет работать в противоположном направлении.
Какие типы преобразователей существуют?
Бывают преобразователи с управлением по току и с управлением по напряжению. В работе они различаются следующим образом:
- Преобразователи частоты с управлением по току поддерживают отношение тока к частоте (I/f) всегда постоянным и применяются в верхнем мегаваттном диапазоне.
- А в нижнем мегаваттном и в киловаттном диапазонах последним словом техники являются преобразователи частоты с управлением по напряжению. Они поддерживают на постоянном уровне отношение напряжения к частоте: То есть если двигатель, рассчитанный на напряжение 230 В и частоту 50 Гц, должен работать с частотой 25 Гц, то и напряжение уменьшается вдвое до 115 В.

Проще говоря, в преобразователе частоты с управлением по напряжению происходит следующее: На входе имеется выпрямитель, который преобразует переменное напряжение электросети в постоянное напряжение. Затем это постоянное напряжение сглаживается и стабилизируется звеном постоянного тока. Далее действующий со стороны двигателя инвертор генерирует переменное напряжение с выходной частотой, необходимой для приводной системы. Получаемое при этом отношение „напряжение/частота“ определяет необходимую частоту вращения двигателя. Задание или расчет необходимой частоты вращения выполняет встроенный блок управления, который соединяет друг с другом все компоненты.
Где применяются преобразователи?
Преобразователи частоты используются в самых разных отраслях и задачах промышленности. Будь то приводы насосов и вентиляторов, обрабатывающих станков, конвейеров и сборочных линий, кранов или роботизированных систем: представить себе промышленное производство без преобразователей частоты уже невозможно. Ведь там адаптированная или непрерывно регулируемая частота вращения обеспечивает оптимизированные технологические процессы – с тем дополнительным преимуществом, что приводы с регулированием частоты вращения способствуют экономии энергии при работе
Ведь там адаптированная или непрерывно регулируемая частота вращения обеспечивает оптимизированные технологические процессы – с тем дополнительным преимуществом, что приводы с регулированием частоты вращения способствуют экономии энергии при работе
Преобразователи для любых установок и машин
В зависимости от спроса и требований наши преобразователи частоты доступны в различных исполнениях и с множеством дополнительных функций. К тому же очень важно, где нужно разместить преобразователь частоты – на стене, в центральном и защищенном месте в электрошкафу или прямо в цеху, то есть децентрализованно. И в зависимости от того, насколько проста или сложна та или иная приводная система, применяются либо простые преобразователи частоты, либо так называемые специальные преобразователи с большим объемом функций или многоосевые сервоусилители
SEW-EURODRIVE был первой компанией, которая разработала децентрализованную технику и вывела на рынок соответствующие преобразователи частоты и мехатронные приводы. С их помощью пользователи оборудования значительно сокращают затраты на монтаж и создают себе много возможностей для модульного построения своих систем, независимых от электрошкафа. Кроме того, в нашем ассортименте в области преобразовательной техники есть устройства рекуперации энергии в сеть, которые комбинируются с одним или несколькими преобразователями частоты и приводными преобразователями. Также мы предлагаем простые пускатели двигателя для встраивания в
С их помощью пользователи оборудования значительно сокращают затраты на монтаж и создают себе много возможностей для модульного построения своих систем, независимых от электрошкафа. Кроме того, в нашем ассортименте в области преобразовательной техники есть устройства рекуперации энергии в сеть, которые комбинируются с одним или несколькими преобразователями частоты и приводными преобразователями. Также мы предлагаем простые пускатели двигателя для встраивания в
Преобразователи частоты для монтажа в электрошкафу
От простого преобразователя до стандартного или специального преобразователя и далее до модульного сервопреобразователя – мы предлагаем вам широкий ассортимент приводной электроники для централизованного размещения в электрошкафу или распределительном щите:
Преобразователи частоты для настенного монтажа
Еще одна и при этом менее затратная возможность централизованного размещения преобразователей частоты – это настенный монтаж. Он всегда используется в тех случаях, когда приобретать дорогой электрошкаф нерационально. Наши преобразователи частоты, которые подходят для такого способа монтажа, имеют соответствующую степень защиты от IP 54 до IP 66 (для пыльных и влажных условий окружающей среды).
Пускатели двигателя для децентрализованного монтажа
Достаточно ли для вашей приводной системы функции именно преобразователя? Или вам нужно простое включение/выключение двигателя или переключение направления вращения двигателя с левого на правое? Подходящие продукты в ассортименте SEW-EURODRIVE найдутся и для этого случая:
Преобразователи частоты для децентрализованного монтажа
Для размещения вашей приводной электроники рядом с двигателем или мотор-редуктором мы предлагаем широкий выбор преобразователей частоты: от простого преобразователя с настройкой темпа для надежного применения в простых системах до стандартного преобразователя с расширенными функциями регулирования и далее до свободно программируемого специального преобразователя для систем сложной архитектуры. А если вам нужно децентрализованным образом реализовать многоосевые перемещения, а также системы с цепочкой рабочих модулей, то лучшим выбором будут многоосевые сервоусилители. Децентрализованные преобразователи в нашем ассортименте:
А если вам нужно децентрализованным образом реализовать многоосевые перемещения, а также системы с цепочкой рабочих модулей, то лучшим выбором будут многоосевые сервоусилители. Децентрализованные преобразователи в нашем ассортименте:
Что такое преобразователь частоты | Danfoss
Преобразователь частоты (ПЧ) — это тип контроллера двигателя, который приводит электродвигатель в движение, изменяя частоту и величину подаваемого на него напряжения. Преобразователи частоты (ПЧ) также могут управлять плавным разгоном и замедлением электродвигателей при запуске и останове соответственно.
Хотя преобразователь частоты управляет частотой и величиной напряжения, подаваемого на электродвигатель, его функцию часто называют «регулированием скорости», поскольку в результате происходит изменение скорости вращения двигателя.
Есть целый ряд причин, по которым может быть необходимо изменять скорость вращения двигателя.
Например, это позволяет:
- экономить энергию и повысить эффективность работы системы
- преобразовывать мощность в решениях гибридизации
- устанавливать для преобразователя скорость работы, соответствующую требованиям технологического процесса
- согласовать крутящий момент двигателя с требованиями технологического процесса
улучшить условия труда
понизить уровень шума, например от работы вентиляторов и насосов - снизить механические нагрузки на устройства, чтобы продлить срок их службы
срезать пики энергопотребления, чтобы избежать оплаты по пиковой цене и получить возможность использовать двигатели меньших размеров
Кроме того, в современных преобразователях частоты интегрированы функции диагностики и сетевого взаимодействия, что позволяет более эффективно управлять рабочими характеристиками и повысить продуктивность оборудования. Итак, экономия энергии, интеллектуальное управление электродвигателем и уменьшение пиковых значений тока — это три весомые причины, чтобы выбрать ПЧ в качестве контроллера для любой системы управления электродвигателем.
Итак, экономия энергии, интеллектуальное управление электродвигателем и уменьшение пиковых значений тока — это три весомые причины, чтобы выбрать ПЧ в качестве контроллера для любой системы управления электродвигателем.
Наиболее распространенный вариант использования преобразователей частоты— это управление вентиляторами, насосами и компрессорами: для этого применяется более 75 % всех установленных в мире преобразователей частоты.
Также существуют более простые типы контроллеров двигателей, такие как устройства плавного пуска и безреостатные контакторы. Устройство плавного пуска — это полупроводниковый прибор, который обеспечивает плавную раскрутку до полной скорости при запуске электродвигателя.
Безреостатный контактор — это тип контроллера двигателя, который подает на электродвигатель полное линейное напряжение.
Правда о пяти мифах частотно регулируемого привода.
Знание принципов работы частотно регулируемого привода (ЧРП) может упростить процесс выбора преобразователя частоты.
Автор: Пол Эйвери, Yaskawa America Inc.
Независимо от того, насколько давно и каким образом, уже обыденные частотные преобразователи пришли в Вашу жизнь, где-то есть тот, кто впервые стукнулся с ЧРП или только рассматривает возможность их применения. Вспомните, когда вы впервые задумались о применении одного из современных частотных преобразователей с широтно-импульсной модуляцией для двигателя переменного тока. Скорее всего, у вас, на тот момент, было не совсем верное представление об их возможностях и назначении. В этой статье мы рассмотрим и постараемся развеять пять распространенных мифов о частотно регулируемом приводе.
Рис. 1. Частотный преобразователь
Миф № 1: Выходной сигнал частотного преобразователя является синусоидальным
Людям, так или иначе связанные с эксплуатацией электродвигателей в, как правило, знакома работа асинхронных двигателей переменного тока с использованием пускателей. При пуске электродвигателя, пускатель замыкает контакты обмоток электродвигателя
с фазами
3-х фазной питающей сети. Напряжение каждой фаза представляет собой синусоидальную волну. Приложенное напряжение создает на клеммах электродвигателя тоже синусоидальной формы с той же частотой (можно убедится проверкой напряжения
на клеммах электродвигателя). Пока вроде всё просто и понятно.
При пуске электродвигателя, пускатель замыкает контакты обмоток электродвигателя
с фазами
3-х фазной питающей сети. Напряжение каждой фаза представляет собой синусоидальную волну. Приложенное напряжение создает на клеммах электродвигателя тоже синусоидальной формы с той же частотой (можно убедится проверкой напряжения
на клеммах электродвигателя). Пока вроде всё просто и понятно.
А вот что происходит на выходе преобразователя частоты, это совсем другая история. Частотный преобразователь обычно выпрямляет входное трехфазное переменное в постоянное напряжение, которое фильтруется и аккумулируется при помощи больших
конденсаторов звена постоянного тока. Напряжение звена постоянного тока затем инвертируется, для получения переменного напряжения, переменной частоты на выходе. Процесс инверсии осуществляется посредством трех изолированных биполярных транзисторов
(IGBT) с двумя изолированными затворами — по одной паре на выходную фазу (см. Рис 2). Поскольку выпрямленное напряжение инвертируется в переменное, выходное звено называют «инвертором». Включение, выключение, а также
длительность нахождения IGBT-транзисторов в положении ВКЛ или ВЫКЛ может управляться, что и определяет значение частоты выходного напряжения. Отношение выходного среднеквадратического напряжения к выходной частоте определяет магнитный
поток, развиваемый в электродвигателе переменного тока. Когда выходная частота увеличивается, выходное напряжение также должно увеличиваться с той же скоростью, чтобы поддерживать постоянство отношения и, следовательно, постоянную
скорость вращения двигателя. Обычно соотношение между напряжением и частотой поддерживается по линейному закону, что обеспечивает возможность поддержания постоянного крутящего момента.
