
Асинхронный двигатель. Устройство и принцип действия однофазного и трехфазного асинхронного электродвигателя.
Асинхронные электродвигатели (АД) находят в народном хозяйстве широкое применение. По разным данным до 70% всей электрической энергии, преобразуемой в механическую энергию вращательного или поступательного движения, потребляется асинхронным двигателем. Электрическую энергию в механическую энергию поступательного движения преобразуют линейные асинхронные электродвигатели, которые широко используются в электрической тяге, для выполнения технологических операций. Широкое применение АД связано с рядом их достоинств. Асинхронные двигатели — это самые простые в конструктивном отношении и в изготовлении, надежные и самые дешевые из всех типов электрических двигателей. Они не имеют щеточноколлекторного узла либо узла скользящего токосъема, что помимо высокой надежности обеспечивает минимальные эксплуатационные расходы. В зависимости от числа питающих фаз различают трехфазные и однофазные асинхронные двигатели.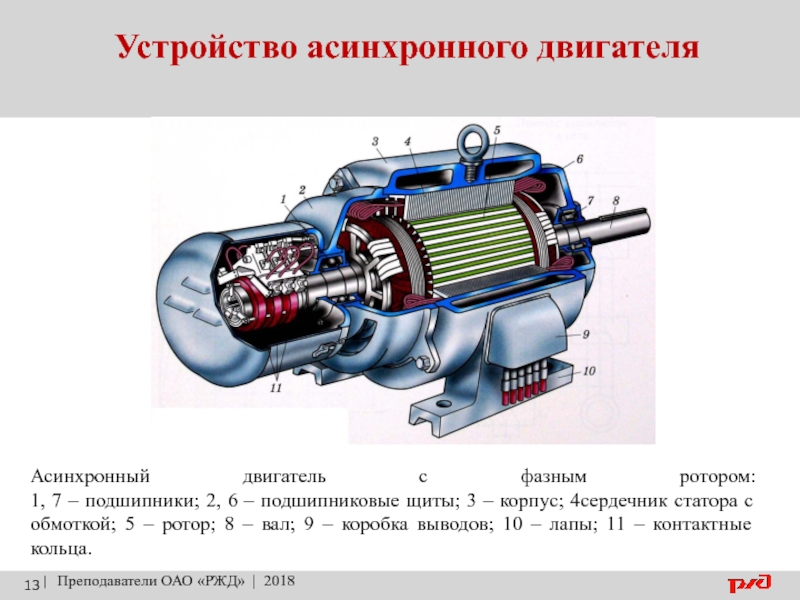
1. Устройство трехфазных асинхронных двигателей
Трехфазный асинхронный двигатель (АД) традиционного исполнения, обеспечивающий вращательное движение, представляет собой электрическую машину, состоящую из двух основных частей: неподвижного статора и ротора, вращающегося на валу двигателя. Статор двигателя состоит из станины, в которую впрессовывают так называемое электромагнитное ядро статора, включающее магнитопровод и трехфазную распределенную обмотку статора. Назначение ядра — намагничивание машины или создание вращающегося магнитного поля. Магнитопровод статора состоит из тонких (от 0,28 до 1 Мм) изолированных друг от друга листов, штампованных из специальной электротехнической стали.
Рис. 1 Магнитопровод статора
В пазы магнитопровода укладывается распределенная трехфазная обмотка статора. Обмотка в простейшем случае состоит из трех фазных катушек, оси которых сдвинуты в пространстве по отношению друг к другу на 120°. Фазные катушки соединяют между собой по схемам звезда, либо треугольник (рис. 2).
Рис 2. Схемы соединения фазных обмоток трехфазного асинхронного двигателя в звезду и в треугольник
Более подробные сведения о схемах соединения и условных обозначениях начал и концов обмоток представлены ниже. Ротор двигателя состоит из магнитопровода, также набранного из штампованных листов стали, с выполненными в нем пазами, в которых располагается обмотка ротора.
Рис. 3. Ротор аснхронного двигателя с короткозамкнутой обмоткой
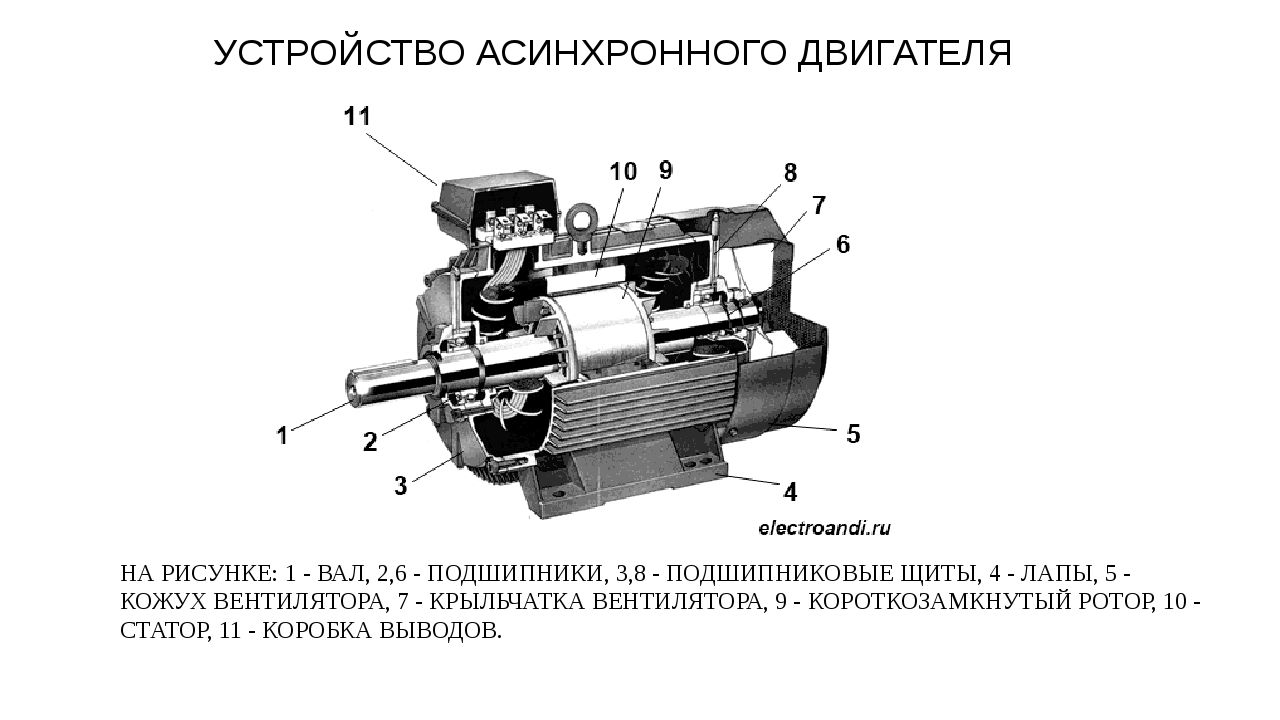
Общий вид асинхронного двигателя серии 4А представлен на рис. 4 [2]. Ротор 5 напрессовывается на вал 2 и устанавливается на подшипниках 1 и 11 в расточке статора в подшипниковых щитах 3 и 9, которые прикрепляются к торцам статора 6 с двух сторон. К свободному концу вала 2 присоединяют нагрузку. На другом конце вала укрепляют вентилятор 10 (двигатель закрытого обдуваемого исполнения), который закрывается колпаком 12. Вентилятор обеспечивает более интенсивное отведение тепла от двигателя для достижения соответствующей нагрузочной способности. Для лучшей теплоотдачи станину отливают с ребрами 13 практически по всей поверхности станины. Статор и ротор разделены воздушным зазором, который для машин небольшой мощности находится в пределах от 0,2 до 0,5 мм. Для прикрепления двигателя к фундаменту, раме или непосредственно к приводимому в движение механизму на станине предусмотрены лапы 14 с отверстиями для крепления.
Рис. 4. Общий вид асинхронного двигателя серии 4А
Выпускаются также двигатели, имеющие и лапы, и фланец. Установочные размеры двигателей (расстояние между отверстиями на лапах или фланцах), а также их высоты оси вращения нормируются. Высота оси вращения — это расстояние от плоскости, на которой расположен двигатель, до оси вращения вала ротора. Высоты осей вращения двигателей небольшой мощности: 50, 56, 63, 71, 80, 90, 100 мм.
2. Принцип действия трехфазных асинхронных двигателей
Выше отмечалось, что трехфазная обмотка статора служит для намагничивания машины или создания так называемого вращающегося магнитного поля двигателя. В основе принципа действия асинхронного двигателя лежит закон электромагнитной индукции.
Рис. 5. Опыт Араго, объясняющий принцип работы асинхронного двигателя
Это явление объясняется на основе закона электромагнитной индукции. При движении полюсов магнита около поверхности диска в контурах под полюсом наводится электродвижущая сила и появляются токи, которые создают магнитное поле диска. Читатель, которому трудно представить проводящие контуры в сплошном диске, может изобразить диск в виде колеса со множеством проводящих ток спиц, соединенных ободом и втулкой. Две спицы, а также соединяющие их сегменты обода и втулки и представляют собой элементарный контур. Поле диска сцепляется с полем полюсов вращающегося постоянного магнита, и диск увлекается собственным магнитным полем. Очевидно, наибольшая электродвижущая сила будет наводиться в контурах диска тогда, когда диск неподвижен, и напротив, наименьшая, когда близка к скорости вращения диска. Перейдя к реальному
Читатель, которому трудно представить проводящие контуры в сплошном диске, может изобразить диск в виде колеса со множеством проводящих ток спиц, соединенных ободом и втулкой. Две спицы, а также соединяющие их сегменты обода и втулки и представляют собой элементарный контур. Поле диска сцепляется с полем полюсов вращающегося постоянного магнита, и диск увлекается собственным магнитным полем. Очевидно, наибольшая электродвижущая сила будет наводиться в контурах диска тогда, когда диск неподвижен, и напротив, наименьшая, когда близка к скорости вращения диска. Перейдя к реальному
Алиев И.И.
Управление частотным преобразователем, векторное, скалярное.
Компания Русэлком производит и поставляет преобразователи частоты для управления асинхронными двигателями. Поэтому для понимания принципа частотного управления рассмотрим более детально работу асинхронного двигателя и методы его частотного регулирования
Конструкция асинхронного двигателя схематически изображена на рис. 2. Двигатель состоит из неподвижной части, которая называется статор и подвижной (вращающейся) части называемой ротор.
В пазах статора уложены три группы обмоток А-В-С. Обмотки статора сдвинуты друг относительно друга в пространстве на угол 120°. Это является одним из двух обязательных условий для создания вращающегося магнитного поля статора.
Ротор двигателя изготовлен в виде цельного цилиндра из специальной электротехнической стали с короткозамкнутой обмоткой.
Рис.2. Схематический разрез асинхронного двигателя.
На обмотки статора от источника питания подается трехфазное напряжение uа, uв, uс с частотой
Напряжения uа, uв, uс сдвинуты друг относительно друга по фазе на 120°. Это является вторым обязательным условием для создания вращающегося магнитного поля статора.
Это является вторым обязательным условием для создания вращающегося магнитного поля статора.
При питании обмоток статора электрического двигателя трехфазным напряжением с частотой создается вращающееся магнитное поле. Угловая скорость вращения этого поля в радианах определяется по известной формуле
– число пар полюсов статора.
Переход от угловой скорости вращения поля измеряемой в радианах, к частоте вращения выраженной в оборотах в минуту, осуществляется по следующей формуле
где 60 – коэффициент пересчета размерности.
Подставив в это уравнение скорость вращения поля, получим, что
Из формулы видно, что частота вращения магнитного поля статора зависит от частоты напряжения питания и числа пар полюсов.
К примеру, в двигателе с одной парой полюсов при частоте питающего напряжения 50 Гц частота вращения магнитного поля равна 3000 об/мин.
В синхронном электрическом двигателе частота вращения ротора на установившемся режиме равна частоте вращения магнитного поля статора
В асинхронном электрическом двигателе частота вращения ротора на установившемся режиме отличается от частоты вращения на величину скольжения .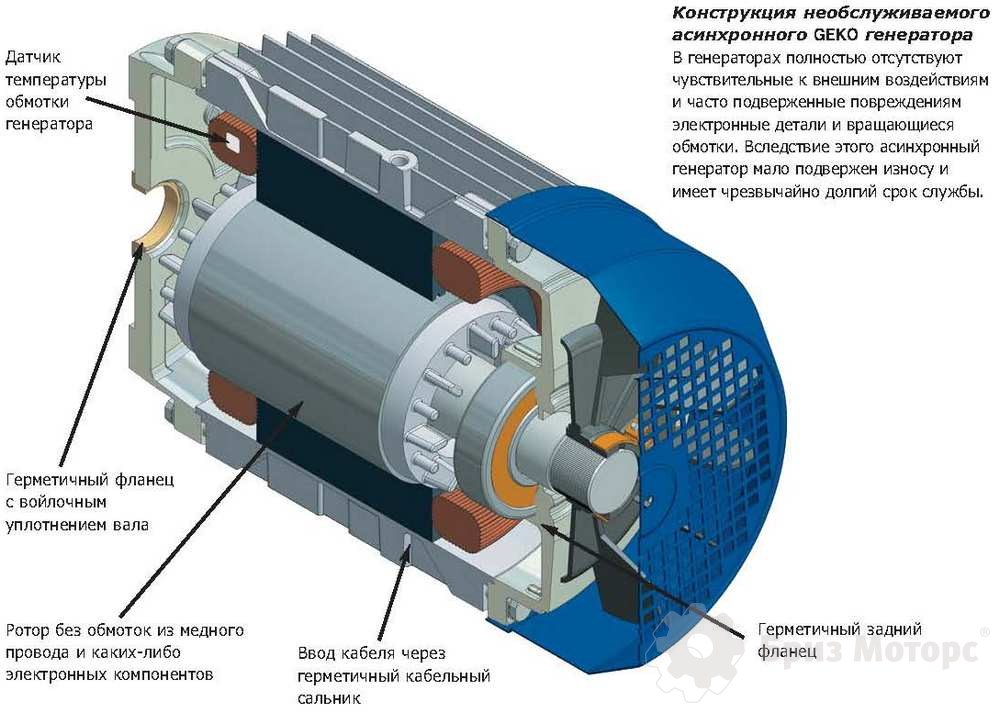 Для примера в асинхронном двигателе с одной парой полюсов при частоте питающего напряжения 50 Гц и при скольжении 5% частота вращения ротора равна 2850 об/мин.
Для примера в асинхронном двигателе с одной парой полюсов при частоте питающего напряжения 50 Гц и при скольжении 5% частота вращения ротора равна 2850 об/мин.
Таким образом, частота вращения ротора синхронного и асинхронного двигателей зависит от частоты напряжения питания.
На этой зависимости и основан метод частотного регулирования.
Изменяя с помощью преобразователя частоту на входе двигателя, мы регулируем частоту вращения ротора.
В наиболее распространенном частотно регулируемом приводе на основе асинхронных двигателей с короткозамкнутым ротором применяются скалярное и векторное частотное управление.
При скалярном управлении по определенному закону изменяют амплитуду и частоту приложенного к двигателю напряжения. Изменение частоты питающего напряжения приводит к отклонению от расчетных значений максимального и пускового моментов двигателя, к.п.д., коэффициента мощности. Поэтому для поддержания требуемых рабочих характеристик двигателя необходимо с изменением частоты одновременно соответственно изменять и амплитуду напряжения.
В существующих преобразователях частоты при скалярном управлении чаще всего поддерживается постоянным отношение максимального момента двигателя к моменту сопротивления на валу. То есть при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным. Это отношение называется перегрузочная способность двигателя.
При постоянстве перегрузочной способности номинальные коэффициент мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
Максимальный момент, развиваемый двигателем, определяется следующей зависимостью
где — постоянный коэффициент.
Поэтому зависимость напряжения питания от частоты определяется характером нагрузки на валу электрического двигателя.
Для постоянного момента нагрузки поддерживается отношение U/f = const, и, по сути, обеспечивается постоянство максимального момента двигателя. Характер зависимости напряжения питания от частоты для случая с постоянным моментом нагрузки изображен на рис. 2. Угол наклона прямой на графике зависит от величин момента сопротивления и максимального крутящего момента двигателя.
Характер зависимости напряжения питания от частоты для случая с постоянным моментом нагрузки изображен на рис. 2. Угол наклона прямой на графике зависит от величин момента сопротивления и максимального крутящего момента двигателя.
Вместе с тем на малых частотах, начиная с некоторого значения частоты, максимальный момент двигателя начинает падать. Для компенсации этого и для увеличения пускового момента используется повышение уровня напряжения питания.
В случае вентиляторной нагрузки реализуется зависимость U/f2 = const. Характер зависимости напряжения питания от частоты для этого случая показан на рис.3. При регулировании в области малых частот максимальный момент также уменьшается, но для данного типа нагрузки это некритично.
Используя зависимость максимального крутящего момента от напряжения и частоты, можно построить график U от f для любого типа нагрузки.
Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей.
Скалярное управление достаточно для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1: 40.
Векторное управление позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя.
Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление».
Для управления вектором тока, а, следовательно, положением магнитного потока статора относительно вращающегося ротора требуется знать точное положение ротора в любой момент времени. Задача решается либо с помощью выносного датчика положения ротора, либо определением положения ротора путем вычислений по другим параметрам двигателя. В качестве этих параметров используются токи и напряжения статорных обмоток.
В качестве этих параметров используются токи и напряжения статорных обмоток.
Менее дорогим является частотно регулируемый электропривод с векторным управлением без датчика обратной связи скорости, однако векторное управление при этом требует большого объема и высокой скорости вычислений от преобразователя частоты.
Кроме того, для непосредственного управления моментом при малых, близких к нулевым скоростям вращения работа частотно регулируемого электропривода без обратной связи по скорости невозможна.
Векторное управление с датчиком обратной связи скорости обеспечивает диапазон регулирования до 1:1000 и выше, точность регулирования по скорости – сотые доли процента, точность по моменту – единицы процентов.
В синхронном частотно регулируемом приводе применяются те же методы управления, что и в асинхронном.
Однако в чистом виде частотное регулирование частоты вращения синхронных двигателей применяется только при малых мощностях, когда нагрузочные моменты невелики, и мала инерция приводного механизма. При больших мощностях этим условиям полностью отвечает лишь привод с вентиляторной нагрузкой. В случаях с другими типами нагрузки двигатель может выпасть из синхронизма.
При больших мощностях этим условиям полностью отвечает лишь привод с вентиляторной нагрузкой. В случаях с другими типами нагрузки двигатель может выпасть из синхронизма.
Для синхронных электроприводов большой мощности применяется метод частотного управления с самосинхронизацией, который исключает выпадение двигателя из синхронизма. Особенность метода состоит в том, что управление преобразователем частоты осуществляется в строгом соответствии с положением ротора двигателя.
Обмотки ротора асинхронного двигателя
- Подробности
- Категория: Электрические машины
Вращающаяся часть асинхронного двигателя — ротор, так же как и статор, имеет обмотку. Она помещена в пазах 1 стального цилиндра, набранного, как и сердечник статора, из листов электротехнической стали толщиной 0,5 мм. После штамповки листы собирают в пакет, плотно сжимают, насаживают на вал двигателя и закрепляют. В пазах ротора помещается или короткозамкнутая, или фазная обмотка.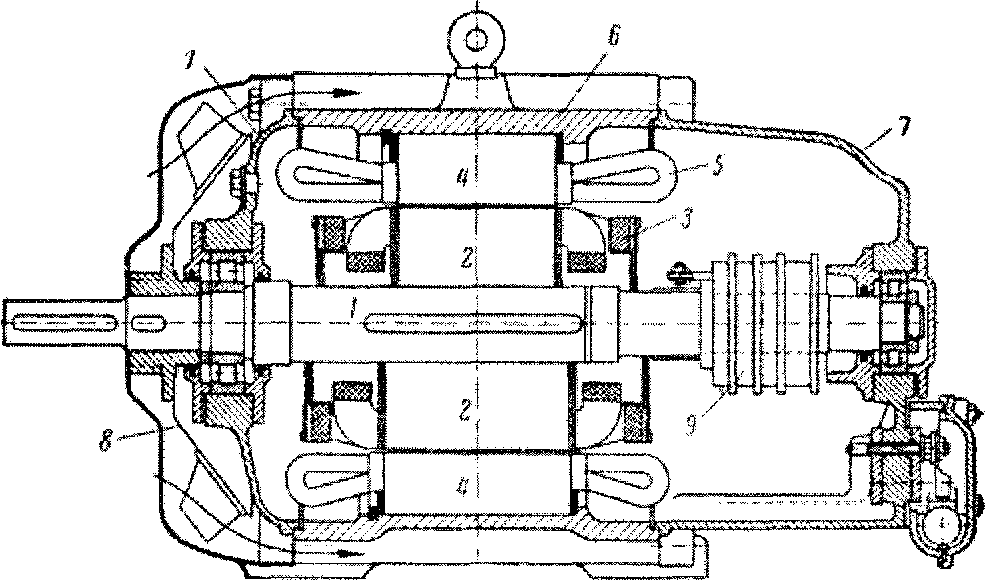 Изоляцией между листами ротора обычно служит пленка окисла. Активная сталь ротора является частью магнитной цепи двигателя.
Изоляцией между листами ротора обычно служит пленка окисла. Активная сталь ротора является частью магнитной цепи двигателя.
Фазный ротор асинхронного двигателя 1 — сердечник ротора; 2 — обмотка ротора; 3 — контактное кольцо
Стальной лист ротора
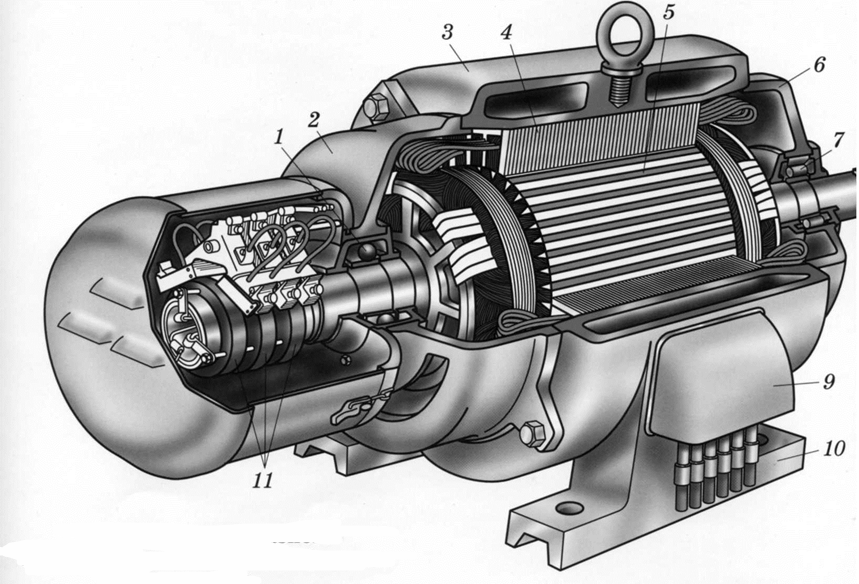
Продольный разрез асинхронного двигателя с фазным ротором 1 — вал; 2 — активная сталь ротора; 3 — обмотка статора; 4 — станина; 5 — сталь статора; 6 — подшипниковый щит; 7 — контактные кольца; 8 — щетки; 9 — выводы
Беличье колесо Трехфазный асинхронный короткозамкнутый двигатель
а б в
Роторы короткозамкнутые а — с обычной клеткой; б — с двойной клеткой; в — с глубокой клеткой
Трехфазный асинхронный двигатель с фазным ротором
Короткозамкнутый ротор двигателя с алюминиевой литой обмоткой
Обмотка может быть фазной, построенной по тому же принципу, что и обмотка статора. Делается это в том случае, когда в фазы обмотки включается добавочное сопротивление (реостат), необходимый при пуске или регулирования скорости двигателя.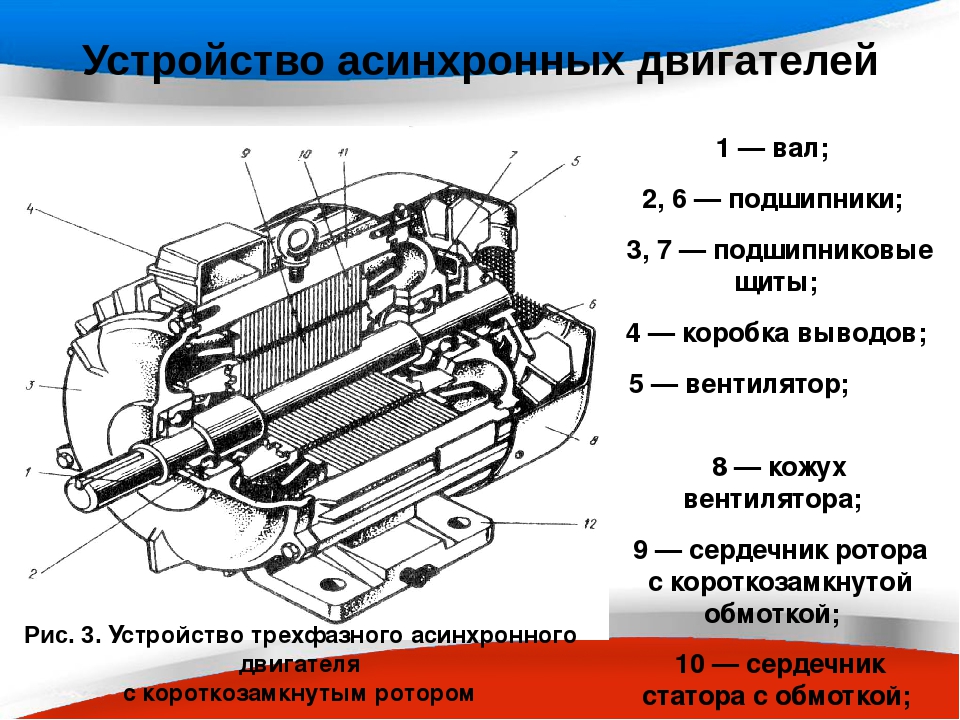 Фазный ротор показан на рис. Обмотка ротора 2 соединяется в звезду, а выводы подключаются к трем контактным кольцам 3, насаженным на вал ротора и изолированным от вала и друг от друга. Контактные кольца изготавливаются из меди, бронзы, редко из стали.