Поскольку выпрямленное напряжение инвертируется в переменное, выходное звено называют «инвертором». Включение, выключение, а также
длительность нахождения IGBT-транзисторов в положении ВКЛ или ВЫКЛ может управляться, что и определяет значение частоты выходного напряжения. Отношение выходного среднеквадратического напряжения к выходной частоте определяет магнитный
поток, развиваемый в электродвигателе переменного тока. Когда выходная частота увеличивается, выходное напряжение также должно увеличиваться с той же скоростью, чтобы поддерживать постоянство отношения и, следовательно, постоянную
скорость вращения двигателя. Обычно соотношение между напряжением и частотой поддерживается по линейному закону, что обеспечивает возможность поддержания постоянного крутящего момента.
Рис. 2. Схема инвертора с IGBT транзисторами.
Результирующий сигнал напряжения, прикладываемый к обмотке двигателя, не является синусоидальным (см. Рис. 3). Обратите внимание, что иногда отношение напряжения по частоте (V / f) может быть отличным от линейного, что характерно
для вентиляторов, насосов или центробежных нагрузок, которые не требуют постоянного крутящего момента, но обеспечивают тем самым возможность экономии электроэнергии.
Рис. 3). Обратите внимание, что иногда отношение напряжения по частоте (V / f) может быть отличным от линейного, что характерно
для вентиляторов, насосов или центробежных нагрузок, которые не требуют постоянного крутящего момента, но обеспечивают тем самым возможность экономии электроэнергии.
Рис. 3. Форма сигнала ШИМ напряжения на выходе частотного преобразователя
Как же отразится пилообразная форма питающего напряжения на работе электродвигателя. Асинхронный двигатель является по своей сути большой катушкой индуктивности. А характерной особенностью индукции является ее устойчивость к изменениям
тока. Увеличивается или уменьшается сита ток, индукция будет выступать против этого изменения. Какое же это имеет отношение к форме сигнала напряжения ШИМ на рисунке 3? Вместо того, чтобы позволить импульсу тока увеличиваться в том же
порядке, что и приложенный импульс напряжения, ток начнет медленно возрастать. Когда импульс напряжения закончился, ток плавно уменьшается, а не исчезает мгновенно. В общих чертах это происходит следующим образом: до момента,
когда ток снизился до нуля, поступает следующий импульс напряжения, и ток начинает плавно увеличиваться. Если последующий импульс становятся шире, ток плавно достигает большего значения, чем раньше. В конце концов, текущий сигнал становится
синусоидальным, хотя и с некоторыми зубчатыми переходами (см. Рис. 4).
В общих чертах это происходит следующим образом: до момента,
когда ток снизился до нуля, поступает следующий импульс напряжения, и ток начинает плавно увеличиваться. Если последующий импульс становятся шире, ток плавно достигает большего значения, чем раньше. В конце концов, текущий сигнал становится
синусоидальным, хотя и с некоторыми зубчатыми переходами (см. Рис. 4).
Рис. 4. Форма сигнала тока на выходе частотного преобразователя
Однако не думайте, что вы можете подключить свой соленоид к фазам выходного напряжения ЧРП. Это всё же не совсем переменное напряжение.
Миф № 2: все частотные преобразователи одинаковы
В общем виде частотно-регулируемый привод сегодня является довольно зрелым продуктом. Большинство коммерчески доступных приводов содержат одни и те же базовые компоненты: мостовой выпрямитель, блок питания, конденсаторный блок постоянного
тока и плата выходного инвертора. Разумеется, существуют различия в алгоритмах управления переключением транзисторов IGBT инвертора, надежности компонентов и эффективности схемы теплового рассеивания. Но основные компоненты остаются
прежними.
Но основные компоненты остаются
прежними.
Есть также исключения. Например, в некоторых ЧРП инвертер имеет три вывода. Такая схема позволяет выходным импульсам варьироваться от половинного до полного импульса сигнала напряжения (см. Рис. 5).
Рис. 5. Трехуровневый выходной сигнал напряжения
Для достижения трехуровневого выходного сигнала звено инвертора должно иметь в два раза больше выходных переключателей, а также запирающих диодов (см. Рис. 6). Преимущества трехуровневой схемы заключается в уменьшении перенапряжения на двигателе из-за гармонических волн, снижении синфазных помех, а также снижении паразитных токов на валах и подшипниках.
Рис. 6. Схема трехуровневого инвертора
Матричный инвертор является еще более нетипичным типом ЧРП. Частотные преобразователи с матричными инверторами не имеют шины постоянного тока или мостового выпрямителя. Вместо этого они используют двунаправленные переключатели, которые могут
подключать любое из входящих фазных напряжений к любой из трех выходных фаз (см. Рис. 7). Преимущество этой схемы заключается в том, что мощность может свободно протекать от сети к двигателю или от двигателя
к сети для рекуперативного привода постоянного тока. Недостатком является то, что на входе необходима установка фильтра, для обеспечения дополнительной индуктивности и фильтрации формы ШИМ, чтобы исключить негативное влияние на питающую
сеть.
Рис. 7). Преимущество этой схемы заключается в том, что мощность может свободно протекать от сети к двигателю или от двигателя
к сети для рекуперативного привода постоянного тока. Недостатком является то, что на входе необходима установка фильтра, для обеспечения дополнительной индуктивности и фильтрации формы ШИМ, чтобы исключить негативное влияние на питающую
сеть.
Рис. 7. Схема матричного ЧРП
Кроме частотных преобразователей с трехуровневыми выходами и инверторами матричного типа существуют также и другие типы частотно-регулируемых приводов. Таким образом миф о том, что все частотные преобразователи одинаковые развеян.
Миф № 3: Частотный преобразователь компенсирует коэффициентом мощности.
Нередко можно увидеть, что производители частотных преобразователей заявляют значение коэффициента мощности, например, равным 0,98 или почти 1. Действительно коэффициент мощности несколько улучшается после установки ЧРП перед асинхронным двигателем. ЧРП
компенсирует реактивную мощность за счет конденсаторного звена. Однако полностью компенсировать фазовый сдвиг преобразователь частоты не может.
ЧРП
компенсирует реактивную мощность за счет конденсаторного звена. Однако полностью компенсировать фазовый сдвиг преобразователь частоты не может.
Полный коэффициент мощности должен включать реактивную мощность, вызываемую гармониками, создаваемыми в звене постоянного тока. Причиной является работа диодного моста. Важно помнить, что диод работает только тогда, когда напряжение на стороне анода выше, чем напряжение на стороне катода (прямое смещение). Это означает, что диоды открыты только на пике каждой временной фазы как положительной, так и отрицательной частей синусоидальной волны. Это приводит к волнообразной форме волны. Это также приводит к искажению входного тока и прерыванию (см. Рис. 8).
Рис. 7. Форма сигналов после выпрямителя
Чтобы вычислить истинный полный коэффициент мощности (PF), необходимо учесть эффекты гармоник. Следующее уравнение показывает, как гармоники влияют на полный коэффициент мощности:
где THD = суммарное гармоническое искажение
Для прерывистого сигнала входного тока в уравнении THD будет находиться в районе 100% или более. Подставляя это в уравнение, получаем истинный коэффициент мощности PF ближе к 0,71, по сравнению с заявленным 0,98, который
не учитывает гармоники.
Подставляя это в уравнение, получаем истинный коэффициент мощности PF ближе к 0,71, по сравнению с заявленным 0,98, который
не учитывает гармоники.
Но не всё так плохо. В настоящее время существует множество способов гармонические искажения, создаваемые в звене постоянного тока. Они используют как пассивные, так и активные методы подавления искажений входного сигнала. Так, например, вышеупомянутый матричный преобразователь частоты является примером активного метода подавления гармонических искажений.
Миф № 4: С частотным преобразователем Вы можете эксплуатировать двигатель на любой скорости.
Особенность применения частотных преобразователей заключается, что они могут изменять как напряжение, так и частоту выходного сигнала. Благодаря возможности обеспечения требуемой скорости вращения электродвигателя ЧРП нашли широкое применение во всех
сферах экономики и всех отраслях промышленности ЧРП может легко выдавать сигнал любой частоту в пределах предусмотренного изготовителем диапазона регулирования. Однако необходимо учитывать, что частотный преобразователь работает в составе
электродвигателя в реальных условиях. Технологические требования, такие как необходимый крутящий момент, охлаждение, требуемая мощность так или иначе ограничивают фактический диапазон регулирования преобразователя частоты.
Однако необходимо учитывать, что частотный преобразователь работает в составе
электродвигателя в реальных условиях. Технологические требования, такие как необходимый крутящий момент, охлаждение, требуемая мощность так или иначе ограничивают фактический диапазон регулирования преобразователя частоты.
Ограничение № 1. С точки зрения охлаждения электродвигателя, низкая скорость вращения — это не очень хорошая идея. В частности, полностью закрытые вентиляторные (TEFC) двигатели имеют охлаждаются только за счет внутреннего вентилятора, который вращается вместе с валом двигателя. Чем медленнее скорость вращения двигатель, тем меньше поток воздуха и тем хуже охлаждение. Закрытые двигатели обычно не рекомендуются эксплуатировать с частотой ниже 15 Гц (диапазон скоростей 4:1).
Ограничение № 2: Электродвигатели имеют определенные ограничения диапазона скоростей, связанные с механическими и динамическими ограничениями нагрузок вращающихся частей. Обычно эта скорость называется максимальной
безопасной частотой вращения. Данная характеристика не всегда указывается на шильдике мотора.
Обычно эта скорость называется максимальной
безопасной частотой вращения. Данная характеристика не всегда указывается на шильдике мотора.
Ограничение № 3: При достижении максимальной частоты вращения крутящий момент двигателя может снижаться. Это ограничение скорости связано с ограничением мощности, которое включает в себя скорость вращения и крутящий
момент. Если быть еще точнее, что будет снижаться напряжения ЧРП. Обратите внимание, что вращение двигателя также генерирует собственное напряжение, называемое обратной электродвижущей силой (ЭДС), которое увеличивается со скоростью. Обратная
ЭДС создается двигателем, чтобы противостоять приложенному напряжению от ПЧ. На более высоких скоростях ПЧ должен подавать еще большее напряжения, чтобы преодолеть обратную ЭДС, и ток мог протекать по обмоткам двигателя, создавая
крутящий момент. После определенного максимального значения преобразователь частоты не может преодолеть обратную ЭДС электродвигателя, и, следовательно, крутящий момент двигателя уменьшается, что, в свою очередь, снижает скорость. Снижение
скорости опять приводит к более низкой обратной ЭДС, которая, в свою очередь, позволяет протекать току в двигатель снова. Существует точка равновесия, в которой двигатель достигает максимальной скорости при максимальном крутящем
моменте.