Фазный ротор показан на рис. Обмотка ротора 2 соединяется в звезду, а выводы подключаются к трем контактным кольцам 3, насаженным на вал ротора и изолированным от вала и друг от друга. Контактные кольца изготавливаются из меди, бронзы, редко из стали.
Продольный разрез двигателя с фазным ротором показан на рис.
Чаще изготовляются двигатели с короткозамкнутой обмоткой ротора. Если в пазы ротора уложены голые медные или алюминиевые стержни, концы которых замкнуты накоротко кольцами, то такая обмотка называется короткозамкнутой. Обмотка образует клетку, называемую беличьей; показана отдельно на рис. Короткозамкнутую обмотку ротора делают в трех модификациях: с нормальной клеткой, с двойной клеткой и с глубоким пазом. Для двигателей до 100 кВт чаще всего клетку получают путем отливки из алюминия, при этом одновременно отливаются торцевые кольца и лопасти вентилятора для охлаждения двигателя. Роторные обмотки также выполняют из меди и ее сплавов. В пазы прямоугольной или трапецеидальной формы забивают стержни, к стержням с обеих сторон припаивают твердым припоем замыкающие кольца.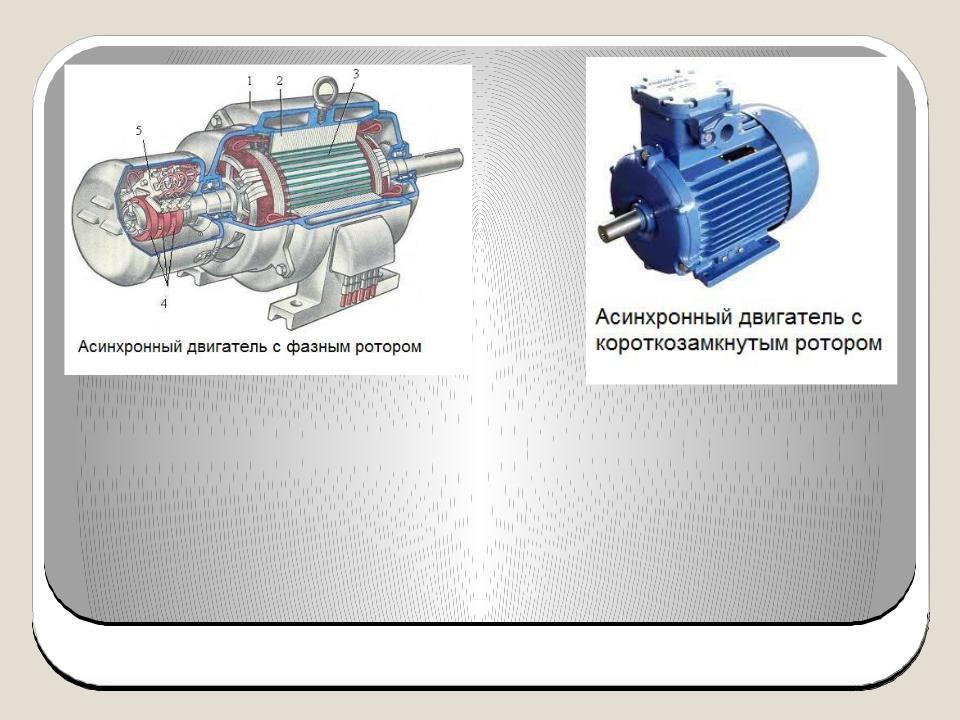
Вид двигателя с фазным ротором и с короткозамкнутым, имеющим внешний обдув для охлаждения, показан на рис.
Асинхронный двигатель: знакомство с оборудованием
Жизнь в наше время невозможно представить без электрических двигателей. Широкое применение нашли эти агрегаты не только в промышленности, но и в быту — ведь электроприборы, которые призваны облегчить жизнь человека, в 95% случаев не обходятся без применения электродвигателей. И если даже сильно постараться, то представить себе жизнь без них вряд ли удастся.
Хотя первый опытный асинхронный двигатель был произведен Николой Тесла еще в конце 1880-х годов, в то время распространения он так и не получил ввиду слишком больших потерь электроэнергии при его работе. Да и показатели того двигателя в момент запуска были очень низкими.
Что же представляет собой асинхронный двигатель? По своей сути это устройство, преобразующее электрический ток в механическую энергию посредством магнитных полей, которые вращают ротор внутри статора. При этом частота вращения магнитных полей, которые создаются на обмотках статора, не равна тому же параметру сердечника. Именно поэтому они названы «двигатели асинхронные», т.е. «неодновременного вращения».
При этом частота вращения магнитных полей, которые создаются на обмотках статора, не равна тому же параметру сердечника. Именно поэтому они названы «двигатели асинхронные», т.е. «неодновременного вращения».
Что же касается видов этих агрегатов, то их различают несколько, но об этом чуть позже. Для начала имеет смысл разобрать достоинства и недостатки подобных двигателей, т.е. самого распространенного из них вида — устройства с короткозамкнутым ротором, обозначаемым как АДКЗ (асинхронный двигатель короткозамкнутого типа).
Асинхронный двигатель с короткозамкнутым ротором в разбореДостоинства и недостатки
В первую очередь асинхронные электродвигатели достаточно просты в части устройства и изготовления, что не может не влиять на их стоимость, ведь в частности из-за невысокой цены этот мотор завоевал большую популярность среди покупателей. Так же важную роль играет и надежность АД, и их экономичность в области эксплуатационных затрат — они практически не требуют обслуживания. Конечно, это не говорит о том, что асинхронный электродвигатель можно установить и совсем забыть о периодических ревизиях, но все же их требуется достаточно мало, схема его достаточно неприхотлива.
Конечно, это не говорит о том, что асинхронный электродвигатель можно установить и совсем забыть о периодических ревизиях, но все же их требуется достаточно мало, схема его достаточно неприхотлива.
Ну и конечно не стоит забывать о том, что для включения в сеть, т.е. для запуска и эксплуатации, не требуется каких-либо дополнительных устройств, таких как разнообразные преобразователи и т.п.
Но, при такой простоте и невысокой стоимости, естественно, не обошлось и без недостатков, которые нельзя назвать мелкими. Из них можно выделить следующие:
сравнительно небольшой пусковой момент;
значительные пусковые токи, а значит и энергозатраты при включении;
довольно низкий коэффициент полезного действия;
необходимую точность скорости довольно тяжело отрегулировать;
у асинхронного двигателя, имеющего короткозамкнутый привод (при включении в трехфазную сеть 50 Гц), скорость вращения не превышает 3000 об/мин;
большая зависимость крутящего момента от напряжения сети.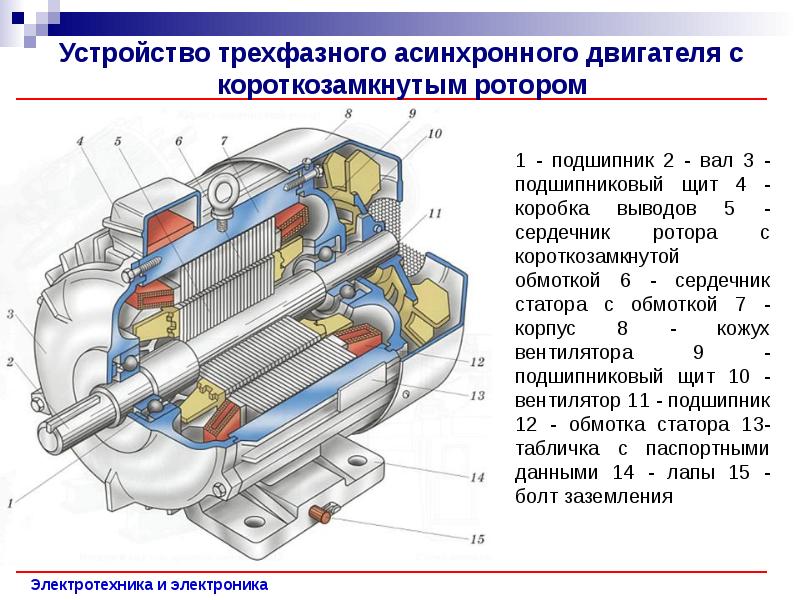 К примеру, при понижении входного тока в 2 раза, скорость крутящего момента может упасть в 4 раза.
К примеру, при понижении входного тока в 2 раза, скорость крутящего момента может упасть в 4 раза.
Но все вышеперечисленное относится только к моторам, имеющим строение на основе короткозамкнутого ротора, производство двигателей которыми не ограничивается. Попробуем рассмотреть более подробно асинхронные электродвигатели с короткозамкнутым ротором, а также другие типы подобных агрегатов, которые представлены на прилавках магазинов электротехники.
Короткозамкнутый роторАДКЗ
Ротор асинхронного двигателя, обмотка которого короткозамкнута, так же называют и «беличьим колесом» по причине того, что она похожа на цилиндрическую сетку, прутья которой замыкаются посредством двух колец с одного и другого торца.
Структура, как ротора, так и асинхронного статора является зубчатой. В АД небольших мощностей обмотка изготавливается простейшим способом — алюминиевый сплав в расплавленном состоянии заливается в углубления на роторе. Тем же способом, одновременно, заливаются и оба кольца, замыкающие «колесо», а также торцевой синхронизатор, осуществляющий вентиляционное охлаждение агрегата, т. е. с его помощью обеспечивается нормальная рабочая температура. При необходимости изготовления более мощных двигателей вместо алюминиевого сплава используют медь.
е. с его помощью обеспечивается нормальная рабочая температура. При необходимости изготовления более мощных двигателей вместо алюминиевого сплава используют медь.
Асинхронные двигатели переменного тока с т.н. «двойной беличьей клеткой» для модернизации пусковой характеристики в настоящее время практически ушли в прошлое. Сейчас применяется схема, при которой пазы для проводников делаются глубже, причем внутренняя часть каждого из них имеет большее сечение, нежели внешняя. В результате подобной технологии изготовления ротора увеличивается пусковой момент и уменьшается ток, за счет более сильного активного сопротивления обмотки.
Области применения АДКЗ довольно обширны. К тому же, в последние годы все больше начали применяться частотные преобразователи, при помощи которых стало возможно плавное наращивание скорости, вследствие чего достигается больший пусковой момент и снижение тока, тем самым увеличивается коэффициент полезного действия асинхронного двигателя с короткозамкнутым ротором.
Так же очень интересна схема исполнения АДКЗ, в которой используется возможность изменения числа пар обмоток статора. Принцип работы асинхронного двигателя подразумевает, что подобным действием возможно изменение скорости его вращения.
На сегодняшний день подобные конструкции двигателей, несмотря на их недостатки, являются наиболее распространенными и востребованными. А вот остальные виды асинхронных двигателей уже более узконаправленны, и их применение не так значительно.
Фазный роторМассивный ротор в АД
Короткозамкнутый двигатель, принцип работы которого заключается в отсутствии обмотки как таковой. Ротор здесь состоит целиком из стали и одновременно является и проводником, и магнитопроводом. Вихревые токи, инициирующиеся вращающимся магнитным полем, взаимодействуют с потоками, создаваемыми статором, посредством чего и создается крутящий момент. Попробуем разобрать, какие же плюсы и минусы имеются у этих асинхронных двигателей.
Из преимуществ можно отметить низкую стоимость и простоту изготовления, довольно высокую механическую прочность (что очень важно для агрегатов с высокими скоростями вращения), а также наличие высокого пускового момента. Но при этом есть очень существенный недостаток —довольно большие энергопотери ротора при работе.
Но при этом есть очень существенный недостаток —довольно большие энергопотери ротора при работе.
Интересны также и некоторые особенности, которые имеют подобные асинхронные двигатели, — это пологая механическая характеристика и сильный нагрев агрегата, независимо от нагрузки, что является довольно существенным минусом по причине резкого падения коэффициента полезного действия. Получается, что основная энергия тратится на нагрев, т.е. выработку тепла.
Конечно, разрабатываются и улучшения для подобных типов двигателей, такие как омеднение роторов или добавление с торцов колец из меди, но помогает подобная модернизация незначительно.
Также сюда можно отнести и пустотелые стальные роторы, которые изготавливаются для работы с меньшим нагревом.
Фазный ротор в асинхронном двигателе
Действия магнитных полей в статореПодобное устройство асинхронного электродвигателя является более сложным, т.к. их роторы имеют трехфазную обмотку, которая соединяется в «звезду». Подобные двигатели обладают возможностью плавной регулировки скорости, причем диапазон вращения достаточно широк. Внешняя цепь соединяется с вращающимся валом посредством специальных щеток, которые могут быть графитовыми или медно-графитовыми. Обмотка ротора выполняется из меди.
Внешняя цепь соединяется с вращающимся валом посредством специальных щеток, которые могут быть графитовыми или медно-графитовыми. Обмотка ротора выполняется из меди.
Подобный асинхронный электродвигатель подходит для использования с инверторами, реостатами для изменения скорости вращения и даже может работать в качестве синхронного двигателя при подаче на него прямого напряжения.
Возможности, которые имеют асинхронные двигатели с фазным ротором, довольно широки, но сложность при их изготовлении, а также довольно высокая стоимость не дали подобным устройствам более широкого распространения.
Двигатель Шраге-Рихтера
Этот тип является трехфазным коллекторным асинхронным двигателем, при этом питание на него поступает через ротор. Таким образом, подобные агрегаты называют также обращенными.
Асинхронный электродвигатель, у которого подобная схема, уже стал историей и практического применения на сегодняшний день не имеет.
Скорость вращения в них регулировалась специальным штурвалом, который перемещал щетки, в результате чего изменялась индуктивность. Подобная система довольно экономично изменяет скорость вращения ротора, но более подробно на таких агрегатах останавливаться не стоит.
Подобная система довольно экономично изменяет скорость вращения ротора, но более подробно на таких агрегатах останавливаться не стоит.
Куда интереснее понять устройство асинхронного двигателя и принцип его работы.
Устройство и принцип действия
Как уже говорилось ранее, конструкция асинхронного двигателя достаточно проста — это ротор, или вращающаяся часть, и статор — неподвижная обмотка, внутри которой и создаются электромагнитные импульсы. Снаружи статор может иметь цельную либо сваренную оболочку из чугуна, алюминия, или его сплава, которая работает как радиатор охлаждения в процессе эксплуатации.
Асинхронный двигатель в разрезеПринцип действия АД таков: напряжение, поступая на обмотки, создает магнитное поле. И т.к. угол сдвига фаз в асинхронном двигателе составляет 120 градусов, то поле, вырабатываемое ими, является вращающимся. Оно-то и создает крутящий момент, проходя через обмотки ротора. По сути, смысл работы тот же, что и у синхронных агрегатов, но тут не требуется создания на статоре дополнительного поля в виде магнитов.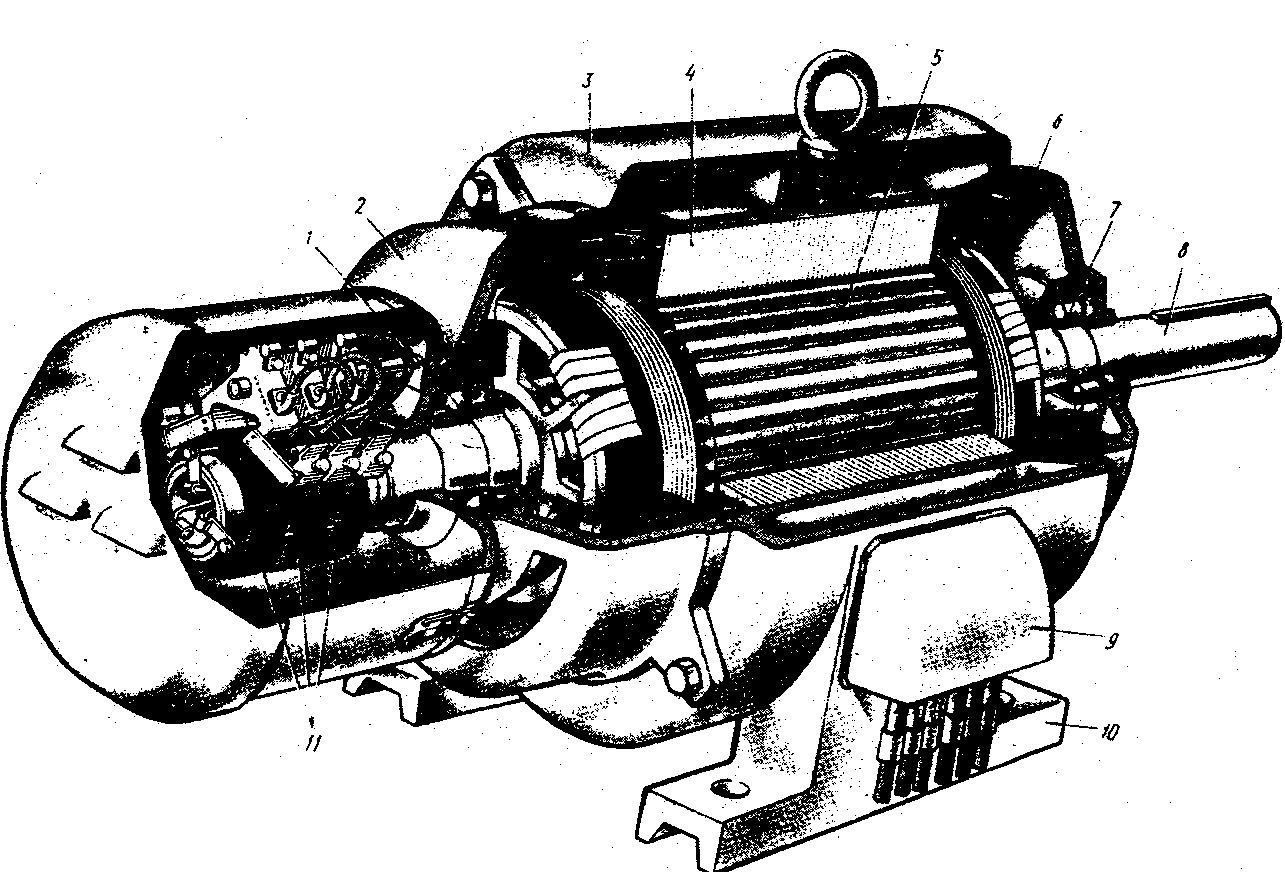
Подключение асинхронных двигателей
Разобравшись, каков же принцип действия АД, можно переходить к подключению.
Существует две разновидности подключения асинхронного двигателя к сети 380 В, хотя от этого принцип его действия не меняется. Это может быть «звезда» либо «треугольник». Сейчас имеет смысл разобрать каждый из этих видов подробнее.
Подключение «звездой» происходит следующим образом: напряжение по фазным проводам подается к началу, а каждая обмотка асинхронного двигателя концом соединена с началом следующей таким образом, что создается некое подобие треугольника.
Нулевой провод при подключении трехфазных двигателей не требуется, им вполне хватает защитного заземления корпуса.
Подключение «звездой» немного отличается от предыдущего. Здесь концы всех обмоток соединены вместе, а напряжение подается также на начало. Интересно, что при подобном подключении в месте соединения всех трех обмоток по причине разности потенциалов возникает так называемый «технический ноль».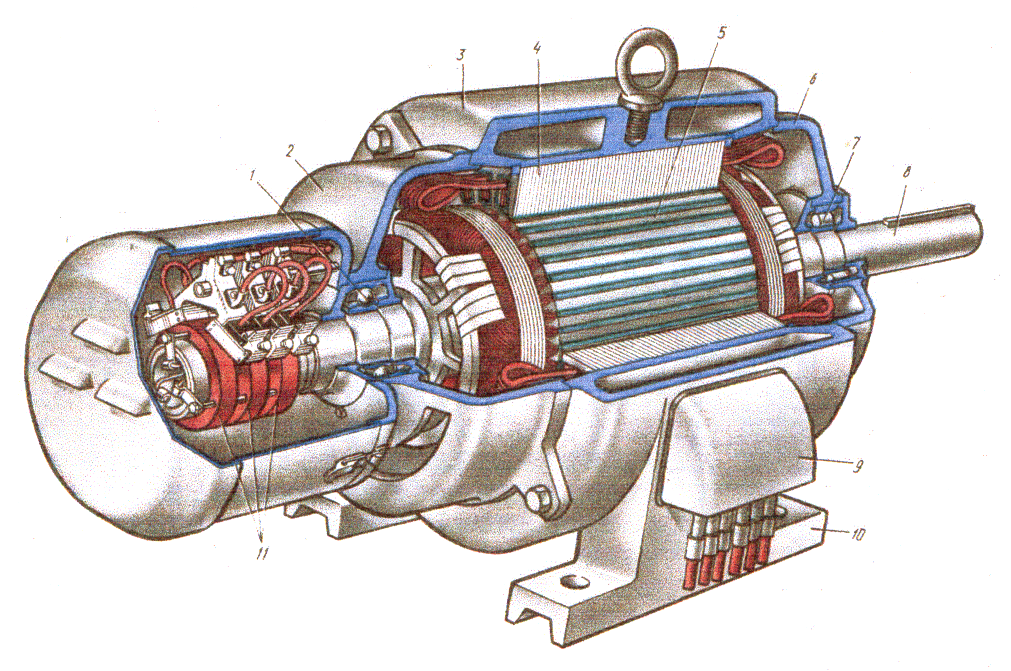 Подобное физическое явление можно наблюдать и в жилах высоковольтного провода, где ноль находится точно по центру, в то время как по проводнику течет ток высокого напряжения.
Подобное физическое явление можно наблюдать и в жилах высоковольтного провода, где ноль находится точно по центру, в то время как по проводнику течет ток высокого напряжения.
Есть ли альтернатива
Уже не секрет, что устройство трехфазного асинхронного двигателя предполагает затраты большого количества электроэнергии на вырабатывание тепла, а значит и коэффициент его полезного действия достаточно низок. Но на сегодняшний день альтернативы подобным агрегатам нет, а потому продолжается их использование, как в промышленности, так и в быту.
Конечно, с появлением инверторов, КПД их значительно возрос. Сейчас двигатели инверторного типа прекрасно работают в стиральных машинах, холодильниках и прочей технике, позволяя получить максимум результата при меньшем расходе электроэнергии.