Снижение
скорости опять приводит к более низкой обратной ЭДС, которая, в свою очередь, позволяет протекать току в двигатель снова. Существует точка равновесия, в которой двигатель достигает максимальной скорости при максимальном крутящем
моменте.
Как упоминалось выше ЧРП может создавать крутящий момент на двигателе, сохраняя постоянство отношения V/f (см. Рис. 9).
Рис. 9. График зависимости напряжения от частоты.
Когда частота выходного сигнала увеличивается, напряжение увеличивается линейно. Проблема возникает, когда частота превышает номинальную частоту двигателя. Помимо номинальной частоты, не может увеличиваться выходное напряжение, что соответственно
приводит к уменьшению отношения V / f. Отношение V / f является мерой напряженности магнитного поля в двигателе и влияет на его крутящий момент. Следовательно, способность мотора создавать номинальный крутящий момент
при частоте выше номинальной должна уменьшаться со скоростью 1 / частота, при этом произведение крутящего момента и частоты, равное мощности, является постоянным. Область работы над номинальной частотой называется постоянным диапазоном
мощности, а работа на скоростях ниже номинальной — диапазоном постоянного крутящего момента (см. Рис. 10).
Область работы над номинальной частотой называется постоянным диапазоном
мощности, а работа на скоростях ниже номинальной — диапазоном постоянного крутящего момента (см. Рис. 10).
Рис. 10. Графики зависимости мощности и крутящего момента электродвигателя от частоты.
Миф № 5: Входной ток преобразователя частоты выше выходного тока
Возможно, это не миф, а недоразумение. Некоторые пользователи ПЧ измеряют значение выходного и входного тока с помощью измерительного инструмента или с помощью мониторов ПЧ и обнаруживают, что входной ток намного ниже выходного. Это похоже не согласуется с идеей о том, что частотный преобразователь должен иметь некоторые потери и поэтому вход всегда должен быть немного выше, чем выход. Концепция правильная, но она учитывает мощность, а не ток, который следует учитывать:
Входное напряжение всегда находится под напряжением переменного тока. Выходное напряжение изменяется со скоростью по образцу V / f. На самом деле компоненты уравнения немного сложнее. Но ключом к пониманию данного процесса
является знание того, что асинхронный двигатель имеет два токовых компонента: один отвечает за создание магнитного поля в двигателе, которое необходимо для вращения двигателя; а второй — ток, создающий крутящий момент, который,
как следует из названия, отвечает за создание крутящего момента.
На самом деле компоненты уравнения немного сложнее. Но ключом к пониманию данного процесса
является знание того, что асинхронный двигатель имеет два токовых компонента: один отвечает за создание магнитного поля в двигателе, которое необходимо для вращения двигателя; а второй — ток, создающий крутящий момент, который,
как следует из названия, отвечает за создание крутящего момента.
Привод потребляет входной ток, пропорциональный активному крутящему моменту двигателя. Ток, необходимый для создания магнитного поля, обычно не изменяется со скоростью и обеспечивается основными конденсаторами звена постоянного тока, которые
заряжаются при включении питания ПЧ. При малых значения крутящего момента выходной ток может быть намного выше, чем входной, поскольку входной ток отражает только составляющую, создающую крутящий момент плюс некоторые гармоники, но не включает
ток намагничивания. Ток намагничивания циркулирует между конденсаторами шины постоянного тока и двигателем. Даже при полной нагрузке входной ток обычно будет ниже, чем ток двигателя, поскольку на входе по-прежнему нет составляющей тока намагничивания.
Даже при полной нагрузке входной ток обычно будет ниже, чем ток двигателя, поскольку на входе по-прежнему нет составляющей тока намагничивания.
Помните, что в уравнении мы сравниваем входную и выходную мощности. Например, рассмотрим полностью нагруженный двигатель, вращающийся на низких оборотах. Входное напряжение номинальное, а выходное напряжение будет низким из-за низкой скорости вращения. Выходной ток в данном случае будет высокий из-за полной нагрузки на двигатель. А чтобы сбалансировать уравнение мощности, входной ток должен быть ниже выходного тока.
Узнать подробную информацию о частотных преобразователях, ознакомиться с производственной линейкой YASKAWA Вы можете у нашего партнера — ООО «КоСПа»
Или в соответствующем разделе преобразователя YASKAWA
Оригинал статьи: https://www.yaskawa.com/about-us/media-center/industry-articles-display?articleId=2167778
27.07.2017
Какая у вас частота? | Groschopp
Нам часто задают вопрос: «Может ли двигатель, рассчитанный на 60 Гц, работать при 50 Гц (или наоборот)?» При работе двигателя с частотой, отличной от частоты, указанной на паспортной табличке, может возникнуть несколько проблем.

В нашем предыдущем блоге «Основы двигателя переменного тока» мы объяснили, что синхронная скорость двигателя переменного тока определяется двумя факторами: количеством полюсов в двигателе и частотой входной мощности двигателя.Для данного двигателя количество полюсов не может быть изменено, потому что оно определяется физической конструкцией двигателя. Частота потребляемой мощности чаще всего определяется системой распределения электроэнергии в стране, в которой используется двигатель. Наиболее распространенные частоты — 50 Гц и 60 Гц.
Снижение частоты двигателя переменного тока снижает его скорость. В двигателях переменного тока с вентиляторным охлаждением более низкая скорость может означать, что вентилятор также не охлаждает двигатель. Это может означать, что длительный номинальный рабочий крутящий момент двигателя также уменьшится.Более медленный двигатель также означает, что номинальная мощность двигателя снизится.
Другой важный параметр, который изменяется при изменении частоты, — это отношение вольт к герцам. Двигатели переменного тока предназначены для работы с определенным соотношением В / Гц. В двигателе переменного тока сопротивление изменяется при изменении частоты. Если напряжение остается постоянным, а сопротивление уменьшается, ток будет увеличиваться. Повышенный ток может обеспечить больший крутящий момент, но это также вызовет большие резистивные потери в двигателе, что может вызвать его перегрев.Точно так же, если напряжение остается постоянным, а сопротивление увеличивается, ток будет уменьшаться. Пониженный ток означает, что двигатель будет иметь меньший крутящий момент. Чтобы избежать обеих этих ситуаций, следует поддерживать постоянное соотношение В / Гц. Это принцип работы многих частотно-регулируемых приводов. Поддерживая постоянное соотношение В / Гц, ток, потребляемый двигателем, остается неизменным, и двигатель может поддерживать крутящий момент при различных скоростях. Это также означает, что двигатель, рассчитанный на 240 В переменного тока, 60 Гц (В / Гц = 240/60 = 4), может работать при 200 В переменного тока, 50 Гц (В / Гц = 200/50 = 4).
Двигатели переменного тока предназначены для работы с определенным соотношением В / Гц. В двигателе переменного тока сопротивление изменяется при изменении частоты. Если напряжение остается постоянным, а сопротивление уменьшается, ток будет увеличиваться. Повышенный ток может обеспечить больший крутящий момент, но это также вызовет большие резистивные потери в двигателе, что может вызвать его перегрев.Точно так же, если напряжение остается постоянным, а сопротивление увеличивается, ток будет уменьшаться. Пониженный ток означает, что двигатель будет иметь меньший крутящий момент. Чтобы избежать обеих этих ситуаций, следует поддерживать постоянное соотношение В / Гц. Это принцип работы многих частотно-регулируемых приводов. Поддерживая постоянное соотношение В / Гц, ток, потребляемый двигателем, остается неизменным, и двигатель может поддерживать крутящий момент при различных скоростях. Это также означает, что двигатель, рассчитанный на 240 В переменного тока, 60 Гц (В / Гц = 240/60 = 4), может работать при 200 В переменного тока, 50 Гц (В / Гц = 200/50 = 4).
По возможности следует выбирать двигатель, который рассчитан на частоту мощности страны, в которой двигатель будет работать. Если двигатель должен работать при 50 Гц и 60 Гц, многие производители, включая Groschopp, делают двигатели, которые рассчитаны на обеих частотах. Кроме того, как мы видели выше, хотя в определенных ситуациях можно запустить двигатель на более высокой или более низкой частоте, чем та, на которую он рассчитан, это не всегда практично из-за изменений крутящего момента, потребляемого тока и потерь двигателя.
Мощность двигателя и крутящий момент по сравнению с частотой частотно-регулируемого привода
Мой январь 2013 г. В колонке Pumps & Systems основное внимание уделялось снижению мощности двигателя (л.с.) по мере уменьшения частоты с помощью частотно-регулируемого привода (VFD). У меня было несколько просьб вернуться к этой теме и объяснить взаимосвязь между мощностью и крутящим моментом в широком диапазоне частот.
Взаимосвязь между л. с. и крутящим моментом
с. и крутящим моментом
Взаимосвязь между мощностью и крутящим моментом, создаваемым электродвигателем, может вызывать некоторое недоумение.Когда этот двигатель управляется частотно-регулируемым приводом, это может сбивать с толку.
В линейной среде работа — это произведение силы, приложенной к объекту, и расстояния, которое объект проходит под действием этой силы:
w = fd
В среде вращения крутящий момент эквивалентен работе, но его значение немного сложнее. Крутящий момент равен приложенной силе, его расстоянию от оси вращения (радиус) и углу (θ) приложения силы:
t = f (r sin θ)
В U.S., крутящий момент выражается в фунт-футах (фунт-фут). Когда я учился в школе, это были фут-фунты (фут-фунты), и я до сих пор использую старое значение. Крутящий момент указывает, сколько работы было выполнено, но не показывает, насколько быстро эта работа завершена.
Мощность — скорость, с которой выполняется крутящий момент (работа):
p = t / время
В США мы используем HP как единицу мощности. Два приведенных ниже уравнения показывают соотношение л.с. и крутящего момента при изменении скорости двигателя. Константа 5 252 является результатом деления исходных данных теста Джеймса Ватта (33 000) на 2 пи (π).
л.с. = (t x об / мин) / 5,252
t = (л.с. x 5,252) / об / мин
В зависимости от соотношения, крутящий момент должен удвоиться, если HP должна оставаться постоянной при уменьшении скорости вдвое. Чтобы обеспечить такую же мощность на более низкой скорости, двигатель должен выполнять в два раза больше работы за оборот, что требует вдвое большего крутящего момента. Вот почему вал и рама двигателя на 900 об / мин обычно больше, чем у двигателя с частотой вращения 1800 об / мин той же мощности.
Введение в частотно-регулируемый привод
Когда скорость двигателя переменного тока управляется частотно-регулируемым приводом, мощность или крутящий момент будут изменяться в зависимости от изменения частоты. На рисунке 1 представлена графическая иллюстрация этих изменений. Ось X — частота вращения двигателя от 0 до 120 герц. Ось Y — процент мощности и крутящего момента. При 60 Гц (базовая скорость двигателя) и мощность, и крутящий момент равны 100 процентам. Когда частотно-регулируемый привод снижает частоту и скорость двигателя, он также снижает напряжение, чтобы поддерживать постоянным соотношение вольт / герц. Крутящий момент остается на уровне 100 процентов, но HP уменьшается прямо пропорционально изменению скорости.
На рисунке 1 представлена графическая иллюстрация этих изменений. Ось X — частота вращения двигателя от 0 до 120 герц. Ось Y — процент мощности и крутящего момента. При 60 Гц (базовая скорость двигателя) и мощность, и крутящий момент равны 100 процентам. Когда частотно-регулируемый привод снижает частоту и скорость двигателя, он также снижает напряжение, чтобы поддерживать постоянным соотношение вольт / герц. Крутящий момент остается на уровне 100 процентов, но HP уменьшается прямо пропорционально изменению скорости.
При частоте 30 Гц значение HP составляет всего 50 процентов от HP при частоте 60 Гц.Причина этого в том, что общий крутящий момент, создаваемый за единицу времени, также снижается на 50 процентов из-за меньшего количества оборотов двигателя. Вы можете использовать уравнения HP и крутящего момента, чтобы проверить это соотношение.
Рисунок 1. Изменение мощности и крутящего момента с разными частотами
Когда VFD увеличивает частоту выше 60 Гц, мощность и крутящий момент полностью переключаются. HP остается на уровне 100 процентов, а крутящий момент уменьшается с увеличением частоты.Снижение крутящего момента происходит из-за того, что полное сопротивление двигателя увеличивается с увеличением частоты. Поскольку частотно-регулируемый привод не может увеличить напряжение выше напряжения питания, ток уменьшается с увеличением частоты, уменьшая доступный крутящий момент.
HP остается на уровне 100 процентов, а крутящий момент уменьшается с увеличением частоты.Снижение крутящего момента происходит из-за того, что полное сопротивление двигателя увеличивается с увеличением частоты. Поскольку частотно-регулируемый привод не может увеличить напряжение выше напряжения питания, ток уменьшается с увеличением частоты, уменьшая доступный крутящий момент.
Теоретически крутящий момент уменьшается пропорционально отношению базовой скорости к более высокой скорости (60 Гц / 90 Гц = 67 процентов). В реальных приложениях другие факторы могут снизить фактический доступный крутящий момент намного ниже теоретических значений, показанных на рисунке 1.К ним относятся повышенное трение в подшипниках, повышенная нагрузка на вентилятор и дополнительная нагрузка на ротор. Крутящий момент двигателя при полной нагрузке должен быть снижен при работе на скоростях выше 60 герц. Типичные рекомендации производителей по снижению номинальных характеристик предлагают использовать отношение базовой частоты к максимальной частоте для частот до 90 герц. На скоростях выше 90 Гц часто используется квадрат отношения.
На скоростях выше 90 Гц часто используется квадрат отношения.
Конечным пользователям следует проконсультироваться со своим производителем, прежде чем эксплуатировать двигатель со скоростью выше его базовой. Типичные проблемы — баланс ротора, срок службы подшипников и критическая скорость.Высококачественные двигатели с частотой вращения 1800 и 1200 об / мин мощностью до 200 л.с. должны без проблем работать с частотой вращения, в два раза превышающей базовую. Превышение скорости обычно не допускается на двигателях мощностью 3600 об / мин мощностью более 50 л.с. Национальная ассоциация производителей электрооборудования (NEMA) MG1 предоставляет несколько рекомендаций по превышению скорости, которым должны соответствовать производители.
Вы когда-нибудь совершали ошибку, управляя 230-вольтовым двигателем на 460 вольт? Если да, то вы, вероятно, заметили в комнате много дыма. Однако есть приложения, в которых это действительно может работать. Новым способом обеспечения постоянного крутящего момента на скоростях, превышающих базовую, является запуск двигателя на 230 В на частотно-регулируемом приводе на 460 В. В этих приложениях привод запрограммирован на обеспечение полного напряжения на частоте 120 Гц, а затем снижает напряжение пропорционально уменьшению скорости. При 90 Гц выходное напряжение будет 345 вольт, а при 60 Гц оно будет соответствовать напряжению, указанному на паспортной табличке двигателя (230 вольт). Отношение вольт / герц остается постоянным 3,83 во всем диапазоне скоростей.
Новым способом обеспечения постоянного крутящего момента на скоростях, превышающих базовую, является запуск двигателя на 230 В на частотно-регулируемом приводе на 460 В. В этих приложениях привод запрограммирован на обеспечение полного напряжения на частоте 120 Гц, а затем снижает напряжение пропорционально уменьшению скорости. При 90 Гц выходное напряжение будет 345 вольт, а при 60 Гц оно будет соответствовать напряжению, указанному на паспортной табличке двигателя (230 вольт). Отношение вольт / герц остается постоянным 3,83 во всем диапазоне скоростей.
Что такое частота? | Fluke
Частота переменного тока (ac) — это количество циклов в секунду синусоидальной волны переменного тока.Частота — это скорость, с которой ток меняет направление в секунду. Он измеряется в герцах (Гц), международной единице измерения, где 1 герц равен 1 циклу в секунду.
- Герц (Гц) = Один герц равен одному циклу в секунду.
- Цикл = Одна полная волна переменного тока или напряжения.
- Чередование = половина цикла.
- Период = время, необходимое для создания одного полного цикла сигнала.

По сути, частота — это то, как часто что-то повторяется.В случае электрического тока частота — это количество раз, когда синусоидальная волна повторяет или завершает цикл от положительного к отрицательному.
Чем больше циклов происходит в секунду, тем выше частота.
Пример: Если переменный ток имеет частоту 3 Гц (см. Диаграмму ниже), это означает, что его форма волны повторяется 3 раза за 1 секунду.
Частота обычно используется для описания работы электрического оборудования. Ниже приведены некоторые распространенные диапазоны частот:
- Частота сети питания (обычно 50 Гц или 60 Гц).
- Преобразователи частоты, которые обычно используют несущую частоту 1–20 килогерц (кГц).
- Диапазон звуковых частот: от 15 Гц до 20 кГц (диапазон человеческого слуха).
- Радиочастота: 30-300 кГц.
- Низкая частота: от 300 кГц до 3 мегагерц (МГц).
- Средняя частота: 3-30 МГц.
- Высокая частота: 30-300 МГц.

Цепи и оборудование часто предназначены для работы на фиксированной или переменной частоте. Оборудование, предназначенное для работы на фиксированной частоте, работает ненормально, если работает на другой частоте, чем указано.Например, двигатель переменного тока, предназначенный для работы на частоте 60 Гц, работает медленнее, если частота падает ниже 60 Гц, и быстрее, если она превышает 60 Гц. Для двигателей переменного тока любое изменение частоты вызывает пропорциональное изменение скорости двигателя. Другой пример: уменьшение частоты на 5% приводит к снижению скорости двигателя на 5%.
Как измерить частоту
Цифровой мультиметр, который включает режим частотомера, может измерять частоту сигналов переменного тока, а также может предлагать следующее:
- Запись MIN / MAX, которая позволяет регистрировать измерения частоты в течение определенного периода или таким же образом записываются измерения напряжения, тока или сопротивления.
- Автоматический выбор диапазона, при котором автоматически выбирается частотный диапазон, кроме случаев, когда измеренное напряжение выходит за пределы диапазона измерения частоты.
h-l.png)
Электрические сети различаются в зависимости от страны. В США сетка основана на высокостабильном 60-герцовом сигнале, то есть 60 циклов в секунду.
В США для электроснабжения домашних хозяйств используется однофазный источник питания переменного тока на 120 Вольт. Мощность, измеренная в настенной розетке в доме в США, даст синусоидальные волны, колеблющиеся в пределах ± 170 вольт, при измерении истинного среднеквадратичного напряжения на уровне 120 вольт.Частота колебаний составит 60 циклов в секунду.
Hertz назван в честь немецкого физика Генриха Герца (1857-1894), который первым начал передавать и принимать радиоволны. Радиоволны распространяются с частотой один цикл в секунду (1 Гц). (Точно так же часы отсчитывают 1 Гц.)
Ссылка: Принципы цифрового мультиметра Глена А. Мазура, American Technical Publishers.
Мазура, American Technical Publishers.
Статьи по теме:
Изменение частоты напряжения
Отклонение от номинального напряжения:
В соответствии с NEMA MG 1, 12.44, двигатели должны успешно работать в рабочих условиях при номинальной нагрузке с колебаниями напряжения до следующих процентов номинального напряжения:
- Универсальные двигатели, кроме двигателей вентиляторов — плюс-минус 6 процентов (при номинальной частоте).
- Асинхронные двигатели — плюс-минус 10 процентов (с номинальной частотой).
Характеристики при этих колебаниях напряжения не обязательно будут соответствовать стандартам, установленным для работы при номинальном напряжении.
Отклонение от номинальной частоты:
Двигатели переменного тока должны успешно работать в рабочих условиях при номинальной нагрузке и номинальном напряжении с изменением частоты до 5 процентов выше или ниже номинальной частоты. Характеристики в пределах этого изменения частоты не обязательно будут соответствовать стандартам, установленным для работы на номинальной частоте.
Характеристики в пределах этого изменения частоты не обязательно будут соответствовать стандартам, установленным для работы на номинальной частоте.
Комбинированное изменение напряжения и частоты:
Двигатели переменного тока должны успешно работать в рабочих условиях при номинальной нагрузке с комбинированным изменением напряжения и частоты до 10 процентов выше или ниже номинального напряжения и номинальной частоты при условии, что изменение частоты не превышает 5 процентов.Характеристики в этом комбинированном варианте не обязательно будут соответствовать стандартам, установленным для работы при номинальном напряжении и номинальной частоте.
Влияние колебаний напряжения и частоты на работу асинхронных двигателей:
- Асинхронные двигатели время от времени работают в цепях напряжения или частоты, отличных от тех, на которые они рассчитаны. В таких условиях характеристики двигателя будут отличаться от номинальных. Ниже приводится краткое изложение некоторых эксплуатационных результатов, вызванных небольшими изменениями напряжения и частоты, и указывающее на общие изменения, вызванные такими изменениями в рабочих условиях.