Возможно, в будущем и появится что-то новое, что сможет заменить асинхронные двигатели, но пока это остается единственным в своем роде агрегатом, без которого различные производства невозможны.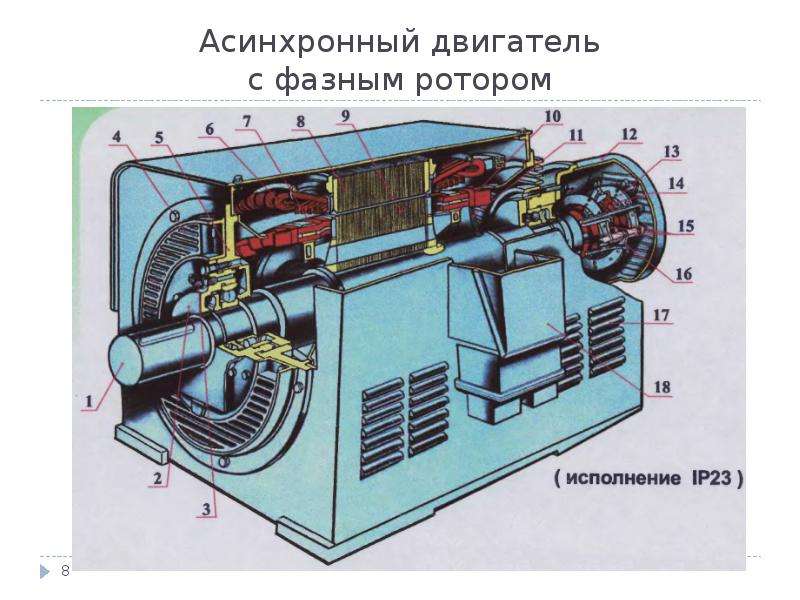 Именно этим и объясняется его востребованность и распространенность.
Именно этим и объясняется его востребованность и распространенность.
Каталог асинхронных электродвигателей.
Если вы не знаете как подобрать подобрать или заменить старый электродвигатель по типу мощности или каким либо другим параметрам звоните нам или оставляйте заявку на сайте, в ближайшее время квалифицированные специалисты с вами свяжутся. Наши опытные специалисты помогут вам в подборе подходящего электродвигателя ( по типу мощности, режиму работы, защиты, климатических условий и других внешних факторов) и ответят на любые вопросы. У нас большой ассортимент и большая наработанная база, с помощью которой вы не останетесь без двигателя.
VFD-технология в системах вентиляции и кондиционирования
В 1888 году Никола Тесла получил патент на индукционный двигатель переменного тока. По сравнению с появившимися ранее двигателями постоянного тока изобретение оказалось более надежным и эффективным. Однако для управления скоростью вращения такого требуется изменение величины магнитного потока либо изменение числа полюсов в двигателе. И даже спустя десятилетия, после того как индукционный двигатель стал широко применяться, изменение частоты питающего тока для управления скоростью вращения оставалось крайне непростой задачей, а физическая конструкция двигателя не позволяла производителям создавать устройства более чем с двумя скоростями.
И даже спустя десятилетия, после того как индукционный двигатель стал широко применяться, изменение частоты питающего тока для управления скоростью вращения оставалось крайне непростой задачей, а физическая конструкция двигателя не позволяла производителям создавать устройства более чем с двумя скоростями.
Появление VFD
Долгое время практически единственным решением для случаев, где требовались точный контроль скорости вращения и высокая выходная мощность, оставались двигатели постоянного тока. Скорость и крутящий момент такого двигателя изменялись при помощи реостата, установленного в цепь постоянного тока.
К началу 1980-х годов повышение надежности двигателей переменного тока и снижение их стоимости позволило устройствам начать конкурировать с традиционными двигателями постоянного тока. Для точного контроля над скоростью вращения синхронных и индукционных (асинхронных) двигателей была разработана технология частотно-регулируемых приводов (VFD).
Рис.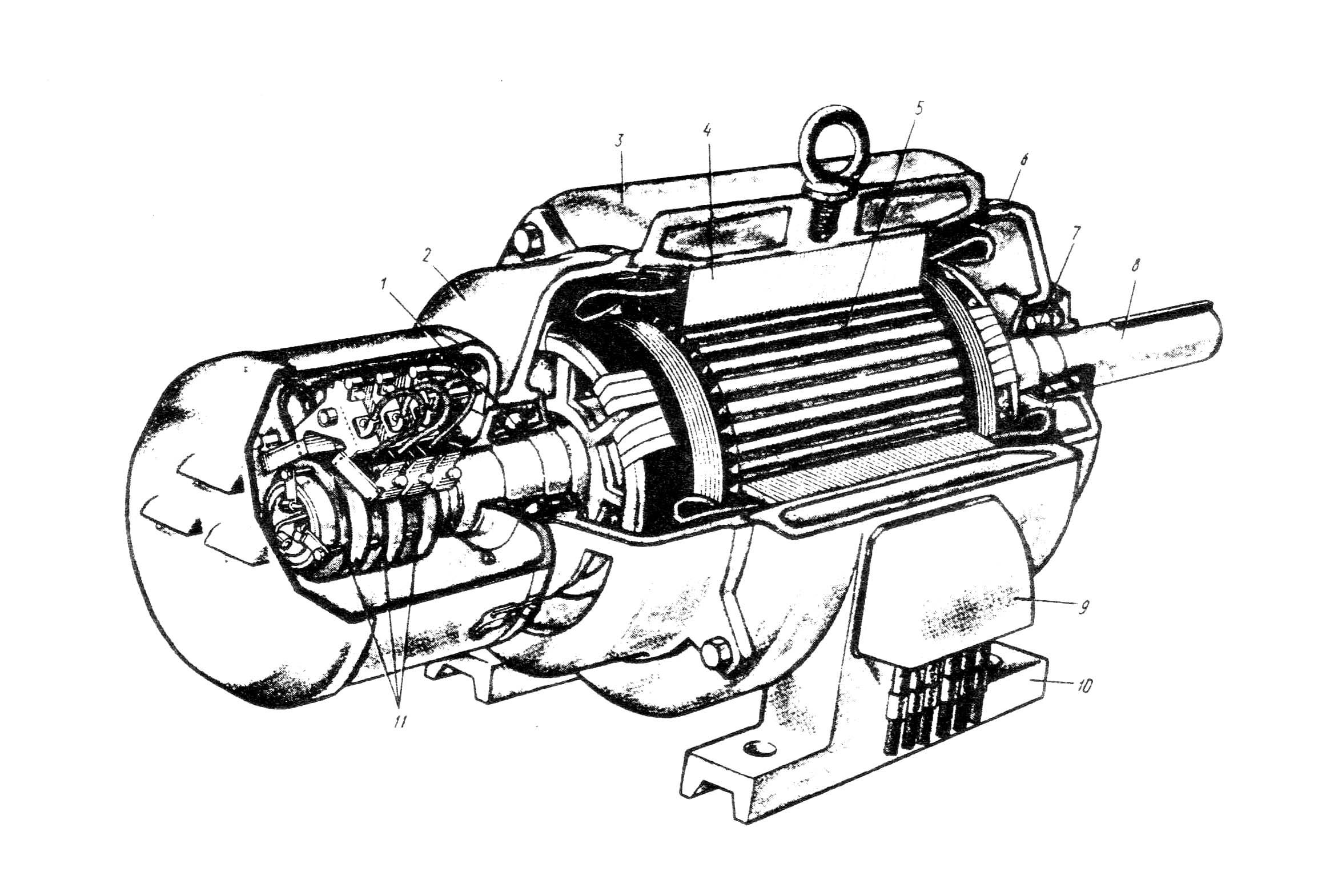 1. Индукционный (асинхронный) двигатель в разрезе 1. Индукционный (асинхронный) двигатель в разрезе |
Использование VFD позволяет изменять скорость вращения в диапазоне от нуля до максимума (оборотов в минуту) при максимальном крутящем моменте, также существует возможность превысить максимально допустимую скорость вращения при снижении крутящего момента.
Управление частотой выходного тока в VFD происходит за счет преобразования входного переменного тока в постоянный, далее выполняется широтно-импульсная модуляция по напряжению для получения переменного тока с необходимыми характеристиками.
Типы частотно-регулируемых приводов
Существует три основных типа частотно-регулируемых приводов.
Приводы на основе инвертора тока (CSI) давно и успешно применяются в области обработки сигналов и в промышленном силовом оборудовании. CSI VFD являются единственным типом приводов, позволяющим выполнять рекуперацию мощности. Другими словами, приводы данного класса могут направлять вырабатываемую двигателем мощность обратно в цепь источника питания. CSI VFD дают очень качественную характеристику выходного тока, однако для работы им требуются большие и дорогие катушки индуктивности.
CSI VFD дают очень качественную характеристику выходного тока, однако для работы им требуются большие и дорогие катушки индуктивности.
Приводы на базе инвертора напряжения (VSI) обладают низким коэффициентом мощности, могут вызывать пульсацию двигателя при частоте ниже 6 Гц и не позволяют осуществлять рекуперацию. Частотно-регулируемые приводы типа CSI и VSI не получили широкого распространения.
Приводы с широтно-импульсной модуляцией (PWM) являются наиболее часто используемым типом приводов по причине отличного показателя входного коэффициента мощности, отсутствия пульсации двигателя, высокой эффективности работы и более низкой стоимости в сравнении с аналогами.
Привод типа PWM использует набор импульсов напряжения различной ширины для моделирования синусоидальной волны. Получение выходной волны достигается за счет пропуска треугольной волны и синусоидальной волны через компаратор, на выходе которого образуется импульс напряжения, в случае если величина синусоиды превосходит величину треугольной волны.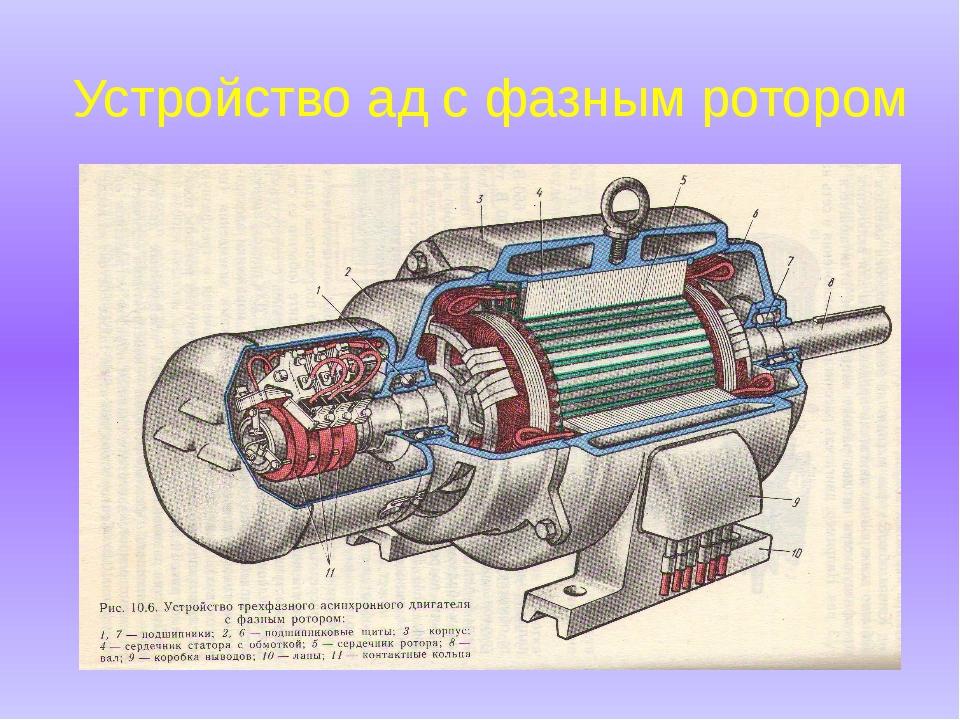 Для получения импульсов напряжения чаще всего применяется биполярный транзистор с изолированным затвором.
Для получения импульсов напряжения чаще всего применяется биполярный транзистор с изолированным затвором.
ПРИМЕРЫ ВНЕДРЕНИЯ VFDРяд компаний уже внедрили в принадлежащих им ЦОД вентиляторы с переменной скоростью вращения, что позволяет экономить сотни тысяч долларов ежегодно. BNY MellonКомпания BNY Mellon (США) работает в сфере инвестиционного менеджмента. В принадлежащем компании дата-центре площадью 6500 квадратных метров, расположенном в северной части штата Пенсильвания, были установлены вентиляторы с переменной скоростью вращения. В результате удалось добиться снижения скорости работы вентиляторов на 25 %, что привело к сокращению энергопотребления вентиляторными системами на 58 %. TargetДва принадлежащих компании Target (США) дата-центра, Brooklyn Park и Elk River, имеющие общую мощность 3,4 МВт, были оснащены вентиляторами с частотно-регулируемыми приводами (VFD). До установки VFD система кондиционирования воздуха и вытяжные вентиляторы вращались с постоянной скоростью каждый день на протяжении всего года. Установка VFD позволила снизить скорость вращения вентиляторов, что привело к существенному сокращению энергопотребления. В некоторых случаях скорость удалось снизить на 78 %, что привело к сокращению энергопотребления оборудования на 99 %. Мощность двигателей, устанавливаемых в кондиционерах и вентиляционных модулях, находится в диапазоне от 7,5 до 15 л. с. Мощность вытяжных вентиляторов 1,5 л. с. EBAYКомпания EBAY (США) установила VSD в дата-центре, расположенном в г. Фениксе и имеющем общую площадь 13 000 квадратных метров. На объекте были установлены 83 модуля CRAH с водяным охлаждением, каждый из которых оснащен вентиляторами с постоянной скоростью вращения. Подача охлажденной воды в каждом модуле регулировалась датчиком температуры отработанного в ЦОД воздуха, установленным в вытяжной камере. В рамках модернизации были установлены новые высокоэффективные двигатели (эффективность 95 %), и каждый модуль CRAH был оснащен вентиляторами с переменной скоростью вращения. RagingWireВ принадлежащем компании RagingWire (США) дата-центре CA1 общей мощностью 20 МВт были установлены вентиляторы с частотно-регулируемым приводом. Каждый насос системы охлаждения, насос подачи охлажденной воды и модуль CRAH был оснащен VFD. В результате среднее сокращение скорости вращения вентиляторов составило 42 %, что соответствует ежегодной экономии в 473 000 долларов. Оригинальная система управления модулями кондиционирования обладала одним недостатком: если один из модулей отключался, требовалось подключение другого модуля. В случае использования VFD отказ одного из модулей приводит к повышению скорости вращения вентиляторов в других модулях, что также способствует эффективности работы системы. Использование VFD в РоссииОдин из примеров успешного внедрения данной технологии — дата-центр КОМКОР, расположенный на Варшавском шоссе в Москве. Энергопотребление ЦОД составляет 3,5 МВт. Установленные на насосной станции моторы оснащены частотно-регулируемым приводом для плавного пуска/переключения скорости работы, что положительно сказывается на энергоэффективности и снижает степень износа оборудования. Вентиляторы VFD расположены на внешней ферме, что позволяет без проблем работать даже при сильном ветре. |

 Наборы для модернизации CRAH поставлялись непосредственно производителем. Установка VSD позволила сократить энергопотребление воздушных кондиционеров практически в 4 раза, что соответствует ежегодной экономии в 283 596 долларов США при стоимости одного кВт∙ч электричества 6,5 цента.
Наборы для модернизации CRAH поставлялись непосредственно производителем. Установка VSD позволила сократить энергопотребление воздушных кондиционеров практически в 4 раза, что соответствует ежегодной экономии в 283 596 долларов США при стоимости одного кВт∙ч электричества 6,5 цента.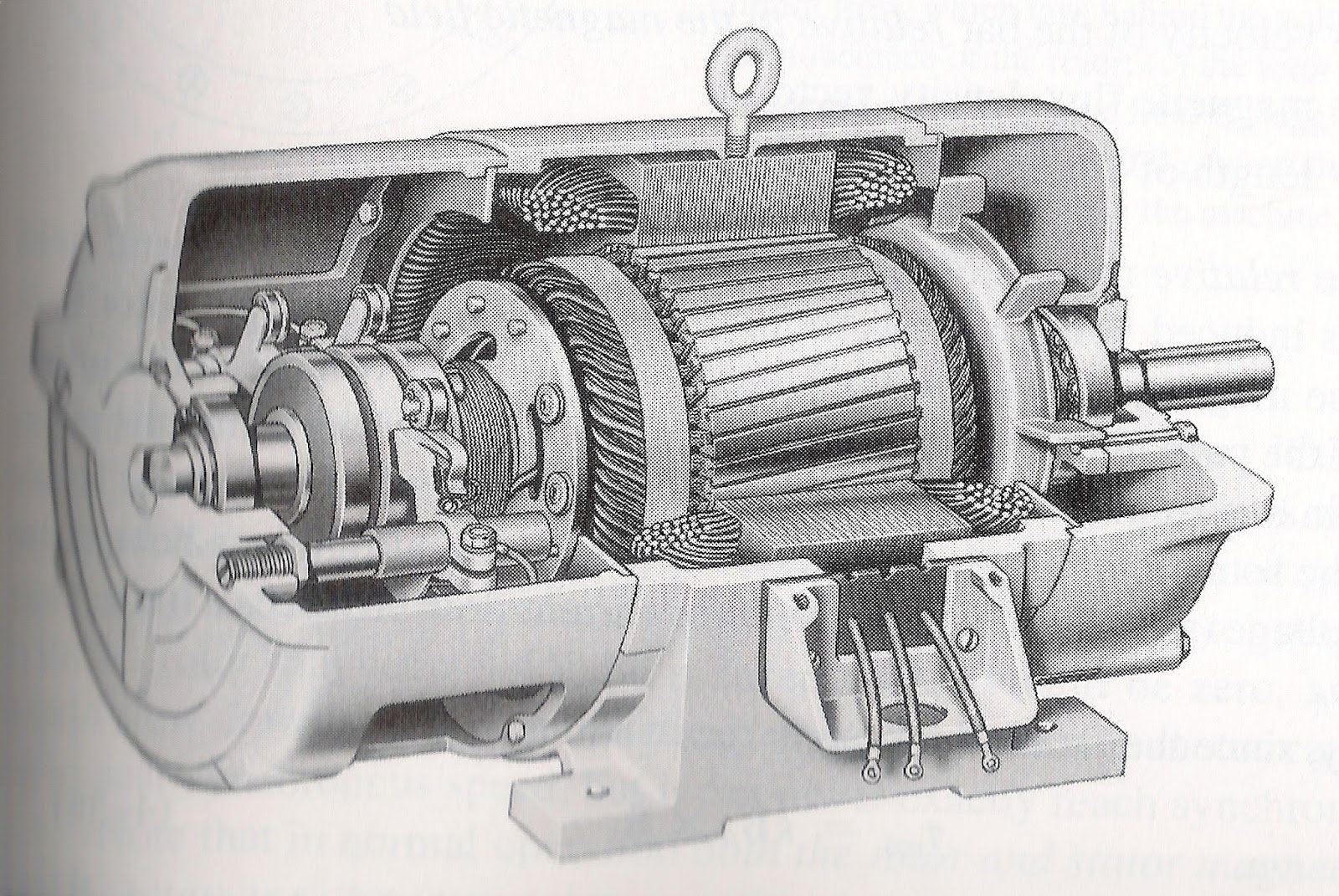
Развитие технологии VFD
Частотно-регулируемые приводы первого поколения имели ограниченную область применения. В настоящее время VFD могут использоваться практически в любой системе вентиляции и кондиционирования воздуха, устанавливаемой в коммерческих и муниципальных зданиях. Современные двигатели могут работать при более высоком уровне напряжения по сравнению с их ранними аналогами, что позволяет серийно выпускать модели мощностью до 500 л. с.
с.
Устройства первых поколений также отличались низким коэффициентом мощности, что могло негативно сказываться на качестве распределения электроэнергии и приводить к штрафным санкциям со стороны энергетических компаний. Коэффициент мощности современных системы VFD близок к постоянному по всему диапазону скоростей.
Еще одной характерной проблемой оборудования, которая устранена в новых моделях VFD, являлся шум. По мере того как выходная частота привода снижалась в ответ на изменение нагрузки, возбуждаемая в двигателе вибрация приводила к возникновению шума, который распространялся от двигателя по всему рабочему помещению. Современные частотно-регулируемые приводы работают на повышенных частотах, так что возникающий во время работы шум находится выше воспринимаемого человеком звукового диапазона.
Частотно-регулируемые приводы и системы кондиционирования и вентиляции
Традиционные системы вентиляции и кондиционирования, как правило, используют вентиляторы и насосы, работающие с постоянной скоростью.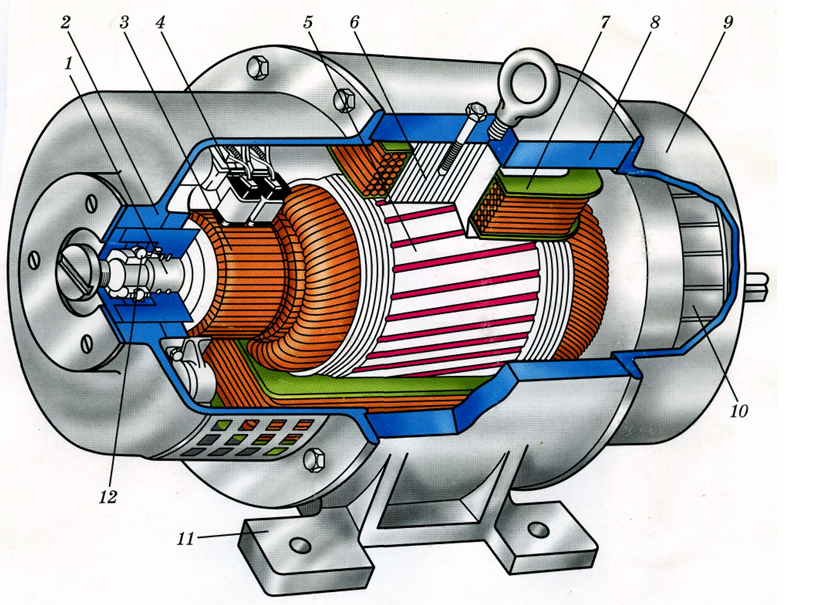 Однако рабочая нагрузка на объекте не является постоянной.
Однако рабочая нагрузка на объекте не является постоянной.
В традиционной системе с целью снижения расхода уровня воды или воздуха может быть применен дроссельный механизм. При этом двигатель продолжает работать на полной скорости, используя практически неизменный объем энергии вне зависимости от уровня нагрузки на систему кондиционирования. Дроссельный механизм позволяет достаточно точно контролировать подачу жидкости/газа, но он является не слишком эффективным. VFD представляют собой эффективную и экономичную альтернативу дроссельному механизму.
Эффективность работы VFD обеспечивается следующими факторами:
- Работа при неполной загрузке системы. Системы вентиляции разрабатываются с учетом пиковой нагрузки. Пиковые нагрузки, как правило, наблюдаются в течение 1–5 % от всего времени работы. Это означает, что используемые в насосах и вентиляторах двигатели расходуют лишнюю энергию в течение 95–99 % рабочих часов.
- Завышение мощности системы.
 Разработка систем вентиляции с учетом пиковой нагрузки приводит к завышенному энергопотреблению при работе в штатном режиме. Более того, система может разрабатываться с учетом непредвиденных и внештатных нагрузок, а также потенциальных нагрузок, которые могут возникнуть в связи с изменениями в механизме использования внутреннего пространства здания.
Разработка систем вентиляции с учетом пиковой нагрузки приводит к завышенному энергопотреблению при работе в штатном режиме. Более того, система может разрабатываться с учетом непредвиденных и внештатных нагрузок, а также потенциальных нагрузок, которые могут возникнуть в связи с изменениями в механизме использования внутреннего пространства здания. - Энергопотребление двигателя является функцией скорости. Наиболее часто в системах вентиляции и кондиционирования применяется индукционный двигатель. Для индукционного двигателя характерна кубическая зависимость потребляемой мощности от скорости вращения привода. Это означает что если снизить скорость работы двигателя на 25 %, его энергопотребление упадет почти на 60 %. В случае 50 %-ного снижения скорости экономия электроэнергии достигает 90 %.
 Разработка систем вентиляции с учетом пиковой нагрузки приводит к завышенному энергопотреблению при работе в штатном режиме. Более того, система может разрабатываться с учетом непредвиденных и внештатных нагрузок, а также потенциальных нагрузок, которые могут возникнуть в связи с изменениями в механизме использования внутреннего пространства здания.
Разработка систем вентиляции с учетом пиковой нагрузки приводит к завышенному энергопотреблению при работе в штатном режиме. Более того, система может разрабатываться с учетом непредвиденных и внештатных нагрузок, а также потенциальных нагрузок, которые могут возникнуть в связи с изменениями в механизме использования внутреннего пространства здания.Использование VFD в системах вентиляции и кондиционирования позволяет устранить влияние первых двух факторов, а третий фактор способствует росту энергоэффективности.
Двигатели, работающие по технологии VFD, преобразуют ток с частотой 60 Гц в постоянный, а затем снова в переменный, напряжение и частота которого меняется в зависимости от уровня нагрузки на систему. По мере снижения нагрузки VFD-контроллер уменьшает скорость вращения привода, что позволяет поддерживать необходимый уровень охлаждения при пониженном энергопотреблении.
Преимущества VFD
| Рис. 2. Частотно-регулируемый привод из линейки P-series от компании Cerus Industrial |
Наиболее важное преимущество VFD — экономия электроэнергии. За счет соответствия текущей потребляемой мощности системы реальной загрузке на протяжении всего года достигается значительная экономия энергии.
Еще одним преимуществом частотно-регулируемых приводов является уменьшение степени износа оборудования. В момент запуска через индукционный двигатель проходит значительно более высокий ток в сравнении со штатным режимом функционирования. Величина пускового тока может в 3–10 раз превышать величину тока при полной загрузке системы, что приводит к нагреву оборудования и повышению нагрузки на обмотку и другие компоненты двигателя. Если включение и отключение двигателя происходят достаточно часто, может наблюдаться ранний выход оборудования из строя.
Величина пускового тока может в 3–10 раз превышать величину тока при полной загрузке системы, что приводит к нагреву оборудования и повышению нагрузки на обмотку и другие компоненты двигателя. Если включение и отключение двигателя происходят достаточно часто, может наблюдаться ранний выход оборудования из строя.
В противоположность этому, когда происходит запуск двигателя, подключенного к VFD, частотно-регулируемый привод прикладывает к двигателю низкое напряжение с низкой частотой. Обе величины постепенно повышаются до нормального рабочего состояния, что позволяет продлить жизнь двигателю.
Частотно-регулируемый привод также позволяет более точно управлять работой систем кондиционирования. К примеру, в высотных зданиях применяются специальные насосы для поддержания необходимого уровня давления воды по всем этажам. Традиционные механизмы управления могут поддерживать уровень давления в рамках определенного диапазона, однако VFD-система позволяет точнее контролировать поток воды в более широких пределах, что приводит к снижению энергопотребления и уменьшению степени износа насосного оборудования.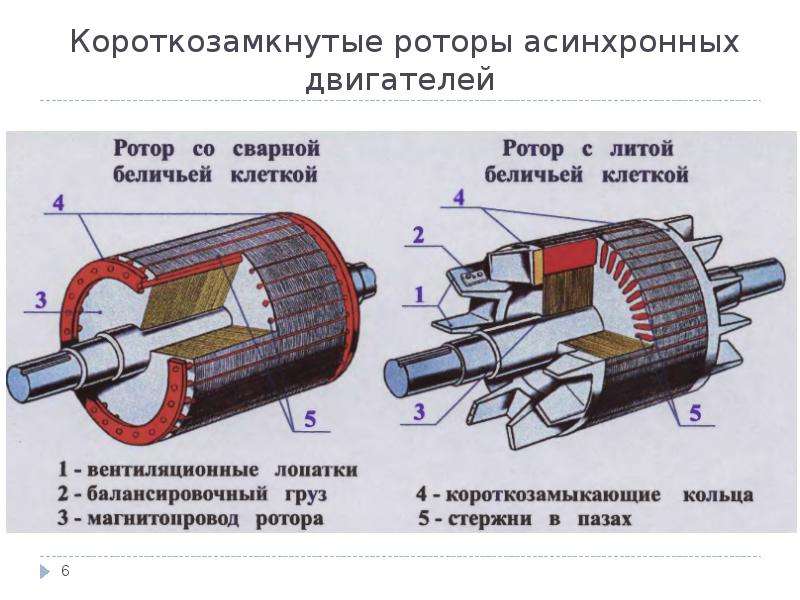
Варианты использования VFD-технологии в климатических системах
Частотно-регулируемый привод (VFD) является одним из наиболее эффективных инструментов для управления энергопотреблением, когда-либо применявшихся в системах вентиляции и кондиционирования воздуха.
В течение более чем двадцати лет VFD успешно устанавливаются на вентиляторы и насосы, используемые в условиях переменной рабочей нагрузки. Экономия энергии при использовании VFD составляет от 35 до 50 % в сравнении с традиционными двигателями с постоянной скоростью вращения, что позволяет окупить затраты на установку оборудования за период от 6 месяцев до двух лет.
Наиболее часто используемым типом двигателя в системах вентиляции и кондиционирования является трехфазный индукционный двигатель. Впрочем, в некоторых ситуациях может применяться однофазный индукционный двигатель. Оба типа двигателей могут быть оснащены частотно-регулируемым приводом.
VFD-контроллеры имеют широкий спектр применимости, однако наибольших преимуществ можно добиться при использовании в условиях, требующих переменной скорости вращения двигателя.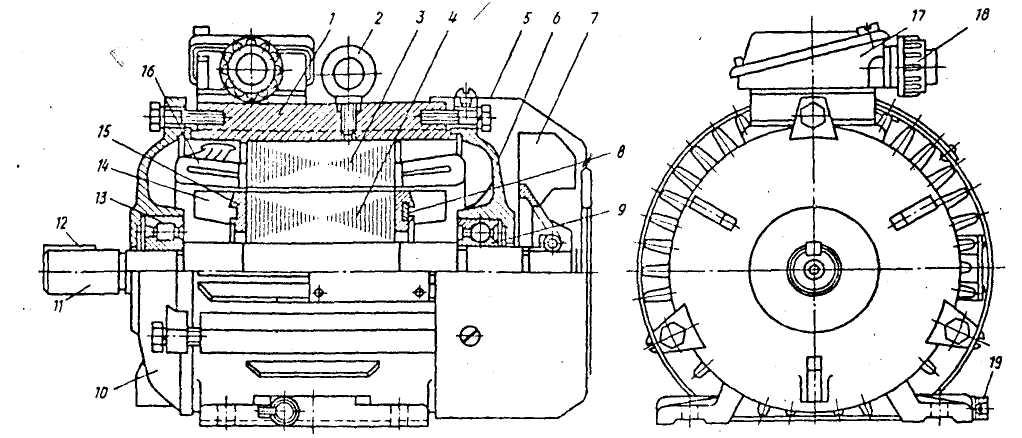 К примеру, скорость течения жидкости, регулируемая насосами, используемыми в системах водоснабжения, может быть адаптирована к существующему в здании уровню нагрузки за счет применения VFD для изменения скорости течения жидкости. Аналогичным образом в системах, требующих поддержания постоянного уровня давления вне зависимости от скорости течения жидкости (к примеру, системы горячего и холодного водоснабжения), может применяться VFD с контролем по реперной точке.
К примеру, скорость течения жидкости, регулируемая насосами, используемыми в системах водоснабжения, может быть адаптирована к существующему в здании уровню нагрузки за счет применения VFD для изменения скорости течения жидкости. Аналогичным образом в системах, требующих поддержания постоянного уровня давления вне зависимости от скорости течения жидкости (к примеру, системы горячего и холодного водоснабжения), может применяться VFD с контролем по реперной точке.
Большая часть коммерческих систем кондиционирования и вентиляции использует для распределения воздуха регулируемые вентиляционные системы. Эти системы, как правило, контролируются механизмом регулируемых лопаток входного направляющего аппарата, устанавливаемым в вентиляционных системах и в воздушных камерах переменного объема. По мере того как нагрузка на систему снижается, воздушные камеры переменного объема закрываются, что приводит к росту статического давления в системе. Контроллер вентилятора замечает изменения и закрывает входные лопатки.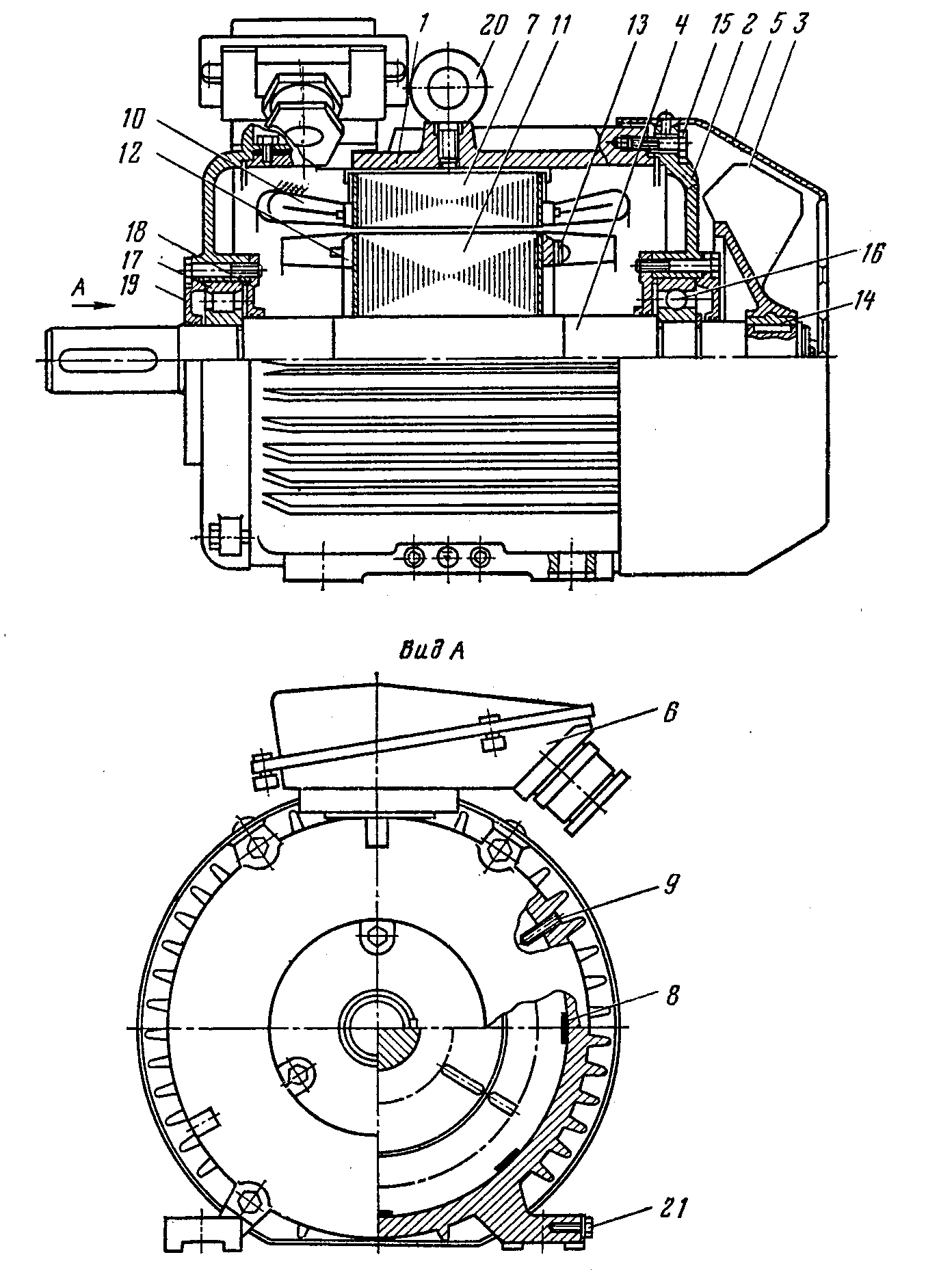 И хотя применение подобного механизма контроля позволит снизить энергопотребление вентиляторов в системе, он является менее эффективным и менее точным, чем VFD.
И хотя применение подобного механизма контроля позволит снизить энергопотребление вентиляторов в системе, он является менее эффективным и менее точным, чем VFD.
Еще одной потенциальной областью применения для VFD является система с регулируемым потоком хладагента. Подобные системы используются для подключения одного или нескольких компрессоров к общей системе подачи хладагента, которая питает несколько испарителей. Поскольку нагрузка на компрессор постоянно меняется в зависимости от режима работы испарителей, VFD может применяться для контроля над рабочей скоростью компрессора в зависимости от текущей нагрузки, что позволяет снизить потребление энергии при неполной загрузке.
МНЕНИЕ ЭКСПЕРТОВ О VFD-ТЕХНОЛОГИИЭрик Галлант, эксперт по критически важным приложениям, Lee Technologies (США):— Последние технологические достижения в области разработки модулей CRAH позволили добиться существенного снижения энергопотребления, которое легко измерить. Один из моих клиентов захотел установить в серверное помещение дополнительный кондиционер. На тот момент в серверной уже был установлен модуль CRAH Stulz-ATS, запущенный в 1999 году. Мы установили новый кондиционер Stulz-ATS Cyberair 2, имеющий такую же мощность, но оснащенный VFD (реализация технологии VFD от Stulz называется EC fan). Установив модули рядом и поддерживая постоянный температурный режим в помещении, мы смогли измерить энергопотребление каждого кондиционера. Таким образом, мы выяснили, что новый модуль поддерживал требуемый уровень температуры, потребляя при этом на 50 % меньше энергии. Более того, Stulz-ATS Cyberair 2 работает гораздо тише и требует минимального техобслуживания. Разумеется, далеко не всегда удается добиться 50 %-ного снижения энергопотребления для модулей CRAH. Впрочем, экономия в размере 20–60 % — это вполне реальная перспектива. Деннис Симански, старший менеджер проектов в Научно-исследовательском институте электроэнергетики (EPRI, США):
— Большой интерес представляет использование технологии VFD в системах непосредственного охлаждения (DX), где воздух пропускается через испаритель системы кондиционирования вместо охлаждения с помощью контура с холодной водой. Некоторые производители предостерегали специалистов отрасли ЦОД от использования приводов с переменной скоростью в критически важных системах, где применяется непосредственное охлаждение. Однако существует огромное количество экспериментальных данных, которые позволяют утверждать, что опасения беспочвенны. Тестирование технологии VFD в системе непосредственного охлаждения на базе принадлежащего EPRI дата-центра привело к сокращению энергопотребления вентиляторов на 77 % (с 0,17 до 0,04 кВт). Мы оснастили вентиляторы частотно-регулируемыми приводами и начали постепенно сбрасывать скорость их работы. Был протестирован широкий диапазон скоростей. Единственное, на что обратил внимание ИТ-персонал в ходе проведения тестирования, — в ЦОД стало значительно тише. Мы продолжаем анализировать полученные данные, но на данный момент результат выглядит потрясающе. Каждый раз, когда мы меняем скорость вращения вентиляторов, мы анализируем работу дата-центра. Проблем пока не возникало. Подобную модернизацию легко осуществить. Мы установили VFD в режиме байпас, так что при необходимости их всегда можно отключить. |
 Мне выпала уникальная возможность провести сравнение кондиционера с традиционными вентиляторами, имеющими постоянную скорость вращения, и кондиционера с технологией VFD.
Мне выпала уникальная возможность провести сравнение кондиционера с традиционными вентиляторами, имеющими постоянную скорость вращения, и кондиционера с технологией VFD. Если предположить, что стоимость электроэнергии составляет 10 центов за 1 кВт∙ч, то можно добиться ежегодной экономии в размере $1700-$4900 на каждый модуль CRAH, установленный в ЦОД. Дополнительная экономия достигается за счет того, что VFD-вентиляторы не используют ремней, шкивов, приводов и прочих механических деталей, требующих регулярного технического обслуживания.
Если предположить, что стоимость электроэнергии составляет 10 центов за 1 кВт∙ч, то можно добиться ежегодной экономии в размере $1700-$4900 на каждый модуль CRAH, установленный в ЦОД. Дополнительная экономия достигается за счет того, что VFD-вентиляторы не используют ремней, шкивов, приводов и прочих механических деталей, требующих регулярного технического обслуживания.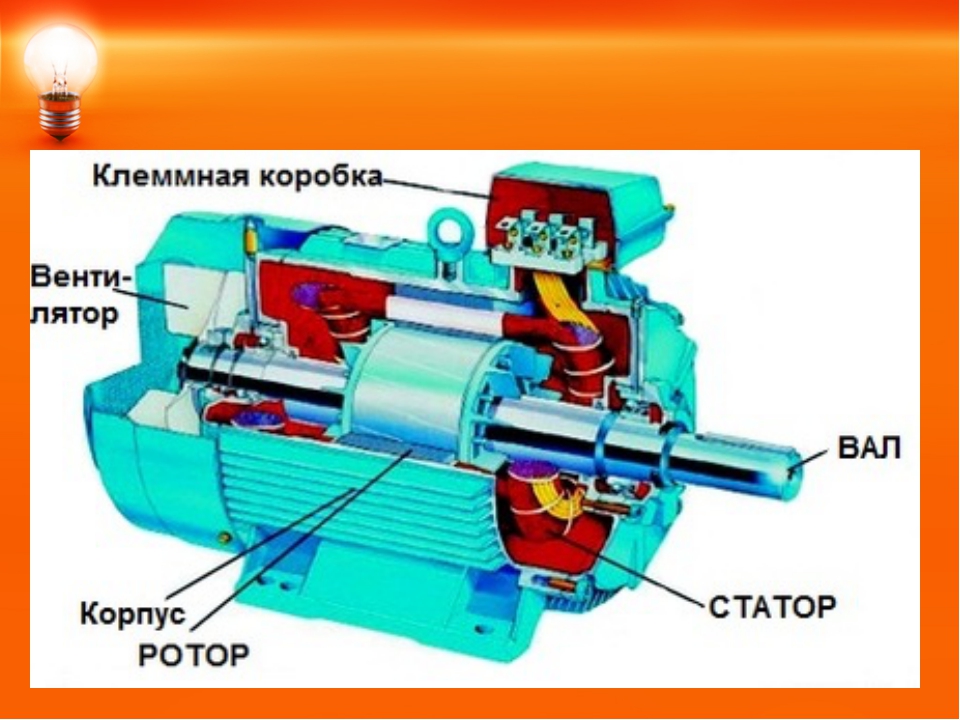 Проблема заключается в том, что сокращение воздушного потока, проходящего через модули DX, может приводить к появлению конденсата и обледенению.
Проблема заключается в том, что сокращение воздушного потока, проходящего через модули DX, может приводить к появлению конденсата и обледенению. Данная стратегия может быть особенно привлекательной для небольших старых ЦОД, в которых изоляция холодных и горячих участков обойдется слишком дорого.
Данная стратегия может быть особенно привлекательной для небольших старых ЦОД, в которых изоляция холодных и горячих участков обойдется слишком дорого.Применение технологии VFD в отрасли ЦОД
В центрах обработки данных (ЦОД) вопросам энергоэффективности уделяется особое внимание. Учитывая, что на долю систем кондиционирования приходится больше половины энергозатрат от всех инженерных систем, проблема снижения энергопотребления вентиляторов и компрессоров — одна из важнейших в современных дата-центрах.
Вентиляторы с переменной скоростью вращения для кондиционеров
| Рис. 3. Вентиляционный модуль PowerAire Quad, встраиваемый в фальшпол, от компании Tate |
Вентиляторы в модулях CRAC (Computer Room Air Conditioner, шкафной прецизионный кондиционер) потребляют большой объем энергии, примерно соответствующий 5–10 % от общего энергопотребления дата-центра (больше потребляют только компрессоры). Модули, как правило, не умеют адаптировать скорость вращения вентиляторов к постоянно меняющейся нагрузке на сервера. Рабочие условия ЦОД подвержены изменениям, и поэтому вентиляторы с переменной скоростью вращения (VSD) имеет смысл использовать везде, где это возможно.
Модули, как правило, не умеют адаптировать скорость вращения вентиляторов к постоянно меняющейся нагрузке на сервера. Рабочие условия ЦОД подвержены изменениям, и поэтому вентиляторы с переменной скоростью вращения (VSD) имеет смысл использовать везде, где это возможно.
Для многих модулей CRAC существует возможность модернизации для использования VSD. Одной из разновидностей VSD является частотно-регулируемый привод (VFD), позволяющий вентилятору работать на пониженной скорости за счет изменения частоты электрического тока, подаваемого на двигатель.
Для обеспечения качественного охлаждения и поддержки механизма многократного резервирования дата-центры одновременно используют несколько модулей CRAC. Это может приводить к сокращению цикла работы системы охлаждения и возникновению высокого давления в камере охлаждения, что, в свою очередь, вызывает повышение энергопотребления (компрессор в модуле CRAC, работающий по сокращенному циклу, включается и выключается слишком часто, что снижает эффективность работы системы).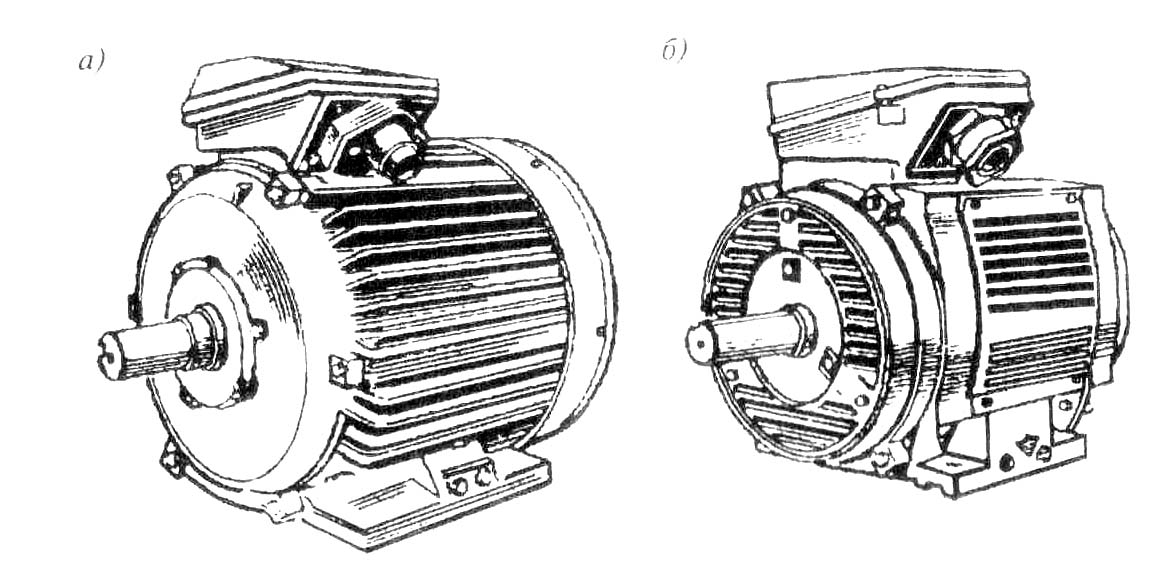
VSD позволяют экономить энергию за счет колебаний в уровне нагрузки ЦОД. Энергопотребление вентилятора пропорционально кубу скорости, так что снижение скорости вращения позволяет серьезно уменьшить потребление энергии. Снижение скорости вращения вентиляторов на 10 % сокращает энергопотребление примерно на 25 %. Снижение скорости на 20 % приводит к экономии до 45 %.
Вентиляционные модули, встраиваемые в фальшпол
В дата-центрах с высокой плотностью теплоизбытков кондиционирования шкафными кондиционерами может быть недостаточно — к серверам через фальшпол поступает недостаточно холодного воздуха.
В этом случае в фальшпол встраиваются вентиляционные модули, способные в 2–3 раза увеличить расход подаваемого в стойки воздуха. Конечно, эти меры отрицательно влияют на энергоэффективность. Для снижения потребляемой в подобных вентиляционных модулях энергии также используется технология VFD.
Отметим, что помимо энергосбережения регулирование встраиваемых в пол модулей удобно в эксплуатации: подаваемый ими расход можно занизить при перемещении некоторого серверного оборудования.
Юрий Хомутский, технический редактор журнала «МИР КЛИМАТА»
Двигатель электромобиля – разновидности и принцип работы
Экологичные автомобили, будь-то «чистые» электромобили или плагин-гибриды объединяет наличие электродвигателя, в качестве основной движущей силы. Работа современного электрического двигателя основана на принципе электромагнитной индукции, в базе которого лежит выработка электродвижущей силы в замкнутом контуре с изменением магнитного потока. Технология не нова, однако современные достижения науки и техники позволили развить ее до невероятных высот. Немалую роль в этом сыграла и возросшая в десятки раз мощность и емкость аккумуляторных батарей, которые выполняют роль топливного бака в современных электрических и гибридных автомобилях.