- При увеличении или уменьшении напряжения на 10 процентов от значения, указанного на паспортной табличке, нагрев при номинальной мощности нагрузки может увеличиться. Такая работа в течение продолжительных периодов времени может ускорить ухудшение системы изоляции.
- В двигателе с нормальными характеристиками при полной номинальной мощности нагрузки 10-процентное повышение напряжения по сравнению с указанным на паспортной табличке обычно приводит к значительному снижению коэффициента мощности.Снижение напряжения на 10% ниже значения, указанного на паспортной табличке, обычно приводит к увеличению коэффициента мощности.
- Заторможенный ротор и момент пробоя будут пропорциональны квадрату приложенного напряжения.
- Увеличение напряжения на 10 процентов приведет к уменьшению скольжения примерно на 17 процентов, тогда как уменьшение на 10 процентов увеличит скольжение примерно на 21 процент. Таким образом, если скольжение при номинальном напряжении составляет 5 процентов, оно будет увеличено до 6,05 процента, если напряжение будет уменьшено на 10 процентов.
- Частота выше номинальной обычно улучшает коэффициент мощности, но снижает крутящий момент заторможенного ротора и увеличивает скорость, трение и потери на ветер. При частоте ниже номинальной скорость уменьшается, крутящий момент заторможенного ротора увеличивается, а коэффициент мощности уменьшается. Для определенных видов нагрузки двигателя, например, на текстильных фабриках, необходимо точное регулирование частоты.
- Если изменение напряжения и частоты происходит одновременно, эффект накладывается.Таким образом, если напряжение высокое, а частота низкая, крутящий момент заторможенного ротора будет значительно увеличен, но коэффициент мощности будет уменьшен, а повышение температуры увеличится при нормальной нагрузке.
- Изложенное выше относится, в частности, к двигателям общего назначения. Они не всегда могут быть верными в отношении двигателей специального назначения, построенных для определенной цели или применительно к очень маленьким двигателям.
 Ниже приводится краткое изложение некоторых эксплуатационных результатов, вызванных небольшими изменениями напряжения и частоты, и указывающее на общие изменения, вызванные такими изменениями в рабочих условиях.
Ниже приводится краткое изложение некоторых эксплуатационных результатов, вызванных небольшими изменениями напряжения и частоты, и указывающее на общие изменения, вызванные такими изменениями в рабочих условиях. Таким образом, если скольжение при номинальном напряжении составляет 5 процентов, оно будет увеличено до 6,05 процента, если напряжение будет уменьшено на 10 процентов.
Таким образом, если скольжение при номинальном напряжении составляет 5 процентов, оно будет увеличено до 6,05 процента, если напряжение будет уменьшено на 10 процентов. Они не всегда могут быть верными в отношении двигателей специального назначения, построенных для определенной цели или применительно к очень маленьким двигателям.
Они не всегда могут быть верными в отношении двигателей специального назначения, построенных для определенной цели или применительно к очень маленьким двигателям.Работа универсальных многофазных 2-, 4- и 8-полюсных асинхронных двигателей переменного тока общей мощностью 60 Гц, работающих на частоте 50 Гц:
В то время как универсальные многофазные 2, 4, 6 и 8-полюсные асинхронные двигатели переменного тока с частотой 60 Гц не предназначены для работы на частоте 60 Гц в цепях с частотой 50 Гц, они могут удовлетворительно работать на частоте 50 Гц. цепей, если их номинальное напряжение и мощность в лошадиных силах соответственно уменьшены.Когда такие двигатели с частотой 60 Гц работают в цепях с частотой 50 Гц, подаваемое напряжение на частоте 50 Гц должно быть уменьшено до 5/6 от номинальной мощности двигателя в 60 Гц.
Когда двигатель 60 Гц работает на частоте 50 Гц при напряжении 5/6 от 60 Гц и номинальной мощности л.с. , другие рабочие характеристики для режима 50 Гц следующие:
- Скорость
Синхронная скорость будет 5/6 от синхронной скорости 60 Гц, а скольжение будет составлять 6/5 от скольжения 60 Гц. - Крутящий момент
Номинальный крутящий момент нагрузки в фунт-футах будет примерно таким же, как номинальный момент нагрузки 60 Гц в фунт-футах. Моменты заторможенного ротора и пробойные моменты в фунт-футах двигателей с частотой 50 Гц будут примерно такими же, как у двигателей с заторможенным ротором 60 Гц и с моментами пробоя в фунт-футах. - Ток заторможенного ротора
Ток заторможенного ротора (ампер) будет примерно на 5 процентов меньше, чем ток заторможенного ротора 60 Гц (амперы).Буквенный код на паспортной табличке двигателя для обозначения KVA с заторможенным ротором на мощность применяется только для двигателя с номинальной частотой 60 Гц. - Коэффициент обслуживания
Коэффициент обслуживания будет 1,0. - Повышение температуры
Повышение температуры не должно превышать 90 ° C.

Влияние напряжения свыше 600 В на работу низковольтных двигателей:
Многофазные двигатели обычно изготавливаются для номинального напряжения 575 В или менее и, как ожидается, будут удовлетворительно работать при изменении напряжения на плюс или минус 10 процентов. Это означает, что двигатели с таким уровнем изоляции могут успешно применяться до рабочего напряжения 635 вольт.
Это означает, что двигатели с таким уровнем изоляции могут успешно применяться до рабочего напряжения 635 вольт.
На основании испытаний, проведенных производителями двигателей с высоким потенциалом, и эксплуатационных характеристик в полевых условиях, было обнаружено, что там, где рабочее напряжение превышает 635 вольт, коэффициент безопасности изоляции снижается до уровня, несовместимого с надлежащими инженерными процедурами.
Ввиду вышеизложенного, двигатели с этим уровнем изоляции не должны применяться в энергосистемах с заземленной нейтралью или без нее, где напряжение превышает 630 В, независимо от используемого подключения двигателя.
Электроприводы переменного тока — PetroWiki
Для многих приложений требуются двигатели с регулируемой скоростью. Самый простой способ изменить скорость асинхронного двигателя переменного тока — это использовать привод переменного тока для изменения применяемой частоты. Приводы переменного тока обычно известны как частотно-регулируемые приводы (VFD). VFD — это микропроцессорные контроллеры, которые включают в себя секцию электронного управления, секцию электромагнитного и полупроводникового питания, а также типовые компоненты, которые используются со стандартными контроллерами двигателей.ЧРП могут подавать напряжение на двигатели с частотой от <1 Гц до приблизительно 120 Гц. В настоящее время они доступны для двигателей мощностью от 0,33 л.с. до тысячи лошадиных сил. Работа двигателя с частотой и напряжением, отличными от номинальных, влияет на ток и крутящий момент двигателя. В следующих разделах дается дальнейшее обсуждение этого вопроса.
VFD — это микропроцессорные контроллеры, которые включают в себя секцию электронного управления, секцию электромагнитного и полупроводникового питания, а также типовые компоненты, которые используются со стандартными контроллерами двигателей.ЧРП могут подавать напряжение на двигатели с частотой от <1 Гц до приблизительно 120 Гц. В настоящее время они доступны для двигателей мощностью от 0,33 л.с. до тысячи лошадиных сил. Работа двигателя с частотой и напряжением, отличными от номинальных, влияет на ток и крутящий момент двигателя. В следующих разделах дается дальнейшее обсуждение этого вопроса.
Соотношение вольт на герц
Выходной крутящий момент двигателя определяется на основе отношения приложенного к двигателю напряжения и приложенной частоты, известного как соотношение вольт на герц (В / Гц).Типичный электродвигатель переменного тока, производимый для использования в США, рассчитан на 460 В переменного тока и 60 Гц, и, следовательно, имеет соотношение 7,67 В / Гц. Несоблюдение правильного соотношения В / Гц повлияет на крутящий момент двигателя, температуру, скорость, шум и потребление тока. Например, увеличение частоты без увеличения напряжения приведет к увеличению скорости и уменьшению плотности потока в воздушном зазоре. Уменьшение плотности потока в воздушном зазоре вызывает уменьшение крутящего момента двигателя, поскольку крутящий момент прямо пропорционален плотности магнитного потока в воздушном зазоре двигателя.Таким образом, чтобы двигатель создавал свой номинальный крутящий момент при переменной скорости, также необходимо контролировать напряжение и частоту, подаваемые на двигатель. Частотно-регулируемый привод поддерживает заданное соотношение В / Гц при подаче питания на двигатель с переменной скоростью.
Несоблюдение правильного соотношения В / Гц повлияет на крутящий момент двигателя, температуру, скорость, шум и потребление тока. Например, увеличение частоты без увеличения напряжения приведет к увеличению скорости и уменьшению плотности потока в воздушном зазоре. Уменьшение плотности потока в воздушном зазоре вызывает уменьшение крутящего момента двигателя, поскольку крутящий момент прямо пропорционален плотности магнитного потока в воздушном зазоре двигателя.Таким образом, чтобы двигатель создавал свой номинальный крутящий момент при переменной скорости, также необходимо контролировать напряжение и частоту, подаваемые на двигатель. Частотно-регулируемый привод поддерживает заданное соотношение В / Гц при подаче питания на двигатель с переменной скоростью.
Нагрузка с постоянным крутящим моментом
[[Alternating_current_motors | Двигатели переменного тока]], работающие от сети переменного тока, работают с постоянным магнитным потоком, потому что напряжение и частота постоянны. Говорят, что двигатели, работающие с постоянным магнитным потоком, имеют постоянный крутящий момент. Привод переменного тока может работать с двигателем с постоянным магнитным потоком от нуля до номинальной частоты двигателя, указанной на паспортной табличке (обычно 60 Гц), что является диапазоном постоянного крутящего момента.Пока поддерживается постоянное соотношение В / Гц, двигатель будет генерировать постоянный крутящий момент. Приводы переменного тока изменяют частоту для изменения скорости двигателя и пропорционально изменяют напряжение для поддержания постоянного магнитного потока. Отношение В / Гц можно поддерживать постоянным для любой скорости до 60 Гц. См. Рис.1 .
Говорят, что двигатели, работающие с постоянным магнитным потоком, имеют постоянный крутящий момент. Привод переменного тока может работать с двигателем с постоянным магнитным потоком от нуля до номинальной частоты двигателя, указанной на паспортной табличке (обычно 60 Гц), что является диапазоном постоянного крутящего момента.Пока поддерживается постоянное соотношение В / Гц, двигатель будет генерировать постоянный крутящий момент. Приводы переменного тока изменяют частоту для изменения скорости двигателя и пропорционально изменяют напряжение для поддержания постоянного магнитного потока. Отношение В / Гц можно поддерживать постоянным для любой скорости до 60 Гц. См. Рис.1 .
Рис. 1 — Постоянный крутящий момент и постоянная мощность (любезно предоставлено Houston Armature Works Inc.).
Некоторые примеры нагрузок с постоянным крутящим моментом: * конвейеры * поршневые насосы * экструдеры * гидравлические насосы * упаковочное оборудование
Постоянная мощность в лошадиных силах
В некоторых случаях требуется, чтобы двигатель работал с частотой вращения выше базовой. В таких приложениях требуется меньший крутящий момент на более высоких скоростях, но при этом требуется, чтобы напряжение не превышало номинальное напряжение, указанное на паспортной табличке, потому что изоляция двигателя ухудшается экспоненциально при напряжении выше номинального. Частотно-регулируемые приводы предназначены для поддержания постоянного соотношения В / Гц и крутящего момента до 60 Гц. Как показано в таблице , соотношение В / Гц уменьшается при частоте выше 60 Гц, поскольку частотно-регулируемые приводы предназначены для поддержания постоянного напряжения выше 60 Гц. Когда соотношение В / Гц уменьшается, магнитный поток в воздушном зазоре уменьшается, вызывая уменьшение крутящего момента.Поскольку мощность двигателя прямо пропорциональна крутящему моменту и скорости двигателя, она остается постоянной, в то время как крутящий момент уменьшается пропорционально увеличению частоты. Таким образом, двигатель, который работает с частотой выше своей номинальной, работает в области, известной как постоянная мощность (см.
В таких приложениях требуется меньший крутящий момент на более высоких скоростях, но при этом требуется, чтобы напряжение не превышало номинальное напряжение, указанное на паспортной табличке, потому что изоляция двигателя ухудшается экспоненциально при напряжении выше номинального. Частотно-регулируемые приводы предназначены для поддержания постоянного соотношения В / Гц и крутящего момента до 60 Гц. Как показано в таблице , соотношение В / Гц уменьшается при частоте выше 60 Гц, поскольку частотно-регулируемые приводы предназначены для поддержания постоянного напряжения выше 60 Гц. Когда соотношение В / Гц уменьшается, магнитный поток в воздушном зазоре уменьшается, вызывая уменьшение крутящего момента.Поскольку мощность двигателя прямо пропорциональна крутящему моменту и скорости двигателя, она остается постоянной, в то время как крутящий момент уменьшается пропорционально увеличению частоты. Таким образом, двигатель, который работает с частотой выше своей номинальной, работает в области, известной как постоянная мощность (см. Рис. 1 ).
Рис. 1 ).
Пуск пониженного напряжения и частоты
Двигатель Национальной ассоциации производителей электрооборудования (NEMA) B, который запускается путем подключения его к источнику питания с полным напряжением и полной частотой, развивает примерно 150% пускового момента и 600% пускового тока ( Рис.2 ). Тот же двигатель, запущенный с частотно-регулируемым приводом при пониженном напряжении и частоте, развивает примерно 150% крутящего момента и тока. Рис. 3 показывает, что кривая крутящего момента / скорости смещается вправо по мере увеличения частоты и напряжения. Пунктирные линии на кривой крутящего момента / скорости представляют собой часть кривой, не используемую приводом. Привод запускается и плавно ускоряет двигатель, поскольку частота и напряжение постепенно увеличиваются до желаемой скорости. Привод частотно-регулируемого привода, размер которого соответствует двигателю, способен выдавать 150% крутящего момента на любой скорости вплоть до скорости, соответствующей входящему линейному напряжению.
Рис. 2 — Типичная кривая скорости / крутящего момента для асинхронного двигателя NEMA-B (любезно предоставлено Houston Armature Works Inc.).
Рис. 3 — Скорость (частота) в зависимости от крутящего момента при полной нагрузке (любезно предоставлено Houston Armature Works Inc.).
В некоторых случаях требуется пусковой крутящий момент> 150%. Например, конвейеру для запуска может потребоваться 200% номинальный крутящий момент. Если двигатель способен на 200% крутящего момента при 200% тока, а привод способен на 200% тока, тогда возможен 200% крутящий момент двигателя.Обычно приводы способны производить 150% номинального тока привода в течение 1 минуты. Для нагрузки, которая требует большего пускового момента, чем может обеспечить привод, требуется привод с более высоким номинальным током. Если требуется высокий пиковый крутящий момент, целесообразно поставить привод с более высокой продолжительной мощностью, чем двигатель.
Выбор двигателя
Приводы переменного тока часто имеют больше возможностей, чем двигатель. Накопители могут работать на более высоких частотах, чем это может быть приемлемо для приложения.Например, на частотах выше 60 Гц соотношение В / Гц уменьшается, и двигатель не может развивать 100% крутящий момент. Приводы также могут работать на более низких скоростях, чем это может быть приемлемо. Например, двигатель с самоохлаждением может не развивать достаточный воздушный поток для охлаждения при пониженных скоростях и полной нагрузке. Каждый двигатель необходимо оценить на предмет его собственных возможностей, прежде чем выбирать его для использования в приводе переменного тока. Гармоники, скачки напряжения и время нарастания напряжения приводов переменного тока не идентичны. Некоторые приводы переменного тока имеют более сложные фильтры и другие компоненты, которые предназначены для минимизации нежелательного нагрева и повреждения изоляции двигателя.Это необходимо учитывать при выборе комбинации привод переменного тока / двигателя. Производители двигателей обычно классифицируют определенные рекомендуемые варианты двигателей на основе опыта, требуемого диапазона скоростей, типа крутящего момента нагрузки и температурных ограничений.
Производители двигателей обычно классифицируют определенные рекомендуемые варианты двигателей на основе опыта, требуемого диапазона скоростей, типа крутящего момента нагрузки и температурных ограничений.
Расстояние между приводом и двигателем
Также необходимо учитывать расстояние между приводом и двигателем. Все кабели двигателя имеют линейную емкость и емкость между фазой и землей. Чем длиннее кабель, тем больше емкость. Некоторые типы кабелей (например,g., экранированный кабель или кабели в металлической трубе) имеют большую емкость. Зарядный ток в емкости кабеля вызывает скачки на выходе приводов переменного тока; более высокое напряжение и большая емкость вызывают более высокие всплески тока. Скачки напряжения, вызванные большой длиной кабеля, могут сократить срок службы привода переменного тока и двигателя. При рассмотрении приложения, в котором расстояние может быть проблемой, обратитесь к производителю частотно-регулируемого привода за его рекомендациями.
Сервисный коэффициент для приводов переменного тока
Высокоэффективный двигатель с 1. При использовании с приводом переменного тока рекомендуется коэффициент обслуживания 15. Эксплуатационный коэффициент 1,15 снижен до 1,0 из-за тепла, связанного с гармониками привода переменного тока.
При использовании с приводом переменного тока рекомендуется коэффициент обслуживания 15. Эксплуатационный коэффициент 1,15 снижен до 1,0 из-за тепла, связанного с гармониками привода переменного тока.
Список литературы
Интересные статьи в OnePetro
Используйте этот раздел, чтобы перечислить статьи в OnePetro, которые читатель, желающий узнать больше, обязательно должен прочитать
См. Также
Электрические системы
Электрораспределительные системы
Двигатели переменного тока
Двигатели асинхронные
Синхронный двигатель
Технические характеристики двигателя
Характеристики двигателя NEMA
Корпуса двигателей
PEH: электрические_системы
Категория
Основы частотно-регулируемых приводов
Когда Тесла впервые представил трехфазный асинхронный двигатель переменного тока в 1888 году, он знал, что его изобретение более эффективно и надежно, чем двигатель постоянного тока Эдисона (DC). Однако для управления скоростью двигателя переменного тока требуется либо изменение магнитного потока, либо изменение числа полюсов двигателя. Даже спустя десятилетия после того, как асинхронный двигатель получил широкое распространение, изменение частоты для управления скоростью оставалось чрезвычайно сложной задачей, а физическая конструкция двигателя не позволяла производителям создавать двигатели с более чем двумя скоростями.
Однако для управления скоростью двигателя переменного тока требуется либо изменение магнитного потока, либо изменение числа полюсов двигателя. Даже спустя десятилетия после того, как асинхронный двигатель получил широкое распространение, изменение частоты для управления скоростью оставалось чрезвычайно сложной задачей, а физическая конструкция двигателя не позволяла производителям создавать двигатели с более чем двумя скоростями.
В результате двигатели постоянного тока были необходимы там, где требовались точный контроль скорости и значительная выходная мощность.В отличие от требований к управлению скоростью электродвигателя переменного тока, управление скоростью электродвигателя постоянного тока было достигнуто за счет включения реостата в цепь возбуждения постоянного тока малой мощности, что было осуществимо с использованием имеющихся технологий. Эти простые средства управления двигателем изменяли скорость и крутящий момент, и в течение ряда десятилетий были наиболее экономичным способом сделать это.
Рис. 1. Идеальная синусоида и форма сигнала ШИМ.
К 1980-м годам технология приводов двигателей переменного тока стала достаточно надежной и недорогой, чтобы конкурировать с традиционными системами управления двигателями постоянного тока.Эти частотно-регулируемые приводы (ЧРП) точно регулируют скорость стандартных асинхронных или синхронных двигателей переменного тока. При использовании частотно-регулируемых приводов управление скоростью с полным крутящим моментом достигается от 0 об / мин до максимальной номинальной скорости и, если требуется, выше номинальной скорости при пониженном крутящем моменте. ЧРП регулируют частоту своего выхода, преобразуя входящий переменный ток в постоянный, а затем используя широтно-импульсную модуляцию напряжения для воссоздания формы выходного переменного тока и напряжения. Однако этот процесс преобразования частоты вызывает потери от 2% до 3% в виде тепла в частотно-регулируемом приводе — калорийную энергию, которая должна рассеиваться. Процесс также приводит к скачкам перенапряжения и гармоническим искажениям тока.
Процесс также приводит к скачкам перенапряжения и гармоническим искажениям тока.
Типы частотно-регулируемых
Существует три распространенных типа частотно-регулируемых приводов. Инверсия источника тока (CSI) успешно используется в системах обработки сигналов и в промышленных энергетических приложениях. CSI VFD — единственный тип, который имеет возможность рекуперации энергии. Другими словами, они могут поглощать поток энергии, поступающий от двигателя к источнику питания. ЧРП CSI выдают очень чистую форму волны тока, но требуют больших и дорогих индукторов в своей конструкции и вызывают зубчатые колебания (пульсирующие движения во время вращения) ниже 6 Гц.