Электромобиль Nissan Leaf в «разрезе»: батарея с электродвигателем
Тем не менее, нельзя со 100% уверенностью утверждать, что все электродвигатели одинаковы.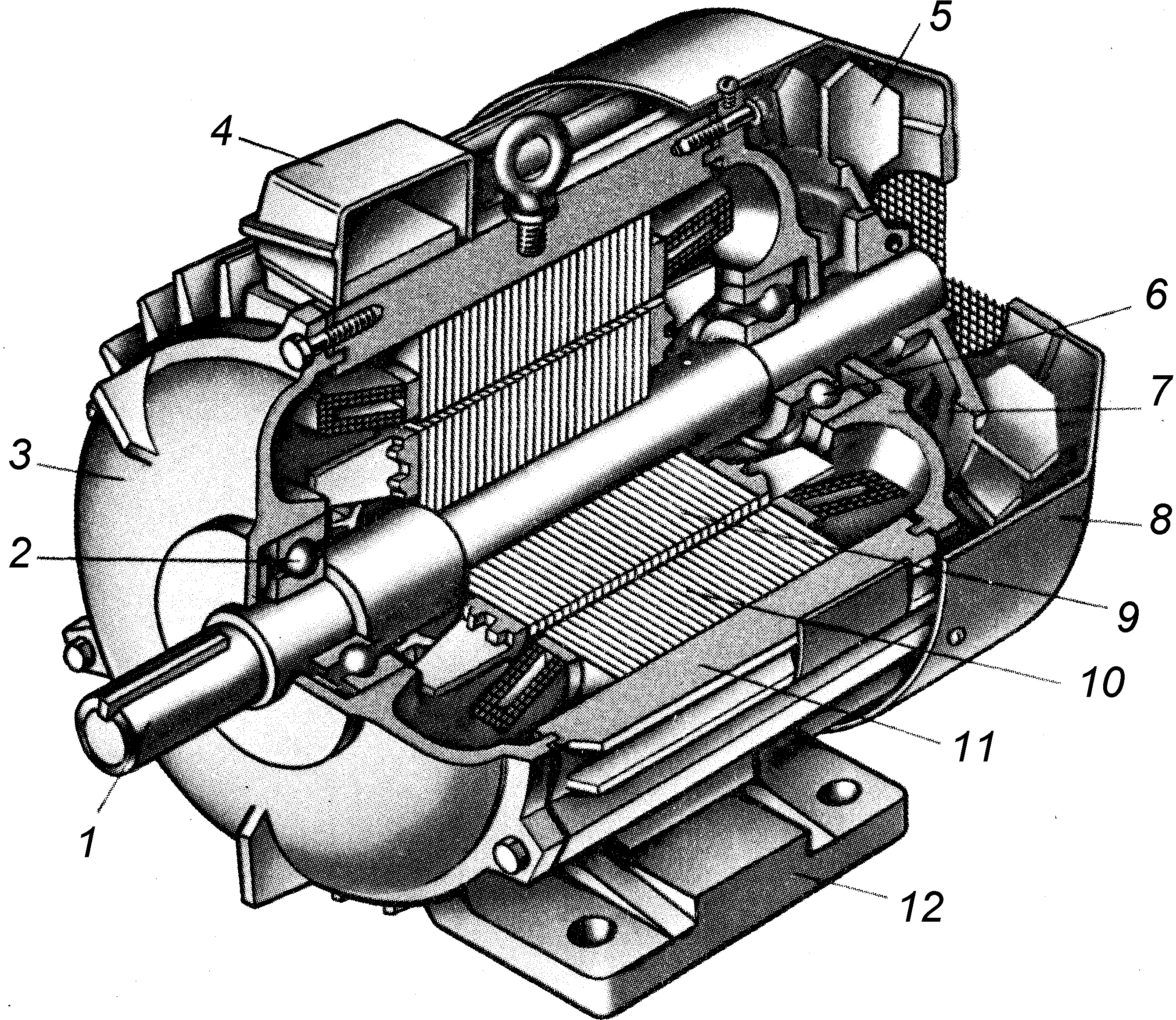 Многие ошибочно считают электродвигатель довольно простой установкой, однако стоит, к примеру, учитывать тот факт, что в отличии от ДВС, у электрического двигателя практически 90% КПД выделяемой энергии идет на создание крутящего момента. Согласитесь, что подобную мощность необходимо обуздать и уметь с ней обращаться, а для этого нужно знать некоторые нюансы о работе и разновидностях электрических двигателей.
Многие ошибочно считают электродвигатель довольно простой установкой, однако стоит, к примеру, учитывать тот факт, что в отличии от ДВС, у электрического двигателя практически 90% КПД выделяемой энергии идет на создание крутящего момента. Согласитесь, что подобную мощность необходимо обуздать и уметь с ней обращаться, а для этого нужно знать некоторые нюансы о работе и разновидностях электрических двигателей.
Электродвигатели – особенности эксплуатации и принцип работы
К главным особенностям электрического двигателя относится несколько важных характеристик:
- Крутящий момент мотора достигает своего максимума сразу при включении, таким образом, электромобили не требуют наличия характерных для ДВС стартеров и сцеплений.
- Работа агрегата на обширном числе оборотов, позволяет электромобилю обходиться без коробки переключения передач. Для изменения стороны вращения двигателя (включение заднего хода) достаточно поменять полярности.
Электродвигатель Nissan Leaf
Однако все понимают, что стартовать на электромобиле со всего потенциала крутящего момента, который гораздо мощнее многих автомобилей с ДВС, никто не будет. По меньшей мере, это небезопасно, и что немаловажно это влечет неэффективный расход заряда батарей. Поэтому традиционно электродвигатели должны отвечать следующим требованиям:
По меньшей мере, это небезопасно, и что немаловажно это влечет неэффективный расход заряда батарей. Поэтому традиционно электродвигатели должны отвечать следующим требованиям:
- иметь безопасное и удобное для эксплуатации строение;
- обладать гарантией длительной эксплуатации;
- иметь компактные габариты.
Как уже упоминалось, работа современного электродвигателя основана на давно известном принципе электромагнитной индукции. Традиционно агрегат состоит из недвижимого элемента – статора, и крутящегося – ротора. Статор имеет ряд обмоток на которые поступает электрический ток, что приводит к появлению магнитного поля, при котором ротор начинает свое движение. Скоростные показатели ротора определяются частотой, с которой происходит переключение тока с одной обмотки статора на другую.
Двигатели для электромобилей – разновидности и классификация
В современных автомобилях с электрической тягой серийного производства наиболее часто используют три типа электрических двигателей.
Асинхронные двигатели. Моторы непостоянного тока, в которых скорость вращения ротора различается с потенциалом напряжения магнитного поля, созданным источником питания. Различают одно, двух и трехфазные агрегаты асинхронного типа.
Асинхронный трехфазный электродвигатель переменного тока Tesla Model S
Синхронные двигатели. Электромотор, работающий на переменном токе, с движением ротора полностью симметричным электромагнитному полю. Подобные электродвигатели используют при повышенных мощностях. Различают шаговые и вентильные синхронные электродвигатели. Для первых характерно точное расположение ротора с подачей питания на конкретную обмотку, а чтобы изменить положение ротора, напряжение между обмотками необходимо перенаправить. Для второго типа агрегатов характерно питание от полупроводниковых составляющих.
Синхронный электродвигатель с постоянным магнитом Mitsubishi i-MiEV
Двигатель-колесо. Тип электромотора сила напряжения и крутящий момент которого рассчитан на конкретное колесо.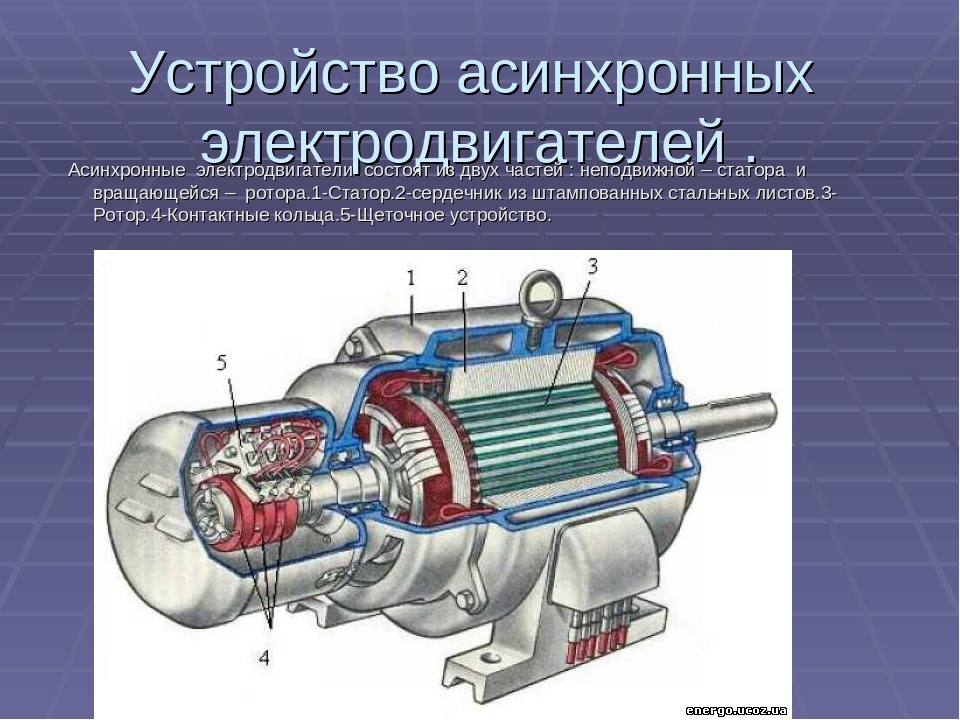 Данный тип электропривода часто используется в плагин-гибридных автомобилях в рабочем тандеме с двигателем внутреннего сгорания. Агрегат может устанавливаться непосредственно в колесо, однако современные электромобили все больше отходят от такого расположения мотора, поскольку это увеличивает удельный вес шасси и снижает управляемость. Более рационально стало использовать двигатель в качестве полноценного привода для вращения колеса.
Данный тип электропривода часто используется в плагин-гибридных автомобилях в рабочем тандеме с двигателем внутреннего сгорания. Агрегат может устанавливаться непосредственно в колесо, однако современные электромобили все больше отходят от такого расположения мотора, поскольку это увеличивает удельный вес шасси и снижает управляемость. Более рационально стало использовать двигатель в качестве полноценного привода для вращения колеса.
Двигатель-колесо
Что касается регулировок управления электродвигателя, то за преобразование постоянного тока от аккумуляторных батарей в трехфазный переменный – отвечает инвертор.Трансмиссия – выполняющая роль сцепления и коробки передач, зачастую представлена одноступенчатым зубчатым редуктором.Остальные параметры работы электродвигателя регулируют электронная система управления, которая индивидуальна для каждой марки электрокара или гибрида.
Видео как работает электродвигатель и другие механизмы электромобиля на примере Tesla Model S
 youtube.com/embed/3SAxXUIre28″ frameborder=»0″ allowfullscreen=»allowfullscreen»/>
youtube.com/embed/3SAxXUIre28″ frameborder=»0″ allowfullscreen=»allowfullscreen»/>
Хотелось бы подчеркнуть, что представленная классификация и система работы электродвигателей далеко не финальная. Стремительное развитие отрасли эко автомобилей только входит в начальную стадию, поэтому кардинального изменения принципа работы, мощности, строения электромоторов можно ожидать уже в ближайшее время.
Какие электродвигатели используются в гибридных и плагин-гибридных автомобилях
Гибридные автомобили имеют собственную специфику использования электромоторов. Во многом электродвигатель гибрида выполняет роль вспомогательного элемента, повышающего мощность основного двигателя внутреннего сгорания и снижающего уровень потребления топлива.
Электродвигатели используемые в гибридах можно разделить на несколько разновидностей:
- Встроенная помощь мотору. Электродвигатель который берет на себя часть усилий по созданию крутящего момента при движении.
- Встроенный генератор стартера. Электродвигатель, который только приводит автомобиль в движение.
- Старт/стоп двигатель. Электродвигательная система, которая отключает основной ДВС при остановке и мгновенно запускает его при начале движения.

Кроме указанных подвидов классифицируют три типа использования электродвигателя:
- Параллельной работы. В данном типе электродвигатель питается от батарей, а ДВС от топливного бака. Обе категории двигателей создают крутящий момент для движения автомобиля.
- Последовательной работы. Заведенный двигатель внутреннего сгорания включает генератор, который или заводит электродвигатель или подзаряжает аккумуляторный блок.
- Параллельно-последовательной работы. Данный тип гибридного двигателя соединяет электромотор, генератор, ДВС и колеса редуктором.
По большей части в гибридах используется принцип параллельной работы электродвигателя и ДВС.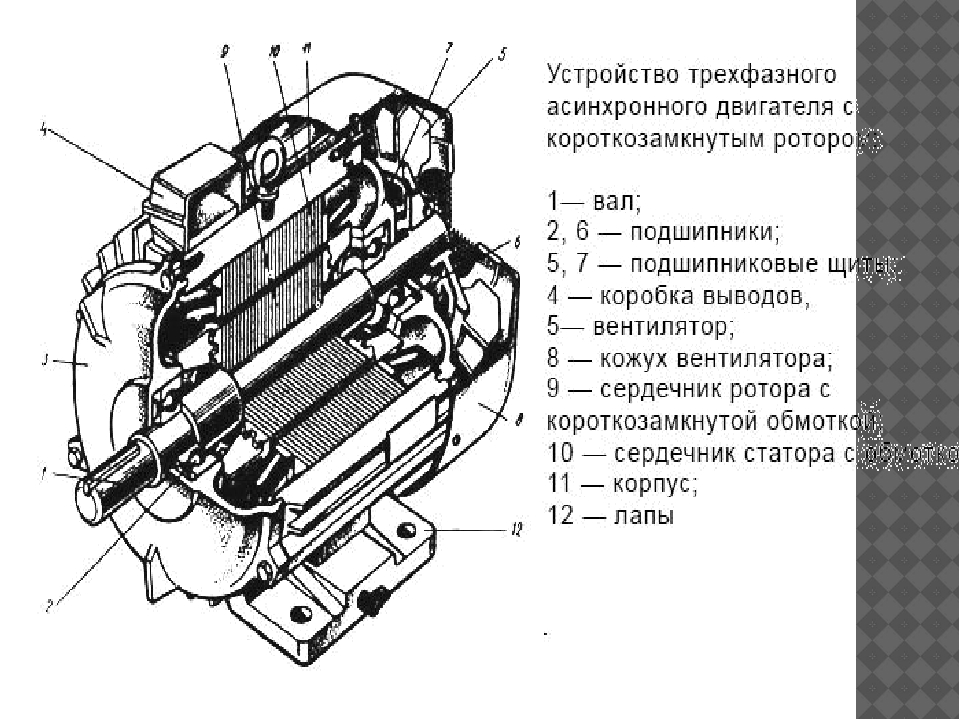 Его применяют также в подключаемых гибридах (плагин-гибридах), в которых по мере истечения заряда аккумуляторных батарей подключается ДВС малой мощности, работа которого в направлена на восполнение заряда АКБ.
Его применяют также в подключаемых гибридах (плагин-гибридах), в которых по мере истечения заряда аккумуляторных батарей подключается ДВС малой мощности, работа которого в направлена на восполнение заряда АКБ.
Видео работы новой гибридной системы плагин-гибрида Toyota Prius
Преимущества и недостатки использования электродвигателей
Как и любой двигатель, электромотор в электромобиле имеет собственные плюсы и минусы использования. Для понимания данных особенностей электромоторов приведем таблицу:
| Преимущества | Недостатки |
|---|---|
|
|

Будущие перспективы электродвигателя в автомобилях
Говорить о перспективах, при активном использовании электродвигателей в автомобилях, уже не разумно. Сейчас можно говорить только о происходящих и грядущих улучшениях электромоторов.
Сам электродвигатель, это достаточно совершенное устройство, апгрейд которого происходит исключительно в зависимости от потенциала использования. Ближайшие тенденции по улучшению электродвигателя направлены в сторону уменьшения размеров и массы, с сохранением и увеличением производительности.
Гораздо больше работы проводится по улучшению источников энергии для электродвигателя, а точнее аккумуляторных батарей. Их также стараются сделать меньше и легче, увеличивая объем, отдачу энергии, но при этом снижая время на подзарядку. Работа над АКБ устанавливаемых на электромобили, сейчас наиболее приоритетная в отрасли производства электромобилей, гибридных и плагин-гибридных авто.
Их также стараются сделать меньше и легче, увеличивая объем, отдачу энергии, но при этом снижая время на подзарядку. Работа над АКБ устанавливаемых на электромобили, сейчас наиболее приоритетная в отрасли производства электромобилей, гибридных и плагин-гибридных авто.
Автор: hevcars.com.ua
Еще интересное пишут по теме
HEVCARS 🔌 Автор
Читайте самые интересные новости и статьи о электрокарах в Telegram и Google Новости!IM 9633, исп.Б4 |
IM 9633, исп.Б5 |
IM 3031 |
IM 3011 |
|||||||||||||||||||
Лапы на корпусе станины сверху, конический вал Ø55, с наружной резьбойМ36х3 и гайкой на валу |
Лапы на корпусе станины снизу, конический вал Ø55, с наружной резьбойМ36х3 и гайкой на валу |
фланцевое, |
фланцевое, цилиндрический |
|||||||||||||||||||
IM 9633, исп. |
IM 9633, исп.Б5 |
IM 3031 |
IM 3011 |
|||||||||||||||||||
Лапы на корпусе станины сверху, конический вал Ø55, с наружной резьбойМ36х3 и гайкой на валу |
Лапы на корпусе станины снизу, конический вал Ø55, с наружной резьбойМ36х3 и гайкой на валу |
фланцевое, |
фланцевое, цилиндрический |
|||||||||||||||||||
Тип двигателя |
Мощность, кВт |
Скольжение, % |
Частота вращения об/мин |
КПД, % |
cos φ |
Номинальный ток при U=380В, А |
Ммакс |
Мпуск |
Ммин |
Iпуск |
Масса, кг |
|||||||||||
IM 3011, IM3033 (вариант Б18) |
||||||||||||||||||||||
ВАСО7К-6,5-12 |
6,5 |
4,8 |
500 |
80 |
0,67 |
18,4 |
2,1 |
1,3 |
0,6 |
4,0 |
190 |
|||||||||||
ВАСО7К-9-12 |
9 |
4,7 |
500 |
80 |
0,74 |
23,1 |
1,8 |
0,95 |
0,6 |
3,5 |
200 |
|||||||||||
IM 9633 (варианты Б4, Б5, Б19) |
||||||||||||||||||||||
ВАСО7К-11-12 |
11 |
5,0 |
500 |
88,0 |
0,71 |
32 |
2,2 |
1,6 |
0,6 |
5,0 |
260 |
|||||||||||
ВАСО7К-13-12 |
13 |
5,0 |
500 |
88,0 |
0,71 |
32 |
2,2 |
1,6 |
0,6 |
5,0 |
290 |
|||||||||||
ВАСО7К-15-12 |
15 |
3,5 |
500 |
88,0 |
0,65 |
40 |
2,2 |
1,6 |
0,6 |
5,0 |
300 |
|||||||||||
IM 9633 (варианты Б11, Б14, Б16) |
||||||||||||||||||||||
ВАСО7К-11-14 |
11 |
4,0 |
428,6 |
86,0 |
0,7 |
27,8 |
1,1 |
1,8 |
0,6 |
4,0 |
390 |
|||||||||||
ВАСО7К-13-12 |
13 |
5,0 |
500 |
88,0 |
0,71 |
32 |
2,2 |
1,6 |
0,6 |
5,0 |
* |
|||||||||||
ВАСО7К-15-12 |
15 |
3,5 |
500 |
88,0 |
0,65 |
40 |
2,2 |
1,6 |
0,6 |
5,0 |
* |
|||||||||||
ВАСО7К-18,5-12 |
18,5 |
3,0 |
500 |
87,0 |
0,7 |
46 |
1,6 |
1,3 |
0,6 |
5,0 |
* |
|||||||||||
IM 9633, IM9733 |
||||||||||||||||||||||
ВАСО7К-15-14 |
15 |
2,0 |
428,6 |
85,5 |
0,68 |
39 |
1,8 |
1,1 |
0,6 |
4,0 |
450 |
|||||||||||
ВАСО7К-22-14 |
22 |
2,5 |
428,6 |
90,0 |
0,73 |
51 |
2,0 |
1,0 |
0,6 |
5,0 |
800 |
|||||||||||
ВАСО7К-30-14 |
30 |
2,5 |
428,6 |
90,5 |
0,75 |
67 |
2,0 |
1,0 |
0,6 |
5,0 |
880 |
|||||||||||
ВАСО7К-37-14 |
37 |
2,5 |
428,6 |
91,0 |
0,77 |
80 |
2,0 |
1,0 |
0,6 |
4,5 |
1005 |
|||||||||||
ВАСО7К-11-16 |
11 |
2,0 |
375 |
89,0 |
0,66 |
49,3/28,5* |
1,7 |
1,0 |
4 |
4,0 |
500 |
|||||||||||
ВАСО7К-22-16 |
22 |
2,0 |
375 |
83,0 |
0,65 |
62 |
1,8 |
1,0 |
0,6 |
4,0 |
550 |
|||||||||||
ВАСО7К-30-16 |
30 |
2,0 |
375 |
83,5 |
0,65 |
84 |
1,8 |
1,0 |
0,6 |
4,0 |
650 |
|||||||||||
ВАСО7К-37-16 |
37 |
2,0 |
375 |
84,0 |
0,65 |
103 |
1,8 |
1,0 |
0,6 |
4,5 |
750 |
|||||||||||
ВАСО7К-37-20 |
37 |
2,0 |
300 |
89,5 |
0,70 |
90 |
1,8 |
1,0 |
0,6 |
4,5 |
950 |
|||||||||||
ВАСО7К-45-20 |
45 |
2,0 |
300 |
87,0 |
0,65 |
122 |
1,8 |
1,0 |
0,6 |
5,0 |
1050 |
|||||||||||
Тип электродвигателя |
ВАСО 7К |
|||||||||||||||||||||
Мощность, кВт |
6,5 |
9 |
11 |
13 |
15 |
18,5 |
9 |
13 |
15 |
18. |
22 |
30 |
37 |
37 |
37 |
45 |
|
|||||
Количество полюсов |
12 |
14 |
16 |
20 |
|
|||||||||||||||||
Напряжение, В |
380 |
380/660 |
|
|||||||||||||||||||
Частота сети, Гц |
50, 60 |
|||||||||||||||||||||
Климатическое исп. |
У1(от-60ºC до +40ºC), ХЛ1 (от-60ºC до +40ºC), УХЛ1(от-60ºC до +40ºC) Т1(от-10ºC до +50ºC) |
|||||||||||||||||||||
Исполнение по взрывозащите |
1ExdIIBT4 |
1ExdIICT4 |
||||||||||||||||||||
Степень защиты |
стандартная (IP54) |
IP55 |
||||||||||||||||||||
Класс изоляции |
стандартный ( F ) |
|
||||||||||||||||||||
Режим работы |
стандартный (S1) |
|
||||||||||||||||||||
Возможна работа при подключении напрямую к сети переменного тока, |
||||||||||||||||||||||
Характеристика нагрузки: вентиляторная (М~n2) |
||||||||||||||||||||||
Тепловая защита двигателя в обмотке статора (только по заказу): РТС термисторы, биметаллическое реле |
||||||||||||||||||||||
Наличие гнезд под установку термопреобразователей для измерения температуры подшипников: |
||||||||||||||||||||||
Ниппель для замены и пополнения смазки подшипников. |
||||||||||||||||||||||
Площадка под установку датчика вибрации: ИВД-1, DVA-1-3-2, DVA-1-4-1 |
||||||||||||||||||||||
Покраска: грунтовка ЭП0010 красно-коричневая; МЛ-12 серая; Темадур50, RAL9023 серебристо-серый; Темадур50, RAL9023 голубой. |
||||||||||||||||||||||
Варианты исполнений по способу монтажа |
ВАСО7К-13-12, ВАСО7К-15-12: IM9733, исп. |
|||||||||||||||||||||
ВАСО7К-13 (15)-12, ВАСО7К-18,5-12, ВАСО7К-15-14: IM9633, исп.Б11 |
||||||||||||||||||||||
ВАСО7К-9-12, ВАСО7К-13-12, ВАСО7К-15-12: IM9633, Б4 |
||||||||||||||||||||||
ВАСО7К-9-12, ВАСО7К-13-12, ВАСО7К-15-12: IM9633, Б5 |
||||||||||||||||||||||
ВАСО7К-13-12: IM9633, Б16 |
||||||||||||||||||||||
ВАСО7К-14, ВАСО7К-37-20: М9633 |
||||||||||||||||||||||
ВАСО7К-6,5-12, ВАСО7К-9-12: IM3011, IM3031 |
||||||||||||||||||||||

 Б4
Б4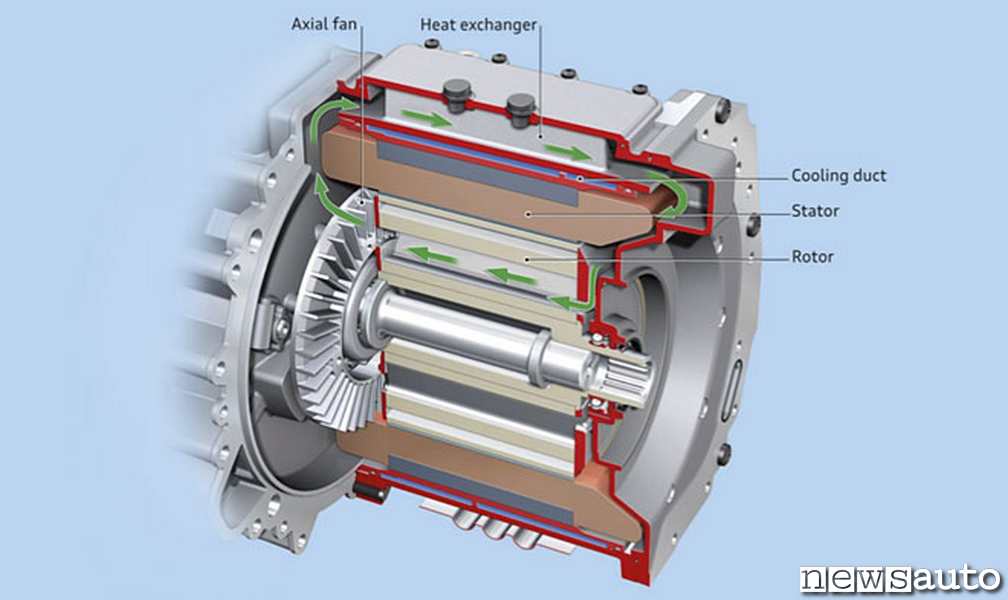 5
5

 Б14, Б19
Б14, Б19| Асинхронный двигатель
Наиболее часто используемым двигателем в мире является асинхронный двигатель. Это двигатель, который может работать без электрического подключения к ротору. В этом посте будут обсуждаться асинхронные двигатели (асинхронные двигатели), их типы, то есть однофазные, трехфазные, беличий корпус, контактное кольцо и т. Д., Особенности, принцип работы, применение, преимущества и недостатки.