Приводыс инверсией источника напряжения (VSI) имеют низкий коэффициент мощности, могут вызывать зубцовый сдвиг двигателя ниже 6 Гц и не рекуперативны. Следовательно, диски CSI и VSI не получили широкого распространения.
ЧРП с широтно-импульсной модуляцией (ШИМ) чаще всего используются в промышленности из-за отличного входного коэффициента мощности за счет фиксированного напряжения на шине постоянного тока, отсутствия зубчатого зацепления двигателя, более высокого КПД и более низкой стоимости. ЧРП с ШИМ использует серию импульсов напряжения разной длины для имитации синусоидальной волны ( рис.1 на странице 8). В идеале импульсы синхронизированы так, чтобы средний интеграл привода по времени давал идеальную синусоиду. Текущий метод получения этой формы волны пропускает треугольную волну и синусоидальную волну через компаратор и выдает импульс напряжения всякий раз, когда значение синусоидальной волны больше, чем треугольная волна. В качестве электрического компонента тока для генерации импульса напряжения используется биполярный транзистор с изолированным затвором (IGBT), хотя кремниевые выпрямители (SCR) также могут работать.В ближайшем будущем для выполнения этой задачи будут использоваться затворные транзисторы с усиленной инжекцией (IEGT). В более долгосрочной перспективе мемристоры, вероятно, станут предпочтительным компонентом для этой задачи.
ЧРП с ШИМ использует серию импульсов напряжения разной длины для имитации синусоидальной волны ( рис.1 на странице 8). В идеале импульсы синхронизированы так, чтобы средний интеграл привода по времени давал идеальную синусоиду. Текущий метод получения этой формы волны пропускает треугольную волну и синусоидальную волну через компаратор и выдает импульс напряжения всякий раз, когда значение синусоидальной волны больше, чем треугольная волна. В качестве электрического компонента тока для генерации импульса напряжения используется биполярный транзистор с изолированным затвором (IGBT), хотя кремниевые выпрямители (SCR) также могут работать.В ближайшем будущем для выполнения этой задачи будут использоваться затворные транзисторы с усиленной инжекцией (IEGT). В более долгосрочной перспективе мемристоры, вероятно, станут предпочтительным компонентом для этой задачи.
Мемристоры — четвертый пассивный элемент схемы, связывающий электрический заряд и магнитный поток. Предполагается, что мемристоры существуют уже более 30 лет, но не были изготовлены до апреля 2008 года в Hewlett Packard Labs. Hewlett Packard надеется использовать эти устройства в качестве пассивных транзисторов, уменьшая их тепловыделение по сравнению с другими типами памяти.Независимо от компонента, используемого для формирования синусоидальной волны, переключение вызывает проблемы.
Hewlett Packard надеется использовать эти устройства в качестве пассивных транзисторов, уменьшая их тепловыделение по сравнению с другими типами памяти.Независимо от компонента, используемого для формирования синусоидальной волны, переключение вызывает проблемы.
Тепло, потери мощности и гармоники
Первая проблема, которую необходимо решить производителю частотно-регулируемого привода, — это нагрев. Хотя частотно-регулируемые приводы являются высокоэффективными устройствами, производители не могут создать идеальный набор компонентов. Потери тепла в приводе регулируются следующим уравнением:
H потеря = P t (1-η)
Где H loss — это потеря мощности (Вт), P t — мощность, проходящая через привод (Вт), а η — эффективность привода.Обычно ЧРП имеют рейтинг эффективности от 95% до 98%. Это означает, что количество воздуха, которое должно пройти через привод, определяется уравнением:
м = H потери ÷ (C p ΔT) = P t (1-η) ÷ (C p ΔT)
Где m — массовый расход (кг / с), C p — удельная теплоемкость воздуха [кДж ÷ (кг × K)], а ΔT — разница температур между входящим и выходящим воздухом ( К). Это тепло может вызвать значительные затраты на охлаждение, которые будут добавлены к конструкции, особенно если привод не может быть размещен в неклассифицированном месте (в зоне, свободной от горючих газов или частиц).Если привод должен быть размещен в засекреченном месте, то воздушный поток, идущий к приводу, необходимо будет продуть и создать давление.
Это тепло может вызвать значительные затраты на охлаждение, которые будут добавлены к конструкции, особенно если привод не может быть размещен в неклассифицированном месте (в зоне, свободной от горючих газов или частиц).Если привод должен быть размещен в засекреченном месте, то воздушный поток, идущий к приводу, необходимо будет продуть и создать давление.
Рис. 2. Реальная синусоида и форма сигнала ШИМ. Обратите внимание, как гармоники влияют на форму синусоиды.
Нагрев — это только одна из проблем частотно-регулируемых приводов. Другая серьезная проблема связана с системными гармониками. Изображение ШИМ и вызываемых ими гармоник показано на рис. Рис. 2 . Неровности синусоидальной волны называются гармониками.В идеальном мире силовых цепей этих гармоник не должно быть. Они ничего не делают, но создают проблемы. К счастью, есть несколько способов уменьшить гармоники.
Один из простейших методов борьбы с гармониками — разместить синусоидальный фильтр по обе стороны от частотно-регулируемого привода. Со стороны линии они обычно называются линейными реакторами и имеют значения реактивного сопротивления от 1,5% до 5,0% полного сопротивления. Более высокий импеданс не только задерживает больше гармоник, но также ограничивает мощность, поступающую на частотно-регулируемый привод.
Со стороны линии они обычно называются линейными реакторами и имеют значения реактивного сопротивления от 1,5% до 5,0% полного сопротивления. Более высокий импеданс не только задерживает больше гармоник, но также ограничивает мощность, поступающую на частотно-регулируемый привод.
Еще одна тактика, которую можно использовать на линейной стороне частотно-регулируемого привода, — это разместить конденсаторы на общей шине. Поскольку импеданс конденсатора обратно пропорционален частоте сигнала, гармоники видят короткое замыкание через конденсатор и проходят через конденсатор на землю, игнорируя другие нагрузки на шине. VFD также могут использовать активный интерфейс для ограничения гармоник, которые видит сторона линии. Активный входной каскад имеет еще один переключатель IGBT с обратным напряжением в качестве основного IGBT, но он проходит через фильтр верхних частот, так что основной сигнал мощности идет на землю.В идеале сумма двух гармонических сигналов должна быть равна нулю. Если активный внешний привод по какой-либо причине не подходит, можно приобрести пассивный внешний VFD. В пассивных интерфейсных преобразователях частоты используются несколько фазосдвигающих трансформаторов и диодные мосты для подавления гармоник.
В пассивных интерфейсных преобразователях частоты используются несколько фазосдвигающих трансформаторов и диодные мосты для подавления гармоник.
Чем больше импульсов у пассивного внешнего частотно-регулируемого привода, тем меньше проблем с гармониками. Компромисс заключается в том, что линейные напряжения должны быть хорошо сбалансированы, а каждый дополнительный фазосдвигающий трансформатор увеличивает стоимость и снижает эффективность.В крайних случаях можно приобрести изолирующий трансформатор. Хотя это один из наиболее эффективных способов предотвращения распространения гармоник, он также является одним из самых дорогостоящих.
Если гармоники недостаточно подавлены на линии VFD, могут возникнуть перекрестные помехи и перегрев. Перегрев может привести к уменьшению размеров шины или увеличению затрат на охлаждение. Перекрестные помехи определяются как сигнал от одной цепи, создающей помехи другой цепи. Вообще говоря, это более серьезная проблема, чем перегрев.Примером может служить радиоприемник, который слегка расстроен. Несмотря на то, что через помехи можно слышать музыку, статика раздражает. Перекрестные помехи — это раздражающая вещь в телекоммуникационных сетях. В силовых цепях перекрестные помехи вызовут перегрев и срабатывание реле частоты.
Несмотря на то, что через помехи можно слышать музыку, статика раздражает. Перекрестные помехи — это раздражающая вещь в телекоммуникационных сетях. В силовых цепях перекрестные помехи вызовут перегрев и срабатывание реле частоты.
Подобно тому, как гармоники, оставленные неотмеченными на стороне линии, могут вызывать проблемы, они могут создавать проблемы и на стороне нагрузки. Это из-за природы волн. Например, небольшое усилие, приложенное к Slinky с обоих концов, вызовет синусоидальную волну большой амплитуды.Электромагнитные волны действуют таким же образом, а это означает, что небольшое реактивное сопротивление может вызвать большие скачки напряжения. Поскольку это реактивное сопротивление является индуктивным по своей природе, большинство выходных фильтров представляют собой конденсаторы, подключенные по схеме треугольника. В идеале это должно сделать реактивную часть импеданса равной нулю. Если полное сопротивление подобрано правильно, этого не произойдет.
Внимание! Конденсаторы, подключенные на стороне нагрузки частотно-регулируемого привода, могут создать большое количество проблем, вплоть до выхода из строя привода. Поэтому перед установкой синусоидального фильтра на стороне нагрузки частотно-регулируемого привода рекомендуется проконсультироваться с производителем привода. В редких случаях может использоваться активный фильтр. Хотя они, как правило, работают хорошо, они довольно дороги и обычно должны разрабатываться индивидуально.
Поэтому перед установкой синусоидального фильтра на стороне нагрузки частотно-регулируемого привода рекомендуется проконсультироваться с производителем привода. В редких случаях может использоваться активный фильтр. Хотя они, как правило, работают хорошо, они довольно дороги и обычно должны разрабатываться индивидуально.
Преимущества ЧРП
Несмотря на то, что частотно-регулируемые приводы генерируют большое количество гармоник и тепла, они не были бы так широко распространены и популярны, как сегодня, если бы не имели значительной экономической выгоды.
Электрически частотно-регулируемые приводы работают с высоким коэффициентом мощности. Асинхронные двигатели любого класса обычно имеют низкий коэффициент мощности при нагрузке на половину и три четверти (от 0,75 до 0,85). Это фактически сокращает срок службы двигателя, поскольку из-за ненужного увеличения тока происходит перегрев изоляции обмотки. VFD обходят эту проблему, управляя нагрузкой с частотой ниже основной.
Самая очевидная причина для приобретения частотно-регулируемого привода — это регулирование скорости. Обычно это делается для технологических, эксплуатационных и экономических выгод.Одно экономическое преимущество заключается в сокращении объема технического обслуживания при использовании частотно-регулируемого привода, особенно при отсутствии необходимости иметь дело с угольными щетками двигателя постоянного тока или механическими коробками передач (трансмиссиями) с регулировкой скорости. Наиболее очевидные экономические преимущества частотно-регулируемых приводов связаны с вентиляторами и насосами. Мощность, которую потребляет насос или вентилятор, прямо пропорциональна кубу скорости. Это означает, что если оператор может запустить вентилятор на 80% от полной скорости, теоретически он использует 51% от полной мощности нагрузки.