Асинхронный двигатель или асинхронный двигатель — это самый основной и распространенный тип электродвигателя, который имеет только обмотки Armortisseur. означает вспомогательную обмотку только на якоре.В асинхронном двигателе (или асинхронном двигателе) статорная часть двигателя передает электромагнитное поле своей обмоткой на роторную часть двигателя. Это генерирует электрический ток в роторе. Электрический ток создает крутящий момент, который приводит в движение.
Рис.1 — Введение в асинхронный двигатель (асинхронный двигатель)
Он упоминается как «Асинхронный двигатель », поскольку он всегда будет работать со скоростью, меньшей, чем его синхронная скорость.Синхронная скорость определяется как скорость магнитного поля вращающейся машины, которая снова определяется количеством полюсов и частотой в машине.
Так как в этом типе двигателя ротор получает поток и вращение за счет магнитного поля в статоре, существует задержка между токами в статоре и роторе. Из-за этого ротор никогда не достигает своей синхронной скорости. Отсюда и термин «асинхронный двигатель». На рис. 2 показаны части асинхронного двигателя.
Из-за этого ротор никогда не достигает своей синхронной скорости. Отсюда и термин «асинхронный двигатель». На рис. 2 показаны части асинхронного двигателя.
Фиг.2 — Детали асинхронного двигателя (асинхронный двигатель)
Конструкция асинхронного двигателя (асинхронного двигателя)
Он состоит в основном из двух частей, а именно:
Статор
Это неподвижная часть электродвигателя. Эта часть обеспечивает электромагнитное поле, необходимое для вращения вращающейся части двигателя. Он состоит из ряда штамповок с прорезями для размещения трехфазной обмотки. Каждая обмотка отделена от другой обмотки на 120 градусов.
Ротор
Это вращающаяся часть двигателя. Более распространенный тип ротора в асинхронных двигателях (или асинхронных двигателях) — это ротор с короткозамкнутым ротором. Ротор имеет форму якоря с сердечником цилиндрической формы. Вокруг сердечника есть параллельные прорези, через которые проходит ток.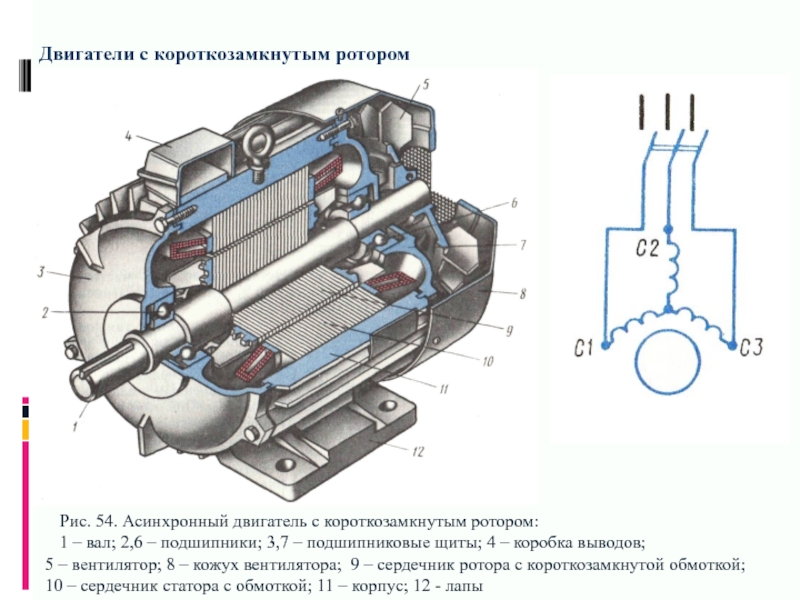 Сердечник имеет стержень из алюминия, меди или сплава.
Сердечник имеет стержень из алюминия, меди или сплава.
Рис.3 — Базовый ротор и статор
Типы асинхронных двигателей (асинхронные двигатели)Он подразделяется на два типа:
- Однофазный асинхронный двигатель
- Трехфазный асинхронный двигатель
Однофазный асинхронный двигатель
Однофазный асинхронный двигательне является двигателем с автоматическим запуском.Здесь двигатель подключен к однофазному источнику питания, который передает переменный ток к основной обмотке. Поскольку источник переменного тока представляет собой синусоидальную волну, он создает пульсирующее магнитное поле в обмотке статора.
Пульсирующие магнитные поля — это два магнитных поля, вращающихся в противоположных направлениях; следовательно, крутящий момент не создается. Таким образом, после подачи тока ротор должен быть перемещен в любом направлении извне, чтобы двигатель заработал. Однофазный индуктор отсюда; могут иметь разные разновидности в зависимости от устройства, с которого запускается двигатель, и это:
Однофазный индуктор отсюда; могут иметь разные разновидности в зависимости от устройства, с которого запускается двигатель, и это:
- Двухфазный двигатель
- Двигатель с экранированными полюсами
- Конденсаторный пусковой двигатель
- Конденсаторный пусковой и конденсаторный двигатель
Фиг.4 — Принципиальная схема (а) однофазного (б) трехфазного асинхронного двигателя
Трехфазный асинхронный двигатель (асинхронный двигатель)
Это двигатели, для запуска которых не требуется никаких внешних устройств, таких как конденсатор, центробежный переключатель или пусковая обмотка. Принцип работы этого двигателя основан на использовании трех однофазных фаз, разность фаз между которыми составляет 120 градусов. Таким образом, магнитное поле, вызывающее вращение, будет иметь одинаковую разность фаз между ними, это заставит ротор двигаться без какого-либо внешнего крутящего момента.
Для дальнейшего упрощения предположим, что это три фазы: phase1, phase2 и phase3. Итак, первая фаза 1 намагничивается, и ротор начинает двигаться в этом направлении, вскоре после этого возбуждается фаза 2, и тогда ротор притягивается к фазе 2, а затем, наконец, к фазе 3. Таким образом, ротор продолжит вращаться.
Далее они подразделяются на категории в зависимости от типа используемого ротора:
- Асинхронный двигатель с короткозамкнутым ротором
- Асинхронный двигатель с контактным кольцом или двигатель с фазным ротором
Асинхронный двигатель с короткозамкнутым ротором
Ротор этого типа имеет форму беличьей клетки, отсюда и название.Ротор изготовлен из стали с очень токопроводящими металлами, такими как алюминий и медь на его поверхности. Скорость этого типа асинхронного двигателя очень легко изменить, просто изменив форму стержней в роторе.
Рис.5 — Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с контактным кольцом или двигатель с фазным ротором
Он также известен как асинхронный двигатель с фазовой обмоткой. Здесь ротор подключен к внешнему сопротивлению через контактные кольца.Скорость вращения ротора регулируется путем регулировки внешнего сопротивления. Поскольку этот двигатель имеет больше обмоток, чем асинхронный двигатель с короткозамкнутым ротором, его также называют асинхронным двигателем с фазным ротором.
Здесь ротор подключен к внешнему сопротивлению через контактные кольца.Скорость вращения ротора регулируется путем регулировки внешнего сопротивления. Поскольку этот двигатель имеет больше обмоток, чем асинхронный двигатель с короткозамкнутым ротором, его также называют асинхронным двигателем с фазным ротором.
Рис.6 — Асинхронный двигатель с контактным кольцом
Характеристики асинхронного двигателя (асинхронный двигатель)Ниже приведены характеристики двух различных типов асинхронных двигателей.
Характеристики однофазного асинхронного двигателя- Здесь мы выделим некоторые характеристики, которые применимы только к однофазным асинхронным двигателям:
- Однофазные асинхронные двигатели не самозапускаются и используют однофазное питание для вращения.
- Чтобы изменить направление вращения в однофазных двигателях, лучше всего остановить двигатель и изменить его, иначе существует вероятность повреждения двигателя из-за момента инерции, который действует против направления, на которое необходимо изменить вращение. .
- Для запуска двигателя вам потребуется конденсатор и / или центробежный переключатель.
- У этих двигателей низкий пусковой момент.
- Они в основном используются дома или в бытовых приборах из-за низкого коэффициента мощности и эффективности.
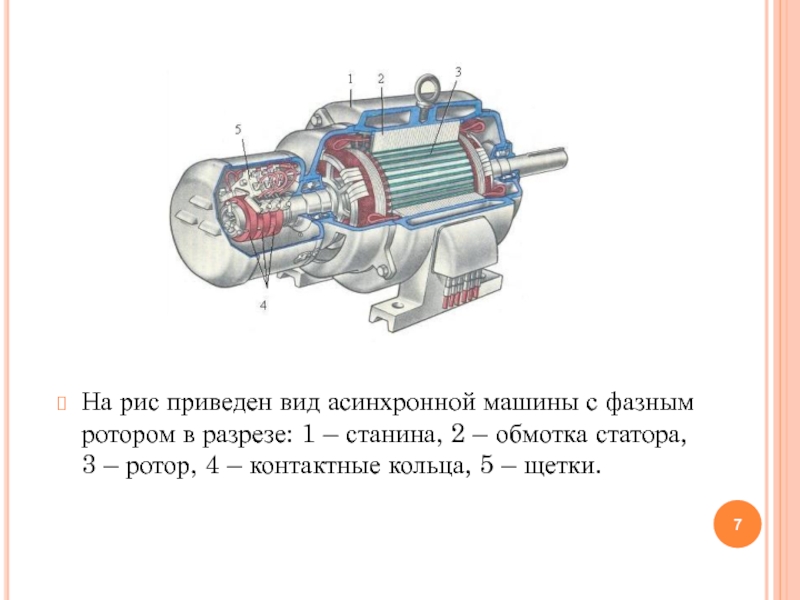 .
. Ниже перечислены некоторые особенности трехфазного асинхронного двигателя, которые отличает его от однофазного двигателя:
- Это автономные двигатели, не нуждающиеся в специальных пускателях.
- Имеются три однофазных линии с разностью фаз 120 градусов.
- Он имеет более простое подключение и более надежен, чем однофазные асинхронные двигатели.
- Пусковой крутящий момент у этих двигателей выше, чем у однофазных двигателей.
- Они в основном используются на заводах и в промышленности из-за высокого коэффициента мощности и эффективности.
Явление, которое заставляет работать асинхронные двигатели или асинхронные двигатели, весьма интересно. Двигатели постоянного тока нуждаются в двойном возбуждении для вращения, одно для статора, а другое для ротора.Но в этих двигателях мы должны отдавать это только статору, что делает это уникальным. Как следует из названия, принцип работы этого двигателя основан на индукции. Давайте предпримем ряд шагов, которые происходят при вращении этого двигателя:
Двигатели постоянного тока нуждаются в двойном возбуждении для вращения, одно для статора, а другое для ротора.Но в этих двигателях мы должны отдавать это только статору, что делает это уникальным. Как следует из названия, принцип работы этого двигателя основан на индукции. Давайте предпримем ряд шагов, которые происходят при вращении этого двигателя:
- На обмотки статора подается питание, идет ток и создается магнитный поток.
- Обмотка в роторе устроена таким образом, что каждая катушка закорачивается.
- Короткозамкнутая обмотка ротора обрезается магнитным потоком статора.
Рис.7 — Работа асинхронного двигателя
Согласно законам электромагнитной индукции Фарадея, магнитное поле взаимодействует с электрической цепью, создавая ЭДС (электродвижущую силу). Итак, согласно этому закону, в катушках ротора начинает течь ток.
- Ток в роторе генерирует другой поток.
- Теперь есть два потока: один в статоре, а другой в роторе.
- Поток ротора отстает от магнитного потока статора, что создает крутящий момент в роторе в направлении магнитного поля.

В числе приложений:
- Они широко используются в миксерах, игрушках, вентиляторах и т. Д.
- Они также используются в насосах и компрессорах.
- Малые асинхронные двигатели используются в электробритвах.
- Они используются в буровых машинах, лифтах, кранах и дробилках.
- Они подходят для приводов текстильных фабрик и маслоэкстракционных заводов.
Ниже приведены некоторые преимущества асинхронных двигателей:
- Высокоэффективный и простой в конструкции.
- Очень прочный и может работать в любых условиях.
- Низкие эксплуатационные расходы, поскольку у них не так много деталей, как коммутаторы или щетки.
- Они могут развивать очень высокую скорость, не беспокоясь о том, что они износятся, поскольку у них нет щеток.
- Они просты в эксплуатации, поскольку к ротору не подключены электрические разъемы.
- Поскольку у них нет щеток, искры не боятся, поэтому их можно использовать в загрязненных или взрывоопасных средах.
- Скорость от малой нагрузки до номинальной изменяется меньше.

Асинхронные двигатели имеют простую конструкцию, которая может иметь несколько недостатков, перечисленных ниже:
- Сложно контролировать скорость асинхронного двигателя, поэтому его нельзя использовать в местах, где требуется точный контроль скорости.
- При низких нагрузках наблюдается падение КПД.
- Они имеют высокие входные импульсные токи, что дает низкое напряжение при запуске двигателя.
См. Также: Видео на Youtube по асинхронным двигателям
 youtube.com/embed/AQqyGNOP_3o?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
youtube.com/embed/AQqyGNOP_3o?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/> Также читают: Маховик как накопитель энергии, расчеты и требования к ротору Повышающий трансформатор - работа, конструкция, применение и преимущества Синхронный двигатель - конструкция, принцип, типы, характеристики Что такое клещи (клещи-тестеры) - типы, принцип работы и правила эксплуатации
Лакшми — B.E (Электроника и связь) и имеет опыт работы в RelQ Software в качестве инженера-испытателя и HP в качестве руководителя службы технической поддержки. Она является автором, редактором и партнером Electricalfundablog.
Асинхронный двигатель | КСБ
Асинхронный двигатель имеет пассивный ротор, который закорочен постоянно (короткозамкнутый ротор) или временно (см. Ротор с контактным кольцом). Он может производить до нескольких мегаватт и чаще всего используется в качестве стандартного трехфазного двигателя в промышленных приложениях.
Магнитное поле в асинхронном двигателе создается током намагничивания, передаваемым через предоставленную электрическую энергию. Асинхронные двигатели характеризуются скольжением, т.е. е. зависящая от нагрузки разница между скоростью вращения ротора и скоростью вращающегося поля питающего напряжения.
Ротор представляет собой металлическую клетку с осевыми стержнями, расположенными симметрично по кругу и прикрепленными к кольцу короткого замыкания (концевому кольцу) на каждом конце.
Статор состоит из распределенных катушек, которые индуцируют напряжение на стержнях ротора (см. Индукция) посредством вращающегося магнитного поля.Это приводит к сильному протеканию тока в короткозамкнутых стержнях, который создает силу между ротором и статором в магнитном поле и приводит к электромагнитному взаимодействию, ответственному за асинхронизм. Асинхронные двигатели подвержены значительным потерям в статоре и роторе.
В двигателях с контактным ротором трехфазная обмотка ротора подключается к переменным резисторам, обычно используемым в качестве жидкостных пускателей, через контактные кольца. Такая конструкция обеспечивает плавный процесс запуска, который не создает ударной нагрузки на сеть электропитания и позволяет в определенной степени изменять скорость.Однако это также приводит к значительным потерям мощности.
Такая конструкция обеспечивает плавный процесс запуска, который не создает ударной нагрузки на сеть электропитания и позволяет в определенной степени изменять скорость.Однако это также приводит к значительным потерям мощности.
Обмотки ротора с короткозамкнутым ротором обычно состоят из одно- или двухпроводных шин, закороченных на концах кольцевым проводником. Роторы с короткозамкнутым ротором очень просты по конструкции, надежны и не требуют обслуживания. См. Рис.1 Асинхронный двигатель
Рис.1 Асинхронный двигатель: асинхронный двигатель в разрезе
В отношении контакта с водой различают двигатели с сухим ротором, погружные двигатели и двигатели с мокрым ротором. См. Рис.2 Асинхронный двигатель
| Внутреннее смачивание | Внешнее смачивание | ||||||
|---|---|---|---|---|---|---|---|
| Ротор | Обмотка | Сухой корпус | Влажный корпус (погружной | 903 сухой двигатель) 9030 | Сухой двигатель (с защитой от проникновения воды или без нее) | Сухой (заполненный воздухом) погружной двигатель | |
| Влажный (двигатель с мокрым ротором) | Сухой двигатель (герметичный двигатель) | Двигатель с мокрым ротором насоса с мокрым ротором | Полностью погружной двигатель (заполненный жидкостью) | ||||
Рис. 2 Асинхронный двигатель: Обозначение асинхронных двигателей в зависимости от влажности
2 Асинхронный двигатель: Обозначение асинхронных двигателей в зависимости от влажности
Сухой двигатель имеет разные типы защиты от проникновения воды (см. Тип защиты).
Погружной электродвигатель частично или полностью погружен в воду и обычно устанавливается в вертикальном положении. Тепло, вырабатываемое двигателем, передается непосредственно окружающей обрабатываемой жидкости. Его отличительной особенностью является корпус двигателя, который смачивается снаружи (см. Погружной электронасос).Внутреннее смачивание и глубина погружения отличают погружные двигатели с масляным или воздушным наполнением для малых и средних глубин погружения (погружные насосы для сточных вод) от полностью погружных двигателей.
См. Рис. 3, 4 Насос для сточных вод
Полностью погружные двигатели смачиваются жидкостью, находящейся внутри и снаружи. Они рассчитаны на любую глубину погружения и, прежде всего, используются в скважинах (см. Погружные скважинные насосы), поэтому они имеют небольшой диаметр и относительно длинные.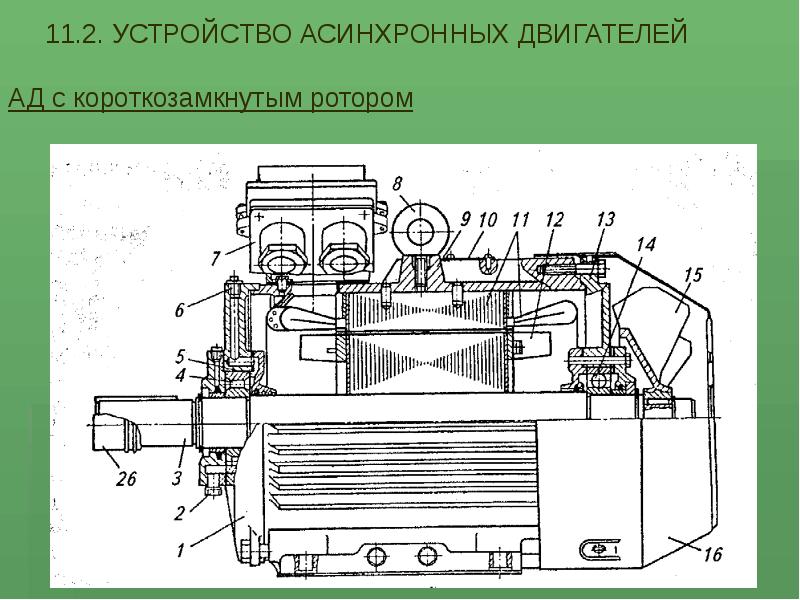 Полностью погружные двигатели могут быть оснащены мокрой обмоткой статора (включая водонепроницаемую пластиковую изоляцию) или, в сочетании с корпусом, сухой обмоткой (см. Герметичный моторный насос).
Полностью погружные двигатели могут быть оснащены мокрой обмоткой статора (включая водонепроницаемую пластиковую изоляцию) или, в сочетании с корпусом, сухой обмоткой (см. Герметичный моторный насос).
Двигатель с мокрым ротором заполнен жидкостью и, в отличие от погружного двигателя, его корпус не смачивается снаружи. Он имеет подшипники с жидкостной смазкой (см. Подшипники скольжения) и образует герметичный насосный агрегат (насос с мокрым ротором) вместе с насосом. Двигатель может быть оснащен мокрой обмоткой статора или, в сочетании с корпусом, сухой обмоткой, и часто является предпочтительным двигателем для циркуляционных насосов.
Асинхронный двигатель и синхронный: в чем разница?
Все вращающиеся электродвигатели переменного и постоянного тока работают за счет взаимодействия двух магнитных полей. Один из них стационарный и (обычно) связан с внешним кожухом двигателя. Другой вращается и связан с вращающимся якорем двигателя (также называемым его ротором). Вращение вызвано взаимодействием двух полей.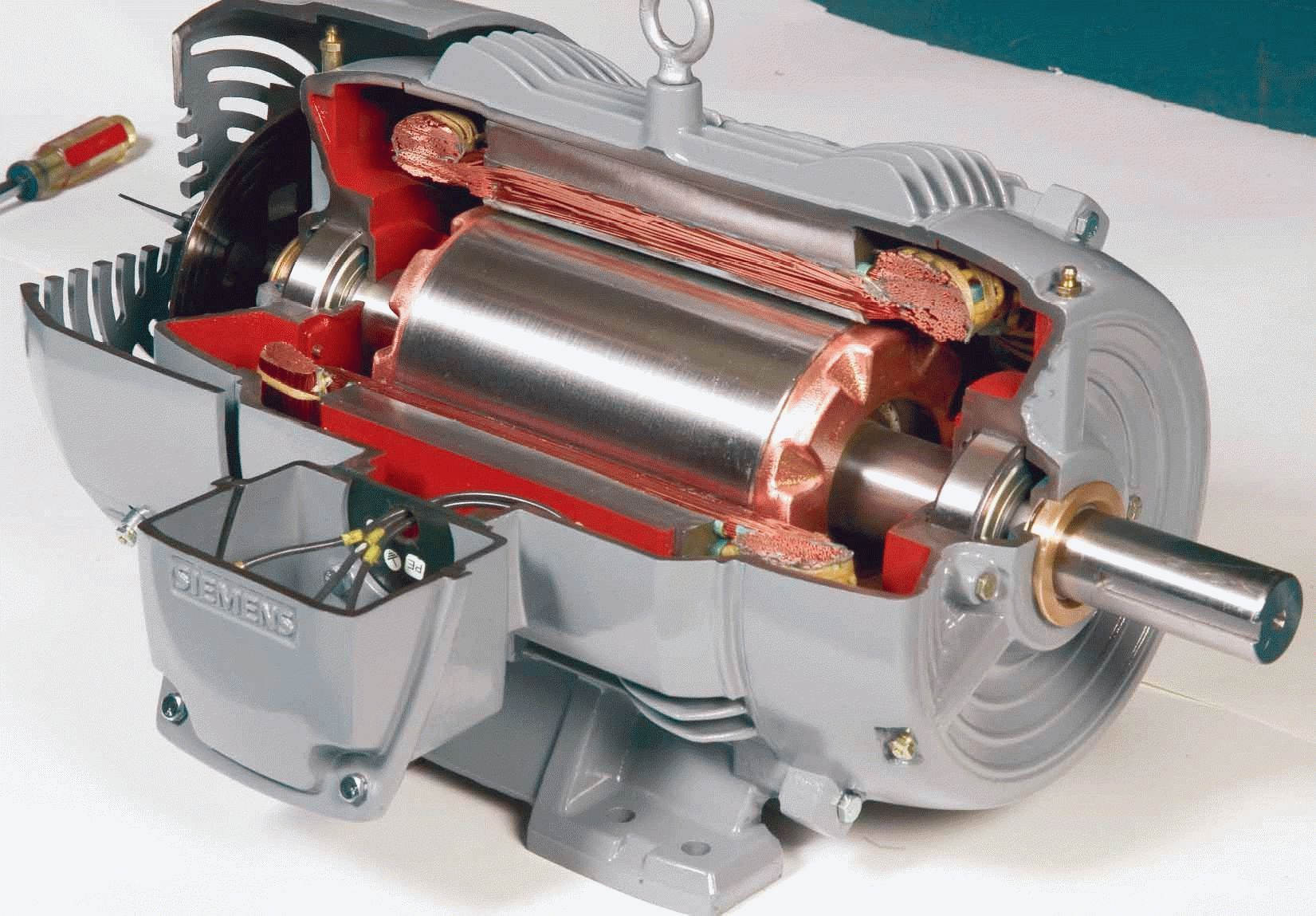
В простом двигателе постоянного тока имеется вращающееся магнитное поле, полярность которого меняется каждые пол-оборота с помощью комбинации щеточного коммутатора.Щетки — в основном проводящие углеродные стержни, которые касаются проводов на роторе при их вращении — также служат для передачи электрического тока во вращающийся якорь. В бесщеточном двигателе постоянного тока ситуация несколько иная. Вращающееся поле все еще меняется на противоположное, но посредством коммутации, которая происходит в электронном виде.