ЧРП также оптимизируют пусковые характеристики двигателя.Частотно-регулируемые приводы быстро разгоняют двигатели до полной скорости и потребляют от 100% до 150% тока полной нагрузки (FLA). Эта возможность пуска с нормальным значением FLA очень важна, если источник питания не может выдержать обычно шестикратное значение FLA при пуске через линию или даже ток устройства плавного пуска в размере 350% FLA. ЧРП делают это, управляя магнитным потоком асинхронного двигателя. Магнитный поток прямо пропорционален напряжению и обратно пропорционален частоте. При поддержании постоянного магнитного потока пусковой ток не превышает номинального значения FLA двигателя, и сохраняется полный крутящий момент.Это значительное улучшение по сравнению с плавным пуском, который имеет значительные проблемы с падением напряжения и не может запускаться при полной нагрузке.
Эта возможность пуска с нормальным значением FLA очень важна, если источник питания не может выдержать обычно шестикратное значение FLA при пуске через линию или даже ток устройства плавного пуска в размере 350% FLA. ЧРП делают это, управляя магнитным потоком асинхронного двигателя. Магнитный поток прямо пропорционален напряжению и обратно пропорционален частоте. При поддержании постоянного магнитного потока пусковой ток не превышает номинального значения FLA двигателя, и сохраняется полный крутящий момент.Это значительное улучшение по сравнению с плавным пуском, который имеет значительные проблемы с падением напряжения и не может запускаться при полной нагрузке.
Другой потенциально полезный аспект частотно-регулируемых приводов продемонстрирован на рис. 3 (щелкните здесь, чтобы увидеть рис. 3 ), который показывает выходной сигнал частотно-регулируемого привода с постоянным крутящим моментом. Обратите внимание на две области: постоянный крутящий момент и постоянную мощность. Область постоянного крутящего момента не требует пояснений; ЧРП регулирует поток так, чтобы ток был постоянным.Когда частотный преобразователь частоты превышает номинальную частоту системы, напряжение не может увеличиваться из-за физических ограничений системы. Поскольку напряжение статическое, а частота увеличивается, поток вынужден уменьшаться. Когда это происходит, ток и крутящий момент также уменьшаются. Это называется ослаблением поля. Хотя это не обязательно хорошо, это может быть полезно, если есть потребность в питании нагрузки с частичным крутящим моментом выше номинальной скорости. В дополнение к этой возможности, частотно-регулируемые приводы также могут принимать любую форму входного питания, будь то однофазный переменный ток, трехфазный переменный ток или постоянный ток.ЧРП, питаемые от источника постоянного тока, по-прежнему питают нагрузку переменного тока без внутреннего выпрямителя.
Область постоянного крутящего момента не требует пояснений; ЧРП регулирует поток так, чтобы ток был постоянным.Когда частотный преобразователь частоты превышает номинальную частоту системы, напряжение не может увеличиваться из-за физических ограничений системы. Поскольку напряжение статическое, а частота увеличивается, поток вынужден уменьшаться. Когда это происходит, ток и крутящий момент также уменьшаются. Это называется ослаблением поля. Хотя это не обязательно хорошо, это может быть полезно, если есть потребность в питании нагрузки с частичным крутящим моментом выше номинальной скорости. В дополнение к этой возможности, частотно-регулируемые приводы также могут принимать любую форму входного питания, будь то однофазный переменный ток, трехфазный переменный ток или постоянный ток.ЧРП, питаемые от источника постоянного тока, по-прежнему питают нагрузку переменного тока без внутреннего выпрямителя.
также могут применяться в электросетях. Одним из классических примеров этого является индукционный генератор с двойным питанием, в котором частотно-регулируемый привод может выдавать сигнал фиксированной частоты и напряжения на вход переменной скорости (частоты). Это обычно наблюдается в ветряных турбинах и других проектах малых гидроэлектростанций, которые будут подключены к электросети. Другие возобновляемые источники энергии, такие как фотоэлектрические элементы, могут использовать частотно-регулируемые приводы для работы в качестве инвертора перед подключением к электросети, хотя инверторы с понижающей-повышающей технологией встречаются чаще.Хотя существует множество потенциальных применений частотно-регулируемых приводов в коммерческой электросети, они выходят за рамки данной статьи.
Это обычно наблюдается в ветряных турбинах и других проектах малых гидроэлектростанций, которые будут подключены к электросети. Другие возобновляемые источники энергии, такие как фотоэлектрические элементы, могут использовать частотно-регулируемые приводы для работы в качестве инвертора перед подключением к электросети, хотя инверторы с понижающей-повышающей технологией встречаются чаще.Хотя существует множество потенциальных применений частотно-регулируемых приводов в коммерческой электросети, они выходят за рамки данной статьи.
Таким образом, всякий раз, когда нагрузка имеет переменный крутящий момент или переменную скорость, следует рассмотреть возможность использования частотно-регулируемого привода. VFD можно рассмотреть, если у большого двигателя есть проблема с падением напряжения, крутящим моментом или пусковым током во время запуска. Несмотря на то, что частотно-регулируемые приводы, несомненно, решают изрядное количество проблем и обеспечивают значительную экономию энергии, выделяемое ими тепло необходимо рассеивать, а создаваемые ими гармоники необходимо ослаблять.
Новак — инженер-электрик в компании Fluor, Inc., Шугар Ленд, Техас. С ним можно связаться по телефону [email protected].
Основы частотно-регулируемых приводов двигателей
Двигатели постоянного тока исторически имели преимущества в том, что их скорость и направление вращения можно было легко контролировать, регулируя или переключая напряжение питания. Это сделало их подходящими для лифтов, приводов лыжных подъемников и аналогичных приложений, требующих плавной и надежной работы.
По сравнению с аналогичными двигателями постоянного тока трехфазные асинхронные двигатели относительно легкие и недорогие в производстве и обслуживании.Большая проблема заключалась в том, что до последних десятилетий было нелегко контролировать скорость. Вы могли уменьшить напряжение питания, чтобы замедлить двигатель, но это было равносильно замене менее мощного двигателя и его перегрузке. Результатом стало повышенное энергопотребление, повышение температуры и сокращение срока службы. Точно так же, в отличие от двигателя постоянного тока, где вращение можно изменить на противоположное, просто переключив провода, однофазный двигатель переменного тока потребует дополнительной обратной обмотки или аналогичного приспособления.
Точно так же, в отличие от двигателя постоянного тока, где вращение можно изменить на противоположное, просто переключив провода, однофазный двигатель переменного тока потребует дополнительной обратной обмотки или аналогичного приспособления.
В начале 1960-х годов появилась новая элегантная технология, которая позволила двигателям переменного тока легко регулировать скорость.Приводы с регулируемой частотой (VFD) — также правильно называемые приводами с регулируемой скоростью, приводами с регулируемой скоростью, частотно-регулируемыми приводами, микроприводами и инверторами моторных приводов — могут быть оснащены интерфейсом оператора для контроля и управления индукционным (асинхронным) или синхронным двигатель переменного тока.
VFD может относиться только к устройству управления или к двигателю и приводному оборудованию. Учитывая его большую функциональность и высокую мощность, ЧРП прост и надежен. Режимы отказа чаще всего связаны с источником питания, кабелями или приводным оборудованием.
Устранение неисправностей несложно, хотя рекомендуется проявлять осторожность из-за промышленных напряжений и опасности возникновения дуги, типичной для окружающей среды. Остерегайтесь накопленного напряжения, которое может сохраняться в конденсаторах долгое время после отключения питания. Необходимо проявлять особую осторожность, чтобы убедиться, что источник питания заблокирован и нет возможности обратного питания, чтобы двигатель и приводимое оборудование не могли неожиданно запуститься.
Преобразователи частотыимеют довольно простую схему. Источник питания должен быть обеспечен безаварийным отключением.Он также должен проходить через проводники соответствующей токовой нагрузки с защитой от короткого замыкания и замыкания на землю и с отдельной защитой от перегрузки для двигателя.
Большинство таких систем являются трехфазными, с питанием от переменного тока 480 В, хотя возможна и однофазная. Три ответвительных проводника (плюс провод заземления оборудования) входят в корпус и заканчиваются на входе в секцию выпрямителя. Диодная сеть обеспечивает двухполупериодное выпрямление. Важнейшая функция фильтрации — через большие электролитические конденсаторы с добавленной индуктивностью или без нее.
Диодная сеть обеспечивает двухполупериодное выпрямление. Важнейшая функция фильтрации — через большие электролитические конденсаторы с добавленной индуктивностью или без нее.
Выход перемещается по шине постоянного тока в секцию инвертора, где синтезируется подходящий выход переменного тока для питания двигателя. Инвертор регулирует напряжение и частоту двигателя с помощью широтно-импульсной модуляции (ШИМ). Управление, автоматическое или ручное, происходит извне. Человек с операторского интерфейса может дать команду двигателю реверсировать, ускоряться или замедляться, запускать или останавливать. Также можно контролировать или изменять параметры крутящего момента. Соответствующие сигналы отправляются в секцию инвертора VFD, которая питается от буферного постоянного напряжения, которое фактически равно 1.В 414 раз больше размаха напряжения в линии переменного тока. Переключение осуществляется в секции инвертора биполярными транзисторами с изолированным затвором (IGBT), которые, в зависимости от емкости частотно-регулируемого привода, могут приводить в действие двигатели мощностью 500 л. с.
с.
Неисправность системы может проявляться в виде перегрева, что обычно является прелюдией к отказу двигателя. В большом двигателе отказ двигателя обходится дорого, и время простоя также необходимо учитывать. Эти факторы можно смягчить, если периодически снимать показания температуры, чтобы заранее выявить опасные тенденции.
Кабель от частотно-регулируемого привода к двигателю может быть проблематичным. Важно посмотреть, появились ли симптомы постепенно или присутствуют при запуске. Повышенный импеданс или вредные отражения сигнала снижают общую эффективность системы. В суровых заводских условиях заделки или кабель могут выйти из строя. В качестве альтернативы, в процессе проектирования и монтажа кабель мог быть слишком длинным или проложен близко к нелинейной нагрузке.
Проектирование, обслуживание и установка частотно-регулируемого привода, а также промышленной электроники в целом сильно влияют на производительность.Но после установки и обкатки частотно-регулируемые приводы обычно безотказно работают годами.