Асинхронный двигатель обладает уникальным качеством, заключающимся в отсутствии электрического соединения между неподвижной и вращающейся обмотками. Сетевой переменный ток подается на клеммы двигателя и питает неподвижные обмотки.
Все асинхронные двигатели являются асинхронными двигателями. Асинхронное название возникает из-за разницы между скоростью вращения поля статора и несколько более низкой скоростью ротора.
Ротор с короткозамкнутым ротором от асинхронного двигателя.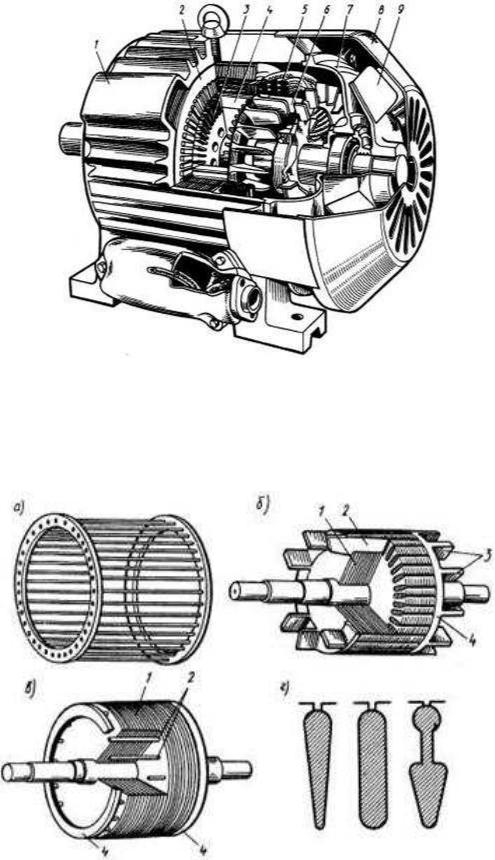 Этот пример взят из небольшого вентилятора.
Этот пример взят из небольшого вентилятора.Большинство современных асинхронных двигателей имеют ротор в виде беличьей клетки. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически закорачивают стержни вместе.Твердый сердечник ротора состоит из пакетов листовой электротехнической стали.
Также можно найти асинхронные двигатели, содержащие роторы, состоящие из обмоток, а не из короткозамкнутого ротора. Они называются асинхронными двигателями с фазным ротором. Смысл конструкции в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель впервые начинает вращаться. Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо.Когда ротор достигает конечной скорости, полюса ротора замыкаются на короткое замыкание, таким образом, электрически они становятся такими же, как ротор с короткозамкнутым ротором.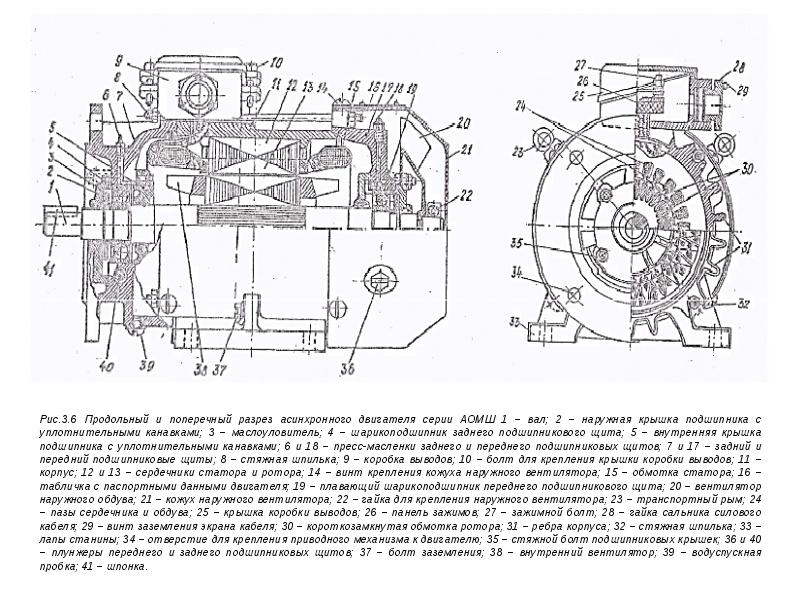
Стационарная часть обмоток асинхронного двигателя (статор) подключается к источнику переменного тока. Подача напряжения на статор вызывает прохождение переменного тока в обмотках статора. Поток тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора.Но положение полюса статора меняется при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс в роторе пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот. Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора, потому что поле ротора всегда на некоторую величину отстает от поля статора. Эта задержка заставляет ротор вращаться со скоростью, несколько меньшей, чем скорость поля статора. Разница между ними называется скольжением.
Эта задержка заставляет ротор вращаться со скоростью, несколько меньшей, чем скорость поля статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит в основном от нагрузки двигателя, но также зависит от сопротивления цепи ротора и силы поля, создаваемого магнитным потоком статора. Скольжение в двигателе конструкции B составляет от 0,5% до 5%.
Когда двигатель остановлен, обмотки ротора и статора фактически являются первичной и вторичной обмотками трансформатора.Когда к статору сначала подается переменный ток, ротор не движется. Таким образом, индуцированное в роторе напряжение имеет ту же частоту, что и напряжение статора. Когда ротор начинает вращаться, частота наведенного в нем напряжения f r падает. Если f — частота напряжения статора, то скольжение s связывает эти два параметра через f r = sf. Здесь s выражается в виде десятичной дроби.
Поскольку асинхронный двигатель не имеет щеток, коллектора или подобных движущихся частей, его производство и обслуживание дешевле, чем другие типы двигателей.
Для сравнения, рассмотрим синхронный двигатель. Здесь ротор вращается с той же скоростью, то есть синхронно, с магнитным полем статора. Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к источнику переменного тока, как в асинхронном двигателе. Магнитное поле статора вращается синхронно с частотой сети.
Обмотка ротора синхронного двигателя может получать ток различными способами, но обычно не за счет индукции (за исключением некоторых конструкций, только для обеспечения пускового момента).Тот факт, что ротор вращается синхронно с частотой сети переменного тока, делает синхронный двигатель полезным для управления высокоточными часами.
Следует подчеркнуть, что ротор синхронного двигателя переменного тока вращается синхронно с целым числом циклов переменного тока. Это не то же самое, что сказать, что он вращается со скоростью, равной частоте сети. Обороты ротора двигателя, то есть синхронная скорость N, составляет:
N = 120 футов / P = 60 кадров
Где f — частота сети переменного тока в Гц, P — количество полюсов (на фазу), а p — количество пар полюсов на фазу.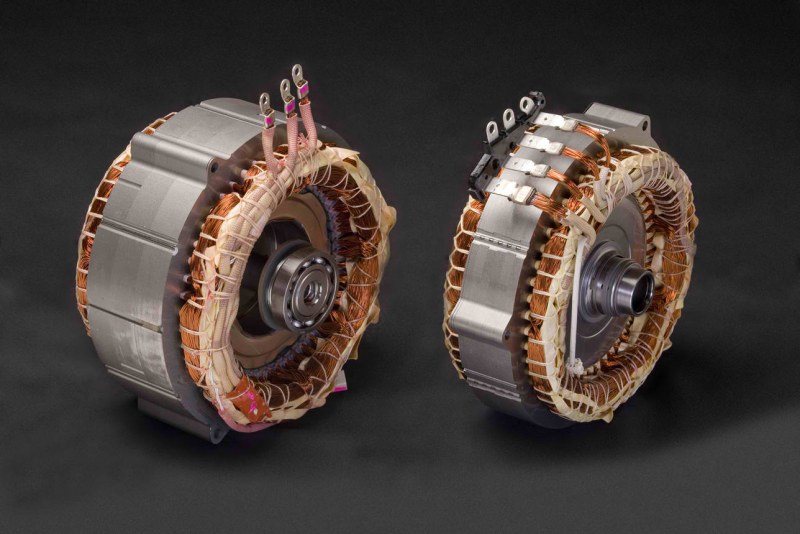
Соответственно, чем больше полюсов, тем медленнее вращается синхронный двигатель. При равной мощности дороже построить более медленный двигатель. При 60 Гц:
- Двухполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 3600 об / мин.
- Четырехполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1800 об / мин.
- Шестиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1200 об / мин.
- Восьмиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 900 об / мин
- Десятиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 720 об / мин.
- Двенадцатиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 600 об / мин.
малой мощности полезны там, где требуется точное время. Синхронные двигатели переменного тока высокой мощности, хотя и более дорогие, чем трехфазные асинхронные двигатели, обладают двумя дополнительными качествами.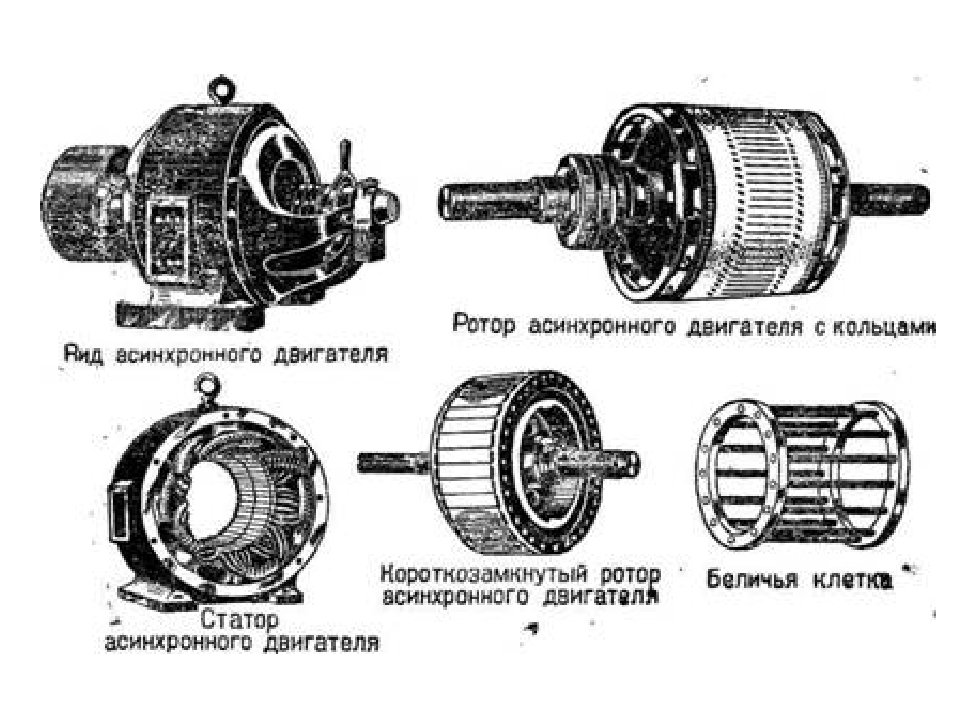 Несмотря на более высокую начальную стоимость, они могут окупиться в долгосрочной перспективе, поскольку они более энергоэффективны, чем другие типы двигателей. Во-вторых, иногда одновременно они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, а также выполнять полезную работу.
Несмотря на более высокую начальную стоимость, они могут окупиться в долгосрочной перспективе, поскольку они более энергоэффективны, чем другие типы двигателей. Во-вторых, иногда одновременно они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, а также выполнять полезную работу.
Существует несколько различных типов синхронных двигателей переменного тока. Их обычно классифицируют по способам создания магнитного поля. Двигатели с независимым возбуждением имеют магнитные полюса, питаемые от внешнего источника. Напротив, магнитные полюса возбуждаются самим двигателем в самовозбуждаемой (также иногда называемой невозбужденной и непосредственно возбужденной) машиной. Типы без возбуждения включают реактивные двигатели, двигатели с гистерезисом и двигатели с постоянными магнитами. Кроме того, существуют двигатели с возбуждением от постоянного тока.
Синхронные двигатели без возбуждения имеют стальные роторы.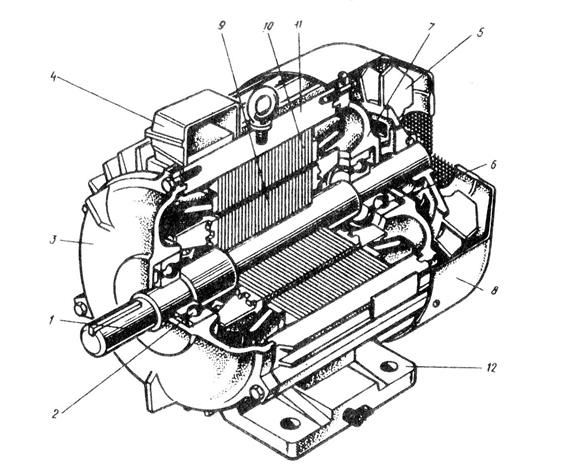 В процессе работы ротор намагничивается необходимыми магнитными полюсами аналогично тому, как это происходит в асинхронном двигателе. Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью, пока требуемый крутящий момент низкий.
В процессе работы ротор намагничивается необходимыми магнитными полюсами аналогично тому, как это происходит в асинхронном двигателе. Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью, пока требуемый крутящий момент низкий.
В реактивном электродвигателе ротор имеет выступающие полюса, напоминающие отдельные зубцы. Ротора меньше, чем полюсов статора, что препятствует совмещению полюсов статора и ротора, и в этом случае вращения не будет. Реактивные двигатели не запускаются автоматически. По этой причине в ротор часто встраивают специальные обмотки (так называемые обмотки с короткозамкнутым ротором), поэтому реактивный двигатель запускается как асинхронный.
Двигатель с гистерезисом использует широкую петлю гистерезиса в роторе из кобальтовой стали с высокой коэрцитивной силой. Из-за гистерезиса фаза намагничивания в роторе отстает от фазы вращающегося магнитного поля статора. Эта задержка создает крутящий момент. При синхронной скорости поля ротора и статора блокируются для обеспечения непрерывного вращения. Одним из преимуществ гистерезисного двигателя является то, что он самозапускается.
Из-за гистерезиса фаза намагничивания в роторе отстает от фазы вращающегося магнитного поля статора. Эта задержка создает крутящий момент. При синхронной скорости поля ротора и статора блокируются для обеспечения непрерывного вращения. Одним из преимуществ гистерезисного двигателя является то, что он самозапускается.
Синхронный двигатель переменного тока с постоянными магнитами имеет постоянные магниты, встроенные в ротор. От этих двигателей питаются новейшие лифты, и коробка передач не требуется.
Пример двигателя с постоянным магнитом с электронной коммутацией, в данном случае от небольшого воздушного вентилятора.Этот стиль называется аутраннером, потому что ротор находится вне статора, встроен в лопасти вентилятора. Это четырехполюсный двигатель, о чем свидетельствуют четыре обмотки статора (внизу). Также виден датчик Холла, который обеспечивает часть электронной коммутации. Синхронный двигатель с прямым возбуждением может называться различными именами, включая ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянным магнитом.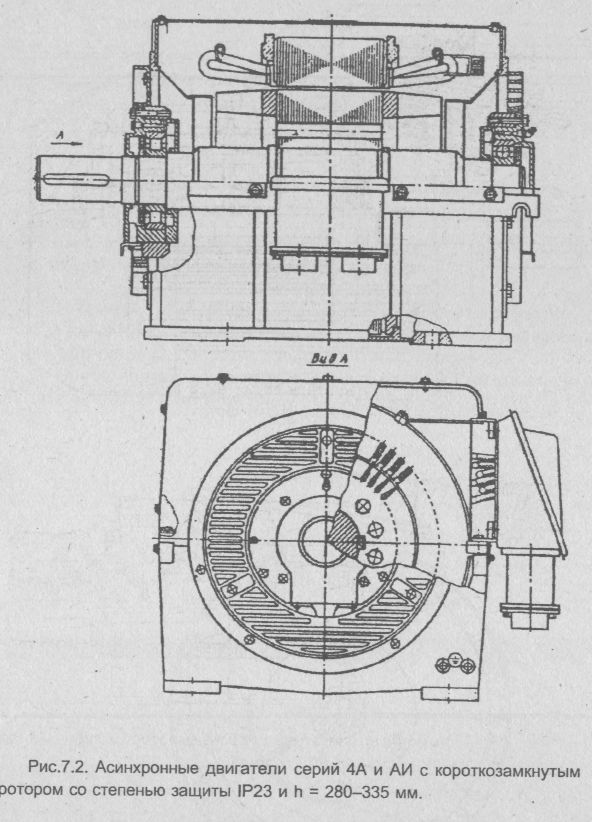 Ротор содержит постоянные магниты.Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется двигателем с внутренним постоянным магнитом).
Ротор содержит постоянные магниты.Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется двигателем с внутренним постоянным магнитом).
Компьютер контролирует последовательное включение питания обмоток статора в нужное время с помощью твердотельных переключателей. Питание подается на катушки, намотанные на зубья статора, и если выступающий полюс ротора идеально совмещен с зубом статора, крутящий момент не создается.Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере некоторый магнитный поток пересекает зазор под углом, не перпендикулярным поверхностям зуба. В результате возникает крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает диаграмму потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Еще один тип синхронного двигателя — это реактивный двигатель с регулируемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов.Зубы магнитопроницаемы, а окружающие их участки слабо проницаемы из-за прорезанных в них пазов.
В отличие от асинхронных двигателей, здесь нет стержней ротора, и, следовательно, в роторе отсутствует ток, создающий крутящий момент. Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, в которых используются роторы, несущие проводники.
Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора.Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен способу регулирования скорости с помощью тока якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки.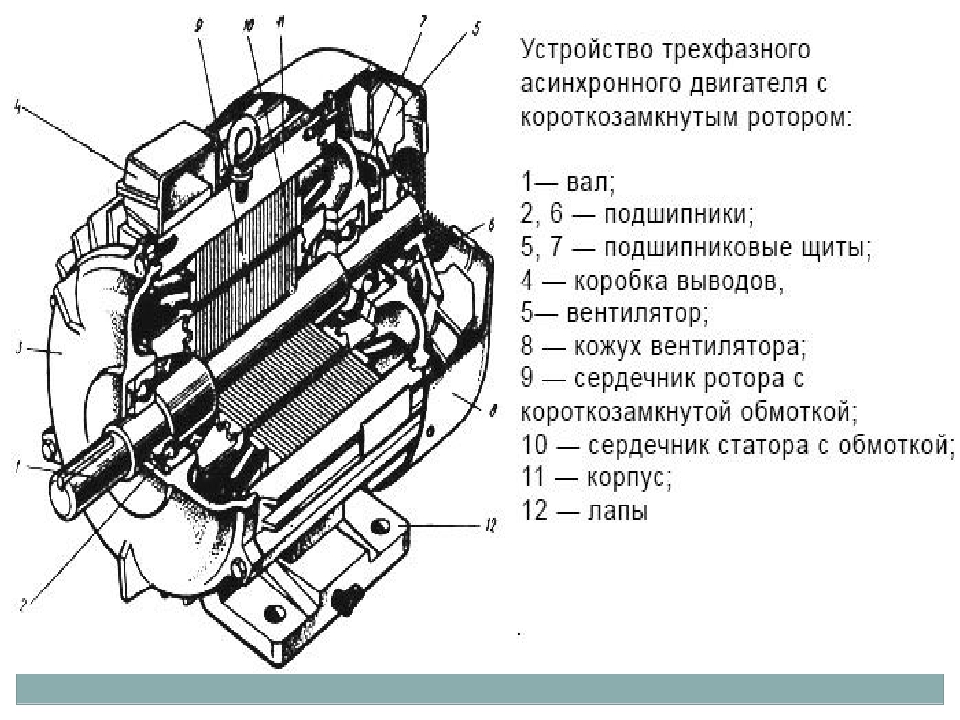 Скорость двигателя не влияет на производство крутящего момента. Это не похоже на асинхронные двигатели переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения числа оборотов двигателя.
Скорость двигателя не влияет на производство крутящего момента. Это не похоже на асинхронные двигатели переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения числа оборотов двигателя.
И, наконец, синхронный двигатель переменного тока с возбуждением постоянным током. Для создания магнитного поля требуется выпрямленный источник питания. Эти двигатели обычно имеют мощность, превышающую одну лошадиную силу.
▷ Синхронные и асинхронные двигатели — где их использовать?
Многие люди часто путаются с терминами «синхронные» и «асинхронные двигатели» и с их областями применения. Именно поэтому эту статью написал один из новейших членов Электротехнического сообщества.Проверьте это ниже:
Следующая информация касается общих принципов работы синхронных и асинхронных двигателей, их преимуществ, а также где они обычно используются и что можно достичь с помощью каждого из этих двигателей.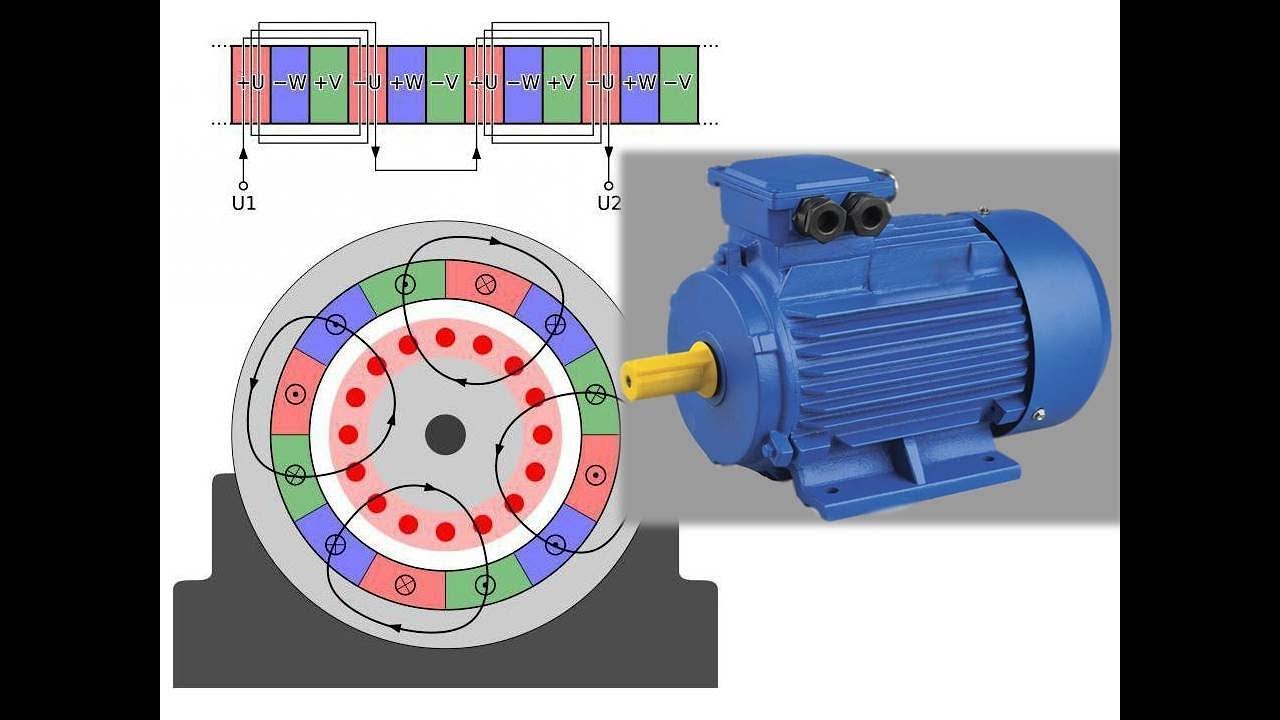
Давайте сначала сконцентрируемся на их принципах работы…
Синхронные и асинхронные двигатели — принципы работы
Синхронные двигатели
Это типичный электродвигатель переменного тока, способный развивать синхронную скорость.В этих двигателях и статор, и ротор вращаются с одинаковой скоростью, что обеспечивает синхронизацию. Основной принцип работы заключается в том, что когда двигатель подключен к сети, электричество течет в обмотки статора, создавая вращающееся электромагнитное поле. Это, в свою очередь, индуцируется на обмотках ротора, который затем начинает вращаться.
Требуется внешний источник постоянного тока, чтобы синхронизировать направление и положение вращения ротора с направлением вращения статора. В результате такой блокировки двигатель либо должен работать синхронно, либо не запускаться совсем.
Асинхронные двигатели
Принцип работы асинхронных двигателей почти такой же, как и у синхронных двигателей, за исключением того, что к ним не подключен внешний возбудитель.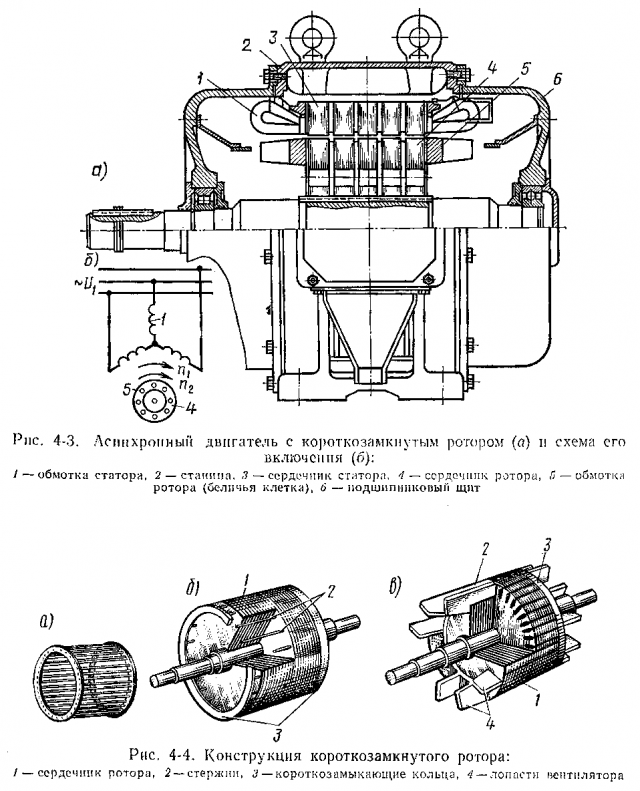 Проще говоря, асинхронные двигатели, также известные как асинхронные двигатели, также работают по принципу электромагнитной индукции, в которых ротор не получает никакой электроэнергии за счет теплопроводности, как в случае двигателей постоянного тока.
Проще говоря, асинхронные двигатели, также известные как асинхронные двигатели, также работают по принципу электромагнитной индукции, в которых ротор не получает никакой электроэнергии за счет теплопроводности, как в случае двигателей постоянного тока.
Единственная загвоздка здесь в том, что в асинхронных двигателях нет внешнего устройства, подключенного для возбуждения ротора, и, следовательно, скорость ротора зависит от переменной магнитной индукции.Это изменяющееся электромагнитное поле заставляет ротор вращаться со скоростью, меньшей, чем скорость магнитного поля статора. Поскольку скорость ротора и скорость магнитного поля статора меняются, эти двигатели известны как асинхронные двигатели. Разница в скорости известна как «скольжение».
Синхронные и асинхронные двигатели — преимущества и недостатки
- Синхронный двигатель работает с постоянной скоростью и заданной частотой независимо от нагрузки. Но скорость асинхронного двигателя уменьшается с увеличением нагрузки.
- Синхронный двигатель может работать в широком диапазоне коэффициентов мощности, как с запаздыванием, так и с опережением, тогда как асинхронный двигатель всегда работает с запаздывающим коэффициентом мощности, который может быть очень низким при уменьшающихся нагрузках.
- Синхронный двигатель не запускается автоматически, тогда как асинхронный двигатель может запускаться самостоятельно.
- На крутящий момент синхронного двигателя не влияют изменения приложенного напряжения, как на асинхронный двигатель.
- Для запуска синхронного двигателя требуется внешнее возбуждение постоянного тока, но асинхронный двигатель не требует внешнего возбуждения для работы.
- Синхронные двигатели обычно дороги и сложны по сравнению с асинхронными двигателями, которые менее дороги и удобны для пользователя.
- Синхронные двигатели особенно хороши для низкоскоростных приводов (ниже 300 об / мин), потому что их коэффициент мощности всегда можно отрегулировать до 1,0, и они очень эффективны. С другой стороны, асинхронные двигатели отлично подходят для скоростей выше 600 об / мин.
- В отличие от асинхронных двигателей, синхронные двигатели могут работать на сверхнизких скоростях за счет использования мощных электронных преобразователей, которые генерируют очень низкие частоты.Их можно использовать для привода дробилок, вращающихся печей и шаровых мельниц с регулируемой скоростью.
Синхронные и асинхронные двигатели — применение
Применение синхронных двигателей
- Они обычно используются на электростанциях для достижения соответствующего коэффициента мощности. Они работают параллельно шинам и часто перегружаются извне для достижения желаемого коэффициента мощности.
- Они также используются в обрабатывающих отраслях, где используется большое количество асинхронных двигателей и трансформаторов для преодоления отставания p.f.
- Используется на электростанциях для выработки электроэнергии с заданной частотой.
- Используется для управления напряжением путем изменения его возбуждения в линиях передачи.
Применение асинхронных двигателей
Более 90% двигателей, используемых в мире, являются асинхронными двигателями, и они находят широкое применение в самых разных областях. Вот некоторые из них:
- Центробежные вентиляторы, нагнетатели и насосы
- Компрессоры
- Конвейеры
- Подъемники, а также краны большой грузоподъемности
- Станки токарные
- Масляная, текстильная, бумажная фабрики и т. Д.
Заключение
В заключение, синхронные двигатели используются только тогда, когда от машины требуются характеристики низкой или сверхнизкой скорости, а также при желаемых коэффициентах мощности (как отстающих, так и опережающих). В то время как асинхронные двигатели преимущественно используются в большинстве вращающихся или движущихся машин, таких как вентиляторы, подъемники, шлифовальные машины и т. Д.
Что вы думаете об этой статье? Вам это помогло?
Разница между синхронным и асинхронным двигателем
Разница между синхронным двигателем и асинхронным двигателем объясняется с учетом таких факторов, как его тип, скольжение, потребность в дополнительном источнике питания, требования к контактным кольцам и щеткам, их стоимость, эффективность, коэффициент мощности, источник тока, скорость, самозапуск , влияние на крутящий момент из-за изменения напряжения, их рабочей скорости и различных применений как синхронного, так и асинхронного двигателя.
Различия между синхронным и асинхронным двигателем объясняются ниже в табличной форме.
| BASIS | СИНХРОННЫЙ ДВИГАТЕЛЬ | АСИНХРОННЫЙ ДВИГАТЕЛЬ |
|---|---|---|
| Определение | Синхронный двигатель — это машина, скорость ротора которой равна скорости магнитного поля статора. N = NS = 120f / P | Асинхронный двигатель — это машина, ротор которой вращается со скоростью, меньшей, чем синхронная скорость. N |
| Тип | Бесщеточный двигатель, двигатель с регулируемым сопротивлением, двигатель с регулируемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. | Асинхронный двигательпеременного тока известен как асинхронный двигатель. |
| Скольжение | Без проскальзывания. Значение скольжения равно нулю. | Имеют пробуксовку, поэтому величина пробуксовки не равна нулю. |
| Дополнительный источник питания | Требуется дополнительный источник питания постоянного тока для первоначального вращения ротора, близкого к синхронной скорости. | Не требует дополнительных источников запуска. |
| Контактное кольцо и щетки | Требуются контактное кольцо и щетки | Контактное кольцо и щетки не требуются. |
| Стоимость | Синхронный двигатель дороже по сравнению с асинхронным двигателем | Дешевле |
| КПД | КПД выше, чем у асинхронного двигателя. | Менее эффективный |
| Коэффициент мощности | Изменяя возбуждение, коэффициент мощности может быть соответственно отрегулирован как отстающий, опережающий или единичный. | Асинхронный двигатель работает только с отстающим коэффициентом мощности. |
| Электропитание | Ток подается на ротор синхронного двигателя | Ротор асинхронного двигателя не требует тока. |
| Скорость | Скорость двигателя не зависит от изменения нагрузки. Это постоянно. | Скорость асинхронного двигателя уменьшается с увеличением нагрузки. |
| Самозапуск | Синхронный двигатель не самозапускается | Самозапускается |
| Влияние на крутящий момент | Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя | Изменение приложенного напряжения влияет на крутящий момент асинхронного двигателя |
| Рабочая скорость | Они работают плавно и относительно хорошо на низкой скорости, ниже 300 об / мин. | Двигатель со скоростью выше 600 об / мин работает отлично. |
| Применения | Синхронные двигатели используются на электростанциях, обрабатывающей промышленности и т. Д. Они также используются в качестве регулятора напряжения. | Используется в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и подъемниках. и т. д. |
Синхронный двигатель — это двигатель, который работает с синхронной скоростью, то есть скорость ротора равна скорости статора двигателя.Отсюда следует соотношение N = N S = 120f / P, где N — скорость ротора, а Ns — синхронная скорость.
Асинхронный двигатель — это асинхронный двигатель переменного тока. Ротор асинхронного двигателя вращается со скоростью меньше синхронной, т.е. N
Подробное объяснение разницы между синхронным и асинхронным двигателем приведено ниже.
- Синхронный двигатель — это машина, у которой скорость ротора и скорость магнитного поля статора равны.Асинхронный двигатель — это машина, ротор которой вращается со скоростью меньше синхронной.
- Бесщеточный двигатель, двигатель с регулируемым сопротивлением, двигатель с регулируемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. Асинхронный двигатель переменного тока известен как асинхронный двигатель.
- Синхронный двигатель не имеет скольжения. Значение скольжения равно нулю. Асинхронный двигатель имеет скольжение, поэтому значение скольжения не равно нулю.
- Синхронному двигателю требуется дополнительный источник постоянного тока для первоначального вращения ротора, близкого к синхронной скорости.Асинхронный двигатель не требует дополнительного источника пуска.
- Контактное кольцо и щетки необходимы в синхронном двигателе, тогда как асинхронный двигатель не требует контактного кольца и щеток. Только асинхронный двигатель с обмоткой требует и контактного кольца, и щеток.
- Синхронный двигатель дороже по сравнению с асинхронным двигателем.
- КПД синхронного двигателя больше, чем у асинхронного двигателя.
- Путем изменения возбуждения коэффициент мощности синхронного двигателя может быть отрегулирован соответственно как отстающий, опережающий или единичный, тогда как асинхронный двигатель работает только с отстающим коэффициентом мощности.
- На ротор синхронного двигателя подается ток. Ротор асинхронного двигателя не требует тока.
- Скорость синхронного двигателя не зависит от изменения нагрузки. Это постоянно. Скорость асинхронного двигателя уменьшается с увеличением нагрузки.
- Синхронный двигатель не запускается автоматически, тогда как асинхронный двигатель запускается автоматически.
- Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя, но влияет на крутящий момент асинхронного двигателя.
- Синхронный двигатель работает плавно и относительно хорошо на низкой скорости, которая ниже 300 об / мин, тогда как скорость выше 600 об / мин работа асинхронного двигателя превосходна. Асинхронные двигатели используются в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и лифтах. и т. д.
- Синхронный двигатель используется в различных сферах применения на электростанциях, обрабатывающей промышленности и т. Д. Он также используется в качестве регулятора напряжения.
Типы трехфазных асинхронных двигателей
Асинхронный двигатель также называют асинхронным двигателем, поскольку он работает со скоростью, отличной от синхронной.Как и любой другой электродвигатель, асинхронные двигатели состоят из двух основных частей — ротора и статора.
Статор
Как видно из названия, статор является неподвижной частью асинхронного двигателя. Трехфазное питание подается на статор асинхронного двигателя.
Ротор
Ротор — это вращающаяся часть асинхронного двигателя. Ротор связан с механической нагрузкой через вал. Роторы трехфазного асинхронного двигателя далее классифицируются как:
- Ротор с короткозамкнутым ротором
- Ротор с скользящим кольцом или ротор с фазовой обмоткой или ротор с фазовой обмоткой
В зависимости от типа используемого ротора трехфазный асинхронный двигатель классифицируется как :
- Асинхронный двигатель с короткозамкнутым ротором
- Асинхронный двигатель с контактным кольцом или асинхронный двигатель с обмоткой ротора или асинхронный двигатель с фазовой обмоткой
Конструкция статора для обоих трехфазных асинхронных двигателей остается неизменной и кратко обсуждается ниже.
Статор трехфазного асинхронного двигателя
Статор трехфазного асинхронного двигателя состоит из трех основных частей:
- Рама статора
- Сердечник статора
- Обмотка статора или обмотка возбуждения
Рама статора
Это внешняя часть трехфазного асинхронного двигателя. Его основная функция — поддерживать сердечник статора и обмотку возбуждения. Он действует как покрытие и обеспечивает защиту и механическую прочность всех внутренних частей машины.Рама изготавливается из литой под давлением или сварной стали. Рама трехфазного асинхронного двигателя должна быть прочной и жесткой, так как длина воздушного зазора трехфазного асинхронного двигателя очень мала. В противном случае ротор не будет оставаться концентрическим относительно статора, что вызовет несбалансированное магнитное притяжение.
Сердечник статора
Основная функция сердечника статора — переносить переменный магнитный поток. Для уменьшения потерь на вихревые токи сердечник статора ламинирован. Этот ламинированный тип структуры состоит из штамповки, которая составляет около 0.Толщиной от 4 до 0,5 мм. Все штамповки штампуются вместе, образуя сердечник статора, который затем помещается в раму статора. Штамповки обычно изготавливаются из кремнистой стали, что снижает потери на гистерезис.
Обмотка статора или обмотка возбуждения
В пазах на периферии сердечника статора трехфазного асинхронного двигателя расположены трехфазные обмотки. Эта трехфазная обмотка питается от трехфазного источника переменного тока. Три фазы обмотки соединены звездой или треугольником, в зависимости от того, какой метод запуска используется.
Двигатель с короткозамкнутым ротором в основном запускается статером звезда-треугольник, и, следовательно, статор двигателя с короткозамкнутым ротором соединен треугольником. Трехфазный асинхронный двигатель с контактным кольцом запускается путем вставки сопротивлений, поэтому обмотка статора может быть подключена по схеме звезды или треугольника. Обмотка, намотанная на статор трехфазного асинхронного двигателя, также называется обмоткой возбуждения, и когда эта обмотка возбуждается трехфазным источником переменного тока, она создает вращающееся магнитное поле.
Принцип работы трехфазного асинхронного двигателя Видео
Однофазные асинхронные двигатели | Двигатели переменного тока
Трехфазный двигатель может работать от однофазного источника питания.Однако он не запускается самостоятельно. Его можно запустить вручную в любом направлении и набрать скорость за несколько секунд. Он будет развивать только 2/3 номинальной мощности 3-φ, потому что одна обмотка не используется.
Двигатель с 3 фазами работает от мощности 1 фазы, но не запускается
Одиночная катушка однофазного двигателя
Одинарная катушка однофазного асинхронного двигателя создает не вращающееся магнитное поле, а пульсирующее поле, достигающее максимальной напряженности при 0 ° и 180 ° электрического поля.
Однофазный статор создает невращающееся пульсирующее магнитное поле
Другая точка зрения заключается в том, что одиночная катушка, возбуждаемая однофазным током, создает два вектора магнитного поля, вращающихся в противоположных направлениях, совпадающих дважды за оборот при 0 ° (рисунок выше-a) и 180 ° (рисунок e). Когда векторы поворачиваются на 90 ° и -90 °, они отменяются на рисунке c.
При 45 ° и -45 ° (рисунок b) они частично складываются по оси + x и сокращаются по оси y.Аналогичная ситуация существует на рисунке d. Сумма этих двух векторов — это вектор, неподвижный в пространстве, но чередующийся во времени. Таким образом, пусковой крутящий момент не создается.
Однако, если ротор вращается вперед со скоростью немного меньшей, чем синхронная скорость, он будет развивать максимальный крутящий момент при 10% скольжении относительно вектора прямого вращения. Меньший крутящий момент будет развиваться выше или ниже 10% скольжения.
Ротор будет испытывать скольжение на 200% — 10% относительно вектора магнитного поля, вращающегося в противоположных направлениях.Небольшой крутящий момент (см. Кривую зависимости крутящего момента от скольжения), за исключением двукратной пульсации частоты, вырабатывается вектором встречного вращения. Таким образом, однофазная катушка будет развивать крутящий момент после запуска ротора.
Если ротор запускается в обратном направлении, он будет развивать такой же большой крутящий момент, поскольку он приближается к скорости вращающегося в обратном направлении вектора.
Однофазные асинхронные двигатели имеют медную или алюминиевую беличью клетку, встроенную в цилиндр из стальных пластин, типичных для многофазных асинхронных двигателей.
Двигатель с постоянным разделением конденсаторов
Одним из способов решения проблемы с однофазным двигателем является создание двухфазного двигателя, получающего двухфазное питание от однофазного. Для этого требуется двигатель с двумя обмотками, разнесенными друг от друга на 90 ° , электрический, питаемый двумя фазами тока, смещенными во времени на 90 ° . Это называется конденсаторным двигателем с постоянным разделением.
Асинхронный двигатель с постоянным разделением конденсаторов
Этот тип двигателя подвержен увеличенной величине тока и сдвигу во времени назад, когда двигатель набирает скорость, с пульсациями крутящего момента на полной скорости.Решение состоит в том, чтобы уменьшить емкость конденсатора (импеданс), чтобы минимизировать потери.
Потери меньше, чем у двигателя с экранированными полюсами. Эта конфигурация двигателя хорошо работает до 1/4 лошадиных сил (200 Вт), хотя обычно применяется к двигателям меньшего размера. Направление двигателя легко изменить, включив конденсатор последовательно с другой обмоткой. Этот тип двигателя может быть адаптирован для использования в качестве серводвигателя, описанного в другом месте в этой главе.
Однофазный асинхронный двигатель со встроенными катушками статора
Однофазные асинхронные двигатели могут иметь катушки, встроенные в статор двигателей большего размера.Тем не менее, меньшие размеры требуют меньшего количества сложностей для создания концентрированных обмоток с выступающими полюсами.
Асинхронный двигатель с конденсаторным пуском
На рисунке ниже конденсатор большего размера может использоваться для пуска однофазного асинхронного двигателя через вспомогательную обмотку, если он отключается центробежным переключателем, когда двигатель набирает скорость. Кроме того, во вспомогательной обмотке может быть намного больше витков из более тяжелого провода, чем в двигателе с разделенным сопротивлением, чтобы уменьшить чрезмерное повышение температуры.
В результате для тяжелых нагрузок, таких как компрессоры кондиционеров, доступен больший пусковой крутящий момент. Эта конфигурация двигателя работает настолько хорошо, что доступна в многомощных (несколько киловаттных) размерах.
Асинхронный двигатель с конденсаторным пуском
Конденсаторный асинхронный двигатель
Вариант двигателя с конденсаторным пуском (рисунок ниже) заключается в запуске двигателя с относительно большим конденсатором для высокого пускового момента, но с оставлением конденсатора меньшей емкости на месте после запуска для улучшения рабочих характеристик, не потребляя чрезмерного тока.Дополнительная сложность конденсаторного двигателя оправдана для двигателей большего размера.
Асинхронный двигатель с конденсаторным двигателем
Пусковой конденсатор двигателя может быть неполярным электролитическим конденсатором с двойным анодом, который может представлять собой два последовательно соединенных поляризованных электролитических конденсатора + к + (или — к -). Такие электролитические конденсаторы переменного тока имеют такие высокие потери, что их можно использовать только в прерывистом режиме (1 секунда во включенном состоянии, 60 секунд в выключенном состоянии), например, при запуске двигателя.
Конденсатор для работы двигателя должен быть не электролитического типа, а из полимера с меньшими потерями.
Асинхронный двигатель с двухфазным двигателем, сопротивление
Если во вспомогательной обмотке гораздо меньше витков, меньший провод размещен под углом 90 ° к главной обмотке, он может запустить однофазный асинхронный двигатель. При более низкой индуктивности и более высоком сопротивлении ток будет испытывать меньший фазовый сдвиг, чем основная обмотка.
Может быть получено около 30 ° разности фаз.Эта катушка создает умеренный пусковой момент, который отключается центробежным переключателем на 3/4 синхронной скорости. Эта простая (без конденсатора) конструкция хорошо подходит для двигателей мощностью до 1/3 лошадиных сил (250 Вт), управляющих легко запускаемыми нагрузками.
Асинхронный электродвигатель с разделенным фазным сопротивлением
Этот двигатель имеет больший пусковой крутящий момент, чем двигатель с экранированными полюсами (следующий раздел), но не такой большой, как двухфазный двигатель, построенный из тех же частей.Плотность тока во вспомогательной обмотке настолько высока во время пуска, что последующий быстрый рост температуры исключает частый перезапуск или медленные пусковые нагрузки.
Корректор коэффициента мощности Nola
Фрэнк Нола из НАСА предложил корректор коэффициента мощности для повышения эффективности асинхронных двигателей переменного тока в середине 1970-х годов. Он основан на предположении, что асинхронные двигатели неэффективны при нагрузке ниже полной. Эта неэффективность коррелирует с низким коэффициентом мощности.
Коэффициент мощности меньше единицы возникает из-за тока намагничивания, необходимого для статора.Этот фиксированный ток составляет большую долю от общего тока двигателя по мере уменьшения нагрузки двигателя. При небольшой нагрузке полный ток намагничивания не требуется. Его можно уменьшить, уменьшив подаваемое напряжение, улучшив коэффициент мощности и эффективность.
Корректор коэффициента мощности определяет коэффициент мощности и снижает напряжение двигателя, тем самым восстанавливая более высокий коэффициент мощности и уменьшая потери.
Поскольку однофазные двигатели примерно в 2–4 раза менее эффективны, чем трехфазные двигатели, существует потенциальная экономия энергии для двигателей 1-φ.Для полностью нагруженного двигателя нет экономии, поскольку требуется весь ток намагничивания статора.
Напряжение не может быть уменьшено. Но есть потенциальная экономия от менее чем полностью загруженного двигателя. Двигатель с номинальным напряжением 117 В переменного тока рассчитан на работу при напряжении от 127 В переменного тока до 104 В переменного тока. Это означает, что он не полностью загружен при работе с напряжением более 104 В переменного тока, например, с холодильником на 117 В переменного тока.
Контроллер коэффициента мощности может безопасно снизить сетевое напряжение до 104–110 В переменного тока.Чем выше начальное напряжение в сети, тем больше потенциальная экономия. Конечно, если энергокомпания подаст напряжение ближе к 110 В переменного тока, двигатель будет работать более эффективно без каких-либо дополнительных устройств.
Любой практически неработающий однофазный асинхронный двигатель с 25% FLC или менее является кандидатом на использование PFC. Однако он должен работать большое количество часов в год. И чем больше времени он простаивает, как на пилораме, штамповочном прессе или конвейере, тем выше вероятность оплаты контроллера через несколько лет эксплуатации.
За него должно быть втрое легче платить по сравнению с более эффективным 3-φ-двигателем. Стоимость PFC не может быть возмещена для двигателя, работающего всего несколько часов в день.
Описание: Однофазные асинхронные двигатели
- Однофазные асинхронные двигатели не могут запускаться самостоятельно без вспомогательной обмотки статора, приводимой в действие противофазным током около 90 ° . После запуска вспомогательная обмотка необязательна.
- Вспомогательная обмотка конденсаторного двигателя с постоянным разделением каналов имеет конденсатор, включенный последовательно с ней во время пуска и работы.
- Асинхронный двигатель с конденсаторным запуском имеет только конденсатор, включенный последовательно со вспомогательной обмоткой во время запуска.
- Конденсаторный двигатель обычно имеет большой неполяризованный электролитический конденсатор, включенный последовательно со вспомогательной обмоткой для запуска, а затем меньший неэлектролитический конденсатор во время работы.